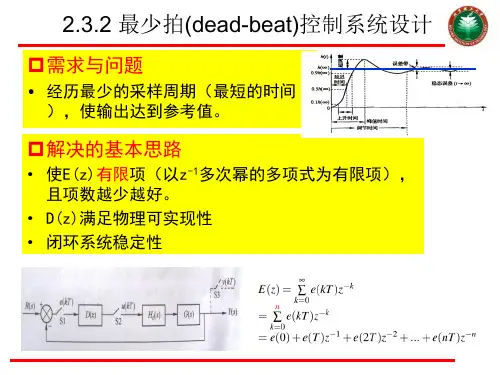
网络控制系统2章
- 格式:ppt
- 大小:1.84 MB
- 文档页数:52
第一章绪论问题解析:5.(单选题)答题: A. B. C. D. (已提交)参考答案:A问题解析:6.(单选题)答题: A. B. C. D. (已提交)参考答案:D问题解析:7.(单选题)答题: A. B. C. D. (已提交)参考答案:A问题解析:8.(单选题)答题: A. B. C. D. (已提交)10.(单选题)答题: A. B. C. D. (已提交)参考答案:C第三章自动控制系统的时域分析1.(单选题) 1.描述系统静态性能的指标有()A.延迟时间td B.调节时间ts C.最大超调量 D.稳态误差ess答题: A. B. C. D. (已提交)参考答案:D问题解析:问题解析:4.(单选题) 4.某二阶系统特征方程的根为,则其工作在()。
A 无阻尼B 欠阻尼C 临界阻尼D 过阻尼答题: A. B. C. D. (已提交)参考答案:A问题解析:5.(单选题) 5. 已知二阶系统的传递函数是,则该系统属于( )。
A.无阻尼系统B.欠阻尼系统C.临界阻尼系统D.过阻尼系统答题: A. B. C. D. (已提交)参考答案:B问题解析:6.(单选题) 6.右图各曲线对应二阶系统不同阻尼情况下单7.(单选题) 7.已知系统的开环传递函数为,则其型别为()。
A.I型B.II型C.III型D.0型答题: A. B. C. D. (已提交)参考答案:B问题解析:8.(单选题) 8、系统的开环传递函数为,该系统的开环放大系数为( )A.50 B.25 C.10 D.5答题: A. B. C. D. (已提交)参考答案:C问题解析:9.(单选题) 9、系统开环传递函数为,其位置静态误差系数为()。
A. 0B.C.10D.5答题: A. B. C. D. (已提交)参考答案:B问题解析:10.(单选题) 10.若某负反馈控制系统的开环传递函数为,则该系统的闭环特征方程为( )。
A. B.C. D.与是否为单位反馈系统有关答题: A. B. C. D. (已提交)参考答案:B11.(单选题) 11.某单位反馈系统的开环传递函数为,则该系统要保持稳定的K值范围是( )。
第二章 控制系统的数学模型习题及答案2-1 试建立下图所示各系统的微分方程。
其中电压)(t u r 和位移)(t x 为输入量;电压)(t u c 和位移)(t y 为输出量;R (电阻),C (电容),k (弹性系数),和f (阻尼系数),均为常数。
解:(a )应用复数阻抗概念可写出)()(11)(11s U s I csR cs R s U c r ++= (1) 2)()(R s Uc s I =(2) 联立式(1)、(2),可解得:CsR R R R Cs R R s U s U r c 212112)1()()(+++=微分方程为:r r c c u CR dt du u R CR R R dt du 121211+=++ (b )如图解2-1(b)所示,取A,B 两点分别进行受力分析。
对A 点有 )()(111dtdydt dx f x x k -=- (1) 对B 点有 y k dtdydt dx f 21)(=- (2) 联立式(1)、(2)可得:dtdx k k k y k k f k k dt dy2112121)(+=++ 2-2 试证明下图所示的力学系统(a)和电路系统(b)是相似系统(即有相同形式的数学模型)。
解:(a) 取A 、B 两点分别进行受力分析,如图解所示。
对A 点有)()()(1122y y f y xf y x k -=-+- (1) 对B 点有1111)(y k y yf =- (2) 对式(1)、(2)分别取拉氏变换,消去中间变量1y ,整理后得)()(s X s Y = 21212121221212212121()1()1f f f fs s k k k k f f f f f s s k k k k k +++++++21221221221211221221k k s )k f k f k f (s f f k k s )k f k f (s f f +++++++= (b) 由图可写出sC R s U c 221)(+= sC R s C R sC R s U r 111112111)(+⋅++整理得)()(s U s U r c = 1)(1)(21221122121221122121+++++++s C R C R C R s C C R R s C R C R s C C R R 比较两系统的传递函数,如果设112211221,1,,,R k R k C f C f ====则两系统的传递函数相同,所以两系统是相似的。
1.已知无源网络如题图2.1所示,其中i ()u t 为输入电压,o ()u t 为输出电压,试列写动态微分方程。
(a ) (b ) (c )题图2.1 无源网络1.(a )因为 12i i i =-,1i o u u u =-故 i o 1111o2i o 12d()d d d u u u i R R u i R u u ui C Ct t -⎧==⎪⎪⎪=⎨⎪⎪-==⎪⎩i o o i o 12d()d u u u u u CR R t--∴=- 整理得到o i 1212o 122i d d ()d d u uR R C R R u R R C R u t t++=+(b )因为i o 1121d i uu i R u R i R i i t C -⎧=⎪⎪⎨⎪=++⎪⎩⎰整理得到o i 12o 2i d d ()d d u uR R C u R C u t t++=+(c )因为i 1121o 1122o 1o 2()d d d d u u i i i i R u u i i C R t u L u u R t ⎧-=+=⎪⎪⎪⎪==⎨⎪⎪-=⎪⎪⎩得到oi 1112o 1o2()d d d d u u u u C R R t u L u u R t -⎧=+⎪⎪⎨⎪=+⎪⎩2o o oo o i 2111222d d d d d d u u u u u u L CL C R R R R t R t R t --=++ 整理得到2o o 11212o 2i 2d d ()()d d u uR LC R R C L R R u R u t t++++=2.试求题图2.2中各无源网络的传递函数。
)(a ) (b ))C(c ) (d )题图2.2 习题2的无源网络2. (a )因为111111R Z R Cs R Cs ==+ 所以o 2122i 121212()()()U s R R R Cs R G s U s Z R R R Cs R R +===+++ (b )因为11111111R Z R C s R C s ==+,22222211R C s Z R C s C s +=+= 所以o 211222i 121212112212()(1)(1)()()()1U s Z R C s R C s G s U s Z Z R R C C s R C R C R C s ++===+++++ (c )因为()()()22122221111R Ls R Ls Cs Z R Ls Cs LCs R Cs R Ls Cs++=+==++++ 所以o 122i 1111212()()()()U s Z Ls R G s U s R Z R LCs R R C L s R R +===+++++ (d )因为1212112111211()1R R C s R Z R R C s R C s R C s +=+=++,32232211R C s Z R C s C s+=+=所以2o 3121211213222i 121223131211212232()()()1()()()()1U s R R R C C s R C R C R C s Z G s U s Z Z R R R R R R C C s R C R C R C R C s +++++===++++++++ 3. 试求题图2.3中各有源网络的传递函数。
第2章连续控制系统的数学模型2.1 控制系统数学模型的概念控制理论分析、设计控制系统的第一步是建立实际系统的数学模型。
所谓数学模型就是根据系统运动过程的物理、化学等规律,所写出的描述系统运动规律、特性、输出与输入关系的数学表达式。
建立描述控制系统的数学模型,是控制理论分析与设计的基础。
一个系统,无论它是机械的、电气的、热力的、液压的、还是化工的,都可以用微分方程加以描述。
对这些微分方程求解,就可以获得系统在输入作用下的响应(即系统的输出)。
对数学模型的要求是,既要能准确地反映系统的动态本质,又便于系统的分析和计算工作。
2.1.1 数学模型的类型数学模型是对系统运动规律的定量描述,表现为各种形式的数学表达式,从而具有不同的类型。
下面介绍几种主要类型。
1. 静态模型与动态模型根据数学模型的功能不同,数学模型具有不同的类型。
描述系统静态(工作状态不变或慢变过程)特性的模型,称为静态数学模型。
静态数学模型一般是以代数方程表示的,数学表达式中的变量不依赖于时间,是输入输出之间的稳态关系。
描述系统动态或瞬态特性的模型,称为动态数学模型。
动态数学模型中的变量依赖于时间,一般是微分方程等形式。
静态数学模型可以看成是动态数学模型的特殊情况。
2. 输入输出描述模型与内部描述模型描述系统输出与输入之间关系的数学模型称为输入输出描述模型,如微分方程、传递函数、频率特性等数学模型。
而状态空间模型描述了系统内部状态和系统输入、输出之间的关系,所以称为内部描述模型。
内部描述模型不仅描述了系统输入输出之间的关系,而且描述了系统内部信息传递关系,所以比输入输出模型更深入地揭示了系统的动态特性。
3. 连续时间模型与离散时间模型根据数学模型所描述的系统中的信号是否存在离散信号,数学模型分为连续时间模型和离散时间模型,简称连续模型和离散模型。
连续数学模型有微分方程、传递函数、状态空间表达式等。
离散数学模型有差分方程、Z传递函数、离散状态空间表达式等。
第二章 控制系统的数学模型2-1 试分别列写图2-1中各无源网络的微分方程。
(a ) (b )图2-1 无源网络2-2 已知液压系统管道中,通过阀门的流量Q 满足如下流量方程P K Q =式中,K 为比例常数,P 为阀门前后的压差。
若流量Q 与压差P 在平衡点)P (00,Q 附近作微小变化,试导出线形化流程方程。
2-3 设弹簧特性由描述为:1.165.12y F =其中,F 是弹簧力,y 是变形位移。
若弹簧在变形位移0.25附近作微小变化,试推导F Δ的线性化方程。
2-4 试说明图2-2所示网络的传递函数为1211211212111112)(1)()(R R R s C R R L S C R R L s R L s U s U +++++=图2-2 无源网络2-5 求图2-3所示有源网络的传递函数。
图2-3 有源网络2-6 试证明图2-4(a)的电网络与(b)的机械系统有相同的数学模型。
图2-4 电网络与机械系统2-7 由运算放大器组成的控制系统模拟电路如图2-5所示,试求闭环传递函数 )()(s U s U r c 。
图2-5 控制系统模拟电路2-8 某位置随动系统原理方块图如图2-6所示。
已知电位器最大工作角度o 330max =θ,功率放大级放大系数为K3,要求:(1) 分别求出电位器传递系数K0、第一级和第二级放大器的比例系数K1和K2;(2) 画出系统结构图;(3) 简化结构图,求系统传递函数)(/)(0s s i θθ。
图2-6 位置随动系统原理图2-9 已知一系统由如下方程组组成,试绘制系统结构图并求闭环传递函数)()(s R s C[])()()()()()()(87111s C s G s G s G s R s G s X −−=[])()()()()(36122s X s G s X s G s X −=[])()()()()(3523s G s C s G s X s X −=)()()(34s X s G s C =2-10 已知控制系统结构图如图2-7所示。