2009年机械控制工程基础答案
- 格式:doc
- 大小:619.00 KB
- 文档页数:6
目录第一章自动控制系统的基本原理第一节控制系统的工作原理和基本要求第二节控制系统的基本类型第三节典型控制信号第四节控制理论的内容和方法第二章控制系统的数学模型第一节机械系统的数学模型第二节液压系统的数学模型第三节电气系统的数学模型第四节线性控制系统的卷积关系式第三章拉氏变换第一节傅氏变换第二节拉普拉斯变换第三节拉普拉斯变换的基本定理第四节拉普拉斯逆变换第四章传递函数第一节传递函数的概念与性质第二节线性控制系统的典型环节第三节系统框图及其运算第四节多变量系统的传递函数第五章时间响应分析第一节概述第二节单位脉冲输入的时间响应第三节单位阶跃输入的时间响应第四节高阶系统时间响应第六章频率响应分析第一节谐和输入系统的定态响应第二节频率特性极坐标图第三节频率特性的对数坐标图第四节由频率特性的实验曲线求系统传递函数第七章控制系统的稳定性第一节稳定性概念第二节劳斯判据第三节乃奎斯特判据第四节对数坐标图的稳定性判据第八章控制系统的偏差第一节控制系统的偏差概念第二节输入引起的定态偏差第三节输入引起的动态偏差第九章控制系统的设计和校正第一节综述第二节希望对数幅频特性曲线的绘制第三节校正方法与校正环节第四节控制系统的增益调整第五节控制系统的串联校正第六节控制系统的局部反馈校正第七节控制系统的顺馈校正第一章 自动控制系统的基本原理定义:在没有人的直接参与下,利用控制器使控制对象的某一物理量准确地按照预期的规律运行。
第一节 控制系统的工作原理和基本要求 一、 控制系统举例与结构方框图例1. 一个人工控制的恒温箱,希望的炉水温度为100C °,利用表示函数功能的方块、信号线,画出结构方块图。
图1人通过眼睛观察温度计来获得炉内实际温度,通过大脑分析、比较,利用手和锹上煤炭助燃。
煤炭给定的温度100 C手和锹眼睛实际的炉水温度比较图2例2. 图示为液面高度控制系统原理图。
试画出控制系统方块图 和相应的人工操纵的液面控制系统方块图。

机械工程控制基础目录第一章自动控制系统的基本原理第一节控制系统的工作原理和基本要求第二节控制系统的基本类型第三节典型控制信号第四节控制理论的内容和方法第二章控制系统的数学模型第一节机械系统的数学模型第二节液压系统的数学模型第三节电气系统的数学模型第四节线性控制系统的卷积关系式第三章拉氏变换第一节傅氏变换第二节拉普拉斯变换第三节拉普拉斯变换的基本定理第四节拉普拉斯逆变换第四章传递函数第一节传递函数的概念与性质第二节线性控制系统的典型环节第三节系统框图及其运算第四节多变量系统的传递函数第五章时间响应分析第一节概述第二节单位脉冲输入的时间响应第三节单位阶跃输入的时间响应第四节高阶系统时间响应第六章频率响应分析第一节谐和输入系统的定态响应第二节频率特性极坐标图第三节频率特性的对数坐标图第四节由频率特性的实验曲线求系统传递函数第七章控制系统的稳定性第一节稳定性概念第二节劳斯判据第三节乃奎斯特判据第四节对数坐标图的稳定性判据第八章控制系统的偏差第一节控制系统的偏差概念第二节输入引起的定态偏差第三节输入引起的动态偏差第九章控制系统的设计和校正第一节综述第二节希望对数幅频特性曲线的绘制第三节校正方法与校正环节第四节控制系统的增益调整第五节控制系统的串联校正第六节控制系统的局部反馈校正第七节控制系统的顺馈校正第一章自动控制系统的基本原理定义:在没有人的直接参与下,利用控制器使控制对象的某一物理量准确地按照预期的规律运行。
第一节控制系统的工作原理和基本要求一、控制系统举例与结构方框图例1.一个人工控制的恒温箱,希望的炉水温度为100C°,利用表示函数功能的方块、信号线,画出结构方块图。
图1人通过眼睛观察温度计来获得炉内实际温度,通过大脑分析、比较,利用手和锹上煤炭助燃。
煤炭给定的温度100 C手和锹眼睛实际的炉水温度比较图2例2.图示为液面高度控制系统原理图。
试画出控制系统方块图和相应的人工操纵的液面控制系统方块图。

机械控制工程基础课后答案董玉红徐莉萍主编精编W O R D版IBM system office room 【A0816H-A0912AAAHH-GX8Q8-GNTHHJ8】机械控制工程课后答案1-1机械工程控制论的研究对象与任务是什么?解机械工程控制论实质上是研究机械一r_程技术中广义系统的动力学问题。
具体地讲,机械工程控制论是研究机械工程广义系统在一定的外界条件作用下,从系统的一定初始条件出发,所经历的由内部的固有特性所决定的整个动态历程;研究这一系统及其输入、输出二者之间的动态关系。
机械工程控制论的任务可以分为以下五个方面:(1)当已知系统和输人时,求出系统的输出(响应),即系统分析。
(2)当已知系统和系统的理想输出,设计输入,即最优控制。
(3)当已知输入和理想输出,设计系统,即最优设计。
(4)当系统的输人和输出己知,求系统的结构与参数,即系统辨识。
(5)输出已知,确定系统,以识别输入或输入中的有关信息,即滤波与预测。
1.2 什么是反馈什么是外反馈和内反馈所谓反馈是指将系统的输出全部或部分地返送回系统的输入端,并与输人信号共同作用于系统的过程,称为反馈或信息反馈。
所谓外反馈是指人们利用反馈控制原理在机械系统或过程中加上一个人为的反馈,构成一个自动控制系统。
所谓内反馈是指许多机械系统或过程中存在的相互藕合作用,形成非人为的“内在”反馈,从而构成一个闭环系统。
1.3 反馈控制的概念是什么为什么要进行反馈控制所谓反馈控制就是利用反馈信号对系统进行控制。
在实际中,控制系统可能会受到各种无法预计的干扰。
为了提高控制系统的精度,增强系统抗干扰能力,人们必须利用反馈原理对系统进行控制,以实现控制系统的任务。
1.4闭环控制系统的基本工作原理是什么?闭环控制系统的基本工作原理如下:(1)检测被控制量或输出量的实际值;(2)将实际值与给定值进行比较得出偏差值;(3)用偏差值产生控制调节作用去消除偏差。
这种基于反馈原理,通过检测偏差再纠正偏差的系统称为闭环控制系统。

目录第一章自动控制系统的基本原理第一节控制系统的工作原理和基本要求第二节控制系统的基本类型第三节典型控制信号第四节控制理论的内容和方法第二章控制系统的数学模型第一节机械系统的数学模型第二节液压系统的数学模型第三节电气系统的数学模型第四节线性控制系统的卷积关系式第三章拉氏变换第一节傅氏变换第二节拉普拉斯变换第三节拉普拉斯变换的基本定理第四节拉普拉斯逆变换第四章传递函数第一节传递函数的概念与性质第二节线性控制系统的典型环节第三节系统框图及其运算第四节多变量系统的传递函数第五章时间响应分析第一节概述第二节单位脉冲输入的时间响应第三节单位阶跃输入的时间响应第四节高阶系统时间响应第六章频率响应分析第一节谐和输入系统的定态响应第二节频率特性极坐标图第三节频率特性的对数坐标图第四节由频率特性的实验曲线求系统传递函数第七章控制系统的稳定性第一节稳定性概念第二节劳斯判据第三节乃奎斯特判据第四节对数坐标图的稳定性判据第八章控制系统的偏差第一节控制系统的偏差概念第二节输入引起的定态偏差第三节输入引起的动态偏差第九章控制系统的设计和校正第一节综述第二节希望对数幅频特性曲线的绘制第三节校正方法与校正环节第四节控制系统的增益调整第五节控制系统的串联校正第六节控制系统的局部反馈校正第七节控制系统的顺馈校正第一章自动控制系统的基本原理定义:在没有人的直接参与下,利用控制器使控制对象的某一物理量准确地按照预期的规律运行。
第一节控制系统的工作原理和基本要求一、控制系统举例与结构方框图例1.一个人工控制的恒温箱,希望的炉水温度为100C°,利用表示函数功能的方块、信号线,画出结构方块图。
图1人通过眼睛观察温度计来获得炉内实际温度,通过大脑分析、比较,利用手和锹上煤炭助燃。
煤炭给定的温度100 C手和锹眼睛比较图2例2. 图示为液面高度控制系统原理图。
试画出控制系统方块图 和相应的人工操纵的液面控制系统方块图。
解:浮子作为液面高度的反馈物,自动控制器通过比较实际的液面高度与希望的液面高度,调解气动阀门的开合度,对误差进行修正, 可保持液面高度稳定。

《机械控制工程基础》习题及解答目录第1章绪论第2章控制系统的数学模型第3章控制系统的时域分析第4章控制系统的频域分析第5章控制系统的性能分析第6章控制系统的综合校正第7章模拟考试题型及分值分布第1章绪论一、选择填空题1.开环控制系统在其控制器和被控对象间只有(正向作用).P2A。
反馈作用 B.前馈作用 C.正向作用D。
反向作用2.闭环控制系统的主反馈取自(被控对象输出端)。
P3A.给定输入端B。
干扰输入端 C.控制器输出端 D.系统输出端3。
闭环系统在其控制器和被控对象之间有(反向作用)。
P3A。
反馈作用B。
前馈作用C。
正向作用 D.反向作用A.输入量B.输出量C。
反馈量 D.干扰量4.自动控制系统的控制调节过程是以偏差消除(偏差的过程)。
P2—3A.偏差的过程B。
输入量的过程C。
干扰量的过程D。
稳态量的过程5.一般情况下开环控制系统是(稳定系统)。
P2A.不稳定系统B。
稳定系统 C.时域系统D。
频域系统6。
闭环控制系统除具有开环控制系统所有的环节外,还必须有(B)。
p5A。
给定环节B。
比较环节 C.放大环节 D.执行环节7.闭环控制系统必须通过(C)。
p3A.输入量前馈参与控制B.干扰量前馈参与控制C。
输出量反馈到输入端参与控制D。
输出量局部反馈参与控制8。
随动系统要求系统的输出信号能跟随(C的变化).P6A.反馈信号B。
干扰信号C。
输入信号 D.模拟信号9.若反馈信号与原系统输入信号的方向相反则为(负反馈)。
P3A。
局部反馈B。
主反馈C。
正反馈 D.负反馈10.输出量对系统的控制作用没有影响的控制系统是(开环控制系统)。
P2A。
开环控制系统 B.闭环控制系统C。
反馈控制系统 D.非线性控制系统11.自动控制系统的反馈环节中一般具有(B )。
p5A。
.给定元件 B.检测元件C.放大元件D.执行元件12. 控制系统的稳态误差反映了系统的〔 B 〕p8A. 快速性B。
准确性 C. 稳定性D。
动态性13.输出量对系统的控制作用有直接影响的系统是(B )p3A。
机械控制工程基础课后答案(廉自生)(同名43)(总34页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--2-1什么是线性系统其最重要特性是什么答:如果系统的数学模型是线性的,这种系统就叫做线性系统。
线性系统最重要的特性,是适用于叠加原理。
叠加原理说明,两个不同的作用函数(输入),同时作用于系统所产生的响应(输出),等于两个作用函数单独作用的响应之和因此,线性系统对几个输入量同时作用而产生的响应,可以一个一个地处理,然后对它们的响应结果进行叠加。
2-2 分别求出图(题2-2)所示各系统的微分方程。
)()(t f t y km(a ))(t y )(t f 21k k m(b )c c 12m x x i o(c )1k 2k oix x c(d )ioc(e )解:)(a )()()(t f t ky t y m =+ )(b )()()()(21t f t y k k t y m =++⋅⋅⋅⋅+=-02010))((x c x m c x xc i 212110)()()()(K K s K K c csK s X s X d i ++= 02010)())((x K c x xK x x e i i =-+-⋅⋅2-3 求图(题2-3)所示的传递函数,并写出两系统的无阻尼固有频率nω及阻尼比ξ的表达式。
x ix ockm(a )Cu u oiLR(b )解:图)(a 有:mk s m c s m k s G ++=2)( m kn =ω mk C 2=ξ图)(b 有:⎪⎪⎩⎪⎪⎨⎧=++=⎰⎰idt C V idt C R L V i i i 110∴ LCs L R s LC s G 11)(2++=LC n 1=ω L C R 2=ξ 2-4 求图(题2-4)所示机械系统的传递函数。
图中M 为输入转矩,m C 为圆周阻尼,J 为转动惯量。
(应注意消去θθ ,及θ) x题2-4解:由已知可知输入量M 与输出量θ之间的关系为:M k C J m =++θθθ经拉氏变换后为:)()()(2s M k s s C s Js m =++θθθ∴ 222222/11)()()(nn n m m s Jk s J C s J k s C Js s M s s G ωξωωθ++=++=++==其中,J kn =ω JkC m 2=ξ2-5 已知滑阀节流口流量方程式为)/2(v ρωp x c Q =,式中,Q 为通过节流阀流口的流量;p 为节流阀流口的前后油压差;v x 为节流阀的位移量;c 为流量系数;ω为节流口面积梯度;ρ为油密度。
1.7习题与解答1-1工程控制论的研究对象和任务是什么?解: 工程控制理论实质上是研究工程技术中广义系统的动力学问题。
具体地说,研究的是工程技术中的广义系统在一定的外界条件(即输入或激励,包括外加控制与外加干扰)作用下,从系统一定的初始状态出发,所经历的有其内部的固有特性(即系统的结构与参数所决定的特性)所决定的整个动态历程:同时研究这一系统、输入和输出三者之间的动态关系。
工程控制理论的研究内容就系统、输入、输出三者之间的动态关系而言,工程控制论的研究内容大致可以归纳为如下五个方面:(1)当系统已定、输入已知时,求系统的输出,并且通过输出研究系统本身有关的问题,即系统分析问题。
(2)当系统已定时,求系统的输入,并且所确定的输入应使输出尽可能符合给定的最佳要求,即最优控制问题;(3)当输入已知时,确定系统,并且所确定的系统应使输出尽可能符合给定的最佳要求,即最优设计问题;(4)当输出已知时,系统已定时,识别输入或输入中的有关信息,即滤波与预测问题;(5)当输入与输出均已知时,求系统的结构和参数,以建立系统的数学模型,即系统识别或者系统辨识问题。
1-2组成典型控制系统的主要环节有那些?它们各起到什么作用?典型反馈控制系统的基本组成:给定环节、测量环节、比较环节、放大运算环节、执行环节,组成了这一控制系统的控制部分,目的是对被控制对象实现控制。
给定环节:作用是给出输入信号的环节,用于确定被控制对象的“目标值”(或成为给定值),给定环节可以用各种形式(电量、非电量、数字量、模拟量等)发出信号。
测量环节:用于测量被控量,并把被控制量转换为便于传送的另外一个物理量。
如电位计将机械转角转换为电压信号。
比较环节:输入信号和测量环节测量的被控制量的反馈量相比较,得到偏差信号,其中比较包括幅值比较、相位比较和位移比较等。
放大运算环节:对偏差信号进行必要运算,然后进行功率的放大,推动执行环节。
常用的放大类型有电流放大、液压放大等。
控制工程基础习题解答:
《控制工程基础习题解答》是2009年清华大学出版社出版的图书,作者是杜继宏,王诗宓。
内容简介:
《控制工程基础习题解答》是与《控制工程基础》配套的教材,它包含了《控制工程基础》书中全部习题的参考解答(文字解答题除外)。
对每道习题都给出了比较详细的、步骤清晰的解题过程。
对许多习题,在题解之外还附加了一项或几项说明,这些说明或者介绍多种不同的解法,或者对题目没有直接提问的相关问题进行更深入的讨论,或者给出方程在无法采用公式求解时的试探法求解过程。
这些说明可以帮助读者更好地理解题目涉及的基本概念、基本方法,也有助于启发读者对各种问题作进一步的思考和分析,同时了解试探法求解某些方程的过程。
对于频率特性图和根轨迹图的绘制,采用了两种方法,一是手工绘制简单实用的示意图,二是利用MATLAB绘制准确曲线图。
控制工程基础(第4版)习题解:
《控制工程基础(第4版)习题解》是2017年清华大学出版社出版的书籍,作者是董景新、郭美凤、陈志勇、刘云峰。
内容简介:
本书是在《控制工程基础(第3版)习题解》基础上编写而成的,主要是配合董景新、赵长德等编著的《控制工程基础(第4版)》教材(该教材被列为“十二五”普通高等教育本科国家级规划教材),与该
教材各章后的习题相对应。
该习题解对教材各章后的习题均做了较为详细的解答。
内容包括:概论、控制系统的动态数学模型、时域瞬态响应分析、控制系统的频率特性、控制系统的稳定性分析、控制系统的误差分析和计算、控制系统的综合与校正、根轨迹法、控制系统的非线性问题、计算机控制系统。
该书可供机械类、仪器类及其他非控制专业的师生参考,还可供相关科研和工程技术人员自学参考。
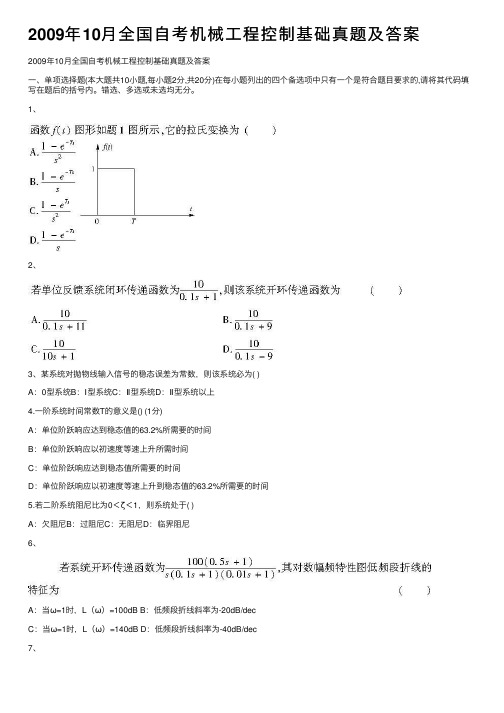
2009年10⽉全国⾃考机械⼯程控制基础真题及答案2009年10⽉全国⾃考机械⼯程控制基础真题及答案⼀、单项选择题(本⼤题共10⼩题,每⼩题2分,共20分)在每⼩题列出的四个备选项中只有⼀个是符合题⽬要求的,请将其代码填写在题后的括号内。
错选、多选或未选均⽆分。
1、2、3、某系统对抛物线输⼊信号的稳态误差为常数,则该系统必为( )A:0型系统B:Ⅰ型系统C:Ⅱ型系统D:Ⅱ型系统以上4.⼀阶系统时间常数T的意义是() (1分)A:单位阶跃响应达到稳态值的63.2%所需要的时间B:单位阶跃响应以初速度等速上升所需时间C:单位阶跃响应达到稳态值所需要的时间D:单位阶跃响应以初速度等速上升到稳态值的63.2%所需要的时间5.若⼆阶系统阻尼⽐为0<ζ<1,则系统处于( )A:⽋阻尼B:过阻尼C:⽆阻尼D:临界阻尼6、A:当ω=1时,L(ω)=100dB B:低频段折线斜率为-20dB/decC:当ω=1时,L(ω)=140dB D:低频段折线斜率为-40dB/dec7、A:90°B:53.1°C:41.8°D:56.44°8、A:(-1,0),(-2,-1)B:(-2,-1),(-∞,-3)C:(-1,0),(-3,-2)D:(-∞,-3),(-1,0)9、A:临界稳定B:不稳定C:稳定D:稳定性不能直接确定10、由伯德图估计系统传递函数的⽅法适⽤于() (2分)A:最⼩相位系统B:稳定系统C:⾮最⼩相位系统D:⼆阶以下系统⼆、简答题(本⼤题共4⼩题,每⼩题5分,共20分)1、传递函数的定义是什么?⼀个物理可实现的系统,其传递函数有什么特征?(5分)2、简要说明欲降低由输⼊和⼲扰信号引起的稳态误差,采取的措施有何不同?(5分)3.、控制系统开环频率特性的三个频段是如何划分的?它们各⾃反映系统哪⽅⾯的性能?(5分)4、简述劳斯稳定判据和奈奎斯特稳定判据在使⽤⽅法和功能上的区别。
目录第一章自动控制系统的基本原理第一节控制系统的工作原理和基本要求第二节控制系统的基本类型第三节典型控制信号第四节控制理论的内容和方法第二章控制系统的数学模型第一节机械系统的数学模型第二节液压系统的数学模型第三节电气系统的数学模型第四节线性控制系统的卷积关系式第三章拉氏变换第一节傅氏变换第二节拉普拉斯变换第三节拉普拉斯变换的基本定理第四节拉普拉斯逆变换第四章传递函数第一节传递函数的概念与性质第二节线性控制系统的典型环节第三节系统框图及其运算第四节多变量系统的传递函数第五章时间响应分析第一节概述第二节单位脉冲输入的时间响应第三节单位阶跃输入的时间响应第四节高阶系统时间响应第六章频率响应分析第一节谐和输入系统的定态响应第二节频率特性极坐标图第三节频率特性的对数坐标图第四节由频率特性的实验曲线求系统传递函数第七章控制系统的稳定性第一节稳定性概念第二节劳斯判据第三节乃奎斯特判据第四节对数坐标图的稳定性判据第八章控制系统的偏差第一节控制系统的偏差概念第二节输入引起的定态偏差第三节输入引起的动态偏差第九章控制系统的设计和校正第一节综述第二节希望对数幅频特性曲线的绘制第三节校正方法与校正环节第四节控制系统的增益调整第五节控制系统的串联校正第六节控制系统的局部反馈校正第七节控制系统的顺馈校正第一章自动控制系统的基本原理定义:在没有人的直接参与下,利用控制器使控制对象的某一物理量准确地按照预期的规律运行。
第一节控制系统的工作原理和基本要求一、控制系统举例与结构方框图例1.一个人工控制的恒温箱,希望的炉水温度为100C°,利用表示函数功能的方块、信号线,画出结构方块图。
图1人通过眼睛观察温度计来获得炉内实际温度,通过大脑分析、比较,利用手和锹上煤炭助燃。
比较图2例2.图示为液面高度控制系统原理图。
试画出控制系统方块图和相应的人工操纵的液面控制系统方块图。
解:浮子作为液面高度的反馈物,自动控制器通过比较实际的液面高度与希望的液面高度,调解气动阀门的开合度,对误差进行修正,可保持液面高度稳定。
河南科技大学
2009年攻读硕士学位研究生入学考试试题答案及评分标准 科目代码: 803 科目名称: 机械控制工程基础
一、单项选择题(每小题2分,共40分)
1. (D)
2. (D)
3. (D)
4. (C)
5. (D)
6. (D)
7. (B)
8. (A)
9. (A) 10.(C) 11.(C) 12.(B) 13.(C) 14.(B) 15.(B) 16.(C) 17.(C) 18.(D) 19.(C) 20.(B)
二.(10分)使用方块图变换方法求出图5所示系统的闭环传递函数()
()()
C s s R s Φ= 解:
R ((2分)
R (
(2分)
R (2分)
(2分)
+=
++121324545124134
(G G +G G G )(1+G G )
C(s) (2分)
三、(20分) 解:
1.由题意可知,实验物体m 的重力是工作台面产生位移的原因,故输入应选为实验物体m 受到的重力。
设实验物体m 受到的重力为()f t ,选实验物体m 作受力分析。
由达朗贝尔定律有:
()mx
Bx Kx f t ++= (2分)
对上式两边进行拉氏变换有
2()()()ms Bs K X s F s ++=
则系统的传递函数为
2
()1
()()X s G s F s ms Bs K
=
=++
将系统的传递函数转化为标准形式有
2222
2()11/()()2n n n X s K m
G
s k B K F s
ms Bs K K s s s s m m
ωζωω===⋅=⋅++++++ (2分)
由系统的闭环零、极点分布图可知:
5223
n n B m ωζω⎧==⎪⎪⎨
⎪==⨯⎪⎩
(2分)
已知10
Kg m =,故250N/m K =,60N s/m B =⋅。
(2分)
故系统的传递函数为2()125
()()250625
X s G s F s s s =
=⋅++
(2分)
2. 易知()101()f t t =⨯,则实验物体的运动表达式为
212510()()(
)250625X s G s F s s s s
==
⋅⋅++ (4分)
对上式进行拉式反变换有 ()mx
t ()f t
331()10[1arctan 2504
0.04[1 1.25sin(4arctan )]
34
0.040.05sin(4arctan )
3
n t
d t t x t t
e t e t ζωω---=⋅⋅+=⋅-+=-+
(6分)
四、(20分) 解:设15()0.011G s s =
+,210
()(0.11)
G s s s =+,则由系统框图得到系统的输出为
21()()[()()()]()()C s G s G s E s N s R s E s =⋅⋅+=-
整理后得系统的误差为
21212()()
()()1()()1()()
G s R s E s N s G s G s G s G s =
-++
(10分)
则系统的稳态误差为
2001212
()()
()[()]1()()1()()lim lim ss s s G s R s e sE s s N s G s G s G s G s →→==⋅-++ (2分)
由已知条件可知5()R s s =
,10()N s s
=(2分),则系统的稳态误差为 00
10
1510(0.11)
()[]
510510110.011(0.11)0.011(0.11)
022
lim lim ss s s s s e sE s s s s s s s s s s →→+==⋅⋅-⋅+⋅+⋅++++=-=- (8分) 五、(24分) 解:
1. 令0.5ζ=,
则a r c t a n
a n 36=︒。
当所有特征根位于[]s 平面上2s =-的左侧时,特征根的分布范围如图所示
(4分)
系统闭环传递函数为22
()/()()//C s K K T
s R s Ts s K
s s T K T
Φ=
==++++
可得n ωζ⎧=⎪⎨=
⎪⎩
(2分)
令0.5ζ=,得11/KT K T ≤≤
(2分)
由特征方程2
0Ts s K ++=可知系统的稳定条件为00T K >>
(2分)
特征根的实部是1/(2)T -,令1/(2)2T -<-得1
4
T <
(2分)
则在T-K 直角坐标系下相对应的K 、T 的取值范围如图所示
(2分)
2. 若希望闭环系统不出现谐振现象,则有ζ≤
(2分)
即ζ=≤1/2
K T
≥(2分)
若希望闭环系统无阻尼固有频率1(rad/s)
n
ω≥,则有
1
n
ω=≥,即K T
≥(2分)
由特征方程20
Ts s K
++=可知系统的稳定条件为00
T K
>>(2分)则在T-K直角坐标系下相对应的K、T的取值范围如图所示
(2分)
六、(20分)
1. 当1
ω=时,20lg20lg1020dB
K==,Bode如图所示
(10分)
注:缺一项标注扣1分。
2. 由Bode 图可知,剪切频率10(rad/s)c ω≈,相位裕量44γ≈︒。
(4分)
3. 由Bode 图可知,当剪切频率c ω的由小到大变化时,相位裕量γ将先由小到大变化,在
c ω时达到最大值,此后,又由大到小变化。
当K 值变化时,开环传递函数的相频特性不发生变化,而幅频特性随K 值增大上移,致使剪切频率c ω由大到小变化。
因此,当K 值由小到大变化时,相位裕量γ将先由小到大,后又由大到小变化,系统稳定性也将呈现出先由差变好,后由好变差的变化过程。
(6分)
七、(16分)
1. 由系统开环传递函数123
(1)(1)
()K T s T s G s s ++=
可知,其在[s]右半平面没有极点数,故0P =。
由其对应的Nyquist 曲线可知,当:ω-∞→∞时,Nyquist 曲线不包围[-1,j0]点,故0N =。
由系统Nyquist 稳定性判据可知0Z P N =-=,故闭环系统在[s]右半平面没有极点,由系统稳定的充要条件可知,闭环系统是稳定的。
(8分)
2. 由系统开环传递函数(1)
()(1)
K Ts G s s s +=
-可知,其在[s]右半平面有一个极点数1s =,故1P =。
由其对应的Nyquist 曲线可知,当:ω-∞→∞时,Nyquist 曲线顺时针包围[-1,j0]点一圈,故1N =-。
由系统Nyquist 稳定性判据可知1(1)2Z P N =-=--=,故闭环系统在[s]右半平面有两个极点,由系统稳定的充要条件可知,闭环系统是不稳定的。
(8分)。