矿井提升机plc控制系统设计-正文
- 格式:docx
- 大小:31.64 KB
- 文档页数:16
目录摘要 (III)关键词 (III)Abstract (IV)Keywords (IV)第1章绪论............................................................. - 1 -1.1国内外矿井提升机发展现状......................................... - 1 -1.1.1国内矿井提升机电气控制系统的现状........................... - 1 -1.1.2国外提升机电气控制系统的现状............................... - 2 -1.2课题研究的目的和意义............................................. - 3 -1.3本论文承担的任务................................................. - 4 -1.4小结............................................................. - 5 - 第2章矿井提升机调速控制系统分析....................................... - 6 -2.1引言............................................................. - 6 -2.2提升机工作原理及机械结构......................................... - 6 -2.3提升机调速控制方式及调速性能分析................................. - 7 -2.3.1提升机直流调速性能分析..................................... - 7 -2.3.2提升机交流调速性能分析..................................... - 8 -2.4提升机调速控制方案分析........................................... - 9 -2.4.1传统转子回路串电阻调速系统................................ - 10 -2.4.2模糊控制调速系统.......................................... - 10 -2.4.3直接转矩控制系统.......................................... - 11 -2.4.4矢量控制变频调速系统...................................... - 12 -2.5小结............................................................ - 14 - 第3章提升机调速控制系统硬件实现...................................... - 15 -3.1引言............................................................ - 15 -3.2提升机电控系统总体结构.......................................... - 15 -3.3提升机电控系统变频器选择........................................ - 17 -3.4变频控制部分设计................................................ - 17 -3.4.1变频调速主系统设计........................................ - 17 -3.4.2变频器外部电路设计........................................ - 20 -3.5 PLC控制部分设计................................................ - 24 -3.5.1基本控制功能.............................................. - 24 -3.5.2位置检测电路.............................................. - 28 -3.6硬件调速控制系统保护措施........................................ - 29 -3.6.1热继电器过载保护.......................................... - 30 -3.6.2调速控制系统抗干扰处理.................................... - 31 -3.7小结............................................................ - 33 - 第4章提升机调速控制系统软件实现...................................... - 34 -4.1引言............................................................ - 34 -4.2矿井提升机中S型速度曲线建模及实现.............................. - 34 -4.2.1速度曲线的选择及给定方法.................................. - 34 -4.2.2提升机理想S形速度曲线数学模型............................ - 35 -4.2.3理想速度曲线的实现........................................ - 39 -4.3调速控制系统软件流程............................................ - 42 -4.4小结............................................................ - 44 - 第5章全文总结........................................................ - 45 -5.1提升机电控系统主电路部分........................................ - 45 -5.2控制系统软件设计部分............................................ - 45 -5.3提升机速度控制理论分析及抗干扰保护.............................. - 46 - 参考文献............................................................... - 47 - 致谢................................................................... - 48 -基于PLC的矿井提升机变频调速系统设计摘要传矿井提升机是煤矿安全生产的关键设备之一,其作用是提升煤炭、矸石,升降人员和下放物料等,在整个煤矿生产中占有十分重要的地位。

1 引言目前,我国绝大部分矿井提升机〔超过70% 〕采用传统的交流提升机电控系统〔tkd-a为代表〕。
tkd控制系统是由继电器逻辑电路、大型空气接触器、测速发电机等组成的有触点控制系统。
经过多年的发展,tkd-a系列提升机电控系统虽然已经形成了自己的特点,然而其不足之处也显而易见,它的电气线路过于复杂化,系统中间继电器、电气接点、电气联线多,造成提升机因电气故障停车事故不断发生。
采用 plc技术的新型电控系统都已较成功的应用于矿井提升实践,并取得了较好的运行经验,克服了传统电控系统的缺陷,代表着交流矿井提升机电控技术发展的趋势。
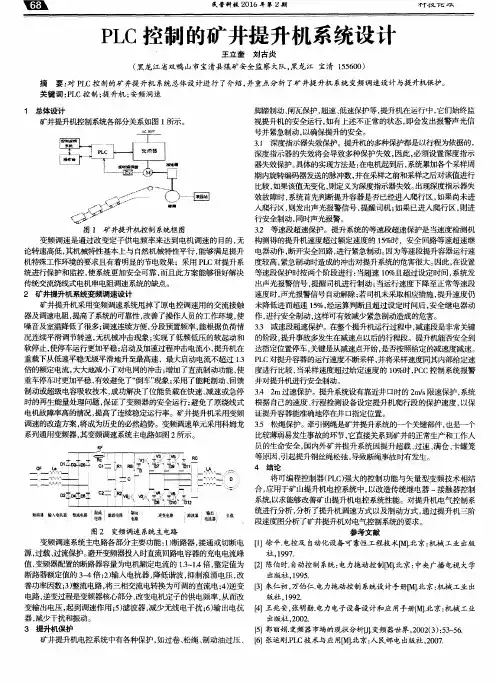
2 总体设计方案基于plc技术的矿井交流提升机电控系统控制电路组成结构如图1所示,要由以下5部分组成:高压主电路〔包括高压换向器、电动机、启动柜、动力制动电源〕、主控plc电路、提升行程检测与显示电路、提升速度检测、提升信号电路,其中高压主电路部分仍采用传统的继电器控制电路。
图1 矿井交流提升机电控系统框图工作过程:当井口或井底通过信号通信电路发出开车信号后,开车条件具备。
司机将制动手柄向前推离紧闸位置,主电动机松闸。
司机将主令控制器的操作手柄推向正向〔或反向〕极端位置,主控plc通过程序控制高压换向器首先得电,使高压信号送入主电动机定子绕组,主电动机接入全部转子电阻启动,然后依次切除8段电阻,实现自动加速,最后运行在自然机械特性上。
交流提升机运行时,旋转编码器跟随主电动机转动,输出2列a/b相脉冲,分别接到主控plc的高速计数器hsc0的a/b相脉冲输入端,由主控plc根据a/b脉冲的相位关系,自动确定hsc0的加、减计数方式。
根据hsc0的计数值,就可以计算出提升行程并显示。
同时只根据旋转编码器输出的a相脉冲,主控plc进行加计数。
根据hsc1在恒定间隔时间内的计数值,就可以计算出提升速度。
3 硬件设计3.1 提升机主回路部分设计主回路用于供应提升电动机电源,实现失压、过流保护,控制电机的转向和调节转速。
矿井提升机电控系统原理设计摘要我国矿井提升机大多是采用交流异步电机拖动,其电气控制系统采用转子串、切电阻调速,由继电器-接触器构成逻辑控制装置。
本文以安全、可靠、高效、经济为出发点,以可靠性原则为依据,对矿井交流提升机电控系统进行研究设计,由可编程控制器(PLC)代替继电器-接触器构成的逻辑控制装置。
其中简单介绍了国内外矿井提升机发展概况,提升机机械结构、工作原理,分析了其技术经济性。
对于PLC的控制原理及应用做了一般性的介绍。
详述了提升机电控系统和调速原理,如:测速部分和保护部分。
本文以TKD-NT 单绳缠绕式矿井提升机为例,提出了研究设计方案,并且在实践中成功实施。
PLC电控系统实现了对提升过程的程序控制,精度高;实现了速度、电流以及矢量的数字交换等,对提升机进行闭环调节;实现行程、速度等重要参数及提升状态的监视;实现无触点控制,寿命长,可靠性大大提高,具有良好的控制监视系统;实现了显示、记录等有关数据的全部自动化。
关键词:矿井交流提升机,PLC,调速,电控技术研究THE DESIGN OF ELECTRIC CONTROL SYSTEMBASED ON MINE ELEVATORABSTRACTIn China, mine elevator whose electric control system uses speed regulation by means of stringing and slicing the rotor resistance, and it constitutes the logic control device by the relay and contactor adopting the means of the drive of AC asynchronous motor in most cases. This paper which studies and designs the electric control system of AC mine elevator, adopting PLC which takes the place of the logic control device constituted by the relay and contactor takes the security, reliability, high efficiency, economy as a starting point, and takes the reliability principle as the basis. There into, this paper gives a brief introduction on the development of mine elevator in home and abroad, its framework and theory, while doing some economic study. Then, it introduces the theory and application of PLC simply. On the side, it goes into particulars about electric control system, for example, speed measurement and safeguard. This paper sets TKD-NT elevator for an example, proposes the research and design plan which puts in practice successfully. The electric control system based on PLC has carried out the procedure control of hoist process and high accuracy, closed-cycle control of mine elevator through speed, electric current as well as digital switching of vector and so on, the monitor of important parameters such as the distance of travel, speed, the state of hoist. In addition, the system also has carried out contact less control, long life-span, reliability greatly improved, good control supervisory system and completely automation of relevant data’s demonstration, recording and so on.KEY WORDS: AC mine elevator, PLC, speed regulation, electric controltechnology research目录前言 (1)第1章国内外矿井提升机发展概述 (2)§1.1国外矿井提升机现状 (2)§1.2我国矿井提升机电气控制系统的现状 (2)第2章提升机机械结构及工作原理 (4)§2.1机械结构 (4)§2.2工作原理 (5)第3章串电阻调速系统 (7)§3.1串电阻调速系统原理 (7)§3.2串电阻调速程序 (8)第4章提升机电控系统构成 (14)§4.1引言 (14)§4.2主回路 (15)§4.3测速回路 (16)§4.4安全回路 (16)§4.5控制回路 (18)§4.5.1 信号回路 (18)§4.5.2 电机正反转回路 (18)§4.5.3 制动回路 (19)§4.5.4 转子电阻控制回路 (19)§4.6监控系统 (20)§4.6.1 上位机 (20)§4.6.2 操作台 (21)第5章PLC 操作主控系统原理及应用 (22)§5.1PLC系统组成 (22)§5.2各单元基本特点 (22)第6章技术经济性分析 (24)结论 (26)致谢 (27)参考文献 (28)前言矿井提升机常被人们称为矿山的咽喉,是矿山最重要的关键设备,是地下矿井与外界的唯一通道,肩负着矿石、物料、人员等的重要运输责任。
摘要煤矿矿井提升机是煤矿的重要设备,随着计算机PLC和液压技术的不断进步,采用先进的控制技术和液压比例加载技术来改造传统矿山行业的传统控制系统,从而使矿井提升机的控制性、安全性、防冲击能力得到很大发的改善,其控制系统和液压比例加载系统的技术性能和可靠性能直接影响煤矿的安全生产。
本设计重点对矿井提升机液压站系统和比例溢流阀应用上进行了重点研究。
电液比例控制系统与可编程控制器PLC相结合,压力传感器将采集的信号经处理后送入PLC中对信号进行处理从而发出控制信号,控制信号经放大控制器处理后作用在比例溢流阀上,控制比例电磁铁作用,控制液压源到液压缸的流量在液压缸中产生不同的压力从而达到控制盘闸制动器的目的。
关键词:提升机,电液比例,PIDAbstractMine hoist is the important equipment in coal mine, with the development of computer PLC and hydraulic technology, the traditional control system to transform the traditional mining industry to adopt the control technology and hydraulic proportional loading technology advanced, so that the mine safety machine anti impact ability obtained the very big development improvement, its technical performance control system and hydraulic proportional loading system and reliable performance directly affects the safety in production of coal mine. This paper adopts PLC technology to control the electro-hydraulic loading system. The PLC programmable controller so that it can be compared to the traditional mine safety system greatly improve the electro-hydraulic proportional loading system, running more stable and accurate. The reconstructed system can meet the stringent requirements of the mine production, but relatively little investment, high cost performance, has a strong practical value.Keywords: hoister ,electro-hydraulic,proportional PID目录第一章绪论 (5)1.1 课题研究意义 (5)第二章电液比例控制系统与PLC概述 (9)2.1电液比例控制系统 (9)2.2 PLC的简介 (10)第三章矿井提升机制动系统及其液压站设计 (14)3.1 盘闸制动器的工作原理 (14)3.2 制动过程分析研究 (15)3.3 性能参数的确定 (19)3.4 盘式制动系统的液压站 (20)第四章基于PLC的电液比例控制系统 (24)4.1 比例控制放大器 (25)4.2比例液压系统设计 (29)4.3 基于PLC的电控系统设计 (31)4.4建模与分析 (33)第五章电气控制要求 (41)5.1 I/O地址分配 (41)5.2 S7--200程序设计梯形图 (46)参考文献 (54)致谢词 (54)附录-外文文献及翻译 (56)前言矿井提升机是矿山生产的至关重要的大型设备,对矿井的生产和安全起着非常重要的作用,有着重要的国民经济意义。
矿井提升机控制系统设计矿井提升机是矿山生产过程中的重要设备,其控制系统设计的优劣直接关系到生产安全和生产效率。
本文将介绍矿井提升机控制系统设计的相关关键技术,并探讨优化方法。
矿井提升机控制系统主要包括电气控制系统和液压控制系统。
电气控制系统主要负责运行监测和故障诊断,而液压控制系统则承担着载荷控制和速度控制等功能。
为了确保提升机的安全与稳定,控制系统需满足高精度、快速响应、可靠性高等要求。
在控制系统的设计过程中,通常采用多种控制算法,如PID控制、模糊控制、神经网络控制等。
PID控制简单易行,但对参数调整要求较高;模糊控制能够处理不确定性和非线性问题,但计算复杂度较高;神经网络控制能够自适应地处理复杂的非线性过程,但训练时间较长,且对数据要求较高。
针对不同控制算法的优缺点,我们可以采用混合控制策略,将多种控制方法结合起来,实现优势互补。
例如,可以将PID控制和模糊控制相结合,或者将模糊控制和神经网络控制相结合,以提高控制系统的性能。
在控制系统设计中,还应充分考虑实时监控和故障诊断功能。
通过在系统中加入传感器和监测模块,实现对提升机运行状态的实时监测,及时发现并处理潜在问题,以避免事故发生。
为了提高系统的可靠性,应选择高可靠性、高稳定性的硬件设备,并加强系统的抗干扰设计。
矿井提升机控制系统设计是矿山生产中的重要环节,其优劣直接关系到矿山的安全生产和生产效率。
在设计中,应充分考虑系统的实际情况和需求,选择合适的控制算法和硬件设备,并加强实时监控和故障诊断功能,以实现提升机的安全、稳定、高效运行。
同时,随着科技的不断发展,应积极引入新的技术手段,对控制系统进行持续优化和改进,以适应不断提升的生产需求。
未来的研究可以从以下几个方面展开:进一步研究矿井提升机控制系统的动态特性和鲁棒性,以提高系统的适应性和稳定性。
针对矿井提升机运行过程中的复杂环境和恶劣条件,研究更加可靠、高效的故障诊断方法。
结合人工智能和大数据技术,实现提升机控制系统的智能化和自适应化,提高生产效率。
内容摘要:矿井提升设备是矿井生产的主要设备之一,在矿井生产中占有主要的地位,是沟通井下生产与地面生产运输的纽带。
矿井提升设备是一套复杂的机械-电气机组。
所以,矿井提升设备是矿山生产中具有举足轻重作用的重大的大型设备。
本设计首先对提升机主要设备箕斗、提升钢丝绳、滚筒、天轮等进行规格的选型与设计,以及对提升机主要结构的作用进行了介绍分析。
然后计算出提升机与井筒的相对位置以便于安装。
接着对提升机常见的故障进行了分析与提出了预防措施。
最后对提升机的制动部分与控制系统进行了总体设计。
关键词:矿井提升机、箕斗、钢丝绳、井筒、PLC控制Abstract : hoisting equipment is the main mine production equipment, in mine production has principal position, Underground production is on communication with the ground production of transport links. Mine Hoist equipment is a complex mechanical-electrical unit. So, mine is mine equipment to upgrade the production plays an important role in the major large equipment.Design of the first major equipment hoist skip, rope, pulley, wheel and other specifications for the selection and design, and the hoist structure of the role of an introductory analysis. Then compute the elevator shaft and the relative position for installation. Proceeded to hoist common fault with the analysis of preventive measures. Finally, the elevator part of the brake control system with the overall design.Keywords : Mine Hoist, skip, rope, wellbore, PLC control矿井提升机控制系统设计1、绪论1.1 引言矿井提升设备是矿井生产的主要设备之一,在矿井生产中占有主要的地位,是沟通井下生产与地面生产运输的纽带。
基于PLC矿井提升机控制系统设计矿井提升机控制系统是矿井生产过程中非常重要的一环,它的设计与实现对于安全、高效的矿井生产具有重要意义。
基于PLC的控制系统设计能够更好地实现对提升机的精确控制。
本文将探讨基于PLC的矿井提升机控制系统的设计。
一、系统总体设计矿井提升机控制系统的总体设计包括硬件设计和软件设计两个方面。
硬件设计方面,需要选择适合的PLC控制器和外围设备。
PLC控制器一般采用可编程逻辑控制器,因为PLC具有稳定性好、可靠性高、可编程性强等优点。
外围设备包括传感器、执行器等,用于对矿井提升机的状态进行检测和控制。
软件设计方面,需要编写PLC程序来实现对矿井提升机的控制。
软件设计应该包括以下几个基本要素:1.输入接口:用于接收外部输入信号,如压力、温度等传感器信号。
2.输出接口:用于输出控制信号,如电机启停、行走控制等。
3.逻辑控制:实现对提升机的自动控制,包括启停、速度调节等功能。
4.保护控制:实现对提升机的各种保护功能,如超载保护、温度保护等。
5.监控功能:实现对提升机运行状态的实时监控,包括显示当前状态、报警功能等。
二、具体控制功能设计1.提升机启停控制:根据生产需要,通过PLC程序控制提升机的启停。
2.提升机速度控制:通过调节电机频率,实现提升机运行速度的调节。
3.提升机方向控制:通过控制电机正反转,实现提升机的正向运行和反向运行。
4.紧急停止控制:提供紧急停止按钮,一旦发生紧急情况,通过PLC程序实现提升机的紧急停止。
5.温度保护控制:对提升机电机进行温度检测,一旦温度过高,通过PLC程序发出警报信号并停止提升机的运行。
6.超载保护控制:对提升机进行负载检测,一旦检测到负载超过额定负载,通过PLC程序发出警报信号并停止提升机的运行。
7.撞击保护控制:安装撞击传感器,一旦检测到撞击信号,通过PLC程序发出警报信号并停止提升机的运行。
8.状态监测与显示:通过PLC程序实时监测提升机的运行状态,如电机转速、负载情况等,并通过显示器显示相关信息。
目录引言................................................ 错误!未定义书签。
第一章传统矿井提升机电控系统. (2)1.1 传统矿井提升机电控系统概述 (2)1.2 矿井提升机电控系统的组成 (2)1.2.1 TKD-A电控系统的主回路 (2)1.2.2 TKD-A电控系统的控制系统 (3)1.3 提升机电气控制方式 (6)1.3.1 提升机运行速度图 (6)1.3.2 提升机的运行过程 (7)1.4 传统矿井提升机电气控制系统存在的问题 (12)第二章电控系统PLC改造设计 (13)2.1电控系统PLC改造的意义 (13)2.2电控系统PLC改造总体方案 (13)2.3 PLC控制系统的组成及各部分的功能 (15)2.3.1 PLC控制系统的组成 (15)2.3.2 PLC控制系统各部分的功能 (15)2.4 PLC的选择及I/O点的分配 (16)2.4.1 PLC的选择 (16)2.4.2 确定系统的输入设备和输出设备 (16)2.4.3 S7-300 PLC接线图 (18)2.4.4 PLC与其他原元件的对应关系 (18)2.5 PLC电控系统原理设计 (23)2.5.1 主控逻辑电路 (24)2.5.2 可调闸动力制动电路 (24)2.5.3 信号检测控制仪电路 (26)2.5.4 加速电阻切换接触器柜 (27)2.5.5 高压换向动力制动切换柜 (27)2.5.6 动力制动电源 (28)2.6 工作过程介绍 (28)2.6.1 开车前准备 (28)2.6.2 速度图的实现 (28)2.6.3 各阶段的实现 (29)2.7 结构化程序编制 (31)2.7.1 软件结构 (31)2.7.2结构化梯形图程序编制 (31)2.7.3 语句表程序编制 (3232)第三章工艺设计 (33)3.1 设备平面布置示意图.......................... 错误!未定义书签。
基于plc的矿井提升机调速控制系统设计摘要:本文主要介绍了基于 PLC 的矿井提升机调速控制系统的设计及其实现。
该系统采用了三菱 FX3U 系列 PLC 作为控制主机,利用变频器对提升机的电机进行控制,实现了电机的有序启停和调速功能。
通过对系统进行仿真和实际测试,证明了该系统的稳定性和可行性,具有较高的应用价值。
关键词:PLC,提升机,调速控制,变频器1.引言矿井提升机作为矿井井下运输系统中的一种主要设备,其稳定性和可靠性对矿山产能和生产效率具有重要影响。
目前,国内外矿井提升机控制系统的设计和研发已经得到了广泛的关注和开发,通过对传统矿井提升机控制系统进行升级和改进,不仅可以大幅提高矿井提升机的运行效率,还可以降低管理成本、提高安全性。
本文基于 PLC 技术,设计了一种可控的矿井提升机调速控制系统。
该系统利用 PLC 控制器和变频器对提升机的电机进行控制,实现了提升机电机的有序启停和调速功能。
通过对该系统进行仿真和实际测试,证明了该系统具有高度的稳定性和可靠性,具有较高的应用价值。
2.系统设计2.1系统结构图 1 所示为基于 PLC 的矿井提升机调速控制系统的结构框图。
系统分为三个部分:上位机、PLC 控制器和提升机电机。
其中,上位机负责控制系统的运行状态和参数设置;PLC 控制器利用变频器对提升机电机进行控制;提升机电机通过传感器检测提升机的运行状态,并将状态反馈给 PLC 控制器。
2.2系统功能该系统主要实现以下功能:(1)控制提升机电机的有序启停和调速功能。
(2)通过传感器检测提升机的运行状态,并将状态反馈给 PLC 控制器。
(3)实现上位机对系统参数的设置和监测。
3.系统实现3.1PLC 编程在本系统中,采用三菱 FX3U 系列 PLC 作为控制主机,使用 GX Works2 编程软件进行编程。
PLC 主要负责控制变频器的输出频率,实现提升机的有序启停和调速控制。
程序流程如下:(1)初始化:读取提升机电机的初始状态;(2)监测信号:通过传感器检测提升机的状态,并将状态反馈给 PLC 控制器;(3)参数设置:上位机通过 Modbus 协议向 PLC 控制器输入控制参数;(4)控制变频器:根据输入的控制参数计算出变频器的输出频率,控制提升机电机的速度;(5)循环:根据变频器的输出频率不断调整提升机的运行状态。
摘要矿井被称作地下矿井系统的咽喉,是井下与地面最重要的通道.矿井提升机承担着矿井与井下人员、矿料、设备等物资运输的重任,是整个矿井系统中的核心部分,矿井提升机的安全可靠运行至关重要。
所以设计一套安全可靠的矿井提升机控制系统具有极大的意义.PLC出现后以其显著优点迅速成为工业生产控制系统的主流发展方向,其可靠性高,抗干扰能力强;编程简单,使用方便;控制程序可变,具有很好的柔性功能完善;扩充方便,组合灵活,极大减少控制系统设计及施工工作量;体积小,重量轻;非常适用“机电一体化"设备。
基于PLC设计矿井提升机控制系统,极大满足对大型机械控制安全与可靠性的要求,且节能环保,便于操作与维护。
关键词:矿井提升机;PLC;控制系统.AbstractThe mine is called the throat of the underground mine, which is the most important channel of the underground mine。
The mine hoist bears the heavy responsibility of the mine and the underground personnel,the ore material,equipment and so on。
It is the core part of the entire mine system,and the safe and reliable operation of the mine hoist is very important。
Therefore, it is of great significance to design a safe and reliable control system of mine hoist。
PLC appears with its remarkable advantages quickly become industrial production control system of the mainstream of the development direction of, the high reliability, strong anti—interference ability; programming is simple, easy to use;variable control procedures,with perfect good flexible function;to facilitate the expansion,flexiblecombination,greatly reducing the control system design and construction work;has the advantages of small volume, light weight;very applicable electromechanical integration equipment。
总第214期2021年第2期机械管理开发MECHANICAL MANAGEMENT AND DEVELOPMENTTotal214No.2,2021自动化技术与设计D01:10.16525<l4-1134/th.2021.02.090基于PLC的煤矿提升机控制系统设计张旭(晋能控股煤业集团有限公司马脊梁矿,山西大同037027)摘要:为提高煤炭生产安全性和高效性,进一步提高煤矿生产自动化水平,设计了基于PLC的煤矿提升机控制系统。
通过研究变频器控制原理,完成硬件电路设计和软件程序优化实现对提升过程的控制、ModBus通信及监控功能,通过增加过载、超速等监测装叠,提高煤矿井下生产设备控制系统稳定性和安全性。
关键词:煤矿提升机PLC控制中图分类号:TD421.5文献标识码:A文章编号:1003-773X(2021)02-0206-03引言煤炭作为我国主要能源来源,其安全高效生产对于能源安全至关重要,煤矿提升机作为煤炭开采运输的重要组成部分,担负着矿井上下人员快速安全运输的重要任务切。
机械化采煤装置的大规模使用进一步提高了煤矿生产效率和自动化水平,并极大地节省了人力物力,同时随着生产水平的提高,对控制系统的安全性和可靠性要求进一步提高,传统继电控制系统主导的控制系统难以满足生产需求閃。
为了进一步提高煤矿提升机系统控制的自动化水平,增强煤炭生产运输过程的精确性和可靠性,需要使用PLC数字控制技术,其具有编程语言直观、抗干扰能力强、系统稳定性好、便于功能添加等优点,更适应于煤矿井下的复杂生产环境。
1控制系统整体方案为确保提升工作安全进行,煤矿提升机系统(见图1)主要由以下6部分组成:执行单元、减速单元、制动单元、润滑单元、电子控制单元和保护单元等,其中执行单元由轴承、卷筒及其附属基座等结构构成,主要完成负载力矩输出并达到提升物品的目的;减速单元通过调节齿轮转速转比,完成输出力矩的调节,从而调整提升速度;制动单元作为平稳控制执行单元停止的装置,主要由盘式制动器组成;润滑单元控制润滑油的输送量完成系统整体运行摩擦力和设备温度的调节工作,保证设备的机械性能满足运行要求并提高其使用寿命叫电子控制单元在传感器采集数据的基础上,对提升机的位置、速度等当前状态信息进行判断,利用既定策略完成对提升机的启动、运行、停止的控制;保护单元通过旋转编码器等装置检测当前系统状态,防止发生失速、超载等故障,保证系统运行安全凶。
矿井提升机plc控制系统设计摘要矿井提升机制动系统,是矿井提升系统的安全保障环节,对矿井提升生产效率和工作性能都有着重要意义。
矿井提升机制动系统由液压站和制动器两部分组成,其制动性能直接影响到提升系统的稳定性与安全性。
矿井提升机制动系统的可靠性和准确性是矿井提升和安全运行的重要保证。
目前,提升机制动系统多采用盘式制动器,盘式制动器的制动力由液压泵站提供。
本文对提升机制动系统中液压站和制动器的结构组成及工作原理进行了简单的介绍,同时对相关参数进行计算,总结了提升机制动系统制动性能的评判要求,以及影响制动性能的主要因素。
为了保证液压泵站的安全运行,便于操作人员掌握工作状况,本文设计了提升机制动控制系统。
关键词:盘式制动器;液压站;安全目录1.引言 (1)1.1研究背景及意义 (1)1.2国内外研究现状 (2)2.矿井提升机制动系统 (3)2.1提升机液压系统的组成与工作原理 (3) (3) (4) (5)2.2提升机盘式制动器的结构与工作原理 (6) (6) (7)2.3制动性能及其影响因素 (7) (7) (9)2.4系统硬件部分 (10)2.5系统软件部分 (11)3.结语 (12)参考文献 (14)致谢 (16)1.引言1.1研究背景及意义在煤矿企业生产过程中矿井提升机是十分关键及重要的设备之一,其主要功能是提升矿物以及升降人员,担负着采矿生产活动正常运行的重要任务,占有极其重要的地位。
提升机在运行时的安全性及可靠性是由其制动性能的优劣决定的。
在工作运行过程中矿井提升设备遇到故障,而没有采取有效地紧急制动措施,这种情况将导致的后果不仅是提升机设备自身损坏,而且极大的可能会造成人员伤亡的严重事故。
根据以往提升机出现故障事故的不完全统计结果分析,60%以上的提升故障都是由于制动系统出现问题而造成的。
国内煤矿到目前为止因为提升机制动系统故障而造成严重事件的例子有相城煤矿中的主斜井提升机就是由于制动系统在紧急制动过程中产生的制动力矩过大,断绳事件多次出现;而石台煤矿主井的提升机上由于没有及时保养清理,其制动盘出现过多的油污,导致在紧急制动过程中产生的制动力矩过小,在工作运行中致使重载箕斗坠入井底,导致了生产不能正常进行及巨大的经济损失。
现在矿井提升机完成制动作用,主要是靠液压站及制动器两部分共同作用完成的。
液压站与制动器的完美配合,及时有效地完成提升机制动系统正常的工作制动、紧急制动和调绳的功能。
提升机制动系统制动性能的优劣直接影响提升机运行时的稳定性和可靠性。
在紧急制动过程中,若盘式制动器产生的制动力矩超标,紧急时的减速度超过规定的自然减速度,提升系统中的钢丝绳将会发生松绳现象,这种情况会引起冲击断绳及跑车的严重事故;相反使制动力矩过小,在限定的距离中不能使提升系统停止运行,这样会导致提升机的过卷过放的严重事故。
影响矿井提升机制动性能的因素有很多,如制动盘的碟形弹簧刚度,闸瓦间隙,油压,温度变化,工作腔残压,闸瓦摩擦系数,制动盘偏摆度等,在紧急制动过程中制动引起的抖动同样是需要解决的制动振动和噪声中的一个问题,如果处理不好将会导致重大的质量问题。
因此,为保证提升设备能够安全可靠地运行工作,除了在对现场实际工作运行状态的动态监测外,最重要的是在于优化设计时使其制动系统能够进行及时精密有效地控制,当遇到紧急情况时候,可以依赖于优秀的制动性能进行减速停车,使事故发生的情况减少,更好的情况就是避免发生事故,以保证煤矿生产的安全性。
根据相关研究得出,与提升机制动性能相关的因素很多而且复杂,并且有可能在不同的工况下产生一定的变化,因此在深入理解并分析提升机制动系统工作原理的基础上,对影响制动性能的重要参数进行分析,建立制动系统的数学模型并利用软件完成动力学仿真分析,为完善制动系统制动性能提供优化方法与依据。
因此,开展对提升机制动系统动态特性仿真分析及试验研究,可及时检查出机构设计的合理性,并进行完善,防患于未然。
1.2国内外研究现状矿井提升机的盘式制动器在国外获得了良好的发展,液压盘式制动器的泄漏情况改善很多,同时改良了制作闸瓦的材料,获得更好的摩擦系数以及在高温情况下的耐磨性能高,因此在矿井提升机中通常都是使用液压盘式制动器,在紧急制动控制方式上,对其进行安全制动时通常采用分级制动,一般使用二级制动,为了到达更好的制动性能,甚至采用三级制动的方式,这样提高了矿井提升机制动性能,达到了提升货物和升降员工的使用要求。
同时,国外的提升机制造公司在新的提升机设计制造中不断更新采用各种高新技术来提高提升机的整机性能以及安全性能。
运用的新技术有:采用电动机拖动与控制的技术准确性更高,更加有效,提高的提升设备的自动化水平,甚至不需要安排专门的值班员工在司机岗位;采用的液压盘式制动器性能更好并更新应用了恒压减速制动的液压系统控制方式,提升机运行的平稳性和停车的精准性得以提高;运用功能齐全的矿井提升机运行工况在线监测系统,通过在线监测提升机运行参数,不仅可以在超量时及时地进行报警,而且还可以进行自动调节排除故障等。
矿井提升机生产企业在研制一种新提升机或者优化现存的提升机时,总是首先考虑提升机运行的安全性以及保证制动系统的可靠性要高。
提升机制动系统的制动性能是采矿企业安全及稳定生产的关键保证,主要体现在一下两点:一是制动性能本身可靠性要高,发生故障机会非常低;二是当提升机制动系统发生错误后应该能够依据错误的性质及时采取一定措施进行相应的保护,而且能够将故障的详细内容进行保存并在计算机上显示出来,方便用户迅速准确地排除故障恢复生产。
因此为确保其安全可靠地运行,除了在对实际运行状态的动态监测外,关键在于设计与计算时合理地选择运行状态参数,以及在结构、材质等系统设计上应有较高的可靠性。
矿井提升机的制动系统制动性能的研究,直接关系到提升机的安全运行。
国内对于这类研究相对较少,近几年才有一些科研人员运用虚拟样机技术和动力学仿真技术对提升机制动系统进行了研究。
对于矿井提升机,虽然进行了机械和液压系统的联合仿真,但是仅仅分析制动油压、闸瓦间隙和制动力之间的关系,分析的因素比较局限;将液压系统与机械系统进行耦合仿真,分析了制动油压、闸瓦摩擦系数对制动性能的影响,影响制动性能因素的分析比较单一;对制动盘温度仿真分析,得出温度分布规律和温度随时间的变化关系,未深入分析影响温度分布的因素。
综上所述,影响矿井提升机制动性能的因数有很多,如制动盘的碟形弹簧刚度、闸瓦间隙、使用环境温度变化、工作腔残压、闸瓦摩擦系数、制动盘偏摆度等。
在紧急制动过程中出现的制动引起的抖动同样是影响制动性能的因素,如果不减小抖动问题会导致制动性能不能满足要求。
对于影响提升机制动性能各因素的分析,国内外的研究大都是针对某一个参数进行比较单一的仿真分析,没有系统而全面的整体分析,特别是针对不同的工况下参数对制动性能影响的分析更是少。
为了解决矿井提升机在工作过程中出现的问题,特别是液压系统的参数对矿井提升机制动系统的影响,这需要对制动过程中影响制动性能的各参数进行分析,并建立相关数学模型并进行动力学仿真。
2.矿井提升机制动系统在矿井提升机制动系统中,由液压站和制动器两部分组成,由液压系统产生压力控制盘式制动器,完成提升机的制动过程,因此液压站和制动器的可靠性能都对制动系统的安全性具有决定性作用。
进一步了解制动系统中液压系统和盘式制动器的工作原理有助于深入了解分析影响制动系统制动性能的因素。
2.1提升机液压系统的组成与工作原理(1)油源部分:液压系统中的两套独立工作的油源均是由粗、精过滤器、叶片泵、电机、调压装置及管件等组成,调压装置由电液比例溢流阀8和溢流阀7组成。
为系统提供P=0.5~6.3MPa,Q=14L·min-1的可调压力油源,一用一备。
(2)集油路装置:集油路装置由两个相同的二位三通型电磁换向阀10、11,两个相同的二位二通型电磁换向阀8、9,弹簧蓄能器13和二级制动溢流阀11等组成,为制动系统的A、B管油路提供压力油,紧急电延时二级制动等功能。
即TH118C(2JK矿井提升机)型液压站。
该装置上加装一个油路块及二位三通电磁阀14、单向阀、截止阀,即可为系统提供调绳油缸的离合功能,满足2JTP 矿井提升绞车的调绳功能。
(3)出油过滤装置:该装置由精过滤器及管件等组成。
(1)系统正常工作状态:根据电控系统原理图将相应的电线接好后,启动与油泵相连的电动机,从油泵输出的液压油经过直动型电磁比例溢流阀7流回油箱,当接通两个二位三通电磁换向阀,同时修改电磁比例阀7的输入电流信号时,系统中的油压值就会跟随电磁比例阀的信号输入的改变而变化,A、B管油压将在P=0.5~6.3MPa间呈线性变化。
进而将盘式制动器产生正压力的改变,油压值越低,制动正压力越大。
在提升机正常工作的情况下,液压系统中除了以上元件进行工作以外,其余的液压元件均不会有动作。
(2)系统紧急制动状态:当在设备运行过程中需要实施紧急制动时,提升机的制动系统进入紧急制动过程。
液压系统中的电动机3、电磁换向阀10、11,直动型电磁比例溢流阀7均变为断电状态。
此时,与A管路相连的固定卷筒制动油缸中的油液经过阀11直接返回到油箱,与B管相连的游动卷筒制动器中的液压油则经过阀10被接入二级制动控制油路中,整个系统中的油压大小由溢流阀调节。
二位二通电磁换向阀9在阀10、11断电的同时进入通电状态,使B管路中的油压从最大工作油压下降到溢流阀15调定的压力值P2,经过延时几秒后(按实际工作条件计算出一个调定值),阀9进入通电状态的同时阀8进入断电状态,而此时盘式制动器中的压力油返回油箱,油压从P2直接下降为0。
在弹簧蓄能器中保存的压力油及时地补充了各个阀件的泄漏损失,使B管路中油压P2值在延时过程中保持不变。
完成整个紧急制动过程。
(3)手动紧急回油装置为提升机的安全保护装置,当提升机紧急制动失效后,扳动手动紧急制动中手动换向阀S(H-4WMM6E50)的手柄,使制动器油缸的油迅速泄油,以达到紧急制动。
(1)最大松闸油压值的计算根据实际的静张力差计算相对应的最大油压值。
1.竖井提升的最大油压值的计算:Pmax≥PX+PfPX=2.57KFc/A∙nPf=1.65MPaPmax=2.75KFc/A∙n+Pf式中:Fc——实际最大静张力差,N;A——制动器活塞有效面积,mm2;n——制动器总个数;K——制动器力矩计算系数K=3.25⁄cc=(Fc⁄∑m)×10-1=(Fc∙g⁄∑G )×10-1式中:∑G——整个提升系统的变位重量,kg当0<c<1时,K=3.25⁄c;当1<c时,K =3.252.斜井提升时最大油压值得计算:Pmax≥2.57K1KFc⁄An +1.56式中:K1——斜井倾角影响系数斜井倾角影响系数Tab.2-1 Inclined angle of influence coefficient斜井倾角30°25°20°<20°K1 1 0.89 0.8 0.65(2)二级制动油压值P2的确定1.竖井重物下放时:P2=2PX-(7.8∑G +5.1Fc)⁄An2.斜井重物提升时:双钩提升时:P2=2PX-51.4(∑m1∙a+0.1Fd)⁄An式中:∑m1——不包括提升侧的系统终端负荷变位质量,kg∙s2⁄m。