2012-2013年现代控制系统试题
- 格式:doc
- 大小:284.00 KB
- 文档页数:7

现代控制理论试卷 1一、(10分)判断以下结论,若是正确的,则在括号里打√,反之打×(1)用独立变量描述的系统状态向量的维数是唯一。
()(2)线性定常系统经过非奇异线性变换后,系统的能观性不变。
()(3)若一个系统是李雅普诺夫意义下稳定的,则该系统在任意平衡状态处都是稳定的。
()(4)状态反馈不改变被控系统的能控性和能观测性。
()(5)通过全维状态观测器引入状态反馈来任意配置系统的闭环极点时,要求系统必须同时能控和能观的。
()二、(12分)已知系统1001010,(0)00121x x x⎛⎫⎛⎫⎪ ⎪==⎪ ⎪⎪ ⎪⎝⎭⎝⎭,求()x t.三、(12分) 考虑由下式确定的系统:2s+2(s)=43Ws s++,求其状态空间实现的能控标准型和对角线标准型。
四、(9分)已知系统[]210020,011003x x y⎡⎤⎢⎥==⎢⎥⎢⎥-⎣⎦,判定该系统是否完全能观?五、(17分) 判断下列系统的能控性、能观性;叙述李亚普诺夫稳定性的充要条件并分析下面系统的稳定性.[]xy u x x 11103211=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--=六、(17分)已知子系统1∑ 111121011x x u -⎡⎤⎡⎤=+⎢⎥⎢⎥-⎣⎦⎣⎦,[]1110y x = 2∑ []22222110,01011x x u y x -⎡⎤⎡⎤=+=⎢⎥⎢⎥-⎣⎦⎣⎦求出串联后系统的状态模型和传递函数.七、(15分)确定使系统2001020240021a x x u b -⎡⎤⎡⎤⎢⎥⎢⎥=-+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦为完全能控时,待定参数的取值范围。
八、(8分)已知非线性系统 ⎩⎨⎧--=+-=2112211sin 2x a x xx x x试求系统的平衡点,并确定出可以保证系统大范围渐近稳定的1a 的范围。
现代控制理论 试卷 1参考答案一、(10分)判断以下结论,若是正确的,则在括号里打√,反之打× (1) 用独立变量描述的系统状态向量的维数是唯一。
第一章自动控制的一般概念一.是非题1.开环控制是一种反馈控制(×)2.开环控制的稳定性比闭环控制的稳定性要好(×)3.线形系统的主要特点是具有齐次性和叠加性(√)4.线性定常系统的各项系数是与时间有关的 (×)5.闭环控制的控制精度在很大程度上由形成反馈的测量元件的精度决定的(√)6.自动控制就是采用控制装置使被控对象自动的按给定的规律运行,使被控对象的一个或数个物理量能够在一定的精度范围内按给定的规律变化(√)7.自动控制系统有两种最基本的控制形式即开环控制,闭环控制(√)二.选择题1.下述(D)不属于对闭环控制系统的基本要求。
(A)稳定性(B)准确性(C)快速性 (D)节能性2.自动控制系统一般由(D)组成(A)输入和输出(B)偏差和反馈 (C)控制量和扰动(D)控制器和被控对象3.在组成系统的元件中,(A),即为非线形系统(A)只要有一个元、器件的特性是非线形的(B)有且只有一个元、器件的特性是非线形的(C)两个及两个以上的元、器件的特性是非线形的(D)所有的元器件的特性都是非线形的4.古典控制理论形成于(D)(A)2000年前 (B)1000年前(C)100年前(D)20 世纪20—40年代 5.对于一个自动控制、系统的性能要求可以该概括为三个方面:(A)快速性和准确性(A)稳定性(B)定常性(C)振荡性(D)抗干扰性6.传递函数的概念除了适用于定常系统之外,还可以描述(A)系统(A)线形时变(B)非线性定常(C)非线形时变( D )以上都不是 7.在控制系统中被控制的物理量是被控量,直接改变被变量的元件称为(A)(A)执行元件 (B)控制元件(C)调节器(D)测量元件8.在通常的闭环控制系统结构中,系统的控制器和控制对象共同构成了(B)(A)开环传递函数(B)前向通道(C)反馈通道(D)闭环传递函数 9.下面数学模型中(D)是线形定常系统的外部描述(A)传递函数(B)微分方程 (C)频率特性(D)前面三种都是三.填空题1.自动控制系统的两种最基本形式即开环控制 ,闭环控制。
DCS2012年的考试题及答案一、单项选择题(每题2分,共20分)1. DCS2012年的考试中,以下哪个选项不是控制系统的基本组成部分?A. 传感器B. 执行器C. 被控对象D. 数据库答案:D2. 在DCS2012年的考试中,关于控制阀的描述,哪一项是错误的?A. 控制阀是执行器的一种B. 控制阀用于调节流体的流动C. 控制阀的开度与控制信号成正比D. 控制阀的开度与控制信号成反比答案:D3. DCS2012年的考试中,关于PID控制器的描述,哪一项是正确的?A. PID控制器只能用于连续控制B. PID控制器包括比例、积分和微分三个环节C. PID控制器不能用于离散控制D. PID控制器的微分作用可以消除稳态误差答案:B4. 在DCS2012年的考试中,关于传感器的描述,哪一项是正确的?A. 传感器是将非电信号转换为电信号的装置B. 传感器只能用于测量温度C. 传感器的输出信号与被测量的物理量无关D. 传感器的精度越高,其测量误差越小5. DCS2012年的考试中,关于执行器的描述,哪一项是错误的?A. 执行器是控制系统的输出设备B. 执行器用于控制被控对象C. 执行器的类型与被控对象无关D. 执行器的响应速度影响系统的控制效果答案:C6. 在DCS2012年的考试中,关于控制系统的稳定性,哪一项描述是正确的?A. 系统稳定性与控制器的类型无关B. 系统稳定性与控制器的参数设置有关C. 系统稳定性与被控对象的特性无关D. 系统稳定性与传感器的精度无关答案:B7. DCS2012年的考试中,关于控制系统的响应时间,哪一项描述是错误的?A. 响应时间是指系统从接收到控制信号到输出稳定所需的时间B. 响应时间越短,系统的动态性能越好C. 响应时间越长,系统的稳定性越好D. 响应时间可以通过调整控制器参数来改善答案:C8. 在DCS2012年的考试中,关于控制系统的超调量,哪一项描述是正确的?A. 超调量是指系统响应过程中的最大偏差B. 超调量是指系统响应过程中的最小偏差C. 超调量是指系统响应过程中的稳定偏差D. 超调量是指系统响应过程中的瞬时偏差9. DCS2012年的考试中,关于控制系统的稳态误差,哪一项描述是错误的?A. 稳态误差是指系统达到稳态后输出与期望值之间的差异B. 稳态误差与系统的类型有关C. 稳态误差与系统的参数设置有关D. 稳态误差与系统的动态性能无关答案:D10. 在DCS2012年的考试中,关于控制系统的鲁棒性,哪一项描述是正确的?A. 鲁棒性是指系统在参数变化时仍能保持稳定运行的能力B. 鲁棒性是指系统在外部干扰下仍能保持稳定运行的能力C. 鲁棒性是指系统在内部故障时仍能保持稳定运行的能力D. 鲁棒性是指系统在任何情况下都能保持稳定运行的能力答案:A二、多项选择题(每题3分,共15分)11. DCS2012年的考试中,以下哪些因素会影响控制系统的稳定性?A. 控制器的类型B. 控制器的参数设置C. 被控对象的特性D. 传感器的精度答案:ABC12. 在DCS2012年的考试中,以下哪些因素会影响控制系统的响应时间?A. 执行器的响应速度B. 控制器的参数设置C. 被控对象的特性D. 传感器的精度答案:ABC13. DCS2012年的考试中,以下哪些因素会影响控制系统的超调量?A. 控制器的参数设置B. 被控对象的特性C. 传感器的精度D. 执行器的响应速度答案:ABD14. 在DCS2012年的考试中,以下哪些因素会影响控制系统的稳态误差?A. 控制器的类型B. 控制器的参数设置C. 被控对象的特性D. 传感器的精度答案:BC。


、名词解释与简答题(共3题,每小题5分,共15分)U i21 这甲 3!::l即U['4 _3 111 02 7 ^23 -u 2⑶尖用芷養变换送求取状壽空问表込5t 对賀分产 程⑶在零初Ife 条井下取拉氏娈换笹Jv(J)+ ⅛⅛(r)+3⅛ru) + 5K⅛)=5ιt⅛j)+7Γ(i) Γ⅛⅜g√⅛7LF(O =S 7Ti?+JijTS在用传诺两數求系绑的状态空何表达式IL 一定要 注咸传递函JS 足百为严搐H 育瑾分SL 即■是百小 于札 ⅛ffl =ri WPflTSt 理*U C1R 2 _ U 2U C 21、经典控制理论与现代控制理论的区别2、对偶原理的内容3、李雅普诺夫稳定5、已知系统的微分方程 y - 2y 3y7u。
试列写出状态空间表达式。
6、试将下列状态方程化为对角标准型或者约当标准型。
二、分析与计算题(共8小题,其中4-10小题每题10分,第11小题15分,共 85分)4、电路如图所示,设输入为U 1 ,输出为U 2 ,试自选状态变量并列写出其状态空间表达式。
麻曙秋恋爱■为J l*i ζlX i甘态空闿枝达式为 IHl IitBG 迦睾样机理分箭法,首先帳撼电踣定律则 ^ffl⅛⅛SS ・苒选澤就JS 娈■・求欄粗应的糸筑狀 盃空珂舌达式B 也珂以先由电路邀求袴糸址f⅛递函 ≡,再由悟越塑救求潯系臧帝空间表达式 采厢机理分护走“设G 两鋼电∣1⅛*ΓP G 两睛的电丘為越小则气 I *+ M TJ C M l⑴j Of ", ⅝+⅞c j i 1口白逐求得条统吠态△■期表込丄(刊 -13」LX3」L5ff It i.IW 1I⅛GV ∙K2 Lu试将下处伏越程化为朋融感P-I-I•-^S∣9U[-3-a 1•u≡IIZ7 4J u..,U.则猖对吊标■壯理l∣⅞^tη=Kn代入求聲公弍轉—⅛l- —<,i*2 f1 丿 1 ,j,1 ⅛'3f,-t i,rt<r-⅛* ft r2 2 2 1-r,(0J- JM(My IM MW-女"C F-3⅛"λf乩* J⅛4f丄■■i⅛,≡≡^Ll J——-一JfJOI-------- ---- X i(O)+βf- Iι7 -.∙Kl⅛ιp TΓl«期于占=-ι¾-I -L d-3 -( -2IJ Il∣2) IK:(IJ液转证追® 求4,j tf-3-3-1-2P llF l aLπIl%二i-3127J如n"Jf Ij= -3^f,A尸U1-12-41■'3 ⅛f,'=H1 -351 -21-I91-S5-21-12I35J7*5-27-Zfl -1I5 3 15J17I27JA_ 2*J22—_屯尸a371-15-27-202716HΛJ-A∣= -J Λs*^⅛r7、已知系统状态空间表达式为X -1-3 y =h:X Iu1 Ix求系统的单位阶跃响应。
一、选择题1.下面关于建模和模型说法错误的答案是( C )。
A.无论是何种系统,其模型均可用来提示规律或因果关系。
B.建模实际上是通过数据、图表、数学表达式、程序、逻辑关系或各种方式的组合表示状态变量、输入变量、输出变量、参数之间的关系。
C.为设计控制器为目的建立模型只需要简练就可以了。
D.工程系统模型建模有两种途径,一是机理建模,二是系统辨识。
2.系统()3()10()y t y t u t++=的类型是( B ) 。
A.集中参数、线性、动态系统。
B.集中参数、非线性、动态系统。
C.非集中参数、线性、动态系统。
D.集中参数、非线性、静态系统。
3.下面关于控制与控制系统说法错误的答案是( B )。
A.反应闭环控制可以在一定程度上克制不确定性。
B.反应闭环控制不可能克制系统参数摄动。
C.反应闭环控制可在一定程度上克制外界扰动的影响。
D.控制系统在达到控制目的的同时,强调稳、快、准、鲁棒、资源少省。
x Pz说法错误的答案是( D )。
4.下面关于线性非奇异变换=A.非奇异变换阵P是同一个线性空间两组不同基之间的过渡矩阵。
B.对于线性定常系统,线性非奇异变换不改变系统的特征值。
C.对于线性定常系统,线性非奇异变换不改变系统的传递函数。
D.对于线性定常系统,线性非奇异变换不改变系统的状态空间描述。
5.下面关于稳定线性系统的响应说确的是( A )。
A.线性系统的响应包含两局部,一部是零状态响应,一局部是零输入响应。
B.线性系统的零状态响应是稳态响应的一局部。
C.线性系统暂态响应是零输入响应的一局部。
D.离零点最近的极点在输出响应中所表征的运动模态权值越大。
6.下面关于连续线性时不变系统的能控性与能观性说确的是( A ) 。
A.能控且能观的状态空间描述一定对应着某些传递函数阵的最小实现。
B.能控性是指存在受限控制使系统由任意初态转移到零状态的能力。
C.能观性表征的是状态反映输出的能力。
D.对控制输入确实定性扰动影响线性系统的能控性,不影响能观性。
《自动控制系统》试卷(A卷)答案及评分标准1、答:虽然交流传动和直流传动是在19世纪中期先后诞生的,但由于直流电动机的电压、电流和磁通之间的耦合较弱,使直流电动机具有良好的机械特性和良好的控制性能,能够在大范围内平滑调速,启动、制动性能良好。
(2分)由于这些优点,直流调速系统在20世纪70年代以前一直在高精度、大范围调速的传动领域内占据主要地位。
交流电机虽然机械结构简单,但它是一多变量、非线性、强耦合的控制对象,使交流电机的控制相对直流电机较为复杂,实现高精度的控制较为困难,调速性能较差。
随着生产的不断发展,直流调速的缺点薄弱环节逐步显示出来:直流电动机的主要弱点是换向,而机械式换向器的表面线速度及换向电流、电压均有一极限容许值,这就使单台电机的转速和功率受到约束,超过这一极限时只好采用多电机拖动方案,从而增加了电机制造的难度和成本,并使调速系统复杂化。
在有些特高转速、特大功率的场合,则根本无法用直流拖动方案来实现。
另外,换向器必须定期停机检修,运行中还要经常观察其火花情况,因此,在恶劣环境下,难以保证其安全可靠性。
(3分)20世纪70年代能源危机促使人们开始研究交流调速系统,由于现代控制理论、新型大功率电力电子器件、新型变频技术以及微机控制技术均在实际应用中取得了很大的进展,为交流调速技术的发展创造了坚实的物质基础。
(2分)20世纪80年代起,交流调速技术取得了突破性的进展。
由于交流电机结构简单,价格便宜,制造维修容易,结合新兴的电力电子技术,特别是变频和矢量控制技术的完善,很好的解决了交流调速存在的问题,交流电机在高速、大容量、恶劣环境可使用方面明显优于直流电机,交流调速进入了电气传动控制的各个领域,交流调速系统的开发和应用如日中天,交流调速逐步实现了宽地调速范围,高地稳态精度,快的动态响应以及在四象限可逆运行等良好的控制性能,从性价比上看,交流调速也逐渐优于直流调速系统。
(2分)目前新的格局已经形成:交流调速系统上升到主导地位,交流调速技术逐步取代直流调速技术已成为不争的事实。
现代控制系统分析考试试题一、选择题1. 对于线性时不变系统,下列哪个是其传递函数的正确定义?A. 输入变量与输出变量之间的比例关系B. 输入变量与系统状态之间的比例关系C. 输入变量与系统输出之间的比例关系D. 输入变量与系统输入之间的比例关系2. 在控制系统中,负反馈的作用是什么?A. 增加系统动态响应B. 增大系统的鲁棒性C. 降低系统的稳定性D. 减小系统的开环增益3. 在控制系统设计中,控制器的作用是什么?A. 提供输入信号B. 改变系统结构C. 调整系统参数D. 控制系统输出4. 在传感器中,负反馈电路的作用是什么?A. 改善传感器的灵敏度B. 提高传感器的响应速度C. 减小传感器的输出误差D. 提供传感器的供电电源5. 当控制系统的闭环传递函数的极点存在于左半平面时,系统的稳定性是什么?A. 不稳定B. 稳定C. 无法确定D. 不确定二、简答题1. 请解释控制系统的闭环和开环。
2. 简述PID控制器的工作原理,并说明它的优点和缺点。
3. 请说明状态空间分析法在控制系统设计中的应用,并举例说明。
三、计算题1. 一个控制系统的开环传递函数为G(s)=4/(s+3),计算其闭环传递函数。
2. 一个系统的开环传递函数为G(s)=5/(s+1)(s+2),求该系统的稳定性。
四、论述题请论述控制系统的鲁棒性,并说明其在实际应用中的重要性。
总结:本篇文章围绕现代控制系统分析考试试题展开了讨论。
文章首先提出了一些选择题,通过选项的形式对读者的知识点进行考察。
之后,简答题部分对控制系统的闭环和开环、PID控制器的工作原理、状态空间分析法的应用进行了解答,旨在深入展开这些概念的理解和应用能力。
接下来,计算题部分通过具体的计算案例,考察读者对于传递函数和系统稳定性的计算能力。
最后,论述题部分对控制系统的鲁棒性进行了讨论,强调了在实际应用中对鲁棒性的重要性。
通过这篇文章的学习,读者可以对现代控制系统分析这一专题有更深入的了解和掌握。
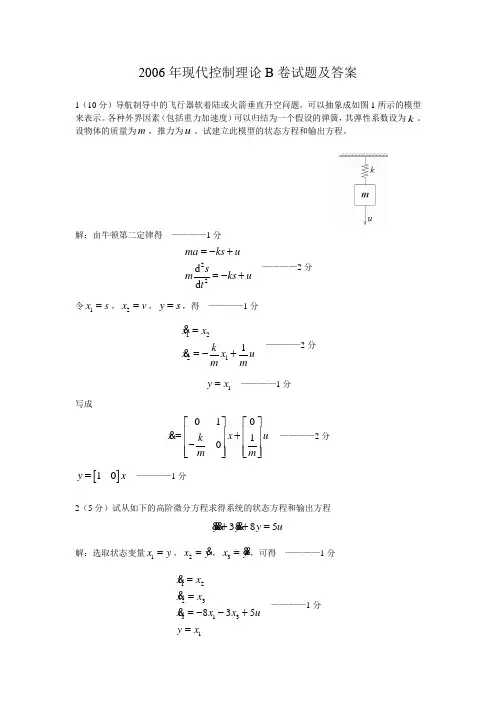
2006年现代控制理论B 卷试题及答案1(10分)导航制导中的飞行器软着陆或火箭垂直升空问题,可以抽象成如图1所示的模型来表示。
各种外界因素(包括重力加速度)可以归结为一个假设的弹簧,其弹性系数设为k 。
设物体的质量为m ,推力为u 。
试建立此模型的状态方程和输出方程。
解:由牛顿第二定律得 ————1分22d d ma ks usm ks u t=-+=-+ ————2分 令1x s =,2x v =,y s =,得 ————1分12211x x k x x um m==-+ ————2分1y x = ————1分写成01010x x u km m ⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥-⎢⎥⎢⎥⎣⎦⎣⎦————2分 []10y x = ————1分2(5分)试从如下的高阶微分方程求得系统的状态方程和输出方程385y y y u ++=解:选取状态变量1x y =,2x y =,3x y =,可得 ————1分12233131835x x x x x x x u y x ===--+= ————1分写成010*********x x u ⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦————2分[]100y x = ————1分3 (10分)已知系统 1001010,(0)00121x x x ⎛⎫⎛⎫ ⎪ ⎪== ⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭,求()x t解12100010012A O A O A ⎛⎫⎛⎫⎪== ⎪ ⎪⎝⎭⎪⎝⎭12101,12A A ⎛⎫== ⎪⎝⎭1200A tAt A t e e e ⎛⎫=⎪⎝⎭1A t t e e =…………………………..……….(2分)11210()12s sI A s ---⎛⎫-= ⎪--⎝⎭101111212s s s s ⎛⎫ ⎪-=⎪ ⎪-⎪---⎝⎭………..……….(2分) (){}2112220t A tt t t e eLsI A e ee --⎛⎫=-= ⎪-⎝⎭………..……….(2分) ()112200000tAt t t tt e e L sI A e e e e --⎛⎫ ⎪⎡⎤=-= ⎪⎣⎦⎪-⎝⎭……….……….(2分) ()(0)At x t e x =222001000001t t t t tt t e e e e e e e ⎛⎫⎛⎫⎛⎫ ⎪ ⎪⎪== ⎪ ⎪ ⎪ ⎪ ⎪ ⎪-⎝⎭⎝⎭⎝⎭……………..……….(2分)4 (5分)已知系统[]210 020,011003x x y ⎡⎤⎢⎥==⎢⎥⎢⎥-⎣⎦,判定该系统是否完全能控?解 [][]320300020012 110-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=CA ………..……….(1分) [][]940300020012 3202=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=CA ……..……….(1分)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=940320110 2CA CA C U O ………………..……….(1分)rank 2O U n =<,所以该系统不完全能观……..….…….(2分)5 (10分)将下列状态方程化为能控标准形u x x ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡-=11 4321 解 []⎥⎦⎤⎢⎣⎡-==7111Ab b U C ……..…………….…….(1分)()⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=-818181871C U ……..…………..…….…….(1分) 11188P ⎡⎤=-⎢⎥⎣⎦……..………….…..…….…….(1分) ⎥⎦⎤⎢⎣⎡=43412P ……..………….…...…….…….(1分) ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎦⎤⎢⎣⎡=4341818121P P P⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=-81418143811P ..………….…...…….…….(2分) 101105C A PAP -⎡⎤==⎢⎥-⎣⎦………….…...…….…….(2分)⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-==1011 43418181Pb b C ……….…...…….…….(1分)u x x ⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡-=10 51010 ……….…...…….…….(1分) 6 (5分)利用李亚普诺夫第一方法判定系统1211x x -⎡⎤=⎢⎥--⎣⎦的稳定性。
现代控制理论基础试题一、选择题:1. 什么是现代控制理论的核心概念?A. 反馈原理B. 开环控制C. 传感器D. 控制算法2. 当系统的输出信号与期望的参考信号之间存在差异时,现代控制理论会采取以下哪种策略进行调节?A. 开环控制B. 闭环控制C. 反馈控制D. 前馈控制3. 现代控制系统通常包括哪些基本组成部分?A. 传感器、执行器、控制器B. 输入信号、输出信号、执行器C. 控制器、执行器、参考信号D. 反馈信号、执行器、控制器4. 现代控制理论的主要目标是什么?A. 降低系统效应B. 提高系统稳定性C. 增加系统响应速度D. 最小化系统误差5. 在现代控制系统中,传感器的作用是什么?A. 通过收集系统的反馈信息B. 将输入信号转化为输出信号C. 控制执行器的动作D. 校准控制器的参数二、填空题:6. 现代控制理论中,PID控制器中的比例、积分和微分项分别代表什么?比例项:_______积分项:_______微分项:_______7. 现代控制理论中,系统的稳定性通常通过计算系统的_________来判断。
8. 现代控制理论中,增益裕度是衡量系统稳定性的一个指标,它表示系统输出响应对增益变化的___________。
三、简答题:9. 请简述开环控制和闭环控制的区别。
10. 现代控制系统常用的传感器有哪些?请简要介绍一个传感器的工作原理。
四、分析题:11. 现代控制系统中的反馈环节起到了重要的作用,请你用一个简单的图示来说明反馈控制系统的基本结构。
12. 现代控制理论中,经典PID控制器在某些系统中可能存在不足之处。
请你简要分析当系统存在非线性或时变特性时,经典PID控制器可能出现的问题,并提出解决方案。
结束语:通过本试题,我们回顾了现代控制理论的核心概念、基本组成部分以及控制策略。
掌握现代控制理论对于工程实践具有重要的意义,它可以帮助我们设计和优化各种控制系统,提高系统的性能和稳定性。
希望通过这些试题的训练,您能够对现代控制理论有更深入的理解,并能够在实际应用中灵活运用。
现代控制理论试题B 卷及答案2 1cvcvx ,一、 1 系统 x2xu, y 0 1 x 能控的状态变量个数是 0 1能观测的状态变量个数是cvcvx 。
2 试从高阶微分方程 y3y 8 y 5u 求得系统的状态方程和输出方程(4 分/ 个)解 1 . 能控的状态变量个数是 2,能观测的状态变量个数是 1。
状态变量个数是 2。
⋯ .. (4 分)2.选取状态变量 x 1y , x 2y , x 3y ,可得⋯ .. ⋯ . ⋯⋯ .(1 分)x 1 x 2x 2 x 3⋯.. ⋯. ⋯⋯ . (1 分)x 3 8x 1 3x 35uy x 1写成 0 1 0 0x0 0 1 x 0 u ⋯.. ⋯. ⋯⋯ . (1 分)8 035y 1 0 0 x ⋯.. ⋯. ⋯⋯ . (1 分)二、 1 给出线性定常系统 x( k 1) Ax( k) Bu( k), y(k) Cx (k) 能控的定义。
(3 分)2 1 0 2 已知系统 x0 2 0 x, y 0 1 1 x ,判定该系统是否完0 03全能观? (5 分)解 1 .答:若存在控制向量序列 u (k ), u(k 1), , u(k N 1) ,时系统从第k 步的状态 x(k) 开始,在第 N 步达到零状态,即 x( N ) 0 ,其中 N 是大于0 的有限数,那么就称此系统在第k 步上是能控的。
若对每一个 k ,系统的所有状态都是能控的,就称系统是状态完全能控的,简称能控。
⋯ .. ⋯. ⋯⋯ . (3 分)2.2 1 0CA 0110 2 0 0 2 3⋯⋯⋯.. ⋯⋯⋯.0 0 3(1 分)2 1 0CA20230 2 0 0 4 9 ⋯⋯.. ⋯⋯⋯.(1分)0 0 3C 0 1 1U O CA 0 2 3 ⋯⋯⋯⋯⋯⋯ .. ⋯⋯⋯ . (1 分)CA20 4 9rankU O 2 n ,所以该系统不完全能观⋯⋯ .. ⋯. ⋯⋯ .(2 分)三、已知系统 1、 2 的传递函数分别为g1 (s)s2 1 ,g2s 1 3s 2( s)3s 2 s2s2求两系统串联后系统的最小实现。
《控制系统理论与应用》课程考试卷一、填空(本题共20 分,共20小题,每题各1 分)1、控制系统用来控制某些物理量按照()的规律变化。
2、输出方程是在指定()的情况下,该输出与状态变量间的函数关系式。
3、()表达式是状态方程和输出方程总合,构成对一个系统完整动态描述。
4、对线性定常系统∑(A,B,C),状态观测器存在的充要条件是∑的不可观子系统为()。
5、系统状态的可观性是定性地描述输出y(t)对状态x(t)的()。
6、输出反馈:采用输出矢量y构成线性反馈律H为输出()增益阵。
7、矩阵指数函数逆矩阵=-AtAt ee()。
8、()不增加新状态变量,系统开环与闭环同维,反馈增益阵都是常矩阵。
9、动态补偿器是引入一个()来改善系统性能。
10、状态反馈不改变受控系统的()。
11、输出反馈()受控系统的能控性和能观性。
12、极点配置问题是通过选择反馈增益阵,将()系统的极点恰好配置在根平面上所期望的位,以获得所希望的动态性能。
13、采用状态反馈对系统任意配置极点的充要条件是∑()能控。
14、对完全能控的单输入-单输出系统,通过带动态补偿器的输出反馈实现极点任意配置的充要条件是:(1)∑完全能控;(2)动态补偿器的阶数为()。
15、对系统用从输出到x线性反馈实现闭环极点任意配置充要条件是完全()。
16、传递函数没有零极点()现象,能控能观。
17、对完全能控的单输入-单输出系统,不能采用输出线性反馈来实现闭环系统()的任意配置。
18、所谓传递函数的实现问题,由系统的传递函数矩阵或脉冲响应函数矩阵来建立与其在输入和输出特性上()的状态空间描述。
19、系统平衡状态的渐近稳定性的定义为:如果一个系统被激励后,其储存的能量随着时间的推移逐渐(),到达平衡状态时,能量将达最小值,那么,这个平衡状态是渐近稳定的。
20、全维观测器是指维数和()系统维数相同的观测器。
二、判断题(本题共30 分,共30小题,每题各1 分)1、信息的传递途径是一个自身闭合的环,称为开环。
2012-2013 学年第一学期期末考试试卷《现代控制系统》研究生课程 2012.12姓名 学号 班级 成绩一、 填空(共20分)1. 非线性系统可能有多个平衡点,是因为 可能存在多个极点 。
(2分)2. 如果一个系统是稳定的,但不是渐近稳定而是临界稳定的,则该系统的最终状态可能是 在极限环上震荡 。
(2分)3. 系统的鲁棒性是在外界干扰或模型发生变化时系统性能的保持能力 。
(2分)4. 系统的可观性定义为 对于任一给定的输入u (t ),存在一有限观测时间,使得此期间测量到的输出y (t ),能唯一地确定系统的初始状态x (t0),则称此状态是可观测的 。
线性系统的可观性判据为 可观测性判别矩阵满秩 。
用观测器估计的状态进行状态反馈控制而二者又互不影响是基于 分离 原理(4分)5. 6. 频率响应的输入信号为 正弦信号 。
(2分)7. 线性定常系统的相对稳定性可用 幅值裕度 和 相位裕度 表示。
(2分) 8. 已知一个系统开环传递函数为 1)4)(s 2)(s (s 50G(s)+++=,用MATLAB 语言编程实现该系统的单位负反馈阶跃响应 a=[50],b=[1,7,14,1],sys=tf(a,b) sys1=feedback (sys ,1,-1) (4分)二、分析和计算题(共80分)2.1 考虑如下的质量弹簧阻尼系统,每个质量块的质量分别为1m 和2m ,1k 、2k 和3k 为弹簧的弹性系数,1b 、2b 和3b 为速度阻尼系数,列出在外力1e f 和2e f 的作用下每个质量块的位移分别为1q 和2q ,利用位移和速度作为状态量、位移1q 和2q 为输出,写出运动学方程并表达为状态空间的形式。
(7分)题2.1图2.2 给定性定常系统为:31.75 1.25240000100u ---⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦x x 试设计状态反馈控制器u =-Kx ,希望该系统的闭环极点配置为*14λ=-,*24λ=-和*35λ=-。
现代控制理论考试卷包括答案现代控制理论考试卷及答案西北工业大学考试一试题(卷)2008 -2009 学年第 2 学期学时 32开课学院自动化学院课程现代控制理论一、简答题(对或错, 10 分)(1)描述系统的状态方程不是唯一的。
(2)用独立变量描述的系统状态向量的维数不是唯一的。
(3)对单输入单输出系统,若是 C (sI A) 1 B 存在零极点抵消,则系统必然不可以控也许不可以察看。
(4)对多输入多数出系统,若是( sI A)1B存在零极点抵消,则系统必然不可以控。
(5)李雅普诺夫直接法的四个判判定理中所述的条件都是充分条件。
(6)李雅普诺夫函数是正定函数,李雅普诺夫牢固性是关于系统平衡状态的牢固性。
(7)线性定常系统经过非奇异线性变换后,系统的可控性不变。
(8)用状态反响进行系统极点配置可能会改变系统的可察看性。
(9)经过全维状态察看器引入状态反响来任意配置系统的闭环极点时, 要求系统必定同时可控和可察看。
( 10)对一个线性定常的单输入单输出 5 阶系统,假定系统可控可察看, 经过设计输出至输入的反响矩阵 H 的参数能任意配置系统的闭环极点。
二、 试求下述系统的状态转移矩阵(t )和系统状态方程的解 x 1和2。
(15分)(t)x (t)x 1 (t ) 0 1 x 1(t) 2x 2 (t )2 3x 2 (t) u(t)x 1 (0) 0 , u(t)e t, t 0x 2 (0)1三、 设系统的传达函数为y(s) 10。
试用状 u( s)s(s 1)(s 2)态反响方法,将闭环极点配置在-2,- 1+j ,- 1-j 处,并写出闭环系统的动向方程和传达函数。
(15 分)四、 已知系统传达函数Y(s)2s 2 ,试求系统可观U (s)s 4s3标准型和对角标准型,并画出系统可观标准型的状态变量图。
(15 分)五、已知系统的动向方程为xa 2x1u ,试确定1 0 1y b 0 xa,b 值,使系统完好可控、完好可观。
2012年现代控制理论考试试卷一、(10分,每小题1分)试判断以下结论的正确性,若结论是正确的,( √ )1. 由一个状态空间模型可以确定惟一一个传递函数。
( √ )2. 若系统的传递函数不存在零极点对消,则其任意的一个实现均为最小实现。
( × )3. 对一个给定的状态空间模型,若它是状态能控的,则也一定是输出能控的。
( √ )4. 对线性定常系统x Ax =&,其Lyapunov 意义下的渐近稳定性和矩阵A 的特征值都具有负实部是一致的。
( √ )5.一个不稳定的系统,若其状态完全能控,则一定可以通过状态反馈使其稳定。
( × )6. 对一个系统,只能选取一组状态变量;( √ )7. 系统的状态能控性和能观性是系统的结构特性,与系统的输入和输出无关;( × )8. 若传递函数1()()G s C sI A B -=-存在零极相消,则对应的状态空间模型描述的系统是不能控且不能观的;( × )9. 若一个系统的某个平衡点是李雅普诺夫意义下稳定的,则该系统在任意平衡状态处都是稳定的;( × )10. 状态反馈不改变系统的能控性和能观性。
二、已知下图电路,以电源电压u(t)为输入量,求以电感中的电流和电容中的电压作为状态变量的状态方程,和以电阻R2上的电压为输出量的输出方程。
(10分)解:(1)由电路原理得:112212111122211111LL cLL ccL Ldi Ri u udt L L Ldi Ri udt L Ldui idt c c=--+=-+=-222R Lu R i=1122111122210110011L LL Lc cRi iL LLRi i uL Lu uc c⎡⎤--⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=-+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎢⎥⎣⎦ggg[]122200LR Lciu R iu⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦二.(10分)图为R-L-C电路,设u为控制量,电感L上的支路电流和电容C上的电压2x为状态变量,电容C上的电压2x为输出量,试求:网络的状态方程和输出方程,并绘制状态变量图。
2012-2013 学年第一学期期末考试试卷
《现代控制系统》研究生课程 2012.12
姓名 学号 班级 成绩
一、 填空(共20分)
1. 非线性系统可能有多个平衡点,是因为 可能存在多个极点 。
(2分)
2. 如果一个系统是稳定的,但不是渐近稳定而是临界稳定的,则该系统的最终状态
可能是 在极限环上震荡 。
(2分)
3. 系统的鲁棒性是在外界干扰或模型发生变化时系统性能的保持能力 。
(2分)
4. 系统的可观性定义为 对于任一给定的输入u (t ),存在一有限观测时间,使得
此期间测量到的输出y (t ),能唯一地确定系统的初始状态x (t0),则称此状态是可观测的 。
线性系统的可观性判据为 可观测性判别矩阵满秩 。
用观测器估计的状态进行状态反馈控制而二者又互不影响是基于 分离 原理(4分)
5. 6. 频率响应的输入信号为 正弦信号 。
(2分)
7. 线性定常系统的相对稳定性可用 幅值裕度 和 相位裕度 表示。
(2分) 8. 已知一个系统开环传递函数为 1)
4)(s 2)(s (s 50
G(s)+++=
,用MATLAB 语言编
程实现该系统的单位负反馈阶跃响应 a=[50],b=[1,7,14,1],sys=tf(a,b) sys1=feedback (sys ,1,-1) (4分)
二、分析和计算题(共80分)
2.1 考虑如下的质量弹簧阻尼系统,每个质量块的质量分别为1m 和2m ,1k 、2k 和3k 为弹簧的弹性系数,1b 、2b 和3b 为速度阻尼系数,列出在外力1e f 和
2e f 的
作用下每个质量块的位移分别为1q 和2q ,利用位移和速度作为状态量、位移1q 和
2q 为输出,写出运动学方程并表达为状态空间的形式。
(7分)
题2.1图
2.2 给定性定常系统为:
3
1.75 1.2524
0000
1
00u ---⎡⎤⎡⎤
⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦
x x 试设计状态反馈控制器u =-Kx ,希望该系统的闭环极点配置为*
1
4λ=-,
*
24λ=-和*35λ=-。
(7分)
2.3 如下定常非线性系统
()2
12122
2211122212
2cos 21sin 3x x x x u x x x x x x y x x u u ⎧=++⎪⎪=+++⎨⎪=++-⎪⎩ 给出该系统关于
=x 0 的线性化表达式。
(7分)
2.4 两道稳定性分析的题目。
(共12分) (1)判断下述系统的原点平衡状态
0e =x 是否为大范围渐近稳定。
(6分)
12
22112
x x x x x x ⎧⎨--⎩== (2)解出如下一阶系统
34x x x =-+
的原点平衡,并分析它们的稳定性。
(6分)
2.5 考虑连续系统模型
[]01023110[0]⎧⎡⎤⎡⎤
⎪⎢⎥
⎢⎥--⎣⎦⎣⎦⎨
⎪⎩
x =x +u y =x +u
进行离散化,取采样时间
0.5s s T =,给出离散化的差分方程表达式,并给出系数
矩阵。
并分析选取采样时间 s T 的大小对离散化系统的影响。
(7分)
2.6 在分析非线性时变系统(非自治系统)和非线性定常系统(自治系统)的稳定性时,可分别应用哪两个定理,并分别给出这两个定理的描述。
(5分)
2.7 设一闭环系统的开环传递函数为1)
s 0.5)(s 0.5)(s (s 1
s G(s)2
++-++=
,其奈奎斯特(Nyquist)曲线如下图所示,判断该闭环系统的稳定性。
(6分)
Real Axis
I m a g i n a r y A x
i s
题2.7图 N=-1 P=1 N 不等于P 所以不稳定
2.8已知一个系统如下图所示,求Y (s )/r (s ) [注:可手工计算或用MATLAB 编程等任意
方法完成]。
(8分)
题2.8图
2.9.一个开环系统传递函数10)
1)(s (s 2)
2(s G(s)+++=
,当比例系数K p =10,积分系数K i =20
时,(1)求经P 控制器校正后的闭环系统传递函数和单位阶跃响应稳态误差;(2)经PI 控制器校正后的闭环系统传递函数和单位阶跃响应稳态误差。
(10分)
2.10.一个开环系统P(s)的波德(Bode)图如下图实线所示,经一个补偿器C(s)校正得到L(s)=P(s)C(s),而L(s)波德图如下图虚线所示,试判定C(s)是
20
s 5
s ++还是5
s 20
s ++,并说明理由。
(6分)
M a g n i t u d e (d B
)
10
10
101010
10
P h a s e (d e g )
Bode Diagram
Frequency (rad/sec)
题2.10图
2.11.一个如下的控制系统:
当增益K 变化时用sisotool 工具作图,得到下图(a)和(b )所代表两个不同K 值的根轨迹图和波德图(左侧为根轨迹图、左侧为波德图),请在同一图中定性画出(a)和(b )情形下的单位阶跃响应,并说明哪一种情形的超调量大。
(5分)。