RIL QMI Linux Data Start Guide
- 格式:docx
- 大小:23.93 KB
- 文档页数:7
Linux下MQ操作下面是测试配置:Sender(QM_SENDER)-----Receiver(QM_RECEIVER))remote(SERVER):管理器:QM_SENDER远程队列:QR传输队列:QX通道: CQM_SENDER------------------------DEFINE QREMOTE(QR) RNAME(QL) RQMNAME(QM_RECEIVER) XMITQ(QX) REPLACEDEFINE QLOCAL(QX) USAGE(XMITQ) REPLACEDEFINE CHANNEL(C) CHLTYPE(SDR) TRPTYPE(TCP) CONNAME('192.168.1.80(1416)') XMITQ(QX) REPLACElocal(TAN):管理器: QM_RECEIVER本地队列:QL通道: CQM_RECEIVER------------------------------------------------DEFINE QLOCAL (QL) REPLACEDEFINE CHANNEL(C) CHLTYPE(RCVR) TRPTYPE(TCP) REPLACE runmqlsr -m QM_RECEIVER -t tcp -p 1416&runmqsc QM_SENDERstart channel(C)服务器上cd /opt/mqm/samp/bin./amqsput QR QM_SENDER客户机上cd /opt/mqm/samp/bin./amqsget QL QM_RECEIVER在成功安装了WebSphere MQ产品之后,我们可以进行使用和配置,而这些都是通过控制与管理命令完成的。
WebSphere MQ中的控制针对的是MQ部件,通常使用命令方式完成。
管理针对的是WebSphere MQ对象,可以用MQSC脚本命令或图形界面工具完成。

浪潮存储平台系统多路径软件用户手册文档版本发布日期适用版本系统自带多路径的所有版本尊敬的用户:衷心感谢您选用浪潮存储!浪潮存储秉承“云存智用运筹新数据”的新存储之道,致力于为您提供符合新数据时代需求的存储产品和解决方案。
本手册用于帮助您更详细地了解和便捷地使用本存储,涉及的截图仅为示例,最终界面请以实际设备显示的界面为准。
由于产品版本升级或其他原因,本手册内容会不定期进行更新,如有变动恕不另行通知。
除非另有约定,本手册仅作为使用指导,本手册中的所有陈述、信息和建议不构成任何明示或暗示的担保。
浪潮拥有本手册的版权,保留随时修改本手册的权利。
未经浪潮许可,任何单位和个人不得以任何形式复制本手册的内容。
如果您对本手册有任何疑问或建议,请向浪潮电子信息产业股份有限公司垂询。
技术服务电话:4008600011地址:中国济南市浪潮路1036号浪潮电子信息产业股份有限公司邮编:250101在您正式使用本存储之前,请先阅读以下声明。
只有您阅读并且同意以下声明后,方可正式开始使用本存储。
如果您对以下声明有任何疑问,请和您的供货商联系或直接与我们联系。
如您在开始使用本系统前未就以下声明向我们提出疑问,则默认您已经同意了以下声明。
1.请不要自行拆卸本存储的机箱及机箱内任何硬件设备。
在本存储出现任何硬件故障或您希望对硬件进行任何升级时,请您将机器的详细硬件配置反映给我们的客户服务中心。
2.请不要将本存储的设备与任何其他型号的相应设备混用。
本存储的内存、CPU、CPU散热片、风扇、硬盘托架、硬盘等都是特殊规格的。
3.在使用本存储时遇到任何软件问题,请您首先和相应软件的提供商联系。
由提供商和我们联系,以方便我们共同沟通和解决您遇到的问题。
对于数据库、网络管理软件或其他网络产品的安装、运行问题,我们尤其希望您能够这样处理。
4.上架安装本存储前,请先仔细阅读相关产品手册中的快速安装指南。
我们致力于产品功能和性能的持续提升,部分功能及操作与手册描述可能会有所差异,但不会影响使用。

[root@paleonode1 ~]# mount /dev/sdc2 /u1 ‘/加载数据库挂在/u1下[root@paleonode1 ~]# mount /dev/sdb3 /u2 ‘/加载数据库挂在/u2下[root@paleonode1 ~]# su oravis ‘/切换用户oravis[oravis@paleonode1 root]$ pwd ‘/查看当前目录/root[oravis@paleonode1 root]$ cd ~ ‘/进入根[oravis@paleonode1 ~]$ ls ‘/查看内容db oradiag_oravis[oravis@paleonode1 ~]$ pwd ‘/查看当前目录路径/u1/VIS/visora[oravis@paleonode1 ~]$ cd db ‘/进入db目录[oravis@paleonode1 db]$ ls ‘/查看当前目录内容apps_st tech_st[oravis@paleonode1 db]$ cd tech_st ‘/进入tech_st目录[oravis@paleonode1 tech_st]$ cd 11.1.0 ‘/进入11.1.0目录[oravis@paleonode1 11.1.0]$ ls ‘/查看当前目录内容[oravis@paleonode1 11.1.0]$ . ./PROD_paleonode1.env ‘/运行环境变量[oravis@paleonode1 11.1.0]$ cd appsutil ‘/进入appsutil目录[oravis@paleonode1 appsutil]$ cd scripts ‘/进入脚本目录[oravis@paleonode1 scripts]$ cd PROD_paleonode1 ‘/进入PROD_paleonode1目录[oravis@paleonode1 PROD_paleonode1]$ ls ‘/查看当前目录内容adautocfg.sh addbctl.sh adexecsql.pl adpreclone.pl adstrtdb.sqladchknls.pl addlnctl.sh adlsnodes.sh adstopdb.sql[oravis@paleonode1 PROD_paleonode1]$ addbctl.sh start ‘/启动数据库You are running addbctl.sh version 120.1Starting the database PROD ...addbctl.sh: exiting with status 0 ‘/启动数据库结束后。
IT运维监控系统(RIIL)日常管理手册()目录一、IT运维系统(RIIL)基本信息 (1)二、服务启动 (1)1、RIIL系统自带启停法 (1)2、windows服务启停法 (2)三、激活license (3)四、服务器修改 (5)1、端口号更改 (5)2、服务器密码更改 (6)五、资源添加 (7)1、单个资源添加 (7)2、自动拓扑添加 (9)3、新资源在拓扑中展示 (11)一、IT运维系统(RIIL)基本信息XXX运维系统RIIL安装在windows 2008 server 64位的系统上,目前实施的版本为RIIL6.7.5标准版。
数据采用了mysql 5.5版本,中间件采用了Jboss4版本。
RIIL服务器地址为:X.X.X.XRIIL服务器的账号为:administrator 密码为:XXXXXXX RIIL访问的方式为:http://X.X.X.X/portal/mainRIIL的账号为:admin 密码为:riiladmin目前网络设备采用SNMP方式、windows系统采用WMI/SNMP方式、linux系统采用SSH/TELNET的方式进行监控。
SNMP的团体字采用XXXX。
二、服务启停1、RIIL系统自带启停法:打开系统桌面RIIL文件夹或者开始菜单所有程序中的RIIL 文件夹,双击startup启动RIIL系统服务,shutdown停止RIIL 系统服务。
图2-1 菜单-程序图2-2 桌面2、windows服务启停方法:开始-运行中输入“services.msc”打开windows服务图2-3 运行RIIL相关服务右键启动/停止,启动服务依次为:RIIL_CCS、RIIL_DCS、RIIL_Portal_Server、RIIL_Discovery_Server、RIIL_RCS,停止服务依次为:RIIL_RCS、RIIL_Portal_Server、RIIL_CCS、RIIL_DCS、RIIL_Discovery_Server;图 2-4 RIIL服务三、激活licenseRIIL系统运维平台使用机器码注册方式进行授权,下面介绍下如何激活,及查看授权信息。

GETTING STARTED GUIDENI sbRIO-9607Single-Board RIO OEM DevicesThis document describes how to begin using the NI sbRIO-9607.Safety GuidelinesOperate the sbRIO-9607 only as described in the user documentation.Caution The sbRIO-9607 must be installed in a suitable enclosure prior to use.Caution NI makes no product safety, electromagnetic compatibility (EMC), or CEmarking compliance claims for the sbRIO-9607. The end-product supplier isresponsible for conformity to any and all compliance requirements.Caution Exercise caution when designing an enclosure for the sbRIO-9607.Auxiliary cooling may be necessary to keep the sbRIO-9607 within the specifiedoperating temperature range. Refer to the NI sbRIO-9607 Specifications on /manuals for more information about the maximum operating temperature rating. Forinformation and examples regarding factors that can affect thermal performance,visit /info and enter the Info Code sbriocooling.Caution Do not operate the sbRIO-9607 in a manner not specified in thisdocument. Product misuse can result in a hazard. You can compromise the safetyprotection built into the product if the product is damaged in any way. If the productis damaged, return it to NI for repair.Safety VoltagesConnect only voltages that are below these limits.V terminal to C terminal30 VDC maximum, Measurement Category I Measurement Category I is for measurements performed on circuits not directly connected to the electrical distribution system referred to as MAINS voltage. MAINS is a hazardous live electrical supply system that powers equipment. This category is for measurements of voltages from specially protected secondary circuits. Such voltage measurements include signal levels, special equipment, limited-energy parts of equipment, circuits powered by regulated low-voltage sources, and electronics.Caution Do not connect the sbRIO-9607 to signals or use for measurements withinMeasurement Categories II, III, or IV.Preparing the EnvironmentEnsure that the environment in which you are using the sbRIO-9607 meets the following specifications.-40 °C to 85 °CLocal ambient operating temperature neardevice (IEC 60068-2-1, IEC 60068-2-2)Maximum reported onboard sensor temperatureCPU/FPGA temperature98 °CPrimary System temperature85 °CSecondary System temperature85 °CNote Ensure that the local ambient, reported CPU/FPGA, and reported PrimarySystem temperatures do not exceed any of the maximum temperatures listed in thisdocument. For more information about how to access the onboard sensors, visit/info and enter the Info Code sbriosensors.Operating humidity (IEC 60068-2-78)10% RH to 90% RH, noncondensing Pollution Degree (IEC 60664)2Maximum altitude5,000 mIndoor use only.Note Refer to the device specifications on /manuals for completespecifications.2| | NI sbRIO-9607 Getting Started GuideUnpacking the KitCaution To prevent electrostatic discharge (ESD) from damaging the device,ground yourself using a grounding strap or by holding a grounded object, such as your computer chassis.1.Touch the antistatic package to a metal part of the computer chassis.2.Remove the device from the package and inspect the device for loose components or anyother sign of damage.CautionNever touch the exposed pins of connectors.Note Do not install a device if it appears damaged in any way.3.Unpack any other items and documentation from the kit.Store the device in the antistatic package when the device is not in use.Verifying the Kit ContentsVerify that the following items are included in the sbRIO-9607 kit.Figure 1.sbRIO-9607 Kit Contents1.sbRIO Device2.NI CompactRIO Device Drivers Media3.Getting Started Guide4.Power Supply5.10-pin IDC to 9-pin DSUB Cable6.Power Cable Assembly7.Standoffs and Screws8.NI 9694 Digital I/O Breakout RMC BoardNote The provided power supply is only intended for the getting startedexperience. NI recommends the use of a power supply that meets the specifications listed in the NI sbRIO-9607 Specifications for system deployment.NI sbRIO-9607 Getting Started Guide | © National Instruments | 3Installing Software on the Host ComputerBefore using the sbRIO-9607, you must install the following application software and device drivers on the host computer.bVIEW 2015 or laterbVIEW Real-Time Module 2015 or laterbVIEW FPGA Module 2015 or later4.NI CompactRIO Device Drivers August 2015 or laterFor minimum software support information, visit /info and enter the Info Code softwareversion.Connecting the sbRIO-9607The sbRIO-9607 has the following components.Figure 2. sbRIO-9607 Components1.J9, Power Connector2.Chassis Ground Bracket3.J10, USB Host Port4.W1, CAN (CAN0)5.J7, RJ-45 Ethernet Port6.W2, RS-232 (COM1)7.Reset Switch8.LEDs 9.Mounting Holes Connected to Chassis Ground10.Ethernet RGMII Transceiver11.ULPI USB T ransceiver12.FPGA Processor13.DDR Memory14.NAND Flash15.CPLD16.J1, RIO Mezzanine Card Connector4| | NI sbRIO-9607 Getting Started GuideConnecting the sbRIO-9607 to PowerThe NI sbRIO device requires a 9 VDC to 30 VDC external power supply. The NI sbRIO device filters and regulates the supplied power and provides power for RMCs.Note Refer to the Power Requirements section of the NI sbRIO-9607Specifications for the complete power requirement specifications.Note Refer to the Power Requirements section of the NI sbRIO-9607 User Manualfor formulas and examples for calculating power requirements for differentconfigurations and application types.Note Refer to the Power Requirements section of the NI sbRIO-9607 User Manualfor proper wiring of the power cable assembly.Complete the following steps to connect a power supply to the device.Caution Do not mate or unmate the power supply connectors while power isapplied.1.Ensure that your power supply is powered off.2.Insert the power connector plug into the power connector receptacle of the NI sbRIOdevice until the connector latches into place.3.Turn on the power supply.Powering On the NI sbRIO DeviceThe NI sbRIO device runs a power-on self test (POST) when you apply power to the device. During the POST, the Power and Status LEDs turn on. When the Status LED turns off, the POST is complete. If the LEDs do not behave in this way when the system powers on, refer to the STATUS LED Indicators section.Connecting the sbRIO-9607 to the Host Computer Complete the following steps to connect the sbRIO-9607 to the host computer using the RJ-45 Ethernet port.1.Power on the host computer.2.Connect the sbRIO-9607 to the host computer using a standard Category 5 (CAT-5) orbetter shielded, twisted-pair Ethernet cable.Caution To prevent data loss and to maintain the integrity of your Ethernetinstallation, do not use a cable longer than 100 m.The first time you power up the device, it attempts to initiate a DHCP networkconnection. If the device is unable to initiate a DHCP connection, it connects to thenetwork with a link-local IP address with the form 169.254.x.x. After the device hasNI sbRIO-9607 Getting Started Guide| © National Instruments| 5powered up, you must install software on the device and configure the network settings in MAX.Note Installing software may change the network behavior of the device. Forinformation about network behavior by installed software version, visit /info and enter the Info Code ipconfigcrio.Configuring the System in Measurement & Automation Explorer (MAX)Complete the following steps to find the system in MAX.unch MAX on the host computer.2.Expand Remote Systems in the configuration tree and locate your system.3.Tip MAX lists the system under the model number followed by the serialnumber, such as NI-sbRIO-9607-########.Complete the following steps to set a system password.Note The default username for the sbRIO-9607 is admin. There is no defaultpassword for the sbRIO-9607, so you must leave the password field blank whenlogging in until you set a system password.1.Right-click your system and select Web Configuration.The NI Web-Based Configuration and Monitoring utility opens in your default browser and is where you set the password. If you have not installed Microsoft Silverlight,NI Web-based Configuration & Monitoring prompts you to do so.2.Enter a unique name for your system in the Hostname field.3.Click the Security Configuration icon.4.Click Login.5.In the Login dialog box, enter the username admin and leave the password field blank.6.Click OK.7.Click Change Password.8.Enter and re-enter a new password.9.Click OK.10.Click Save.11.Click OK to confirm you are changing the password.Caution NI cannot recover lost system passwords. If you forget the password,you must contact NI and reformat the controller.6| | NI sbRIO-9607 Getting Started GuideInstalling Software on the sbRIO-9607Complete the following steps to install software on the sbRIO-9607.1.In MAX, expand your system under Remote Systems.2.Right-click Software.3.Add/Remove Software to launch the LabVIEW Real-Time Software Wizard.Tip You must log in if you set a system password.4.5.Click Next.6.Select NI Scan Engine from the software add-ons.Select any additional software to install. If you plan on using the sbRIO-9607 with theNext.Tip You can use this wizard at anytime to install additional software.7.Next.8.9.Click Next to start the installation.10.Click Finish when the installation is complete.Troubleshooting the sbRIO-9607The sbRIO-9607 is Not Communicating with the Network•Ensure that the Ethernet connections between the sbRIO-9607 and the host computer and the Ethernet connections between the host computer and the router are secure.•Ensure that you have the correct version of NI CompactRIO Device Drivers installed on the host computer. Visit /info and enter the Info Code softwareversion for theTip If you have recently upgraded LabVIEW, you must reinstall NICompactRIO Device Drivers.•e a standard Category 5 (CAT-5) or better shielded, twisted-pair Ethernet cable toconnect the sbRIO-9607 Ethernet port to a host computer. The sbRIO-9607 attempts to initiate a DHCP network connection at powerup.NI sbRIO-9607 Getting Started Guide| © National Instruments| 72.In MAX, expand your system under Remote Systems and select Troubleshoot RemoteSystem Discovery.System ResetThe following figure shows the reset behavior of the sbRIO-9607.Figure 3. Reset Button BehaviorPress and holdPress and holdRESET button for ≥ 5 sSTA TUS LED IndicatorsThe following table lists the STATUS LED indicators.8| | NI sbRIO-9607 Getting Started GuideTable 1. ST ATUS LED IndicatorsNI sbRIO-9607 Getting Started Guide| © National Instruments| 9Where to Go NextWorldwide Support and ServicesThe National Instruments website is your complete resource for technical support. At / support, you have access to everything from troubleshooting and application development self-help resources to email and phone assistance from NI Application Engineers.Visit /services for NI Factory Installation Services, repairs, extended warranty, and other services.Visit /register to register your National Instruments product. Product registration facilitates technical support and ensures that you receive important information updates from NI.National Instruments corporate headquarters is located at 11500 North Mopac Expressway, Austin, Texas, 78759-3504. National Instruments also has offices located around the world. For telephone support in the United States, create your service request at /support or 10| | NI sbRIO-9607 Getting Started Guidedial 1 866 ASK MYNI (275 6964). For telephone support outside the United States, visit the Worldwide Offices section of /niglobal to access the branch office websites, which provide up-to-date contact information, support phone numbers, email addresses, and current events.NI sbRIO-9607 Getting Started Guide| © National Instruments| 11Refer to the NI Trademarks and Logo Guidelines at /trademarks for information on National Instruments trademarks. Other product and company names mentioned herein are trademarks or trade names of their respective companies. For patents covering National Instruments products/technology, refer to the appropriate location: Help»Patents in your software, the patents.txt file on your media, or the National Instruments Patent Notice at /patents. Y ou can find information about end-user license agreements (EULAs) and third-party legal notices in the readme file for your NI product. Refer to the ExportCompliance Information at /legal/export-compliance for the National Instruments global trade compliance policy and how to obtain relevant HTS codes, ECCNs, and other import/export data. NI MAKES NO EXPRESS OR IMPLIED WARRANTIES AS TO THE ACCURACY OF THE INFORMA TION CONT AINED HEREIN AND SHALL NOT BE LIABLE FOR ANY ERRORS. U.S. Government Customers: The data contained in this manual was developed at private expense and is subject to the applicable limited rights and restricted data rights as set forth in FAR 52.227-14, DFAR 252.227-7014, and DFAR 252.227-7015.© 2014—2015 National Instruments. All rights reserved.376414A-01Aug15。

Tina Linux系统软件开发指南版本号:1.5发布日期:2021.04.17版本号日期制/修订人内容描述0.12019.02.20AWA1225创建1.02019.02.27AWA1225正式发布1.12019.06.16AWA1046补充软件包安装,烧录工具及分区说明1.22019.06.19AWA1046更新文档说明和目录结构说明,补充细节1.32020.12.31AWA1610增加arisc代码编译描述1.42021.02.06AWA1610arisc代码编译策略变更1.52021.04.17AWA0985完善部分章节描述1概述11.1编写目的 (1)1.2适用范围 (1)1.3相关人员 (1)2Tina系统资料22.1概述 (2)2.2文档列表 (2)3Tina系统概述33.1概述 (3)3.2系统框图 (3)3.3开发流程 (4)4Tina开发环境64.1概述 (6)4.2编译环境搭建 (6)4.2.1开发主机配置 (6)4.2.2软件包配置 (6)5Tina系统获取85.1概述 (8)5.2SDK获取 (8)5.3SDK结构 (8)5.3.1build目录 (8)5.3.2config目录 (9)5.3.3devices目录 (9)5.3.4docs目录 (10)5.3.5lichee目录 (10)5.3.6package目录 (10)5.3.7prebuilt目录 (11)5.3.8scripts目录 (11)5.3.9target目录 (11)5.3.10toolchain目录 (12)5.3.11tools目录 (12)5.3.12out目录 (12)5.4SDK更新 (13)5.5问题反馈 (13)6Tina编译打包156.1概述 (15)6.2编译系统 (15)6.3编译boot (15)6.4编译内核 (15)6.5编译arisc (16)6.6重编应用 (17)6.6.1方法一 (17)6.6.2方法二 (17)6.7其他命令 (18)7Tina系统烧写197.1概述 (19)7.2烧录工具 (19)7.3进入烧录模式 (19)8Tina uboot定制开发218.1概述 (21)8.2代码路径 (21)8.3uboot功能 (21)8.4uboot配置 (22)8.4.1defconfig方式 (22)8.4.1.1defconfig配置步骤 (22)8.4.1.2defconfig配置宏介绍 (22)8.4.2menuconfig方式 (23)8.5uboot编译 (24)8.5.1方法一 (24)8.5.2方法二 (25)8.6uboot的配置 (25)8.6.1sys_config配置 (25)8.6.1.1sys_config.fex结构介绍 (25)8.6.1.2sys_config.fex配置实例 (25)8.6.1.3sys_config.fex解析流程 (26)8.6.2环境变量配置 (26)8.6.2.1环境变量作用 (27)8.6.2.2环境变量配置示例介绍 (27)8.6.3sys_partition.fex分区配置 (28)8.6.3.1sys_partition.fex分区配置介绍 (28)9Tina kernel定制开发299.1概述 (29)9.2代码路径 (29)9.3模块开发文档 (29)9.4内核配置 (29)10Tina系统定制开发3110.1应用移植 (31)10.1.1Makefile范例 (31)10.1.2自启动设置 (33)10.1.2.1调用自启动脚本 (33)10.1.2.2sysV格式脚本 (33)10.1.2.3procd格式脚本 (34)10.2应用调试 (35)10.3应用编译 (36)10.4应用安装 (36)10.5分区与挂载 (37)3-1Tina Linux系统框图 (3)3-2Tina Linux系统开发流程 (4)8-1defconfig配置图 (22)8-2defconfig基本宏定义介绍图 (23)8-3menuconfig配置菜单图 (24)8-4sysconfig.fex基本结构图 (25)8-5platform配置图 (26)8-6target配置图 (26)8-7uart_para配置图 (26)8-8uboot启动调用环境变量方式图 (27)8-9kernel cmdline图 (28)9-1TinaLinux内核配置菜单 (30)10-1应用配置主界面 (35)10-2软件包所在界面 (36)1.1编写目的本文档作为Allwinner Tina Linux系统平台开发指南,旨在帮助软件开发工程师、技术支持工程师快速上手,熟悉Tina Linux系统的开发及调试流程。

LSP2.00DaVinci Linux IPIPE Driver User's GuideLiterature Number:SPRUG93September20082SPRUG93–September2008Submit Documentation Feedback1Architecture Overview (5)2Application Level APIs (6)3IPIPE Driver IOCTLS (9)4Usage Examples (10)4.1Driver Open and Close (10)4.2Buffer Allocation and Mapping (10)4.3Set Up IPIPE Parameters (11)4.4Perform the IPIPE Operation (11)4.5Enable RSZ0for Resize Operation (11)4.6Enable RSZ1for Resize Operation (12)4.7Slicing of an Image (12)5Resizer Performance Calculation (13)5.1Resizer Performance Limit Equation (13)5.2Calculating PPLN for Resizing of88x60to704x480 (14)SPRUG93–September2008Table of Contents3 Submit Documentation FeedbackList of Figures1System Diagram (5)List of Figures4SPRUG93–September2008Submit Documentation FeedbackUser's GuideSPRUG93–September2008This guide introduces the DaVinci Linux IPIPE Driver by providing a brief overview of the driver and specifics concerning its use within a hardware/software environment.For LSP2.00,the IPIPE Driver is supported on the following EVMs:DM355.1Architecture OverviewThe IPIPE Driver is contained in the following files:•dm350_ipipe.c•dm350_ipipe_hw.c•dm350_ipipe.h•dm350_ipipe_hw.hFigure1shows how the IPIPE Driver fits into the system architecture.Figure1.System DiagramSPRUG93–September2008LSP2.00DaVinci Linux IPIPE Driver5 Submit Documentation Feedback2Application Level APIsApplication Level APIs The IPIPE Driver is sub-divided into the following vertical modules:•InitializationThis module handles all the initialization activities including driver registration,driver un-registration,configuration creation,and configuration deletion.•Configuration and ControlThis module handles input,previewing,and resizing functionality of the driver.•Interrupt HandlingThis is the interrupt handler for the IPIPE Driver.It handles interrupts generated by the IPIPE hardware for MMR modification interrupt (IPIPE_INT1_SDR ).•Buffer ManagementThis module handles all buffer management activities including buffer creation,maintaining open buffers,and mapping/un-mapping of physical buffer to/from the applications memory area.The IPIPE Driver is divided into two horizontal layers:•Functional LayerThis layer implements all the functionalities and the application interface.•HW Configuration LayerThis layer contains functions to configure the hardware.These functions are used by the functional layer for configuration and control.The following Linux driver APIs are supported by the IPIPE Driver •open()•close()•mmap()•munmap()•ioctl()LSP 2.00DaVinci Linux IPIPE Driver6SPRUG93–September 2008Submit Documentation Feedback Application Level APIs OPENPrototype int open(const char*pathname,int flags);Description Opens the IPIPE.Multiple opens are not supported by the IPIPE Driver.Argumentspathname The location of the device file.The value normally is/dev/dm350_ipipe;flags=O_RDWR.flags Only O_RDWR is supported.Return Value A new file descriptor or-1,if an error occurs.CLOSEPrototype int close(int fd);Description Closes the IPIPE.Argumentsfd File descriptor returned by open().Return Value Zero,on success,or-1,if an error occurred.MMAPPrototype int mmap(void*start,size_t length,int prot,int flags,int fd,off_t offset); Description Maps the frame buffers allocated by the IPIPE Driver in kernel space to user space. Argumentsstart Usually0.length Size of the memory to be mapped.prot Only PROT_READ|PROT_WRITE is supported.flags Only MAP_SHARED is supported.fd File descriptor returned by open().offset The kernel address of the physical memory to be mapped;for moreinformation,see Section3.Return Value Pointer to the mapped area,on success,or MAP_FAILED(-1),if an error occurred. SPRUG93–September2008LSP2.00DaVinci Linux IPIPE Driver7 Submit Documentation FeedbackApplication Level APIs MUNMAPPrototype int munmap(void*start,size_t length);Description Unmaps the frame buffers that were previously mapped to user space using mmap(). Argumentsstart The user space virtual address of the memory block to be ummaped.length Size of the memory to be unmapped.Return Value Pointer to the mapped area,on success,or MAP_FAILED(-1),if an error occurred. IOCTLPrototype int ioctl(int fd,int request,void*argp);Description Used to program the IPIPE.The argument fd must be an open-file descriptor.An ioctl request has encoded in it whether the argument is an input,output,or read/writeparameter,and the size of the argument argp,in bytes.Macros and defines specifyingIPIPE ioctl requests are located in the dm350_ipipe.h header file.Applications shoulduse their own copy and not include the version in the kernel sources on the systemwhere they compile.All IPIPE ioctl requests and their respective functions andparameters are specified in Section3.Argumentsfd File descriptor returned by open().request IPIPE ioctl request code as defined in the dm350_ipipe.h header file,forexample IPIPE_SET_PARAM.argp Pointer to a function parameter,usually a structure.Return Value Zero,on success,or-1,if an error occurred.8LSP2.00DaVinci Linux IPIPE Driver SPRUG93–September2008Submit Documentation Feedback IPIPE Driver IOCTLS 3IPIPE Driver IOCTLSioctl IPIPE_REQBUFPrototype int ioctl(int fd,int request,struct ipipe_reqbufs*argp);Description Used to request frame buffers to be allocated by the IPIPE Driver.The allocated buffers can be addressed by indexing;i.e.,0,1,up to N-1.The ipipe_reqbufs structure and its fields are defined in dm350_ipipe.h. Argumentsfd File descriptor returned by open().request IPIPE_REQBUFargp Pointer to the ipipe_reqbufs structure.Return Value0,on success,or-1,on error,and the errno variable is set appropriately.ioctl IPIPE_QUERYBUFPrototype int ioctl(int fd,int request,struct ipipe_buffer*argp);Description Used to query the status of a particular frame buffer.The definition of the ipipe_buffer structure is in the dm350_ipipe.h header file. Argumentsfd File descriptor returned by open().request IPIPE_QUERYBUFargp Pointer to the ipipe_buffer structure.Return Value0,on success,or-1,on error,and the errno variable is set appropriately.ioctl IPIPE_SET_PARAMPrototype int ioctl(int fd,int request,struct ipipe_params*argp);Description Used to set the parameters(either default or user configurable)of the IPIPE hardware.If the argument passed is NULL,the driver sets the default parameters,including input andoutput image size,input source,output pixel format,RGB to RGB blending coefficients,etc.The application is responsible for specifying all these parameters.The driver setsthese parameters in the appropriate registers.The ipipe_params and its fields as defined in the dm350_ipipe.h header file. Argumentsfd File descriptor returned by open().request IPIPE_SET_PARAMargp Pointer to the ipipe_params structure.Return Value0,on success,or-1,on error,and the errno variable is set appropriately.SPRUG93–September2008LSP2.00DaVinci Linux IPIPE Driver9 Submit Documentation Feedback4Usage Examples4.1Driver Open and Close4.2Buffer Allocation and MappingUsage Examples ioctl IPIPE_GET_PARAMSynopsis int ioctl(int fd,int request,struct ipipe_params *argp);Description Used to get the IPIPE hardware settings.If it is called after SET_PARAM (with the argument as NULL),it gets the default parameters.Argumentsfd File descriptor returned by open().request IPIPE_GET_PARAMSargpPointer to the ipipe_params structure.Return Value 0,on success,or -1,on error,and the errno variable is set appropriately.ioctl IPIPE_STARTPrototype int ioctl(int fd,int request,struct ipipe_convert *argp);DescriptionSubmits an IPIPE processing task specified by the ipipe_convert structure to the hardware.The call is blocked until the task is complete.The ipipe_convert structure is defined in the dm350_ipipe.h header file.Argumentsfd File descriptor returned by open().request IPIPE_STARTargpPointer to the ipipe_convert structure.Return Value0,on success,or -1,on error,and the errno variable is set appropriately.This section provides some code examples showing how to use the IPIPE Driver./*open the ipipe*/int fd;fd =open(“/dev/dm350_ipipe,O_RDWR);if(fd ==-1){printf(“open IPIPE failed.\n”)exit(-1);}/*close the ipipe*/close(fd);struct ipipe_reqbufs,req_inbufs,req_outbufs;struct ipipe_buffer bufd;void *inBufs[N_INBUFS];void *outBufs[N_OUTBUFS];int i;/*request input buffers to be allocated */req_inbufs.buf_type =IPIPE_BUF_IN;req_inbufs.size =720*240*2;req_inbufs.count =N_INBUFS;if(ioctl(fd,IPIPE_REQBUF,&req_inbufs)==-1){printf(“buffer allocation error.\n”);10LSP 2.00DaVinci Linux IPIPE DriverSPRUG93–September 2008Submit Documentation Feedback Usage Examples exit(-1);}/*request output buffers to be allocated*/req_outbufs.buf_type=IPIPE_BUF_OUT;req_outbufs.size=352*288*2;req_outbufs.count=N_OUTBUFS;if(ioctl(fd,IPIPE_REQBUF,&req_outbufs)==-1){printf(“buffer allocation error.\n”);exit(-1);}/*map the input buffers to user space*/bufd.buf_type=IPIPE_BUF_IN;for(i=0;i<N_INBUFS;i++){bufd.index=i;ioctl(fd,IPPIE_QUERYBUF,&bufd)inbufs[i]=mmap(0,720*480*2,PROT_READ,MAP_SHARE,fd,bufd.offset);}/*map the output buffers to user space*/bufd.buf_type=IPIPE_BUF_OUT;for(i=0;i<N_OUTBUFS;i++){bufd.index=i;ioctl(fd,IPIPE_QUERYBUF,&bufd)outbufs[i]=mmap(0,352*288*2,PROT_READ,MAP_SHARE,fd,bufd.offset);}4.3Set Up IPIPE Parameters/*setup the default parameter here*/ioctl(fd,IPIPE_SET_PARAM,NULL);/*get the default parameters from kernel*/ioctl(fd,IPIPE_GET_PARAM,g_param);/*set parameters according to the required configuration*/g_param->ipipeif_param.pack_mode=EIGHT_BIT;g_param->ipipeif_param.hnum=I_WIDTH;g_param->ipipeif_param.vnum=I_HEIGHT;g_param->ipipeif_param.adofs=I_WIDTH;g_param->ipipe_vsz=I_HEIGHT-1;g_param->ipipe_hsz=I_WIDTH-1;:::/*configure the ipipe*/ioctl(fd,IPIPE_SET_PARAM,&g_param);4.4Perform the IPIPE Operationstruct ipipe_convert conv;conv.in_buff.index=conv.out_buff.index=-1;/*Set buffer index to-1*/conv.in_buff.size=720*240*2;/*Size of user provided input buffer*/conv.out_buff.size=352*288*2;/*Size of user provided output buffer*/conv.in_buf.offset=inbufs[0];/*physical address of the buffer or a user pointer*/conv.out_buf.offset=outbufs[0];/*perform the ipipe operation*/ioctl(fd,IPIPE_START,&conv);4.5Enable RSZ0for Resize Operation/*setup the default parameter here*/ioctl(fd,IPIPE_SET_PARAM,NULL);/*get the default parameters from kernel*/ioctl(fd,IPIPE_GET_PARAM,g_param);/*set parameters according to the required configuration*/g_param->ipipeif_param.pack_mode=EIGHT_BIT;g_param->ipipeif_param.hnum=I_WIDTH;g_param->ipipeif_param.vnum=I_HEIGHT;g_param->ipipeif_param.adofs=I_WIDTH;Usage Examples g_param->ipipe_vsz=I_HEIGHT-1;g_param->ipipe_hsz=I_WIDTH-1;:::g_param->rsz_en[0]=ENABLEg_param->rsz_en[1]=DISABLE/*configure the ipipe*/ioctl(fd,IPIPE_SET_PARAM,&g_param);4.6Enable RSZ1for Resize Operation/*setup the default parameter here*/ioctl(fd,IPIPE_SET_PARAM,NULL);/*get the default parameters from kernel*/ioctl(fd,IPIPE_GET_PARAM,g_param);/*set parameters according to the required configuration*/g_param->ipipeif_param.pack_mode=EIGHT_BIT;g_param->ipipeif_param.hnum=I_WIDTH;g_param->ipipeif_param.vnum=I_HEIGHT;g_param->ipipeif_param.adofs=I_WIDTH;g_param->ipipe_vsz=I_HEIGHT-1;g_param->ipipe_hsz=I_WIDTH-1;:::g_param->rsz_en[0]=ENABLEg_param->rsz_en[1]=DISABLE/*configure the ipipe*/ioctl(fd,IPIPE_SET_PARAM,&g_param);4.7Slicing of an ImageThis use case is for slicing the image of horizontal size“x”.Suppose x has to be sliced to sizes“a”,”b”, and“c”.So x=a+b+c/*for slice1*//*setup the default parameter here*/ioctl(fd,IPIPE_SET_PARAM,NULL);/*get the default parameters from kernel*/ioctl(fd,IPIPE_GET_PARAM,g_param);/*set parameters according to the required configuration*/g_param->ipipeif_param.pack_mode=SIXTEEN_BIT;g_param->ipipeif_param.hnum=x;g_param->ipipeif_param.vnum=I_HEIGHT;g_param->ipipeif_param.adofs=x*2;g_param->ipipe_vsz=I_HEIGHT;g_param->ipipe_hsz=a-1;:::g_param->rsz_rsc_param[0].rsz_o_hsz=a-1;g_param->ext_mem_param[0].rsz_sdr_oft=a*2;g_param->rsz_en[0]=ENABLEg_param->rsz_en[1]=DISABLE/*configure the ipipe*/ioctl(fd,IPIPE_SET_PARAM,&g_param);/*for slice2*//*setup the default parameter here*/ioctl(fd,IPIPE_SET_PARAM,NULL);/*get the default parameters from kernel*/ioctl(fd,IPIPE_GET_PARAM,g_param);/*set parameters according to the required configuration*/g_param->ipipeif_param.pack_mode=SIXTEEN_BIT;g_param->ipipeif_param.hnum=x;g_param->ipipeif_param.vnum=I_HEIGHT;g_param->ipipeif_param.adofs=x*2;12LSP2.00DaVinci Linux IPIPE Driver SPRUG93–September20085Resizer Performance Calculation 5.1Resizer Performance Limit Equationh0—-0-0 0min(1,-0)+=horizontal size of image output output start position of imagehhorizontal resize ratio of imageh1—-1-1 1min(1,-1)+=horizontal size of image output output start position of imagehhorizontal resize ratio of image Resizer Performance Calculation g_param->ipipe_vsz=I_HEIGHT;g_param->ipipe_hsz=b-1;:::g_param->rsz_rsc_param[0].rsz_o_hsz=b-1;g_param->ext_mem_param[0].rsz_sdr_oft=b*2;g_param->rsz_en[0]=ENABLEg_param->rsz_en[1]=DISABLE/*configure the ipipe*/ioctl(fd,IPIPE_SET_PARAM,&g_param);/*for slice3*//*setup the default parameter here*/ioctl(fd,IPIPE_SET_PARAM,NULL);/*get the default parameters from kernel*/ioctl(fd,IPIPE_GET_PARAM,g_param);/*set parameters according to the required configuration*/g_param->ipipeif_param.pack_mode=SIXTEEN_BIT;g_param->ipipeif_param.hnum=x;g_param->ipipeif_param.vnum=I_HEIGHT;g_param->ipipeif_param.adofs=x*2;g_param->ipipe_vsz=I_HEIGHT;g_param->ipipe_hsz=c-1;:::g_param->rsz_rsc_param[0].rsz_o_hsz=c-1;g_param->ext_mem_param[0].rsz_sdr_oft=c*2;g_param->rsz_en[0]=ENABLEg_param->rsz_en[1]=DISABLE/*configure the ipipe*/ioctl(fd,IPIPE_SET_PARAM,&g_param);The IPIPE has a resizer module consisting of two resizers(resizer-0and resizer-1)and is capable ofre-scaling images into various sizes ranging from x1/16scale down to x8scale-up in both horizontal and vertical directions.After the resizing process,the processed data is transferred to the SDRAM.Thissection describes how to fine tune some of the resizer parameters to achieve the desired scaleperformance.In this section,a typical scenario of scaling up a88x60image by8x in the horizontal and vertical direction is considered to understand what are all the parameters that are to be fine tuned at the driver level to achieve this performance for one resizer.This serves as a template for calculating thevalues of these parameters for the desired scenario.The VPFE user guide provides an equation for calculating the resizer performance limit.Listed below are the terms used in this equation:Pixel per line of input(PPLN)—This is the number of pixel clock per horizontal line of IPIPE input.VPSSCLK frequency(vpssclk)—When SDRAM is used as input for the IPIPE resizer,the pixel clock is derived by the IPIPE interface from the VPSSCLK.The CLOCKDIV field of the IPIPE interfaceconfiguration register(CFG)is used to divide this clock down to the desired value which forms thepixel clock(PCLK).where image-0refers to resizer-0output image.()ln /00011/ppln lockdiv >00011´>´+´+=Þ´´+´+pp vpssclk pclk h r h r where vpssclk pclk clockdiv c h r h r ()0ln 1.450011Þ´+´+´>´h r h r pp clockdiv 5.2Calculating PPLN for Resizing of 88x60to 704x480108=PCLK CLOCKDIV MHz.For clockdiv =6,108186==PCLK MHzMHz.()01.450011´+´+´h r h r -0-070407047040min(1,-0)min(1,8)1++====horizontal size of image output output start position of image h horizontal resize ratio of image r ((-0)/2)(8/2)40===ceil vertical resize ratio of image ceil (),100100440001=´+=´=Overhead o r r ()()()1.4570444004664´´+=rounded 4664466467776>>>PPLN for CLOCKDIV of should be CLOCKDIV 777703.02sec181000000´´==´PPLN LPFR m PCLK Resizer Performance Calculation where image-1refers to resizer-1output image.r 0—r 0=ceil((vertical resize ratio of image-0)/2)r 1—r 1=ceil((vertical resize ratio of image-1)/2)overhead (o)—o =100x (r 0+r 1)The vertical resize ratio for image-0and image-1should satisfy the following equation:Actual performance of the resize output is also limited by the bandwidth of the attached SDRAM and usage of this bandwidth by other entities in the system.With the Linux kernel running,this additional overhead is measured to be about 1.45times the value of h 0x r 0+h 1x r 1+o calculated above.The following parameters are required to be adjusted for getting the desired resizer performance.In this example,the parameter values required to obtain 8x horizontal and vertical zoom are calculated.The following fields in the ipipeif structure are involved in the performance calculation:struct ipipeif {ipipeif_clkdiv clk_div;/*clock divisor*/unsigned int glob_hor_size;/*global frame horizontal size*/unsigned int glob_ver_size;/*global frame vertical size*/};where clk_div is the CLOCKDIV field of the IPIPE interface configuration register (CFG),glob_hor_size is the PPLN,and glob_ver_size is the Lines Per Frame (LPFR)register values.The values configured for these must satisfy the equations detailed in Section 5.1.For this example,the input image size is 88x60and output image size is 704x 480.This requires a scale factor of 8x in both the horizontal and vertical direction.The VPFE uses a VPSSCLK of 108Mhz and thusIn this example,it is assumed that the output image start position is 0and only one resizer is used.The LPFR is set to the number of lines in the input image plus +10(as per VPFE user guide)=60+10=70.Since you are not using resizer-1,h 1=0,r 1=0So use a PPLN value of 778,CLOCKDIV value of 6to get 8x zoom in the horizontal and vertical direction.With these values the following calculation can be used to obtain the expected IPIPE processing time at the hardware.Expected processing time is14LSP 2.00DaVinci Linux IPIPE DriverSPRUG93–September 2008 Resizer Performance Calculation The IPIPE Driver is instrumented to measure the processing time at the hardware for doing IPIPE for the above scenario and the measured values are given in the table below for10frames.The time ismeasured just before enabling IPIPE processing and in the ISR after the frame is written to SDRAM.F1F2F3F4F5F6F7F8F9F10 ipipe start(usecs)862888896150929520962894996272296286299096384129728163101 ipipe_stop(usecs)865821899052932425965794999172325326588999281132631165999 IPIPE processing2933290229052900290029042899289729032898 time(usecs)measured average 2.9041processing time–msecThe Application is instrumented to measure the processing time at the Kernel for the IPIPE_START ioctl call(Time measured just before and after the IOCTL call)and the values are given in the table below for 10frames.F1F2F3F4F5F6F7F8F9F10 ipipe start(usecs)392234425530458882492267525621559000592353625714659088692461 ipipe_stop(usecs)396008429284462655496033529402562781596128629478662868696215 IPIPE processing3774375437733766378137813775376437803754 time(usecs)measured average 3.777processing time–msecThese measurements are done with the Kernel in the RT Pre-emption mode.。

RIL/QMI/Linux Data Start Guide1简介本文档为RIL/QMI/Linux Data入门介绍文档,目的是指导RIL新同事学习的内容和顺序,加快学习速度,尽快掌握相关知识。
RIL/QMI/Linux Data涉及的内容比较多,要掌握这些模块需要学习如下内容:AP侧:掌握Android Framework Telephony、RILD、QMI、DSS、NETMGR等AMSS侧:了解CM、WMS、UIM、PBM、STK、MMGSDI等模块的接口和典型消息流程,Data Service相关模块和Call Flow相关协议:了解GSM、WCDMA、CDMA相关协议,例如MO、MT信令流程,SIM 卡相关协议等。
由于内容太多,我们需要循序渐进,可以按照下面的顺序学习,具体每个模块相关资料和代码列在后面●RILD/RIL-LIB/Reference-RIL●Framework RIL JAVA●QCRIL框架,CM、WMS、UIM模块典型的业务流程(例如MO CALL、MTCALL、MO SMS、MT SMS、开机流程等),可以同时参考AMSS侧相关模块的介绍、接口文档、典型Case的Call Flow,不需要深入学习AMSS侧相关模块代码,两边结合更容易理解业务流程●QMI架构介绍●QCRIL DATA●NET MGR●QMI MUX、QMI CTRL、QMI Service Linux侧代码●DSS●Framework Data Call相关代码注:RILD/RIL-LIB/Framework这三部分为Android平台代码,如果以前做过其它平台则可以直接跳过去;其他部分为Qualcomm平台独有部分。
2Android RIL2.1文档Android RIL部分网上有很多资料可供参考,如果以前没有接触过RIL可以先看一些介绍RIL架构的文档,先了解Android中Telephony整体架构,Telephony的层次架构、模块,每个模块的功能,重点先放在Rild和QCRIL上,掌握之后再去看Framework层的RIL JAVA和GSMPhone或者CDMAPhone。

文档名称: RIL/QCRIL 架构介绍文档描述:介绍 Android RIL、qcril架构及主要功能实现,以及 RAT/VOICE/DATA相关业务在 RIL侧的处理流程目录1引言 (3)1.1目的 (3)1.2定义 (3)1.3相关协议及文档 (3)2RIL 架构 (4)3Android RIL简介 (5)3.1Android RIL 目录结构 (5)3.2Rild启动流程 (5)3.2.1加载ril动态库文件 (5)3.2.2启动event队列监听 (6)3.2.3执行动态库中ril_init (8)3.2.4Ril_register处理 (9)3.3rild event的处理 (9)3.3.1rild msg的解析 (9)3.3.2消息发送到QCRIL (11)4Qcril 简介 (12)4.1event thread 实现 (13)4.2qmi client 初始化 (15)4.3Oem socket server实现(保留,未修改) (16)4.4qcril主要函数 (17)4.5RIL 基本处理流程 (18)4.5.1AP下发的request的基本处理流程 (18)QCRIL时序图.pdf (18)4.5.2Modem主动上报消息基本处理流程 (18)5RIL侧部分业务 (19)5.1RAT业务 (19)5.1.1代码结构 (19)5.1.2开机搜网流程 (19)5.1.3V oice 相关处理流程 (19)5.1.4补充业务 (20)5.2DATA相关处理流程(保留,未修改) (20)5.2.1代码存储位置 (20)DATA相关代码存储目录:/vendor/qcom/proprietary/qcril/common/data。
这里仅是部分代码,还有大部分在/vendor/qcom/proprietary/data/。
(20)5.2.2发送DataCall请求流程(ril,qcril侧) (21)5.2.3DataCall设置成功响应流程 (23)5.3UIM相关业务(保留,未修改) (25)5.3.1代码结构 (25)5.3.2UIM相关的处理流程 (26)5.3.3STK相关的处理 (29)5.4附录1:qcril init流程图 (31)1引言在Android平台中,RIL层位于Framework层与modem之间,分成两个部分:一部分是rild,它创建socket服务与framework层进行通信;一部分是Vendor RIL,在高通平台中称为qcril。

LifeKeeper for Linux 6.0安装使用手册一.安装前准备在安装LifeKeeper之前,请参阅LifeKeper for Linux 6.1发布说明,确定LifeKeeper支持您所使用的操作系统和硬件配置。
在使用多路径管理(如 IBM SDD、Hitachi HDLM、EMC PowerPath等)和LVM的系统环境中,需要安装相应的Recover Kit。
主机名确定服务器的主机名,在安装LifeKeeper后不变。
网络规划在每台服务器上需要至少安装两块网卡。
确定所保护的应用使用的浮动(虚拟)IP地址。
主机名 LINUX1 LINUX2 备注eth0地址 192.168.1.190 192.168.1.191 受保护应用使用的网段 eth1地址 10.10.0.190 10.10.0.191 使用交叉网线直连浮动IP地址 192.168.1.192 受保护应用使用的对外IP修改/etc/hosts文件,添加ip地址-主机名映射127.0.0.1 localhost //这行必须存在192.168.1.190LINUX1192.168.1.191LINUX2192.168.1.192LINUX //虚拟IP的主机名,可选加这行2.1安装LifeKeeper Installation Support挂载安装支持包光盘文件: mount <de.img绝对路径> <挂载点> -o loop运行 <挂载点>/setup文件,输入y开始安装支持包显示检测到的操作系统和内核版本,输入ENTER提示安装相应操作系统的LifeKeeper发布支持包,输入y提示安装JAVA运行环境,输入y提示安装IBM IPS Recover Kit,在使用IBM ServerRAID控制器时输入y,否则输入n(失败后手工强制安装) 提示安装CCISS Recover Kit,在使用HP磁盘阵列时输入y,否则输入n安装Data Replicaion支持提示安装NFS支持,在使用NFS时输入y,否则输入n提示检测ALL LUNs,输入n安装License工具包,输入ENTER提示安装license,输入y提示是否有包含license的本地文件,输入n粘帖license,成功后输入q退出steeleye-lklce_zh-09857-33801-44440-06415-15408-49152-28843-62460-59370-02471-10871-43359-107 19-54336-21337-55820-29198-56765-56608-51866-4052.2安装LifeKeeper for Linux Core运行 rpm -ivh <LifeKeeper Core路径>*.rpmsteeleye-lk-6.2.0-5.i386.rpm // LifeKeeper 核心程序steeleye-lkGUI-6.2.0-5.i386.rpm // LifeKeeper 图形程序steeleye-lkHLP-6.2.0-5.noarch.rpm // LifeKeeper 在线帮助手册steeleye-lkIP-6.2.0-5.noarch.rpm // IP Recover Kitsteeleye-lkMAN-6.2.0-5.noarch.rpm // LifeKeeper MANsteeleye-lkRAW-6.2.0-5.noarch.rpm // RAW 设备 Recover Kit2.3修改配置文件编辑 /etc/default/LifeKeeper 文件LKCHECKINTERVAL=120 // LifeKeeper对资源的检测时间间隔,默认是120秒,可将其缩短,改为40秒对于LifeKeeper 中文版,需要在/etc/default/LifeKeeper中设置变量LANG=zh_CN.UTF-8LC_ALL=zh_CN; export LC_ALL3.1 连接LifeKeeper管理界面3.1.1启动LifeKeeper服务首先启动LifeKeeper核心服务: /opt/LifeKeeper/bin/lkstart再启动LifeKeeper GUI服务: /opt/LifeKeeper/bin/lkGUIserver start这两个命令运行完成后,LifeKeeper会在服务器启动时自动启动。

Oracle Linux 7 Administrator's GuideE54669-79October 2022Oracle Linux 7 Administrator's Guide,E54669-79Copyright © 2022, Oracle and/or its affiliates.ContentsPrefaceConventions v Documentation Accessibility v Access to Oracle Support for Accessibility v Diversity and Inclusion vi1 System ConfigurationYum1-1 Ksplice1-1 Boot and Service Configuration1-2 System Configuration Settings1-2 Kernel Modules1-2 Device Management1-3 Task Management1-3 System Monitoring and Tuning1-3 System Dump Analysis1-32 Networking and Network ServicesNetwork Configuration2-1 Network Address Configuration2-1 Name Service Configuration2-2 Network Time Configuration2-2 Web Service Configuration2-2 Email Service Configuration2-2 High Availability Configuration2-3 Load Balancing Configuration2-3 VNC Service Configuration2-33 Storage and File SystemsStorage Management3-1File System Administration3-1 Local File System Administration3-2 Shared File System Administration3-2 Oracle Cluster File System Version 23-24 Authentication and SecurityAuthentication Configuration4-1 Local Account Configuration4-1 System Security Administration4-2 OpenSSH Configuration4-25 VirtualizationLinux Containers5-1 Using KVM With Oracle Linux5-1PrefaceOracle® Linux 7: Administrator's Guide provides introductory information about administeringvarious features of Oracle Linux 7 systems, including system configuration, networking,network services, storage devices, file systems, authentication, and security.ConventionsThe following text conventions are used in this document:Convention Meaningboldface Boldface type indicates graphical userinterface elements associated with an action,or terms defined in text or the glossary.italic Italic type indicates book titles, emphasis, orplaceholder variables for which you supplyparticular values.monospace Monospace type indicates commands within aparagraph, URLs, code in examples, text thatappears on the screen, or text that you enter. Documentation AccessibilityFor information about Oracle's commitment to accessibility, visit the Oracle AccessibilityProgram website at https:///corporate/accessibility/.For information about the accessibility of the Oracle Help Center, see the Oracle AccessibilityConformance Report at https:///corporate/accessibility/templates/t2-11535.html.Access to Oracle Support for AccessibilityOracle customers that have purchased support have access to electronic support through MyOracle Support. For information, visit https:///corporate/accessibility/learning-support.html#support-tab.PrefaceDiversity and InclusionOracle is fully committed to diversity and inclusion. Oracle respects and values havinga diverse workforce that increases thought leadership and innovation. As part of ourinitiative to build a more inclusive culture that positively impacts our employees,customers, and partners, we are working to remove insensitive terms from ourproducts and documentation. We are also mindful of the necessity to maintaincompatibility with our customers' existing technologies and the need to ensurecontinuity of service as Oracle's offerings and industry standards evolve. Because ofthese technical constraints, our effort to remove insensitive terms is ongoing and willtake time and external cooperation.1System ConfigurationThis section contains the following chapters:•Yum describes how you can use the yum utility to install and upgrade software packages.•Ksplice describes how to configure Ksplice Uptrack to update the kernel on a running system.•Boot and Service Configuration describes the Oracle Linux boot process, how to use the GRUB boot loader, how to change the run level of a system, and how to configure theservices that are available at each run level.•System Configuration Settings describes the files and virtual file systems that you can use to change configuration settings for your system.•Kernel Modules describes how to load, unload, and modify the behavior of kernelmodules.•Device Management describes how the system uses device files and how the udev device manager dynamically creates or removes device node files.•Task Management describes how to configure the system to run tasks automatically within a specific period of time, at a specified time and date, or when the system is lightlyloaded.•System Monitoring and Tuning describes how to collect diagnostic information about a system for Oracle Support, and how to monitor and tune the performance of a system.•System Dump Analysis describes how to configure a system to create a memory image in the event of a system crash, and how to use the crash debugger to analyse thememory image in a crash dump or for a live system.YumThis chapter describes how you can use the yum utility to install and upgrade softwarepackages.KspliceThis chapter provides a high-level overview of Oracle Ksplice.Chapter 1Boot and Service ConfigurationBoot and Service ConfigurationThis chapter describes the Oracle Linux boot process, how to use the GRUB 2bootloader, how to change the systemd target for a system, and how to configure theservices that are available for a target.System Configuration SettingsThis chapter describes the files and virtual file systems that you can use to changeconfiguration settings for your system.Kernel ModulesThis chapter describes how to load, unload, and modify the behavior of kernelmodules.Chapter 1Device ManagementDevice ManagementThis chapter describes how the system uses device files and how the udev device managerdynamically creates or removes device node files.Task ManagementThis chapter describes how to configure the system to run tasks automatically within aspecific period of time, at a specified time and date, or when the system is lightly loaded.System Monitoring and TuningThis chapter describes how to collect diagnostic information about a system for OracleSupport, and how to monitor and tune the performance of a system.System Dump AnalysisThis chapter describes how to configure a system to create a memory image in the event of asystem crash, and how to use the crash debugger to analyse the memory image in a crashdump or for a live system.2Networking and Network ServicesThis section contains the following chapters:•Network Configuration describes how to configure a system's network interfaces and network routing.•Network Address Configuration describes how to configure a DHCP server, DHCP client, and Network Address Translation.•Name Service Configuration describes how to use BIND to set up a DNS name server.•Network Time Configuration describes how to configure the chrony, Network TimeProtocol (NTP), or Precision Time Protocol (PTP) daemons for setting the system time.•Web Service Configuration describes how to configure a basic HTTP server.•Email Service Configuration describes email programs and protocols that are available with Oracle Linux, and how to set up a basic Sendmail client.•High Availability Configuration describes how to use Pacemaker and Corosync to set up high availability cluster configurations with networked systems.•Load Balancing Configuration describes how to use Keepalived and HAProxy to set up load balancing for networked systems.•VNC Service Configuration describes how to enable a VNC server to provide remote access to a graphical desktop.Network ConfigurationThis chapter describes how to configure a system's network interfaces and network routing.Network Address ConfigurationThis chapter describes how to configure a DHCP server, DHCP client, and Network AddressTranslation.Chapter 2Name Service ConfigurationName Service ConfigurationThis chapter describes how to use BIND to set up a DNS name server.Network Time ConfigurationThis chapter describes how to configure a system to use the chrony, Network TimeProtocol (NTP), or Precision Time Protocol (PTP) daemons for setting the system time.Web Service ConfigurationThis chapter describes how to configure a basic HTTP server.Email Service ConfigurationThis chapter describes email programs and protocols that are available with OracleLinux, and how to set up a basic Sendmail client.Chapter 2High Availability ConfigurationHigh Availability ConfigurationThis chapter describes how to configure the Pacemaker and Corosync technologies to createan HA cluster that delivers continuous access to services running across multiple nodes.Load Balancing ConfigurationThis chapter describes how to configure the Keepalived and HAProxy technologies forbalancing access to network services while maintaining continuous access to those services.VNC Service ConfigurationThis chapter describes how to enable a Virtual Network Computing (VNC) server to provideremote access to a graphical desktop.3Storage and File SystemsThis section contains the following chapters:•Storage Management describes how to configure and manage disk partitions, swap space, logical volumes, software RAID, block device encryption, iSCSI storage, andmultipathing.•File System Administration describes how to create, mount, check, and repair filesystems, how to configure Access Control Lists, how to configure and manage diskquotas.•Local File System Administration describes administration tasks for the btrfs, ext3, ext4, OCFS2, and XFS local file systems.•Shared File System Administration describes administration tasks for the NFS andSamba shared file systems, including how to configure NFS and Samba servers.•Oracle Cluster File System Version 2 describes how to configure and use the Oracle Cluster File System Version 2 (OCFS2) file system.Storage ManagementThis chapter describes how to configure and manage disk partitions, swap space, logicalvolumes, software RAID, block device encryption, iSCSI storage, and multipathing.File System AdministrationThis chapter describes how to create, mount, check, and repair file systems, how to configureAccess Control Lists, how to configure and manage disk quotas.Chapter 3Local File System AdministrationLocal File System AdministrationThis chapter describes administration tasks for the btrfs, ext3, ext4, OCFS2, and XFSlocal file systems.Shared File System AdministrationThis chapter describes administration tasks for the NFS and Samba shared filesystems.Oracle Cluster File System Version 2This chapter describes how to configure and use the Oracle Cluster File SystemVersion 2 (OCFS2) file system.4Authentication and SecurityThis section contains the following chapters:•Authentication Configuration describes how to configure various authentication methods that Oracle Linux can use, including NIS, LDAP, Kerberos, and Winbind, and how youcan configure the System Security Services Daemon feature to provide centralizedidentity and authentication management.•Local Account Configuration describes how to configure and manage local user and group accounts.•System Security Administration describes the subsystems that you can use to administer system security, including SELinux, the Netfilter firewall, TCP Wrappers, chroot jails,auditing, system logging, and process accounting.•OpenSSH Configuration describes how to configure OpenSSH to support securecommunication between networked systems.Authentication ConfigurationThis chapter describes how to configure various authentication methods that Oracle Linuxcan use, including NIS, LDAP, Kerberos, and Winbind, and how you can configure theSystem Security Services Daemon feature to provide centralized identity and authenticationmanagement.Local Account ConfigurationThis chapter describes how to configure and manage local user and group accounts.Chapter 4System Security AdministrationSystem Security AdministrationThis chapter describes the subsystems that you can use to administer system security,including SELinux, the Netfilter firewall, TCP Wrappers, chroot jails, auditing, systemlogging, and process accounting.OpenSSH ConfigurationThis chapter describes how to configure OpenSSH to support secure communicationbetween networked systems.5VirtualizationThis section contains the following chapters:•Linux Containers describes how to use Linux Containers (LXC) to isolate applications and entire operating system images from the other processes that are running on a hostsystem.•Using KVM With Oracle Linux describes how to use an Oracle Linux system as ahypervisor with Kernel-based Virtual Machine (KVM) and provides information oninstalling virtualization packages.Linux ContainersThis chapter describes how to use Linux Containers (LXC) to isolate applications and entireoperating system images from the other processes that are running on a host system.For information about how to use the Docker Engine to create application containers, see theOracle Container Runtime for Docker User's Guide.Using KVM With Oracle LinuxThis chapter describes the Kernel-based Virtual Machine (KVM) feature.。
数据业务激活流程数据业务的激活流程是上网的前提,只有经过激活,网络分配了IP地址,DNS等参数,浏览器,Email等应用才能够访问网络本文主要介绍数据业务的激活流程,通过阅读本文,可以理清从应用开启数据开关一直到发OTA消息到网络侧这一阶段是如何调用的,以及在各个方法的主要工作。
AP侧基于Android4.4,Modem基于高通的MSM8926,网络模式主要是基于UMTS的。
因此阅读本文最好有代码,android的代码是开源的,可以从google 的网址上下,高通的代码不是开源的,只有手机厂商才有部分权限。
因此本文最适合手机厂商的协议开发工程师。
因为要解决数据业务的问题,第一步检查的就是是否已经激活,如果不能激活,要查看在哪一步出现问题没有激活,。
对于非手机开发工程师,可以了解一下上网的流程。
要对数据业务架构,可以参考《android数据业务架构(qualcomm平台)》。
下面开始从设置界面点击数据开关开始,一步步说明激活流程的函数调用步骤:Step1、ConnectivityManager::setMobileDataEnabled数据开关的接口,该接口是应用可以直接调用的,在setting里开关数据就是首先调用该接口。
主要通过binder调用的是Server端的相应接口,见下一步Step2、ConnectivityService::setMobileDataEnabled首先检查权限,调用的进程是否声明了CHANGE_NETWORK_STATE的权限,最后发一个EVENT_SET_MOBILE_DATA的事件以便调用者不阻塞。
处理消息的是方法handleSetMobileData,调用MobileDataStateTracker的setUserDataEnableStep3、MobileDataStateTracker::setUserDataEnable通过AsyncChannel,发命令CMD_SET_USER_DATA_ENABLE到dcTrackerBase,在开始初始化的时候就进行关联Step4、DcTrackerBase::onSetUserDataEnabled收到发过来的命令,会在DcTrackerBase:handleMessage里处理,然后调用的是onSetUserDataEnable,在这里会保存数据库,通知MobileDataStateTracker apn 已经available了,如果是开启数据业务,下一步是调用onTrySetupDataStep5、DcTracker::onTrySetupData这里调用setupDataOnConnectableApns,而在setupDataOnConnectableApns里,首先变量所有的ApnContext,首先如果状态是FAIL的,则改为IDLE。

android数据业务激活流程本文将介绍数据业务的激活流程,这是上网的前提。
只有通过激活,网络才能分配IP地址、DNS等参数,浏览器、Email等应用才能访问网络。
本文将从应用开启数据开关一直到发OTA消息到网络侧,详细说明这一阶段的调用方法和主要工作。
需要注意的是,本文主要针对Android4.4平台和XXX的MSM8926模块,网络模式主要基于UMTS。
因此,阅读本文时最好有相关代码。
对于非手机开发工程师,也可以了解一下上网的流程。
要对数据业务架构进行了解,可以参考《android数据业务架构(m平台)》。
激活流程的函数调用步骤如下:Step1:ConnectivityManager::XXX该接口是应用可以直接调用的,在setting里开关数据就是首先调用该接口。
主要通过binder调用的是Server端的相应接口。
Step2:ConnectivityService::XXX首先检查权限,调用的进程是否声明了CHANGE_NETWORK_STATE的权限,最后发一个EVENT_SET_MOBILE_DATA的事件以便调用者不阻塞。
处理消息的是方法XXX,调用XXX的setUserDataEnable。
Step3:XXX::XXX通过AsyncChannel,发命令CMD_SET_USER_DATA_ENABLE到dcTrackerBase,在开始初始化的时候就进行关联。
Step4:DcTrackerBase::XXX此步骤是整个激活流程的关键,通过向RIL发送RIL_REQUEST_ALLOW_DATA调用,启动数据连接。
如果激活成功,将会收到RIL_UNSOL_DATA_CALL_LIST_CHANGED的消息。
如果激活失败,将会收到RIL_UNSOL_DATA_CALL_LIST_CHANGED的消息,其中reason字段将会标记失败原因。
收到命令后,会在在onTrySetupData中,会调用XXX。

⾼通androidQMI机制⾼通android QMI机制概论Qualcomm MSM Interface,作⽤⽤于AP和BP侧的交互,通俗说法就是让设备终端TE(可以是⼿机,PDA,计算机)对⾼通BP侧的AMSS系统进⾏操作,如调⽤函数,读取数据,设置其中的NV项等。
QMI的核⼼称之为QMI框架(QMI Framework),其主要功能包括以下3点:连接MSM模块和设备终端,提供⼀个正交的控制和数据通道。
在QMI的消息⽤有两种定义,⼀种是QMIControl Message;另⼀种是QMI DataMessage,⽀持这两种消息并发,不会互相⼲扰导致出错。
列举⼀系列的枚举逻辑设备,提供给连接使⽤。
QMI机制类似于⼀个服务器机制,有相应的client端和services端,对应于QMI的control point和service。
在AP向BP发送请求时,AP作为client端,当AP接收BP侧返回的响应时,AP作为services端。
QMI包含了⼀系列的QMI Service,例如nas,voice,wds等,这些不同的services相当于不同逻辑设备,给不同的app调⽤。
QMI有相应的消息和消息的协议,设备终端就是通过这些消息来访问AMSS。
对于不同的qmi消息,消息长度不⼀样,可⾃⼰定义消息长度,不同的qmi消息,消息格式是相同的。
上图是QMIFramework的⼀个软件结构图。
从图中可以看出,上层控制点打包对应类型的QMI消息或通过其他操作系统的框架,将要发出的数据传到AP侧底层的逻辑设备,最后逻辑设备通过内联的总线接⼝,传到BP侧的AMSS。
在代码中可以找到从控制点发送到逻辑设备的函数。
rrno_enum_type qcril_qmi_client_send_msg_sync {qcril_qmi_client_e_type svctype,unsigned long msg id,*void req_c struct,int reg_c_struct_len,void *resp_c_struct,int resp_c_struct_ len}这个是控制点向BP侧发送同步消息的函数,参数包括⾛的QMI_Service类型,Service⾥⾯消息的名称,请求消息的初始地址,长度,返回相应的初始地址和长度。
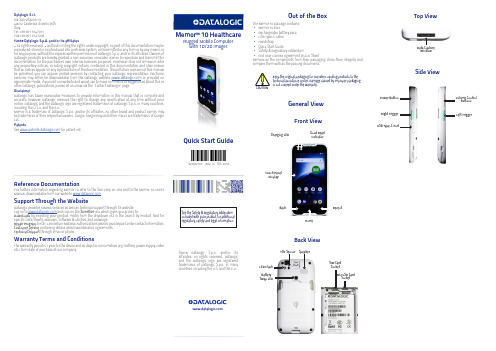
Datalogic S.r.l.Via San Vitalino 1340012 Calderara di Reno (BO)ItalyTel. +39 051 3147011Fax +39 051 3147205©2018 Datalogic S.p.A. and/or its affiliatesw All rights reserved. w Without limiting the rights under copyright, no part of this documentation may be reproduced, stored in or introduced into a retrieval system, or transmitted in any form or by any means, or for any purpose, without the express written permission of Datalogic S.p.A. and/or its affiliates. Owners of Datalogic products are hereby granted a non-exclusive, revocable license to reproduce and transmit this documentation for the purchaser’s own internal business purposes. Purchaser shall not remove or alter any proprietary notices, including copyright notices, contained in this documentation and shall ensure that all notices appear on any reproductions of the documentation. Should future revisions of this manual be published, you can acquire printed versions by contacting your Datalogic representative. Electronic versions may either be downloadable from the Datalogic website () or provided on appropriate media. If you visit our website and would like to make comments or suggestions about this or other Datalogic publications, please let us know via the “Contact Datalogic” page.DisclaimerDatalogic has taken reasonable measures to provide information in this manual that is complete and accurate, however, Datalogic reserves the right to change any specification at any time without prior notice. Datalogic and the Datalogic logo are registered trademarks of Datalogic S.p.A. in many countries, including the U.S.A. and the E.U.Memor is a trademark of Datalogic S.p.A. and/or its affiliates. All other brand and product names may be trademarks of their respective owners. Google, Google Play and other marks are trademarks of Google LLC.PatentsSee for patent list.Reference DocumentationFor further information regarding Memor 10 refer to the SDK Help on-line and to the Memor 10 User’s Manual, downloadable from our website .Support Through the WebsiteDatalogic provides several services as well as technical support through its website.Log on to and click on the SUPPORT link which gives you access to:Downloads by selecting your product model from the dropdown list in the Search by Product field for specific Data Sheets, Manuals, Software & Utilities, and Drawings;Repair Program for On-Line Return Material Authorizations (RMAs) plus Repair Center contact information; Customer Service containing details about Maintenance Agreements;Technical Support through email or phone.Warranty Terms and ConditionsThe warranty period is 1 year for the device and 90 days for consumables (e.g. battery, power supply, cableetc.) from date of purchase at our company.Memor™ 10 HealthcareRugged Mobile Computerwith 1D/2D ImagerQuick Start Guide822002760 (Rev. A) Oct. 2018See the Safety & Regulatory Addendumincluded with your product for additionalregulatory, safety and legal information.©2018 Datalogic S.p.A. and/or itsaffiliates. All rights reserved. Datalogicand the Datalogic logo are registeredtrademarks of Datalogic S.p.A. in manycountries, including the U.S. and the E.U.Out of the BoxThe Memor 10 package contains:yy Memor 10 PDAyy Rechargeable battery packyy USB Type-C cableyy Handstrapyy Quick Start Guideyy Safety & Regulatory Addendumyy End User License Agreement (EULA) SheetRemove all the components from their packaging; check their integrity andcompare them with all the packing documents.Keep the original packaging for use when sending products to thetechnical assistance center. Damage caused by improper packagingis not covered under the warranty.General ViewDisplayCharging LEDGood ReadIndicatorFront ViewLED FlashBatterySwap LEDSIM CardBack ViewTop ViewWindowSide ViewRight Trigger Left TriggerPower ButtonUSB Type-C PortButtonsCharge with the DockInsert the device into the dock with the screen facing front and the head facing up.Use only the Datalogic power supply 94ACC0197 to power any of the docks.Do not put any foreign object such as, but not limited to, coins, paper clips, stickers inside the slot of any of the docks.Do not apply any sticker to the Memor 10 (see the examples below).For information on the single slot dock/ 3-slot dock/ vehicle dock/ 4-slot battery charger refer to the Quick Start Guide included in the dock's box.NOTEThe Memor 10 may get warm during charging. This is normal and does not mean a malfunction.NOTESIM Card Installation1. Turn off the Memor 10 or put it in swap battery mode (refer to the User’s Manual for more details).2. Remove the battery pack (see Battery Installation ):3. Insert the SIM card with the written part upward.4.Replace the battery (see Battery Installation).MicroSD Card Installation1. Turn off the Memor 10 or put it in swap battery mode (refer to the User’s Manual for more details).2. Remove the battery pack (see Battery Installation):3.Insert the microSD card with the written part upward.4. Replace the battery (see Battery Installation ).Scanning and Imaging2D Imager Data CaptureTo scan a bar code symbol:1.Point the scan window at the bar code.2. Press the scan key. A blue-violet spot illuminates the symbol, which is captured and decoded.If the scan has been successful:y y If enabled, the good read beep plays.y yIf enabled, the GreenSpot projects a green spot onto the bar code image.y y The good read indicator positioned at the top left side of the display glows green constantly.Cleaning InstructionsPeriodically clean the Memor 10 Healthcare device and the dock using a soft cloth slightly dampened with only water, or or one of the following allowed cleaning agents:y y Sani-Cloth® HB, Sani-Cloth® Plus, y y Super Sani-Cloth® y y Hepacide Quat II y y Alcohol Wipes 70% y y CaviWipesTM y y Virex® 256y y 409® Glass and Surface Cleaner y y Windex®y y Clorox® Bleachy y 100% Gentle dish soap and water.Do not use any other cleaning agents (e.g. different alcohol, abrasive or corrosive products, solvents) or abrasive pads to clean the device.Do not spray or pour liquids directly onto the device.Battery Installation1. Rotate the latches to the open position:2. Insert the battery pack into the slot, bottom first, and press it into place:3. Rotate the latches to the lock position to lock the cover:Charging InstructionsThe battery pack is not initially fully charged. After installing the battery, charge it with the USB Type-C or with a dock (single slot dock, 3-slot dock, vehicle dock, 4-slot battery charger).During the charging process the charging LED positioned at the top left side of the display glows red constantly. Once the charging process has been completed, the charging LED glows green constantly.Charge with USBUse the provided USB Type-C cable in conjunction with the power supply adapter (p/n 94ACC0196) to charge the device from a power outlet.The charger is modular, with one adapter and five switchover plugs.You can also use the USB cable to charge the Memor 10 from any self-powered USB hub or USB port on a computer.Use only the Datalogic power supply 94ACC0196 to power the Memor 10.。

深圳市英蓓特科技公司EM-TF-EVK-AM5728 Linux软件用户手册V1.0版权声明EM-TF-EVK-AM5728评估板及其相关知识产权由深圳市英蓓特科技有限公司所有。
本文档由深圳市英蓓特科技有限公司版权所有,并保留一切权利,在未经英蓓特公司书面许可的情况下,不得以任何形式来修改、分发或复制本文档的任何部分。
免责声明产品附带提供的程序源代码、软件、资料文档等,深圳市英蓓特有限公司不提供任何类型的担保;不论是明确的,还是隐含的,包括但不限于合适特定用途的保证,全部的风险,由使用者来承担。
版本记录版本描述作者日期V0.1 草稿Jerry/David 20180806 V1.0 正式发布Sandy 20180827目录版本记录 (3)目录 (4)第1章介绍 (7)1.1 软件包介绍 (7)1.2 功能列表 (8)第2章快速启动 (9)2.1 从eMMC启动系统 (9)2.2 从SD卡启动系统 (11)第3章功能的配置与说明 (12)3.1 USER LED (12)3.2 蜂鸣器 (12)3.3 按键 (12)3.4 继电器 (13)3.4.1 LS1 (13)3.4.2 LS2 (13)3.5 光耦 (13)3.5.1 OC1 (13)3.5.2 OC2 (14)3.6 RTC (14)3.7 eMMC (14)3.8 QSPI_Flash (15)3.9 显示 (16)3.9.1 选择显示设备 (16)3.9.2 LCD屏幕亮度调节 (16)3.10 触摸屏 (16)3.11 音频 (17)3.11.1 板载音频接口 (17)3.11.2 HDMI音频播放 (18)3.12 UART (18)3.12.1 UART1 (18)3.12.2 UART10 (18)3.12.3 RS485 (19)3.13 板载千兆网口 (19)3.13.1 配置静态IP (19)3.13.2 配置自动获取IP (19)3.14 PCIE网卡 (19)3.14.1 PCIE网卡的使用 ....................................................................................... 错误!未定义书签。
Emlinix感谢您选择英利嵌入式Linux工控主板。
英利EM9x60系列工控主板包括五个型号:EM9160、EM9161、EM9260、EM9360和EM9460。
为便于读者了解和使用英利产品,本手册中一些部分会以EM9160为例进行讲解;一些示例程序也会以EM9160命名。
然而,本手册和上述示例程序完全适用于这五个产品。
英利EM9x60工控主板是面向工业自动化领域的高性价比嵌入式工控主板,其硬件核心为工业级的ARM9芯片AT91SAM9260和AT91SAM9261(EM9161)。
EM9x60预装嵌入式Linux-2.6实时多任务操作系统,并针对板载的各个接口,提供了完整的接口底层驱动以及丰富的应用程序范例。
用户可在此基础上,利用熟悉的各种软件工具直接开发自己的应用程序,以方便、快速地构成各种高性能工控产品。
本手册主要是为在英利嵌入式Linux工控主板上进行Linux应用程序开发的客户提供基本的编程指南。
此外,英利公司针对软硬件开发环境的配置编写有《英利Linux工控主板使用必读(EM9x60)》;针对工控主板和开发评估底板的使用编写有相应的使用手册。
这些手册都包含在英利为用户提供的产品开发光盘里面,用户也可以登录英利公司网站下载相关资料的最新版本。
在使用英利产品进行应用开发的过程中,如果您遇到任何困难需要帮助,都可以通过以下三种方式寻求英利工程师的技术支持:1、直接致电028-******** 853293602、发送邮件到技术支持邮箱support@3、登录英利网站,在技术论坛上直接提问另,本手册以及其它相关技术文档、资料均可以通过英利网站下载。
注:英利公司将会不断完善本手册的相关技术内容,请客户适时从公司网站下载最新版本的手册,恕不另行通知。
再次谢谢您的支持!目录1 前言 (4)2 G++集成开发环境入门 (7)2.1S OURCERY G++IDE下创建和管理C++应用工程 (7)2.2S OURCERY G++IDE下编译C++应用工程 (16)3 通过NFS进行应用程序调试 (20)3.1在W INDOWS开发主机配置NFS服务器 (20)3.2使用NFS在EM9X60主板上挂载应用程序工作目录 (21)3.3应用程序测试运行 (22)3.4应用程序PRINTF语句的使用 (24)4 驱动程序及其调用方法 (25)4.1L INUX驱动程序调用方法概述 (25)4.2精简ISA总线驱动程序 (26)4.3GPIO驱动程序 (28)4.4矩阵键盘驱动程序 (30)4.5外部硬中断驱动程序 (32)4.6看门狗WDT驱动程序 (35)4.7系统配置信息驱动程序 (36)5 应用程序编程范例之一:LCD显示 (38)5.1EM9X60单色LCD显示 (38)5.2EM9161彩色LCD显示 (41)6 应用程序编程范例之二:串口通讯 (46)6.1串口编程接口函数 (46)6.2串口综合应用示例 (47)7 应用程序编程范例之三:TCP服务器 (53)7.1TCP S OCKET编程 (53)7.2支持多连接的TCP服务器应用示例 (53)8 应用程序编程范例之四:TCP客户端 (58)8.1TCP客户端S OCKET编程流程 (58)8.2TCPC LIENT应用示例 (58)附录1 版本信息管理表 (64)1 前言Linux操作系统是当前嵌入式系统中使用最为广泛的操作系统。
RIL/QMI/Linux Data Start Guide1简介本文档为RIL/QMI/Linux Data入门介绍文档,目的是指导RIL新同事学习的内容和顺序,加快学习速度,尽快掌握相关知识。
RIL/QMI/Linux Data涉及的内容比较多,要掌握这些模块需要学习如下内容:AP侧:掌握Android Framework Telephony、RILD、QMI、DSS、NETMGR等AMSS侧:了解CM、WMS、UIM、PBM、STK、MMGSDI等模块的接口和典型消息流程,Data Service相关模块和Call Flow相关协议:了解GSM、WCDMA、CDMA相关协议,例如MO、MT信令流程,SIM 卡相关协议等。
由于内容太多,我们需要循序渐进,可以按照下面的顺序学习,具体每个模块相关资料和代码列在后面●RILD/RIL-LIB/Reference-RIL●Framework RIL JAVA●QCRIL框架,CM、WMS、UIM模块典型的业务流程(例如MO CALL、MTCALL、MO SMS、MT SMS、开机流程等),可以同时参考AMSS侧相关模块的介绍、接口文档、典型Case的Call Flow,不需要深入学习AMSS侧相关模块代码,两边结合更容易理解业务流程●QMI架构介绍●QCRIL DATA●NET MGR●QMI MUX、QMI CTRL、QMI Service Linux侧代码●DSS●Framework Data Call相关代码注:RILD/RIL-LIB/Framework这三部分为Android平台代码,如果以前做过其它平台则可以直接跳过去;其他部分为Qualcomm平台独有部分。
2Android RIL2.1文档Android RIL部分网上有很多资料可供参考,如果以前没有接触过RIL可以先看一些介绍RIL架构的文档,先了解Android中Telephony整体架构,Telephony的层次架构、模块,每个模块的功能,重点先放在Rild和QCRIL 上,掌握之后再去看Framework层的RIL JAVA和GSMPhone或者CDMAPhone。
具体可以先看一下下表列出的一些资料,其中Android Radio Layer Interface这篇PPT比较好,讲的很清楚。
另外Reference-ril使用AT命令与Modem通信,与Qualcomm平台差别很大,reference-ril只需要大致了解其处理流程即可,不需要深入学习其代码。
编号名称描述1 Radio Layer Interface/android/mydroid/development/pdk/do cs/telephony.html Android SDK中的RIL 介绍2 Android电话系统-概述篇/maxleng/article/details/5576509Android 平台RIL整体架构3 Android电话系统之-RILD/maxleng/article/details/5576637RILD框架及内部原理介绍,QCRIL 是RILD 的一部分4 Android电话系统之RIL-Java/maxleng/article/details/5593759Framewo rk层RIL Command Interfa ce5 Android电话系统之GSMCallTracker/maxleng/article/details/5593780GSM Call Tracker Call管理6Android RIL结构分析与移植/view/2ed3105abe23482fb4da4c09.html 介绍了RILD的Event 机制、初始化流程,以及Request 、Respons e流程分析,7Android Radio Layer Interface/ssusere3af56/android-radio-layer-interface 比较详细的介绍了RILD;包括架构,各个子模块的功能和实现细节,以及数据处理流程,值得仔细阅读2.2代码重点看RILD和RIL LIB,了解一下Reference-ril,其他模块在看流程时可以参考一下编号名称描述1 RildRildmian函数hardware\ril\rild2 RILLibraryRIL抽象层hardware\ril\libril3 reference-ril基于AT命令的Vendor-spec实现hardware\ril\reference-ril4 RIL JAVAFramework层CommandInterface,Framework通过RIL JAVA与RILD通信frameworks\base\telephony\java\com\android\internal\tele phony\RIL.java5 GSMPhone相关实现代码frameworks\base\telephony\java\com\android\internal\tele phony\gsm6 CDMAPhone相关实现代码frameworks\base\telephony\java\com\android\internal\tele phony\cdma7 PhoneAPPPhone服务运行在该APPCall处理也在该APPpackages\apps\Phone8 MMS和SMS APPpackages\apps\Mms9 STK APP packages\apps\Stk3QCRIL3.1文档该部分为Qualcomm Vendor-spec RIL实现,与Reference-ril完全不同,比传统的AT命令方式更难理解,代码中有两套RIL:qcril_fusion和qcril_qmi,目前大部分平台都是使用qcril_fusion,但是后面会逐步过渡到qcril_qmi。
Qcril_fusion实现方式大部分功能通过ONCRPC,只有Data Service和UIM使用QMI。
建议仔细阅读《高通平台RIL简介.pdf》这篇文章,写的比较详细。
在涉及到相关流程时,请参考一下AMSS对应模块文档中的Call Flow,这样更容易理解。
另外我们只需要看QCRIL的代码,ONCRPC的代码不需要看。
编号名称描述1 80-VM248-1_C_Android_QCRIL_Overview QCRIL Overview,目前使用较多的为该架构2 80-N2442-1_C_Linux_Android_QCRIL_QMI 基于QMI方式的QCRIL,暂时不用看3 高通平台RIL简介.pdf TS内部总结文档,比较详细,建议以此为重点学习QCRIL4 80-VG802-1_E_MSM7xxx_QSD8xxx_QSTxxxx_Linux_ONCRPC ONCRPC介绍,QCRIL Fusion使用ONCRPC调用Modem侧的CM、WMS等服务5 80-V3568-1_J_Multimode_CM_Overview.pdf Call Manager Overview6 80-N2269-1_C_Dual_SIM_Dual_Standby_Overview双卡双待Overview3.2代码重点看qcril_fusion,qcril_qmi先不看编号名称描述1 Qcril fusion vendor\qcom\proprietary\qcril\qcril_fusion2 Qcril_qmi vendor\qcom\proprietary\qcril\qcril_qmi3 UIM vendor\qcom\proprietary\qcril\common\uim4 Data vendor\qcom\proprietary\qcril\common\data4QMI4.1文档先了解一下QMI架构,包括Mux、Ctrl、Service等,然后看一下目前使用的QMI Service(WDS、UIM、QoS、NAS)模块介绍。
qmi_linux_application_note这篇文章介绍了Linux端的QMI具体实现细节,以及数据处理流程。
编号名称描述1 80-VR459-1_C_QMI_Framework_Overview.pdf QMI Framework Overview 介绍QMI Framework的PPT2 80-VB816-1_A_QMI_Architecture.pdf QMI架构介绍3 80-VB816-3_E_QMI_Control_Service_QMI_CTL.pdf QMI CTRL SPEC 详细的接口定义4 80-VB816-9_E_QMI_Wireless_Message_Service.pdf QMI Wireless Message ServiceSMS和CB详细接口定义5 80-VB816-13_A_QMI_for_WMS.pdf QMI SMS PPT6 80-VB816-10_F_QMI_Voice_Service.pdf QMI Voice(CALL、USSD、SS)接口Spec7 80-VB816-15_E_QMI_PBM.pdf QMI PBM接口Spec8 qmi_linux_application_note TS内部文档4.2代码编号名称描述1 Qmux、QCTL、Service代码vendor\qcom\proprietary\qmi\src5Linux Data5.1文档该部分涉及的内容较多,包括Framework Data Call、QCRIL、NETMGR、DSI_NETCTRL、DSS、VED Driver等,重点看80-VH396-1_A_Linux_Data_Service_Architect这篇文档。
编号名称描述1 80-VH396-1_A_Linux_Data_Service_ArchitectData Service Architecture2 80-V6123-1_J_Multimode_Data_ServicesMultimode Data Services3 80-VT996-1_D_QMI_WDS QMI WDS介绍4 80-VB816-5_L_QMI_WDS_Major_v1_Minor_v9QMI WDS接口定义5 80-VF536-2_B_QMI_QoS_FDD Quality of Service6 netmgrd介绍TS内部文档7 setup_data_msc Setup Data Call和DeactiveData Call的MSC图5.2代码编号名称描述1 RIL Data vendor\qcom\proprietary\qcril\common\data2 DSI NET CTRL vendor\qcom\proprietary\data\dsi_netctrl3 Netmgr vendor\qcom\proprietary\data\netmgr4 Dss vendor\qcom\proprietary\data\dss5 Framework中DataCall相关部分,例如DataConnection、DataConnectionTracker frameworks\base\telephony\java\com\android\inter nal\telephony/view/436e1deb5ef7ba0d4b733b04.html。