工程测量GPS网平差方法总结
- 格式:doc
- 大小:27.50 KB
- 文档页数:9
FJ-3省道S229南坑至源头段二级公路改建工程GPS静态控制测量网平差报告萍乡公路勘察设计院二○一一年九月目录一、GPS控制点成果表 (1)二、GPS控制点网示意图 (1)三、GPS控制网平差报告……………………………………1~4一、G PS控制点成果表序号点号坐标(米) 高程(米)H备注X Y1 G1 3044783.262 483918.997 165.982 源并去南坑公路右侧钢筋砼、与D1通视(K33+655)左侧4米处。
一级GPS静态点2 G2 3045336.142 485138.500 262.207 源并去南坑公路右侧钢筋砼、与D4通视(K32+020)左侧15米处。
一级GPS静态点3 G3 3046850.282 487744.256 159.284 南坑镇七宝村新尤组水泥路中缝钢钉、与D13通视(K28+483)左侧10米处。
一级GPS静态点4 G4 3047703.462 490103.347 158.428 南坑镇大岭路中国移动营业厅、彭红远家5楼顶油漆刻石、与D16通视。
一级GPS静态点5 D1 3044576.685 483709.363 138.070 S314公路弯道边坡上钢筋砼、与D1通视(K33+760)左侧254米处。
RTK加密点6 D2 3044924.025 484045.621 178.946 源并去南坑公路右侧水泥路中缝钢钉与D3通视(K33+460)左侧6米处。
RTK加密点7 D3 3045175.043 484371.238 193.391 源并去南坑公路右侧水泥路中缝钢钉与D4通视(K32+919)左侧97米处。
RTK加密点8 D4 3045128.427 484796.609 215.246 白竺乡崇源村花石组卢富德家2楼顶油漆刻石、与G2通视(K32+423)127米处。
RTK加密点9 D5 3045557.232 485595.899 242.426 源并去南坑公路右侧钢筋砼、与D6通视(K31+524)左侧15米处。
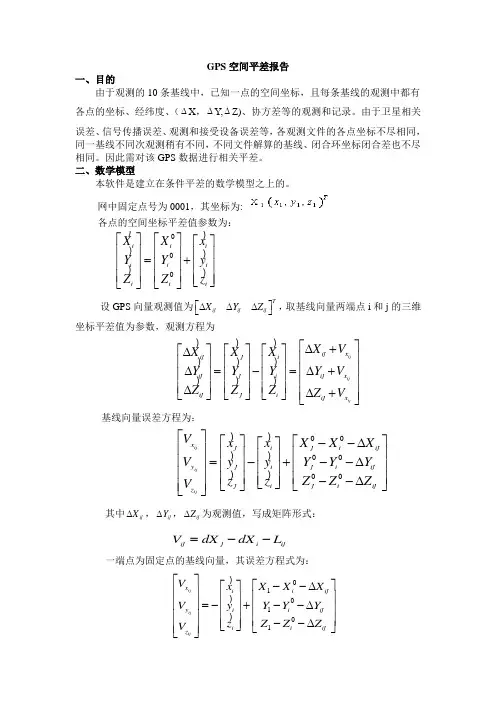
GPS 空间平差报告一、目的由于观测的10条基线中,已知一点的空间坐标,且每条基线的观测中都有各点的坐标、经纬度、(∆X ,∆Y ,∆Z)、协方差等的观测和记录。
由于卫星相关误差、信号传播误差、观测和接受设备误差等,各观测文件的各点坐标不尽相同,同一基线不同次观测稍有不同,不同文件解算的基线、闭合环坐标闭合差也不尽相同。
因此需对该GPS 数据进行相关平差。
二、数学模型本软件是建立在条件平差的数学模型之上的。
网中固定点号为0001,其坐标为:各点的空间坐标平差值参数为:000i i ii i i i i i X X x Y Y y Z Z z ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦ 设GPS 向量观测值为Tij ijij X Y Z ⎡⎤∆∆∆⎣⎦,取基线向量两端点i 和j 的三维坐标平差值为参数,观测方程为ij ijij ij x ij j i ij j i ij x ij j i ij x X V X X X Y Y Y Y V Z Z Z Z V ⎡⎤∆+⎡⎤⎡⎤⎡⎤∆⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥∆=-=∆+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥∆∆+⎣⎦⎣⎦⎣⎦⎢⎥⎣⎦基线向量误差方程为:000000ij ij ijxj i j i ij y j i j i ij j i j i ij z V x x X X X V y y Y Y Y z z Z Z Z V ⎡⎤⎡⎤⎡⎤--∆⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=-+--∆⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥--∆⎣⎦⎣⎦⎣⎦⎢⎥⎣⎦其中ij X ∆,ij Y ∆,ij Z ∆为观测值,写成矩阵形式:ij ji ij V dXdX L =--一端点为固定点的基线向量,其误差方程式为:010101ij ij ijxi i ij y i i ij i i ij z V x X X X V y Y Y Y z Z Z Z V ⎡⎤⎡⎤--∆⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=-+--∆⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥--∆⎣⎦⎣⎦⎢⎥⎣⎦写成矩阵形式:11i i i V dX l =-+当网中有m 个待定点、n 条基线时,GPS 网的误差方程为3331313n m n m nV Bx l ⨯⨯⨯⨯=-法方程为:0TB PV =0T TB PBx B Pl -=通过解法方程,可得到参数向量x的唯一解:将解得的x带入误差方程,可求得改正数V 的值,从而平差结果为:L L V =+X X x =+ij ij ij X X X V ∆∆=∆+精度评定:20/[33(1)]T V P V m n δ=--平差未知数dX 的方差估值为:()12Ti D AP A δ-=式中21x P D δ-∆=软件说明在GPS 网平差数据处理中涉及大量的矩阵运算和方程组解算,尤其是矩阵的求逆和相乘,用高级编程语言在处理这些运算时要编写大量的循环语句;如果希望通过高级编程语言实现图形绘制和精度分析等,编程工作量就会更大。
GPS控制网平差总结报告GPS控制网是指由一组GPS基准站组成的网络,用于测量和控制大范围区域内的GPS定位精度。
GPS控制网平差是对GPS观测数据进行处理和分析,得到每个GPS站点的坐标和高程的过程。
该报告对GPS控制网平差的基本原理、流程以及常用的算法进行了总结。
报告首先介绍了GPS控制网平差的基本原理。
GPS观测数据包括卫星观测值和接收机历元数据,可以通过基线解算得到不同站点之间的相对位置关系。
基于这些相对位置关系,可以通过平差方法计算出每个站点的绝对坐标和高程。
报告还列举了常用的GPS控制网平差算法。
最常用的算法包括最小二乘法、加权最小二乘法和区域平差法。
最小二乘法通过最小化观测值与模型预测值之间的残差来求解平差参数。
加权最小二乘法则考虑观测数据的权重,将不同类型的数据进行加权处理。
区域平差法则将整个控制网分成若干个区域,分别进行平差计算,再通过闭合差控制各个区域之间的一致性。
最后,报告总结了GPS控制网平差的应用和挑战。
GPS控制网平差在地理测量、地质灾害监测和测绘工程等领域具有重要应用价值。
然而,由于GPS观测数据本身存在误差和不确定性,平差算法和数据处理过程中需要考虑到这些因素,以提高平差结果的准确性和可靠性。
综上所述,GPS控制网平差是一种重要的测量和控制技术,可以用于获取大范围区域内的GPS定位精度。
通过了解GPS控制网平差的基本原理、流程和常用算法,可以更好地应用该技术解决实际问题。
然而,在实际应用中仍然需要不断改进算法和数据处理方法,以提高平差结果的精度和可靠性。
第39卷第24期2008年12月 人 民 长 江Yangtze R i ve rVol .39,No .24Dec.,2008收稿日期:2008-10-20基金项目长江水利委员会科研与技术创新项目资助“高精度G S 技术在超长隧洞及大型水利工程中的应用研究”研究课题作者简介刘祖强,男,长江水利委员会长江岩土工程总公司(武汉),高级工程师。
文章编号:1001-4179(2008)24-0047-02工程GPS 测量与地面观测值混合处理平差模型刘祖强 戴立耘 田雪冬 贾进科(长江水利委员会长江岩土工程总公司(武汉),湖北武汉430010)摘要:提出了工程GPS 测量与地面观测值混合处理的一种实用平差模型。
即把GPS 基线向量直接转化为与地面观测值对应的直角坐标系统中的距离观测值,并考虑尺度变换因子,这样就可方便地把GPS 基线向量和地面观测值进行混合平差.通过对多个工程GPS 测量控制网的数据处理案例分析,说明提出的模型平差结果与其他严密混合平差模型计算结果一致,且点位精度评价更接近实际。
此外,模型还可实现工程G PS 测量控制网的优化设计。
关 键 词:GPS 测量;地面观测值;平差模型;优化设计中图分类号:P228.4 文献标识码:A1 概述G PS 三维基线向量与地面网混合平差,在三维参心空间直角坐标系统和三维参心大地坐标系统中,可以得到严密的计算成果。
其思想是把W G S -84坐标系统下的三维基线通过四参数转化到三维参心空间直角坐标系统,把地面观测值也转化到三维参心空间直角坐标系统,统一基准后以点坐标为参数,混合平差。
特别是在三维参心大地坐标系统中,可以把平面坐标信息分量和高程位置坐标分量方便地区分开,但三维联合平差,必须知道较准确的大地高或者是大地水准面差距。
故在工程测量中,为避开这个目前尚难以解决的实际问题,工程GPS 测量与地面观测值混合平差时,人们常常采用在二维坐标系中进行的办法。
GPS网平差的类型和作用
一、网平差的类型
无约束平差
定义:gps网的无约束平差指的是在平差时不引入会造成GPS网产生由非观测量所引起的变形的外部起算数据。
常见的GPS网的无约束平差,一般是在平差时没有起算数据或没有多余的起算数据。
约束平差
定义:GPS网的约束平差指的是平差时所采纳的观测值完全是GPS 观测值(即GPS基线向量),而且,在平差时引入了使得GPS网产生由非观测量所引起的变形的外部起算数据。
联合平差
定义:GPS网的联合平差指的是平差时所采纳的观测值除了GPS观测值以外,还采纳了地面常规观测值,这些地面常规观测值包括边长、方向、角度等观测值等。
二、无约束平差的作用
评定GPS网的内部符合精度,发觉和剔除GPS观测值中可能存在的粗差,得到GPS网中各个点在WGS-84系下经过了平差处理的三维空间直角坐标,为将来可能进行的高程拟合,供应经过了平差处理的大地高数据
三、平差结果的质量评定
指标:相邻点距离中误差
1.单位权方差的检验2.基线改正数的检验3.已知坐标的检验。
GPS D级静态网平差精度分析摘要:随着卫星定位技术的不断成熟,也在多个行业得到普遍的应用。
对其精度分析研究也显得尤为重要,以给经济等方面带来更深远的意义,因此本文结合广西全州东山GPS D级控制网的应用实践,分析了GPS D级控制网相关精度的分析情况,以提供参考价值。
关键词:GPS;D级静态网;平差精度1 项目概况广西全州东山GPS D级控制网,由广西二一五地质队进行施工完成。
本次项目中本次利用GPS技术施测D级GPS网6点,充分利用原有的四等三角网中的点位,以广西测绘局施测的C级GPS控制点作为本网的起算数据,应用中国-DONGSHAN-111坐标系。
1.1坐标系统基本规定坐标系名称:中国-DONGSHAN-111椭球长半轴a:6378245.000000椭球扁率f:1/298.300000投影名称:高斯三度带投影尺度:1.000000 投影高:0.000000X加常数:0.000000 Y加常数:500000.000000平均纬度:000:00:00.000000N中央子午线:111:00:00.000000ED级点高程为二等水准,经过检验,精度达到四等水准精度的要求。
1.2 作业技术依据《全球定位系统(GPS)测量规范》(GB/T18314-2001);《全球定位系统城市测量技术规程》(CJJ 73—97);《测绘技术设计规定》(CH/T1004-2005);《国家三、四等水准测量规范》(GB 12898—91);2GPS控制网的布设和数据观测2.1GPS控制网的布设本D级GPS网控制的测区面积为50平方公里相对来说并不大,除矿区外,还有村镇不相接其它区域,整体上其形状非常不规则,交通不是很方便,属于边远高寒山区。
这决定了其网形需坚强、点位精度分布均匀及点位密度适当,平面精度为D级GPS,同时高程拟合精度要达到四等水准测量的精度要求。
在此基础上,D级GPS控制网的网状应设计为几何图形,且均为三角形,整体上表现为多边形。

GPS网平差进行GPS网平差的目的主要有三个:(1)消除由观测量和已知条件中存在的误差所引起的GPS 网在几何上的不一致。
包括闭合环闭合差不为0;复测基线较差不为0;通过由基线向量所形成的导线,将坐标由一个已知点传算到另一个已知点的符合差不为0等。
通过网平差,可以消除这些不一致.(2)改善GPS网的质量,评定GPS网的精度。
通过网平差,可得出一系列可用于评估GPS网的精度指标,如观测值改正数、观测值验后方差等等。
结合这些精度指标,还可以设法确定出可能存在粗差或质量不佳的观测值,并对它们进行相应的处理,从而达到改善网的质量的目的.(3)确定GPS网中点在指定参照系下的坐标以及其他所需参数的估值。
通常,无法通过某个单一类型的网平差过程来达到上述三个目的,而必须分阶段采用不同类型的网平差方法。
根据进行网平差时所采用的观测量和已知条件的类型和数量,可将网平差分为最小约束平差/自由网平差、约束平差和联合平差三种类型。
这三种类型网平差除了都能消除由于观测值和已知条件所引起的网在几何上的不一致外,还具有各自不同的功能。
无约束平差能够被用来评定网的内符合精度和探测处理粗差,而约束平差和联合平差则能够确定点在制定参照系下的坐标。
根据进行平差时所采用坐标系的类型,GPS网平差还可以分为三维平差和二维平差.在使用数据处理软件进行GPS网平差时,需要进行以下四个步骤:1、基线向量提取2、三维无约束平差3、约束平差/联合平差4、质量分析与控制基线向量提取:要进行GPS网平差,首席必须提取基线向量,构建GPS基线向量网.提取基线向量时,需要遵循以下几项原则:(1)必须选取相互独立的基线,若选取了不相互独立的基线,则平差结果会与真实的情况不相符合.(2)所选取的基线应构成闭合的几何图形.(3)选取质量好的基线向量,基线质量好坏可以依据RMS、RDOP、Ratio、同步环闭合差、异步环闭合差及重复基线较差来判定。
(4)选取能构成边数较少的异步环的基线向量.(5)选取边长较短的基线向量.三维无约束平差GPS网的最小约束平差/自由网平差中所采用的观测量完全为GPS基线向量,平差通常在与基线向量相同的地心地固系下进行。
GPS网平差的基本原理与实际工作中的应用GPS(全球定位系统)是一种通过卫星信号来确定地球上特定位置的技术。
它在现代社会中已广泛应用于导航、地图制作、航空航海等领域。
而GPS网平差则是指使用GPS观测资料来计算大地测量网的平差结果,实现对测量数据的处理和分析。
本文将介绍GPS网平差的基本原理以及在实际工作中的应用。
一、GPS网平差的基本原理GPS网平差的基本原理是通过测量信号的传播时间来计算位置坐标。
当GPS 接收器接收到来自卫星的信号时,它会测量信号的传播时间,并将信号的传播时间与卫星发出信号的时间进行比较,从而确定位置。
这个基本过程可以简单地分为四个步骤:接收,计算,比较和定位。
首先,GPS接收器接收到来自卫星的信号。
每颗卫星都会发出一个精确的时钟信号,并携带有关卫星位置和运动的信息。
接收器会同时接收多颗卫星的信号,以获得更准确的定位结果。
接下来,接收器将测量到的信号传播时间与卫星发出信号的时间进行比较。
由于信号的传播速度是已知的(接近光速),通过测量传播时间可以计算出信号的传播距离。
然后,接收器将计算出的传播距离和卫星位置的信息进行比较。
通过三个或更多卫星的信息,接收器可以确定自身的位置。
这个过程称为三角定位,基于三个或更多卫星的信号传播距离的交点来确定位置。
最后,接收器通过计算和比较过程来进行位置的定位。
接收器会使用复杂的数学算法来确定最准确的位置坐标,并将结果显示在接收器上或传输到其他设备上进行处理。
二、GPS网平差在实际工作中的应用GPS网平差在实际工作中有着广泛的应用,包括大地测量、工程测量、导航、地图制作等领域。
下面将分别介绍这些应用的具体情况。
1. 大地测量:GPS网平差在大地测量中起到了至关重要的作用。
传统的大地测量需要使用传统的测量仪器进行测量,而GPS网平差可以通过卫星信号直接进行测量,大大提高了测量的效率和准确度。
通过使用GPS网平差技术,测量人员可以更准确地确定测量点的坐标,而且不受地理位置和环境的限制。
《卫星定位城市测量规范》CJJ/T 73—2010GPS网的主要技术要求表1-1注:边长小于200米时,边长中误差≤2cm。
二、三、四等网相邻点最小边长不宜小于平均边长的1/2,最长边长不宜超过平均边长的2倍。
一、二级网最大边长可在平均边长的基础上放宽1倍。
异步环或附和线路边数的规定表1-2GPS 测量各等级作业的基本技术要求 表1-4各项限差规定 σ())((22bd a +=σ采用表1-1加乘常数) 同步环闭合差限差σω53x ≤, σω53y ≤, σω53z ≤, σω53≤ 同步环只计算三边同步环,))((22bd a +=σ,d 按照该等级平均边长计算,ω—环闭合差,222z y x ωωωω++=异步环闭合差限差σωn 2x ≤, σωn 2y ≤, σωn 2z ≤, σωn 32≤n —独立环的边数,d 按照该等级平均边长计算,))((22bd a +=σ,ω—环闭合差,222z y x ωωωω++=重复基线限差复测基线的长度较差ds ,同一基线不同时段较差应满足 σ23ds ≤(σ按照实际边长计算)三维无约束平差中,基线分量的改正数(X V ∆,Y V ∆,Z V ∆)绝对值应满足下列要求σ∆3V X ≤,σ∆3V Y ≤,σ∆3V Z ≤))((22bd a +=σd 按照基线边长计算约束平差中,基线分量的改正数与经过剔除粗差后的无约束平差结果的同一基线相应改正数较差应满足下列要求(或者进行已知点检查,已知点点位变化相对于约束点的边长相对中误差不应低于表1-1规定的上一等级控制网中最弱边相对中误差)σ∆2dV X ≤,σ∆2dV Y ≤,σ∆2dV Z ≤))((22bd a +=σd 按照基线边长计算《工程测量规范》GB50026-2007GPS 网的主要技术要求 表2-1控制网测量中误差m ≤σ⎥⎦⎤⎢⎣⎡=n WW N31m ,N 为控制网中异步环的个数,n 为异步环边数,W 为异步环全长闭合差。
目录第一章项目属性 (1)第二章坐标系统 (1)第三章GPS网图 (2)第四章基线简表 (2)第五章基线祥解 (3)5.1 GPS1→GPS2 (3)5.2 GPS1→GPS3 (6)5.3 GPS1→GPS4 (9)5.4 GPS2→GPS3 (12)5.5 GPS2→GPS4 (15)5.7 GPS3→GPS4 (18)第六章重复基线 (21)第七章同步环 (21)第八章异步环 (22)第九章基线总结 (22)9.1 相对误差最大值 (22)9.2 绝对误差最大值 (22)第十章WGS-84三维无约束平差 (23)10.1 平差参数 (23)10.2 平差基线边 (23)10.3 T 检验列表 (23)10.4 自由网平差坐标 (24)第十一章WGS-84三维约束平差 (24)11.1 平差参数 (24)11.2 平差基线边 (24)10.3 三维约束平差坐标 (25)第十二章二维平差 (25)12.1 平差参数 (25)12.2 平面距离平差值 (26)12.3 平面坐标 (26)12.4 最弱点平面中误差 (26)第十三章高程拟合 (27)13.1 平差参数 (27)13.2 拟合坐标 (27)第十四章平差总结 (27)14.1 平面距离平差值 (27)14.2 最终坐标平差值 (28)14.3 最弱点平面中误差 (28)14.4 三维约束平差坐标 (28)第一章项目属性项目名称:控制测量实习E级GPS控制网项目单位:湖南城市学院施工单位:1002601班第三组负责人:翟彬彬控制网等级:E级测量员:翟彬彬、黄宇、谷荣明、杨光叶、吴光会、李洪宇、黄琛计算员:翟彬彬开始日期:2013/9/13结束日期:2013/9/16备注:第二章坐标系统坐标系名称:中国-北京54-28N-112E椭球长半轴 a:6378245.000000椭球扁率 f:1/298.300000投影名称: 高斯3度带投影尺度:1.000000 投影高:0.000000X加常数:0.000000 Y加常数:500000.000000平均纬度:028:00:00.000000N中央子午线:112:00:00.000000E第三章GPS网图第四章基线简表第五章基线祥解5.1 GPS1→GPS2固定站未知站------------------------------------------------------------------------ 站名: GPS1 GPS2 WGS84 天线高: 1.606 m 1.725 m WGS84 纬度: 28:32:18.00331N 28:32:55.74308N WGS84 经度: 112:22:35.25932E 112:22:38.18864E WGS84 高程: 64.135 m 56.352 m观测数据类型:L1 & L2开始时间:2013年09月13日 04:24:15结束时间:2013年09月13日 06:30:15历元间隔:77795904 秒历元数 127卫星号 1 17 7 28 20 8 9 11 32 4开始 0 0 0 0 0 0 0 0 7 53结束 115 126 52 126 126 105 96 65 113 126基准卫星:28三差解-----------------------------------------------------------------------MEASUREMENTS : 1684 REJECTED : 32 RMS : 0.0134Baseline : 143.5848 -549.1371 1017.7395 1165.3162Sta. name WGS84_Lat. WGS84_Lon. WGS84_Alt.起始点 : 28°32'18.0033" N 112°22'35.2593" E 64.1347终止点 : 28°32'55.7729" N 112°22'38.0653" E 56.3524Sta. name WGS84_X WGS84_Y WGS84_Z 起始点 : -2134765.7047 m 5185375.4279 m 3029134.3183 m终止点 : -2134622.1199 m 5184826.2908 m 3030152.0579 m Variance covariance matrix:x y zx 0.160834E -0.159928E 0.098561Ey 0.260490E -0.154603Ez 0.479630E------------------------- 修复周跳----------------------------- 双差浮点解----------------------------------------------------------------------- MEASUREMENTS : 1686 REJECTED : 13 RMS : 0.0138Baseline : 141.0689 -551.8025 1017.1362 1165.7412Sta. name WGS84_Lat. WGS84_Lon. WGS84_Alt.起始点 : 28°32'18.0033" N 112°22'35.2593" E 64.1347终止点 : 28°32'55.7790" N 112°22'38.1882" E 54.7404Sta. name WGS84_X WGS84_Y WGS84_Z 起始点 : -2134765.7047 m 5185375.4279 m 3029134.3183 m终止点 : -2134624.6358 m 5184823.6254 m 3030151.4546 m Variance covariance matrix:x y zx 0.078850E 0.046589E -0.001572Ey 0.052518E 0.010426Ez 0.012030E卫星号模糊度方差模糊度方差1 -2032.0 0.0159 -1583.0 0.012417 -3001.0 0.0122 -2338.0 0.00957 -7814.0 0.0132 -6088.0 0.010320 -7438.1 0.0189 -5795.0 0.01478 -4704.0 0.0124 -3665.0 0.00969 -5083.0 0.0138 -3960.0 0.010811 -197.1 0.0219 -153.1 0.017132 -4211.1 0.0252 -3276.1 0.01964 -7628.9 0.0197 -5901.9 0.0154---------------------整周模糊度分解-----------------------------****** Ratio = 61.1 ******1 0.0 -1.0 -2032.0 0.016 | 0.0 0.0 -1583.0 0.01217 0.0 0.0 -3001.0 0.012 | 0.0 0.0 -2338.0 0.0107 0.0 0.0 -7814.0 0.013 | 0.0 0.0 -6088.0 0.01020 0.0 0.0 -7438.0 0.019 | 0.0 0.0 -5795.0 0.0158 0.0 0.0 -4704.0 0.012 | 0.0 0.0 -3665.0 0.0109 0.0 0.0 -5083.0 0.014 | 0.0 0.0 -3960.0 0.01111 0.0 0.0 -197.0 0.022 | 0.0 0.0 -153.0 0.01732 0.0 0.0 -4211.0 0.025 | 0.0 0.0 -3276.0 0.0204 0.0 0.0 -7629.0 0.020 | 0.0 0.0 -5902.0 0.015双差整数解----------------------------------------------------------------------- MEASUREMENTS : 1687 REJECTED : 12 RMS : 0.0143Baseline : 141.0562 -551.8129 1017.1340 1165.7426Sta. name WGS84_Lat. WGS84_Lon. WGS84_Alt.起始点 : 28°32'18.0033" N 112°22'35.2593" E 64.1347终止点 : 28°32'55.7790" N 112°22'38.1888" E 54.7352Sta. name WGS84_X WGS84_Y WGS84_Z 起始点 : -2134765.7047 m 5185375.4279 m 3029134.3183 m终止点 : -2134624.6485 m 5184823.6150 m 3030151.4523 m Variance covariance matrix:x y zx 0.002963E -0.001920E -0.000568Ey 0.004162E 0.000992Ez 0.001550E------基线处理详解完毕-----5.2 GPS1→GPS3固定站未知站------------------------------------------------------------------------ 站名: GPS1 GPS3 WGS84 天线高: 1.606 m 1.540 m WGS84 纬度: 28:32:18.00331N 28:34:10.09600N WGS84 经度: 112:22:35.25932E 112:20:51.06211E WGS84 高程: 64.135 m 52.760 m观测数据类型:L1 & L2开始时间:2013年09月13日 04:22:45结束时间:2013年09月13日 06:29:45历元间隔:77795904 秒历元数 128卫星号 1 17 7 28 8 9 11 32 20 4开始 0 0 0 0 0 0 0 9 21 52结束 111 127 53 127 106 97 63 79 127 127基准卫星:28三差解----------------------------------------------------------------------- MEASUREMENTS : 1232 REJECTED : 86 RMS : 0.0907Baseline : 3254.9010 -437.2161 3032.1496 4469.8400Sta. name WGS84_Lat. WGS84_Lon. WGS84_Alt.起始点 : 28°32'18.0033" N 112°22'35.2593" E 64.1347终止点 : 28°34'10.0172" N 112°20'50.6410" E 70.5766Sta. name WGS84_X WGS84_Y WGS84_Z 起始点 : -2134765.7047 m 5185375.4279 m 3029134.3183 m终止点 : -2131510.8037 m 5184938.2118 m 3032166.4680 m Variance covariance matrix:x y zx 0.126233E -0.113511E 0.063524Ey 0.166403E -0.116755Ez 0.428541E------------------------- 修复周跳----------------------------- 双差浮点解----------------------------------------------------------------------- MEASUREMENTS : 658 REJECTED : 5 RMS : 0.0095Baseline : 3250.8681 -456.7507 3025.5400 4464.3764Sta. name WGS84_Lat. WGS84_Lon. WGS84_Alt.起始点 : 28°32'18.0033" N 112°22'35.2593" E 64.1347终止点 : 28°34'10.0855" N 112°20'51.0515" E 52.8949Sta. name WGS84_X WGS84_Y WGS84_Z 起始点 : -2134765.7047 m 5185375.4279 m 3029134.3183 m终止点 : -2131514.8367 m 5184918.6772 m 3032159.8584 mVariance covariance matrix:x y zx 0.189923E -0.258205E -0.160006Ey 3.933237E 1.924419Ez 0.962913E卫星号模糊度方差模糊度方差17 -297.0 0.0176 -232.0 0.013732 -32243.1 0.0806 -25124.1 0.062620 2895566.9 0.0507 2265357.0 0.039332 -32243.1 0.0806 -25124.1 0.0626----------------------整周模糊度分解-----------------------------****** Ratio = 48.1 ******17 0.0 1.0 -297.0 0.018 | 0.0 0.0 -232.0 0.01432 0.0 0.0 -32243.0 0.081 | 0.0 0.0 -25124.0 0.06320 0.0 0.0 2895567.0 0.051 | 0.0 0.0 2265357.0 0.03932 0.0 0.0 -32243.0 0.081 | 0.0 0.0 -25124.0 0.063双差整数解-----------------------------------------------------------------------MEASUREMENTS : 658 REJECTED : 5 RMS : 0.0105Baseline : 3250.8521 -456.7606 3025.5383 4464.3647Sta. name WGS84_Lat. WGS84_Lon. WGS84_Alt.起始点 : 28°32'18.0033" N 112°22'35.2593" E 64.1347终止点 : 28°34'10.0855" N 112°20'51.0522" E 52.8914Sta. name WGS84_X WGS84_Y WGS84_Z起始点 : -2134765.7047 m 5185375.4279 m 3029134.3183 m终止点 : -2131514.8526 m 5184918.6673 m 3032159.8567 m Variance covariance matrix:x y zx 0.009304E -0.006352E -0.007231Ey 0.014759E 0.000997Ez 0.013542E------基线处理详解完毕-----5.3 GPS1→GPS4固定站未知站------------------------------------------------------------------------ 站名: GPS1 GPS4 WGS84 天线高: 1.606 m 1.727 m WGS84 纬度: 28:32:18.00331N 28:34:12.18558N WGS84 经度: 112:22:35.25932E 112:20:10.52650E WGS84 高程: 64.135 m 37.092 m观测数据类型:L1 & L2开始时间:2013年09月13日 04:22:45结束时间:2013年09月13日 06:29:45历元间隔:77795904 秒历元数 128卫星号 1 17 7 28 8 9 11 20 32 4开始 0 0 0 0 0 0 0 7 9 52结束 117 127 53 127 106 97 67 127 114 127基准卫星:28三差解----------------------------------------------------------------------- MEASUREMENTS : 1689 REJECTED : 37 RMS : 0.0326Baseline : 4291.1711 -74.2000 3075.7920 5280.1658Sta. name WGS84_Lat. WGS84_Lon. WGS84_Alt.起始点 : 28°32'18.0033" N 112°22'35.2593" E 64.1347终止点 : 28°34'12.1655" N 112°20'10.2974" E 40.3757Sta. name WGS84_X WGS84_Y WGS84_Z 起始点 : -2134765.7047 m 5185375.4279 m 3029134.3183 m终止点 : -2130474.5337 m 5185301.2279 m 3032210.1104 m Variance covariance matrix:x y zx 0.163295E -0.159814E 0.100846Ey 0.259202E -0.154211Ez 0.483687E------------------------- 修复周跳----------------------------- 双差浮点解----------------------------------------------------------------------- MEASUREMENTS : 1501 REJECTED : 86 RMS : 0.0139Baseline : 4287.7723 -81.3088 3073.6376 5276.2534Sta. name WGS84_Lat. WGS84_Lon. WGS84_Alt.起始点 : 28°32'18.0033" N 112°22'35.2593" E 64.1347终止点 : 28°34'12.1861" N 112°20'10.5125" E 34.7049Sta. name WGS84_X WGS84_Y WGS84_Z 起始点 : -2134765.7047 m 5185375.4279 m 3029134.3183 m终止点 : -2130477.9324 m 5185294.1191 m 3032207.9559 m Variance covariance matrix:x y zx 0.078815E 0.045023E -0.002615Ey 0.058486E 0.013736Ez 0.014111E卫星号模糊度方差模糊度方差1 -19799.1 0.0162 -15428.1 0.012617 2755.0 0.0124 2147.0 0.00977 -25923.1 0.0139 -20200.0 0.01098 -11102.1 0.0132 -8650.0 0.00989 -10360.0 0.0140 -8072.0 0.010920 -41812.2 0.0191 -32515.2 0.014932 -39352.3 0.0258 -30663.2 0.02024 -15141.0 0.0197 -11797.9 0.0153----------------------整周模糊度分解-----------------------------****** Ratio = 16.7 ******1 0.0 -1.0 -19799.0 0.016 | 0.0 0.0 -15428.0 0.01317 0.0 0.0 2755.0 0.012 | 0.0 0.0 2147.0 0.0107 0.0 0.0 -25923.0 0.014 | 0.0 0.0 -20200.0 0.0118 0.0 0.0 -11102.0 0.013 | 0.0 0.0 -8650.0 0.0109 0.0 0.0 -10360.0 0.014 | 0.0 0.0 -8072.0 0.01120 0.0 0.0 -41812.0 0.019 | 0.0 0.0 -32515.0 0.01532 0.0 0.0 -39352.0 0.026 | 0.0 0.0 -30663.0 0.0204 0.0 0.0 -15141.0 0.020 | 0.0 0.0 -11798.0 0.015双差整数解-----------------------------------------------------------------------MEASUREMENTS : 1503 REJECTED : 84 RMS : 0.0159Baseline : 4287.7498 -81.3488 3073.6185 5276.2246Sta. name WGS84_Lat. WGS84_Lon. WGS84_Alt.起始点 : 28°32'18.0033" N 112°22'35.2593" E 64.1347终止点 : 28°34'12.1860" N 112°20'10.5138" E 34.6708Sta. name WGS84_X WGS84_Y WGS84_Z 起始点 : -2134765.7047 m 5185375.4279 m 3029134.3183 m终止点 : -2130477.9550 m 5185294.0790 m 3032207.9368 m Variance covariance matrix:x y zx 0.003116E -0.001993E -0.000641Ey 0.004804E 0.001237Ez 0.001790E------基线处理详解完毕-----5.4 GPS2→GPS3固定站未知站------------------------------------------------------------------------ 站名: GPS2 GPS3 WGS84 天线高: 1.725 m 1.540 m WGS84 纬度: 28:32:55.74308N 28:34:10.09600N WGS84 经度: 112:22:38.18864E 112:20:51.06211E WGS84 高程: 56.352 m 52.760 m观测数据类型:L1 & L2开始时间:2013年09月13日 04:24:15结束时间:2013年09月13日 06:30:15历元间隔:77795904 秒历元数 127卫星号 1 32 17 7 8 9 28 20 4开始 0 0 0 0 0 0 0 33 56结束 54 65 126 52 105 96 126 126 126基准卫星:28三差解----------------------------------------------------------------------- MEASUREMENTS : 1224 REJECTED : 86 RMS : 0.0693Baseline : 3107.4632 106.1853 2012.8647 3703.9475Sta. name WGS84_Lat. WGS84_Lon. WGS84_Alt.起始点 : 28°32'55.7431" N 112°22'38.1886" E 56.3523终止点 : 28°34'10.0030" N 112°20'50.9757" E 66.4633Sta. name WGS84_X WGS84_Y WGS84_Z 起始点 : -2134625.3860 m 5184825.4198 m 3030151.2526 m终止点 : -2131517.9228 m 5184931.6051 m 3032164.1174 m Variance covariance matrix:x y zx 0.124208E -0.110991E 0.063743Ey 0.162324E -0.116360Ez 0.427795E------------------------- 修复周跳----------------------------- 双差浮点解----------------------------------------------------------------------- MEASUREMENTS : 654 REJECTED : 4 RMS : 0.0120Baseline : 3109.7869 95.0344 2008.4048 3703.1737Sta. name WGS84_Lat. WGS84_Lon. WGS84_Alt.起始点 : 28°32'55.7431" N 112°22'38.1886" E 56.3523终止点 : 28°34'10.0497" N 112°20'51.0526" E 54.4969Sta. name WGS84_X WGS84_Y WGS84_Z 起始点 : -2134625.3860 m 5184825.4198 m 3030151.2526 m终止点 : -2131515.5991 m 5184920.4543 m 3032159.6574 m Variance covariance matrix:x y zx 0.258329E -0.106501E -0.082109Ey 0.744549E 0.327180Ez 0.163084E卫星号模糊度方差模糊度方差32 -2260261.9 0.0536 -3596104.9 0.041717 3011.0 0.0209 2346.0 0.016320 2903276.0 0.0296 2270512.1 0.02304 2922198.0 0.0301 2285214.0 0.023432 -2260281.9 0.0465 -3596104.9 0.0363----------------------整周模糊度分解-----------------------------****** Ratio = 13.4 ******32 0.0 1.0 -2260262.0 0.054 | 0.0 0.0 -3596105.0 0.04217 0.0 0.0 3011.0 0.021 | 0.0 0.0 2346.0 0.01620 0.0 0.0 2903276.0 0.030 | 0.0 0.0 2270512.0 0.0234 0.0 0.0 2922198.0 0.030 | 0.0 0.0 2285214.0 0.02332 0.0 0.0 -2260282.0 0.047 | 0.0 0.0 -3596105.0 0.036双差整数解-----------------------------------------------------------------------MEASUREMENTS : 654 REJECTED : 4 RMS : 0.0130Baseline : 3109.7902 95.0503 2008.4124 3703.1811Sta. name WGS84_Lat. WGS84_Lon. WGS84_Alt.起始点 : 28°32'55.7431" N 112°22'38.1886" E 56.3523终止点 : 28°34'10.0498" N 112°20'51.0523" E 54.5123Sta. name WGS84_X WGS84_Y WGS84_Z起始点 : -2134625.3860 m 5184825.4198 m 3030151.2526 m终止点 : -2131515.5958 m 5184920.4702 m 3032159.6650 m Variance covariance matrix:x y zx 0.004772E -0.004500E -0.001051Ey 0.016763E 0.000114Ez 0.006924E------基线处理详解完毕-----5.5 GPS2→GPS4固定站未知站------------------------------------------------------------------------ 站名: GPS2 GPS4 WGS84 天线高: 1.725 m 1.727 m WGS84 纬度: 28:32:55.74308N 28:34:12.18558N WGS84 经度: 112:22:38.18864E 112:20:10.52650E WGS84 高程: 56.352 m 37.092 m观测数据类型:L1 & L2开始时间:2013年09月13日 04:24:15结束时间:2013年09月13日 06:30:15历元间隔:77795904 秒历元数 127卫星号 1 32 17 7 8 9 11 28 20 4开始 0 0 0 0 0 0 0 0 6 55结束 115 113 126 52 105 96 65 126 126 126基准卫星:28三差解----------------------------------------------------------------------- MEASUREMENTS : 1670 REJECTED : 54 RMS : 0.0287Baseline : 4148.2094 475.9462 2058.2775 4655.1770Sta. name WGS84_Lat. WGS84_Lon. WGS84_Alt.起始点 : 28°32'55.7431" N 112°22'38.1886" E 56.3523终止点 : 28°34'12.1314" N 112°20'10.3854" E 41.0924Sta. name WGS84_X WGS84_Y WGS84_Z 起始点 : -2134625.3860 m 5184825.4198 m 3030151.2526 m终止点 : -2130477.1766 m 5185301.3660 m 3032209.5301 m Variance covariance matrix:x y zx 0.161662E -0.159688E 0.099316Ey 0.258509E -0.154935Ez 0.479650E------------------------- 修复周跳----------------------------- 双差浮点解----------------------------------------------------------------------- MEASUREMENTS : 1663 REJECTED : 44 RMS : 0.0150Baseline : 4146.7018 470.4929 2056.5025 4652.4942Sta. name WGS84_Lat. WGS84_Lon. WGS84_Alt.起始点 : 28°32'55.7431" N 112°22'38.1886" E 56.3523终止点 : 28°34'12.1502" N 112°20'10.5130" E 36.3169Sta. name WGS84_X WGS84_Y WGS84_Z 起始点 : -2134625.3860 m 5184825.4198 m 3030151.2526 m终止点 : -2130478.6842 m 5185295.9128 m 3032207.7551 m Variance covariance matrix:x y zx 0.076806E 0.045444E -0.001605Ey 0.052375E 0.010847Ez 0.012530E卫星号模糊度方差模糊度方差1 -17360.1 0.0172 -13528.1 0.013432 -2267482.2 0.0274 -3601732.1 0.021317 6090.0 0.0132 4745.0 0.01037 -18084.1 0.0163 -14092.1 0.01278 -6421.0 0.0134 -5004.0 0.01049 -5290.0 0.0149 -4123.0 0.011711 -17482.1 0.0237 -13623.1 0.018520 -34289.2 0.0203 -26716.1 0.01584 -6812.1 0.0213 -5251.0 0.0166----------------------整周模糊度分解-----------------------------****** Ratio = 16.7 ******1 0.0 1.0 -17360.0 0.017 | 0.0 0.0 -13528.0 0.01332 0.0 0.0 -2267482.0 0.027 | 0.0 0.0 -3601732.0 0.02117 0.0 0.0 6090.0 0.013 | 0.0 0.0 4745.0 0.0107 0.0 0.0 -18084.0 0.016 | 0.0 0.0 -14092.0 0.0138 0.0 0.0 -6421.0 0.013 | 0.0 0.0 -5004.0 0.0109 0.0 0.0 -5290.0 0.015 | 0.0 0.0 -4123.0 0.01211 0.0 0.0 -17482.0 0.024 | 0.0 0.0 -13623.0 0.01820 0.0 0.0 -34289.0 0.020 | 0.0 0.0 -26716.0 0.0164 0.0 0.0 -6812.0 0.021 | 0.0 0.0 -5251.0 0.017双差整数解-----------------------------------------------------------------------MEASUREMENTS : 1660 REJECTED : 47 RMS : 0.0160Baseline : 4146.6935 470.4646 2056.4848 4652.4761Sta. name WGS84_Lat. WGS84_Lon. WGS84_Alt.起始点 : 28°32'55.7431" N 112°22'38.1886" E 56.3523终止点 : 28°34'12.1501" N 112°20'10.5137" E 36.2882Sta. name WGS84_X WGS84_Y WGS84_Z 起始点 : -2134625.3860 m 5184825.4198 m 3030151.2526 m终止点 : -2130478.6925 m 5185295.8845 m 3032207.7374 m Variance covariance matrix:x y zx 0.002954E -0.001926E -0.000533Ey 0.004164E 0.000993Ez 0.001682E------基线处理详解完毕-----5.7 GPS3→GPS4固定站未知站------------------------------------------------------------------------ 站名: GPS3 GPS4 WGS84 天线高: 1.540 m 1.727 m WGS84 纬度: 28:34:10.09600N 28:34:12.18558N WGS84 经度: 112:20:51.06211E 112:20:10.52650E WGS84 高程: 52.760 m 37.092 m观测数据类型:L1 & L2开始时间:2013年09月13日 04:22:45结束时间:2013年09月13日 06:29:45历元间隔:77795904 秒历元数 128卫星号 1 17 32 7 8 9 11 28 20 4开始 0 0 0 0 0 0 0 0 35 58结束 56 127 67 53 106 97 8 127 127 127基准卫星:28三差解----------------------------------------------------------------------- MEASUREMENTS : 1239 REJECTED : 95 RMS : 0.0401Baseline : 1042.1880 372.5593 45.4348 1107.7096Sta. name WGS84_Lat. WGS84_Lon. WGS84_Alt.起始点 : 28°34'10.0960" N 112°20'51.0621" E 52.7601终止点 : 28°34'12.1933" N 112°20'10.3835" E 29.1915Sta. name WGS84_X WGS84_Y WGS84_Z 起始点 : -2131514.9990 m 5184918.3155 m 3032160.0776 m终止点 : -2130472.8110 m 5185290.8748 m 3032205.5124 m Variance covariance matrix:x y zx 0.128255E -0.113583E 0.066431Ey 0.163991E -0.118001Ez 0.431799E------------------------- 修复周跳----------------------------- 双差浮点解----------------------------------------------------------------------- MEASUREMENTS : 701 REJECTED : 5 RMS : 0.0084Baseline : 1036.9211 375.4374 48.0778 1103.8433Sta. name WGS84_Lat. WGS84_Lon. WGS84_Alt.起始点 : 28°34'10.0960" N 112°20'51.0621" E 52.7601终止点 : 28°34'12.1962" N 112°20'10.5225" E 34.5514Sta. name WGS84_X WGS84_Y WGS84_Z 起始点 : -2131514.9990 m 5184918.3155 m 3032160.0776 m终止点 : -2130478.0780 m 5185293.7528 m 3032208.1554 m Variance covariance matrix:x y zx 0.195377E -0.055838E -0.057972Ey 0.606968E 0.262139Ez 0.132214E卫星号模糊度方差模糊度方差17 3053.0 0.0126 2379.0 0.009832 -7265.1 0.0301 -5661.2 0.023520 -2936560.1 0.0192 -2296446.1 0.01504 -2928848.0 0.0186 -2290440.0 0.0145----------------------整周模糊度分解-----------------------------****** Ratio = 28.4 ******17 0.0 0.0 3053.0 0.013 | 0.0 0.0 2379.0 0.01032 0.0 1.0 -7265.0 0.030 | 0.0 0.0 -5661.0 0.02320 0.0 0.0 -2936560.0 0.019 | 0.0 0.0 -2296446.0 0.0154 0.0 0.0 -2928848.0 0.019 | 0.0 0.0 -2290440.0 0.014双差整数解-----------------------------------------------------------------------MEASUREMENTS : 706 REJECTED : 0 RMS : 0.0111Baseline : 1036.9079 375.4047 48.0676 1103.8193Sta. name WGS84_Lat. WGS84_Lon. WGS84_Alt.起始点 : 28°34'10.0960" N 112°20'51.0621" E 52.7601终止点 : 28°34'12.1963" N 112°20'10.5235" E 34.5243Sta. name WGS84_X WGS84_Y WGS84_Z起始点 : -2131514.9990 m 5184918.3155 m 3032160.0776 m终止点 : -2130478.0911 m 5185293.7201 m 3032208.1452 mVariance covariance matrix:x y zx 0.004528E -0.004650E -0.001030E y 0.016136E -0.000203E z 0.005791E ------基线处理详解完毕-----第六章重复基线第七章同步环第八章异步环第九章基线总结9.1 相对误差最大值9.2 绝对误差最大值第十章WGS-84三维无约束平差10.1 平差参数参考因子:1.00χ平方检验(α=95%):通过自由度:910.2 平差基线边10.3 T 检验列表10.4 自由网平差坐标第十一章WGS-84三维约束平差11.1 平差参数网的参考因子: 1.001911.2 平差基线边10.3 三维约束平差坐标第十二章二维平差12.1 平差参数迭代次数:2网的参考因子: 1.0019x向平移: 1016.8755米y向平移: -195733.1357米比例: 0.0000ppm 旋转: 0.0000秒12.2 平面距离平差值12.3 平面坐标12.4 最弱点平面中误差第十三章高程拟合13.1 平差参数迭代次数:1网的参考因子: 0.0000参考点:GPS2H = H0 + AA = -26.352313.2 拟合坐标第十四章平差总结14.1 平面距离平差值14.2 最终坐标平差值14.3 最弱点平面中误差14.4 三维约束平差坐标。
GPS网平差精度分析内部精度分析主要是对GPS观测数据的分析,包括定位精度、相对位置精度和高程精度。
定位精度用来评估测量站点坐标的准确程度,相对位置精度用来评估不同测量站点之间的相对位置误差,高程精度用来评估高程数据的准确程度。
通过分析这些指标,我们可以判断GPS观测数据的质量和精度。
外部精度分析是对网平差结果的评估,主要是通过对已知控制点的比较,来确定实际网平差结果的准确性。
可以使用误差椭圆或不确定度椭圆来表示控制点的精度范围,并与网平差结果进行比较。
如果控制点的精度范围与网平差结果的误差范围相符,说明网平差结果具有较好的精度。
在进行GPS网平差精度分析时,需要考虑的因素有很多。
首先是测量误差的影响,包括GPS接收机的误差、大气影响的误差、信号传输的误差等。
其次是数据处理的误差,如相位观测数据的模糊度解算误差、数据处理软件的误差等。
此外,还需要考虑卫星的几何分布、基线长度、观测时间等因素对网平差精度的影响。
为了提高GPS网平差的精度,我们可以采取一些措施。
首先是提高测量设备的精度,包括使用高精度的GPS接收机、增加参考站数目、使用更高精度的天线等。
其次是提高数据处理的精度,包括使用更好的数据处理软件、加强数据质量控制等。
此外,还可以增加控制点的数目和分布密度,以增加外部精度分析的可靠性。
综上所述,GPS网平差精度分析是对GPS观测数据进行评估的过程,主要包括内部精度分析和外部精度分析。
通过对GPS观测数据和网平差结果进行精度分析,可以评估GPS测量结果的可靠性,并找出提高精度的方法。
为了提高GPS网平差的精度,需要考虑各种误差和影响因素,并采取相应的措施进行改进。
工程测量GPS网平差方法总结摘要:本文针对工程测量平面控制网要求相对精度高的特点,找出gps网平差需解决的关键问题,给出解决问题的几种具体方法,并对各方法使用条件和精度进行了对比分析,对实际作业有一定的指导意义。
关键词:工程测量gps网平差独立坐标系1引言gps技术具有自动化程度高、作业速度快、定位精度高、不受天气条件限制和经济效益高等优势,在航空、航天、军事、交通、运输、水利、资源勘探、通信、气象等几乎所有的领域中都广泛应用,在测绘领域更是迅速普及,测量模式从传统的静态差分相对定位到实时动态测量(rtk)技术,从临时基站rtk到网络rtk(cors), 其技术不断发展,日新月异,但gps技术最典型的用途还是应用静态差分相对定位建立各种精度的控制网。
工程测量对控制网的精度要求有其特殊性,一般对相对精度要求要高于绝对精度,鉴于此,在进行工程测量gps网平差时就要考虑其自身的特点,尽量提高控制网的相对精度。
本文将从实践的角度对工程测量gps网平差的具体方法进行总结。
2工程测量gps网平差需解决的问题及应对措施2.1工程测量gps网平差需解决的问题gps网平差,其实质就是在wgs-84坐标系下对基线向量解算和无约束平差后转换为国家或地方坐标系成果,通常采用固定至少2个已知点数据,强制约束到国家或地方坐标系。
因控制点成果的用途不同,对其精度要求不同,采用的平差方法也不同,在工程测量中,gps网等级分为二、三和四等及一、二级,相对精度要求在1/10000至1/120000之间,特殊工程控制网要求甚至更高。
因国家大地控制网是依高斯投影方法按6°带或3°带进行分带和计算,并把观测成果归算到参考椭球面上,这样做,便于成果的统一、使用和互算。
但倘若直接作为工程测量gps网的固定点进行平差,就有可能产生以下问题:(1)因早期国家控制点精度不高造成内符合精度高的gps网精度的降低;(2)当测区远离中央子午线时,因高斯投影变形大,致使控制网点坐标反算边长与实测边长存在误差,影响施工放样;(3)当测区海拔高时,由于实地边长归算到参考椭球面上的长度变形大,也会产生第2条的问题;(4)不满足某些特殊需要,如桥梁控制网采用桥轴线坐标系更加方便、实用。
2.2应对措施为了解决以上问题,依照有关规范或课本,一般采取以下方法:(1)建立抵偿投影面的3°带高斯正形投影平面直角坐标系,通过选择合适的高程参考面抵消分带投影变形;建立任意带高斯正形投影平面直角坐标系,通过改变中央子午线抵消投影变形的影响;(3)建立具有高程抵偿面的任意带高斯正形投影平面直角坐标系,通过既改变高程参考面又改变中央子午线的方法,共同抵偿投影变形的影响;(4)假定平面直角坐标系,以满足特殊要求。
在实际作业中,为提高控制网精度,通常不直接在国家坐标系中建立控制网,而是采用独立坐标系,同时,为了和国家点保持联系,通常采用挂靠的方法,即:选取两个控制点,以其中一个控制点为起算点,以两个控制点坐标反算方位角为起算方位角,以与实地相一致的边长为起算边长,以此计算另一控制点的新坐标,作为起算数据进行gps网平差。
具体步骤是:(1)确定所建立坐标系的中央子午线:一般取测区附近的国家3°分带标准的中央子午线。
(2)确定起算点:根据测区已知点分布情况,选取两个控制点,选取原则是:最好两个点分布于测区两端,当控制点坐标非此带坐标时,先进行换带计算。
将其中一点作为起算点。
(3)确定起算方位角:将上述两个控制点通过坐标反算其方位角作为起算方位角。
(4)确定起算边长:在没有粗差的情况下,gps网的内符合精度很高,因此,起算边长的精度对整个控制网的相对精度起着至关重要的作用,是解决问题的关键,稍后作详细分析。
(5)控制点改化坐标计算:确定了以上要素后,根据起算点坐标、起算方位角和起算边长,即可计算出另一点的改化后坐标。
(6) gps网平差:将两个点坐标同时固定,进行gps网平差计算,即可求得gps网各待定点坐标。
2.3起算边长的确定方法综上所述,gps网的平差精度主要取决于起算边长的精度,起算边长的确定方法不同,gps网平差精度也不同。
确定起算边长有3种方法,详述如下:(1)实测边长法:如果两个控制点互相通视,可用全站仪实测其边长作为起算边长,测边时要加入仪器加常数、乘常数改正,气象改正,倾斜改正,如果棱镜有加常数,也要进行改正。
(2)坐标反算边长归算法:将两点坐标反算边长,得到高斯平面上的边长,先将其先归算到参考椭球面,再归算到测区平均高程面,作为起算边长。
实际上就是大地测量中将实测边长归算到高斯平面的逆运算,在此不作推导,只给出归算公式:d=d高·(1-hm/rm)-1·[1+ym2/(2rm2)+(δy)2/(24rm2)]-1式中d为归算后边长;d高为高斯面上边长,m;hm为测区平均高程,m;rm为测区平均曲率半径,m;ym为测区中心到坐标竖轴的平均距离,m。
(3)基线改平归算法:将两控制点经gps网无约束平差后的基线长进行改平计算并归算到测区平均高程面后作为起算边长。
改平归算公式为:d=(s2-(h2-h1)2)1/2·(1+(hm-(h2+ h1)/2)/rm)式中d为改化后边长,m;s为gps网无约束平差后基线长,m;h2、h1分别为两控制点的高程,m,当控制点无高程时,可采用无约束平差得到的大地高代替(两点高程异常差忽略不计);hm为测区平均高程,m;rm为测区平均曲率半径,m。
2.4编程实现归化坐标的计算为减轻归化计算的工作量,提高工作效率,笔者在excle中编制成美观实用的计算表格,利用vba编写了有关函数,实现了计算的自动化。
编写的函数主要有:十进制度转度分秒格式函数:function dms(a)d1 = int(a)d11 = (a - d1) * 60d2 = int(d11)d3 = (d11 - d2) * 60dms = d1 + d2 / 100 + d3 / 10000end function度分秒格式转十进制度函数:function deg(a)d1 = int(a)d11 = (a - d1) * 100d2 = int(d11) / 60d22 = (d11 - int(d11)) * 100d3 = d22 / 3600deg = d1 + d2 + d3end function坐标反算边长函数:function dis(x1, y1, x2, y2)dx = x2 - x1dy = y2 - y1dis = sqr(dx * dx + dy * dy)end function坐标反算方位角函数:function fwj(x1, y1, x2, y2)pi = 3.1415926f = atn((y2 - y1) / (x2 - x1))if x2 - x1 2 * pi then let f = f - 2 * pi fwj = dms(f * 180 / pi)end function直角坐标x计算函数:function xp(xc, dcp, acp)xp = xc + dcp * cos(deg(acp) * pi() / 180)end function直角坐标y计算函数:function yp(yc, dcp, acp)yp = yc + dcp * sin(deg(acp) * pi() / 180)end function3平差实例因方法(1)采用实测边长计算固定点坐标,平差后各点坐标反算边长与实测边长相符是不言而喻的,因此下面以实例说明方法(2)和方法(3)的具体处理过程,并对平差结果以测距边进行精度检测。
某工程三等gps网如图1所示。
该工程控制网点需要国家1954年北京坐标系1.5°分带(中央子午线为115.5°)坐标,测区平均海拔高程1190m,若直接固定已知点该带坐标平差,投影长度变形大,不能满足工程精度要求,为此,采用挂靠于1954年北京坐标系1.5°分带的独立坐标系,必须对控制点坐标改化后再进行平差。
控制网联测了两个国家控制点:1080和1083,选1080作为起算点,依照上述方法(2)和方法(3)分别对1083进行归算。
见表1、表2。
将改算后的控制点坐标分别作为固定数据对gps网平差,得到两套坐标成果。
4精度分析为检测控制网精度,用测距标称精度为1mm±1ppm的tc2003全站仪对互相通视的相邻点精密测量边长,经加入仪器加常数、乘常数改正,气象改正,倾斜改正等并将其化算到测区平均高程面上与方法(2)和方法(3)计算的坐标反算边长进行比较,比较结果见表3。
表3中最后一行边长较差列为边长中误差,最后一行相对精度列为平均相对精度,比较可知,两种方法均能达到三等gps网最弱边不低于1/70000的精度要求,采用方法(3)平差精度更高。
5结论采用挂靠于国家坐标系的独立坐标系进行gps网平差,既能保持与国家控制点的联系,又能保证控制网的相对精度,是一种两全其美的平差方法;采用实测边长法,要求采用能够满足控制网精度要求的全站仪进行测边,同时加入相应的改正,控制网精度取决于测边的精度;采用坐标反算边长归算法,外业不增加工作量,但需进行内业改化边长计算,控制网精度受选取的控制点精度影响,当控制点为早期国家控制点时,由于当时测量手段的落后,已知点本身精度不高,采用这种方法计算,就会将已知点的误差传递给控制网;采用基线改平归算法,不受已知点误差的影响,控制网精度取决于gps网基线精度,是三种方法中精度最高的一种,值得推广使用。
注:文章内所有公式及图表请用pdf形式查看。