jlink仿真器问题点
- 格式:docx
- 大小:51.81 KB
- 文档页数:1

J-Link用户指南(本手册适用于V6.0、V7.0、V8.0版本的J-LINK)1.J-Link ARM JTAG 仿真器简介J-Link 是 SEGGER 公司为支持仿真 ARM 内核芯片推出的 JTAG仿真器。
配合 IAR EWARM,ADS,KEIL,WINARM,RealView 等集成开发环境支持所有 ARM7/ARM9 内核芯片的仿真,通过 RDI 接口和各集成开发环境无缝连接,操作方便、连接方便、简单易学,是学习开发 ARM 最好最实用的开发工具。
J-Link ARM 主要特点* IAR EWARM 集成开发环境无缝连接的JTAG 仿真器* 支持所有 ARM7/ARM9 内核的芯片,以及 cortex M3,包括 Thumb 模式* 支持 ADS,IAR,KEIL,WINARM,REALVIEW 等几乎所有的开发环境* 下载速度高达 ARM7:600kB/s,ARM9:550kB/s,通过 DCC 最高可达 800 kB/s* 最高 JTAG 速度 12 MHz* 目标板电压范围 1.2V –3.3V,兼容5V* 自动速度识别功能* 监测所有 JTAG 信号和目标板电压* 完全即插即用* 使用 USB 电源(但不对目标板供电)* 带 USB 连接线和 20 芯扁平电缆* 支持多 JTAG 器件串行连接* 标准 20 芯JTAG 仿真插头* 选配 14 芯 JTAG 仿真插头* 带J-Link TCP/IP server,允许通过 TCP/ IP 网络使用J-LinkJ-Link 支持 ARM 内核* ARM7TDMI(Rev 1)* ARM7TDMI(Rev 3)* ARM7TDMI-S(Rev 4)* ARM720T * ARM920T*ARM926EJ-S*ARM946E-S*ARM966E-S* ARM11* Cortex-M3速度信息RevisionARM7Memory downloadARM9Memory downloadJ-Link Rev. 1-4 150.0 kB/s(4MHz JTAG)75.0 kB/s(4MHz JTAG)J-Link Rev. 5-8720.0 kB/s(12MHz JTAG)550.0 kB/s(12MHz JTAG)J-Trace Rev. 1420.0 kB/s(12MHz JTAG)280.0 kB/s(12MHz JTAG2.J-LINK 驱动安装J-LINK 是本站开发的兼容产品,具有一样的性能,但是却只有十分之一的价格!首先到/download_jlink.html 下载最新的 J-LINK驱动软,J-Link ARM software and documentation pack ,内含USB driver, J-Mem, J-Link.exe and DLL for ARM, J-Flash and J-Link RDI。

如何使用Jink 调试 Mini INS/GPS本文档主要解决以下问题:1. Mini INS/GPS的SWD仿真接口的定义2. Jlink 仿真器如何连接SWD仿真接口3. 如何使用Jflash 下载目标HEX格式文件4. 如何使用J link 仿真和调试程序为了方便用户调试姿态解算程序,Mini INS /GPS 提供了SWD 调试接口。
它只需要4个引脚就可以仿真和调试STM32F 的程序。
1. SWDIO 数据通信引脚2. SWDCLK 时钟引脚3. GND 公共地,需要与仿真器的地连接在一起4. VCC 3.3V 电源,有的仿真器用于检测目标芯片是否已上电。
以下是SWD 仿真接口在Mini INS/GPS 板子上的位置和引脚定义Mini INS /GPS 的SWD 调试接口双色状态指示LEDSWD 调试接口Jlink 仿真器的接口SWD 接口Jlink 仿真器J-Link是SEGGER公司为支持仿真ARM内核芯片推出的JTAG仿真器。
配合IAR EWAR,ADS,KEIL,WINARM,RealView等集成开发环境支持所有ARM7/ARM9/ARM11内核芯片的仿真,通过RDI接口和各集成开发环境无缝连接,操作方便、连接方便、简单易学,是学习开发ARM最好最实用的开发工具。
Jlink 是分版本的,只有Jlink V6 或者更高版本的Jlink 才支持SWD 接口目前市面上的大都是Jlink V8版本,这是完美支持SWD 调试的注意:SWD 数据SWD 时钟目标板电压目标板GND只需连接其中一个就可Mini Jlink 与模块的连线图如下Mini Jlink 的应用Mini Jlink 功能:1.支持SWD调试,支持STM32F系列单片机的仿真2.只需要三条线,就可以进行芯片的下载程序和仿真操作 大大减少IO连接3.兼容 JLink的SWD调试部分。
特别提示:Mini Jlink并不向目标板提供电源,在编程和仿真时,目标板必须自行连接电源Jlink 与 Mini IMU 的SWD接口连接如何使用 Jflash 将已编译好的Hex下载到STM32单片机JFlash是Jlink驱动安装时就已经安装好,专门用于写处理器Flash数据的。

最近一段时间一直在学习STM32和ucos的移植,使用的开发环境是keil u4版本。
仿真器是80元买的jlink。
在学习了STM32固件库和ucos内核与移植相关的程序之后,写了一个流水灯程序,准备下载到板子上看看情况。
哪知程序还没有下进去,在debug时,keil 的错误提示到:Error: Flash download failed-"Cortex-M3"感觉这么错误很普遍,也是初学者常常遇到的错误,下面我就将这个错误产生的原因和解决方法赘述一下:错误产生的原因和分析,解决。
首先,我们看到提示信息是有关flash的,那么我们来查看一下STM32F103XB的数据手册关于这部分的描述(我使用的芯片是STM32F103RB,有128kflash。
)知道了原来flash在此芯片中的地址是从0x0800 0000到0x0801 FFFF 这段,也就是说这段存储空间是用来存储程序。
而在STM32芯片方面,它又有一个规则,那就是芯片启动的方式,如果你把程序下载到了flash中,那么在复位芯片之前或者通电之前,要将boot0,boot1两个引脚拉到高电平,这样在启动时,芯片初始化之后,运行程序代码才是从flash 地址开始执行的。
于是,我们来查看一下keil中仿真器的设置,是不是正确,设置的选项在keil软件的project-options for target中的Utilities中,先来查看下仿真器是否选对,然后点settings,弹出如下菜单:查看一下programming Algorism 下的flash地址是否正确,如果不正确则会引起开始那个错误的提示信息,如果正确还是出现那个错误,那么按照官方给的解决方法是,删除现有的flash 地址,重新配置一下,记得要选对芯片型号和地址空间。
配置好之后点击OK退出。
然后再查看一下Target中的地址,是否跟你重新添加的一致,如果一致,那么点OK退出。
首次烧写程序后j-link无法识别的解决方法“首次烧写程序后jlink无法识别的解决方法”一、背景介绍(300-500字)Jlink是一种广泛应用于嵌入式系统开发的调试器和编程器。
它可以通过USB接口连接到目标板,实现对目标板的烧写程序、调试和硬件测试等功能。
然而,有时在首次烧写程序后,可能会出现jlink无法识别目标板的情况,导致无法继续进行调试和其他操作。
本文将针对首次烧写程序后jlink无法识别的问题提供一系列解决方法,以帮助读者解决这一常见的问题。
二、问题分析(500-1000字)1.硬件连接问题首先,我们需要确认硬件连接是否正确。
检查目标板的供电情况,确保其已经正确连接到jlink,并且使用的是可靠的连接线。
有时候,连接线松动或损坏会导致jlink无法识别目标板。
2.驱动程序安装问题jlink需要在计算机上安装相关的驱动程序才能正常识别目标板。
首先,我们需要检查是否正确安装了jlink的驱动程序。
可以尝试重新安装驱动程序,或者更新到最新版本的驱动程序。
同时,确保驱动程序与操作系统的版本兼容性。
3.固件版本问题jlink设备本身也有固件版本,不同的固件版本可能会对目标板的识别有影响。
如果出现无法识别的问题,可以尝试升级jlink的固件版本,或者降低固件版本至与目标板兼容的版本。
4.目标板设置问题在烧写程序之前,我们需要在目标板上进行一些设置,以确保jlink能够正确识别它。
常见的设置包括将目标板设置为jlink模式、选择正确的接口和速率等。
请参考目标板的用户手册,了解如何正确设置目标板以与jlink进行通信。
5.软件配置问题使用jlink进行调试和烧写程序时,还需要正确配置相关的软件工具。
确保所使用的软件工具已经正确配置,并且选择了正确的连接器(Linker)和目标板(Target)。
例如,在Keil等集成开发环境中,需要正确选择jlink作为目标板调试的工具。
6.硬件故障问题最后,我们还需要考虑可能存在的硬件故障问题。

KEIL4环境,使用Jlink仿真器调试M3说明1.安装keil4首先要安装集成开发环境KEIL4MDK,这是ARM公司最新的调试软件,我们提供的工程例程都在KEIL4MDK开发环境下,调试通过!2.安装jlink驱动,驱动位于光盘的工具软件文件夹里,目前稳定的版本是JLinkARM_V408i。
用户只需一步步安装即可,安装过程中不需要任何设置!安装完成后出现下图的可用快捷方式!下边接收几个很有用的:1.)J-Flash ARM:这是一个单独的程序烧写软件,J-Flash ARM配合Jlink仿真器可以完成绝大多数ARM芯片或扩展FLASH的烧录工作!2.)J-Link GDB Server:打开这个软件,同时连接上开发板,就可一看到目标板MCU 内核和目标板电压!3.)J-Link Commander:打开这个软件之前电脑要先连接jlink,可以看到jlink的硬件版本和序列号!3.Keil4仿真调试配置打开你要调试的工程(就是实验例程,请注意每个工程都可单独配置,KEIL4MDK工程一般是工程名+.uvproj的方式存在的),工程打开后,出现下边的界面:我们提供了两种调试模式:内部flash调试和内部SRAM调试!我们首先要选择调试模式,是在内部flash调试还是内部SRAM调试。
用户可以在下图的位置选择调试模式:每颗芯片的RAM相对FLASH来说,都较小,所以如果程序量超过RAM的范围,请选择flash调试模式!选择完调试模式后,接着配置该调试模式下的参数!点击下图所示图标或者点击Flash--Configure Flash Tools......,如下图所示点击后,会打开下图所示的配置窗口首先选择CPU型号,比如:LPC1768等,接着进行Target配置!见下图所示:如果用户选择flash调试模式,可以参考下图配置!主要是点√的选项后边设置!如果是在sram内部调试,就要选择见下图设置!下边进行Output设置,这一部可以设置输出文件和输出文件的名字,具体设置见下图所示空白框内,可以填写输出文件的名字,上图填的是“BUZZER”。

MDK 3.50下用J-Link 的SWD(两线)仿真的教程其实在调试仿真的时候用J-LINK的Cortex-M3方式已经足够,并且在MDK 下他的功能已经做得非常的好,用标准20脚的JTAG下载,速度是非常的快,一般初学者都是这样做的。
但是SWD方式似乎速度更快、更加方便、简捷、,对于项目中对板子空间要求严格、I/O口资源紧张的用户来说更加的有利,正常的JTAG需要20管脚,而J-Link 的SWD只需要2根线(PA13/JTMS/SWDIO、PA14/JTCK/SWCLK)就够了(加上电源线也就4根),这样就节省了3个I/O口(PA15/JTDI、PB3/JTDO、PB4/JNTRST)为其它所用,并且可节省一部分板子的空间(只需4个口就可以了)。
下面我说一下SWD两线仿真的一些步骤、注意事项及需要注意的问题。
首先说一下接口的连接:将JLINK的1、7、9、20分别与自己的开发板上JTAG的VCC、JTMS、JTCK、GND用杜邦线相连即可!1)SWD 仿真模式概念简述先所说 SWD 和传统的调试方式有什么不一样:首先给大家介绍下经验之谈:(一): SWD 模式比 JTAG 在高速模式下面更加可靠. 在大数据量的情况下面 JTAG 下载程序会失败, 但是 SWD 发生的几率会小很多. 基本使用 JTAG 仿真模式的情况下是可以直接使用 SWD 模式的, 只要你的仿真器支持. 所以推荐大家使用这个模式.(二): 在大家 GPIO 刚好缺一个的时候, 可以使用 SWD 仿真, 这种模式支持更少的引脚.(三): 在大家板子的体积有限的时候推荐使用 SWD 模式, 他需要的引脚少, 当然需要的 PCB 空间就小啦.比如: 你可以选择一个很小的 2.54 间距的 5 芯端子做仿真接口.(2) 仿真器对 SWD 模式支持情况再说说市面上的常用仿真器对 SWD 仿真的支持情况.(1) JLINKV6 支持 SWD 仿真模式. 速度较慢.(2) JLINKV7 比较好的支持 SWD 仿真模式, 速度有了明显的提高. 速度是 JLINKV6 的 6 倍.(3) JLINKV8 非常好的支持 SWD 仿真模式, 速度可以到 10M.(4) ULINK1 不支持 SWD 模式(5) 盗版 ULINK2 非常好的支持 SWD 模式. 速度可以达到 10M.(6) 正版 ULINK2 非常好的支持 SWD 模式. 速度可以达到 10M.再所说硬件上的不同:(1) JLINKV6 需要的硬件接口为: GND, RST, SWDIO, SWDCLK(2) JLINKV7 需要的硬件接口为: GND, RST, SWDIO, SWDCLK(3) JLINKV8 需要的硬件接口为: VCC, GND, RST, SWDIO, SWDCLK(4) ULINK1 不支持 SWD 模式(5) 盗版 ULINK2 需要的硬件接口为: GND, RST, SWDIO, SWDCLK(6) 正版 ULINK2 需要的硬件接口为: GND, RST, SWDIO, SWDCLK由此可以看到只有 JLINKV8 需要 5 个引脚. 那么给大家介绍下为什么有了 VCC 这个引脚时候有好处, 我的个人理解: 我认为有这个引脚是最合适的, 仿真器对目标板子的仿真需要用到 RST 引脚, 其实使用仿真器内部的 VCC 做这个功能其实并不是非常美妙. 因此 JLINKV8 选择了只和目标板共 GND, 但是不共 VCC. 因此我觉得这种模式最合理, 当然通常情况下仿真器和目标板共 GND 和 VCC 是没有错的。

目录:一、SWD实时仿真硬件电路1、SWD实时仿真接线2、注意二、仿真设置三、仿真时问题的解决(Keil5.12)1、仿真时添加变量或数组2、程序下载1)程序下载完成后,J-LINK使单片机处于复位状态 2)读保护与写保护3)尽量不要由J-Link给线路板供电,内部有短接4)勾选2处不能烧写的设置3、仿真器与线路板连接需可靠4、使用J-Link时,Keil软件出现无响应5、出现“USB无法连接”提示(实记JLink-V8刷固件方法)6、出现“***JLink Error: Can not read register 17 (MSP) while CPU is running”提示四、STM32芯片通过J-Flash解除写保护五、J-Link下载Hex文件1、简述2、与J-Link相关的设置3、烧写文件载入与连接目标4、问题总结1)可连接成功,擦除失败----------------------------------------所有的操作基于WIN XP,STM32使用J-Link(SWD模式),另可参见“Keil编译软件的使用汇总之三、Keil5.12错误的处理”。
-------------------------------------------------------------------------------------------------一、SWD实时仿真硬件电路1、SWD实时仿真接线---------------------------------------------2、注意JTMS、JTCK外接电路中不能有电容。
也可不用RST端,在STM32F407VET6中实际仿真,速率要降低,我最多到1MHz,如下图。
速率高了Keil 5中出现“SYSRESETREQ has confused core. Trying to reconnect and use VEC”提示。
-------------------------------------------------------------------------------------------------二、仿真设置J-LINK的SWD仿真时,对单片机口线的设置void KEY_Init(void){GPIO_InitTypeDef GPIO_InitStructure;GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable,ENABLE);//关闭JTAG,否则增加PBin(3)键失效//GPIO_PinRemapConfig(GPIO_Remap_SWJ_Disable,ENABLE);//设置为GPIO_Remap_SWJ_Disable,表现为找不到芯片;有时能找到芯片,但程序执行到KEY_Init()函数会停住,或者//报“CPU_REG_SET():Register 0 is already marked as valid.”//设置为GPIO_Remap_SWJ_JTAGDisable即可解决此问题。

E-Link用户指南编制支持:嵌入式联盟()2011年6月目录1. E-Link ARM JTAG仿真器简介 (3)2. E-LINK驱动安装 (5)3. E-LINK在各个主流开发环境下的设置 (8)3.1. K eilMDK开发环境 (8)3.2. A DS开发环境 (12)3.2.1 E-LINK 在ARM11 (Tiny6410/Mini6410)上的调试 (22)3.3. I AR开发环境下使用E-Link (26)4. J-FLASH ARM使用设置 (36)附录:E-LINK 与 J-LINK V8 对比 (43)1. E-Link FOR ARM仿真器简介E-Link FOR ARM(本文中简称E-Link), 是专为ARM开发设计爱好者调试、仿真以及下载(Debug & download )而推出的JTAG 仿真调试工具。
作为一款专用的ARM JTAG仿真器,E-LINK兼容目前市面大多数JLINK仿真器功能,可配合IAR EWARM,ADS,KEILMDK,WINARM,RealView 等集成开发环境,支持了几乎所有的ARM7/ARM9/ARM11 内核芯片的仿真,通过RDI 接口和各集成开发环境无缝连接,E-LINK突出的亮点之一——支持全自动固件升级,堪称完美地解决了困扰广大学习开发者的固件升级问题。
连接、操作极为方便,易于上手。
E-LINK适用于当前各类主流ARM开发板的仿真调试,是学习开发ARM最具实用价值的开发工具。
可直接使用于各类STM32,2440,6410系列开发板,能够与友善之臂 mini2440/micro2440/ mini6410/Tiny6410,飞凌FL2440/OK6410,华天正Real6410 等产品完美配合。
E-Link 基本介绍如下图所示:* E-LINK 的内部全部采用原装进口芯片,如 CPU,双缓冲,USB口保护电路,ESD ,自动恢复保险丝,包括3.3V电源芯片等; E-LINK的外部结构采用红色铝合金金属外壳。
如何辨别真假JLINK V8仿真器
2010-6-25
市场上有许多JLINK V8是仿造的,但有的是V7改装的,或者有许多关键之处与原版不同,主要有哪些不同呢,我大概列出来一下
(1) 原版为4个排阻;现在市面
上出现许多3个排阻的仿品,
原版JLINK V8此处应该是有
4个排阻,本店所有JLINK产
品也都为4个排阻,如果出
现某些处理器不能仿真的情
况,敬请查看此处是否为3
个排阻的版本!
(2) 是否为双BUFFER,应为飞利浦的
(3) 是否可以用POWER ON命令让JLINK V8对目标板子供
电
(4) 是否有这个跳帽,可以通过拔掉跳帽,对目标板进行
3.3V供电
(5) 是否具备ESD等双保护
(6) 是否有与原版一样的3处关键标志,这个代表产品文化是
否源自原版系列
(7) 其他细节其实还有很多,不过关键有这几点应该已经足
够分辨了。


【原创】Jlink在ADS下的配置说明及常见问题解决办法Jlink在ADS下的配置说明及常见问题解决办法Zhaoxj参考⽂档:*1、TQ2440开发板使⽤⼿册V3.2_20121203.pdf2、JLINK ADS 2440.pdf注:1、本说明是针对S3C2440⽽写的。
其他的配置基本⼀样,就是型号要改。
我会在⽂章中说明,反正出现的问题都差不多。
2、针对裸板开发及笔记本的J-Link与开发板的连接及配置的⼀些问题进⾏总结跟解决。
裸机下开发软件⽤的是ARM Developer Suitev1.2(ADS)。
3、重点在于JLink 的配置问题上,把我遇到的问题说明,欢迎补充!最近搞了好⼏天的J-Link调试,找开发板的技术也没解决。
在⽹上找了好多⼈家的经验。
把⾃⼰⼀步⼀步的问题都解决了。
其实还是卡在了最后⼀步上,⽹上也搜不到这样的问题,估计也是偶然性的问题,最后算是凭着运⽓搞定了吧。
⽆⽐欣喜。
我想对S3C2440⽤ADS开发及J-Link调试下的⼀些注意点做⼀下总结,也希望对看到的⼈有所帮助。
欢迎分享!⼀、编译源代码、⽣成bin软件:ADS1.2 很简单,没什么要注意的。
最后破解⼀下就可以。
装完后在开始菜单下有⼀个ARM Developer Suite v1.2⽬录,打开,我们⽤的是⾥⾯的第⼀AXD Debugger(AXD)跟第⼆个CodeWarrior for ARM Developer Suite(IDE),IDE就是源代码编译⽣成bin的。
1、 IDE相关配置a、新建⼯程,选可执⾏镜像。
再新建或直接添加代码。
代码的管理也很简单。
*b、建好的⼯程下有⼀个***.mcp(mcp是⼯程名,以后直接打开它即可,也可以直接拖拽)的窗⼝,点击DebugRel Setting(我们这⾥默认的是DebugRel,⽣成的bin⽂件也在那⾥⾯)在弹出的设置对话框⾥做如下设置:1、 Target->Target Setting要改Post-Linker(ARM fromELF)2、Language Setting ⾥都改成ARM920T,其他型号的内核也做相应的改动。

E-Link用户指南编制支持:嵌入式联盟()2011年6月目录1. E-Link ARM JTAG仿真器简介 (3)2. E-LINK驱动安装 (5)3. E-LINK在各个主流开发环境下的设置 (8)3.1. K eilMDK开发环境 (8)3.2. A DS开发环境 (12)3.2.1 E-LINK 在ARM11 (Tiny6410/Mini6410)上的调试 (22)3.3. I AR开发环境下使用E-Link (26)4. J-FLASH ARM使用设置 (36)附录:E-LINK 与 J-LINK V8 对比 (43)1. E-Link FOR ARM仿真器简介E-Link FOR ARM(本文中简称E-Link), 是专为ARM开发设计爱好者调试、仿真以及下载(Debug & download )而推出的JTAG 仿真调试工具。
作为一款专用的ARM JTAG仿真器,E-LINK兼容目前市面大多数JLINK仿真器功能,可配合IAR EWARM,ADS,KEILMDK,WINARM,RealView 等集成开发环境,支持了几乎所有的ARM7/ARM9/ARM11 内核芯片的仿真,通过RDI 接口和各集成开发环境无缝连接,E-LINK突出的亮点之一——支持全自动固件升级,堪称完美地解决了困扰广大学习开发者的固件升级问题。
连接、操作极为方便,易于上手。
E-LINK适用于当前各类主流ARM开发板的仿真调试,是学习开发ARM最具实用价值的开发工具。
可直接使用于各类STM32,2440,6410系列开发板,能够与友善之臂 mini2440/micro2440/ mini6410/Tiny6410,飞凌FL2440/OK6410,华天正Real6410 等产品完美配合。
E-Link 基本介绍如下图所示:* E-LINK 的内部全部采用原装进口芯片,如 CPU,双缓冲,USB口保护电路,ESD ,自动恢复保险丝,包括3.3V电源芯片等; E-LINK的外部结构采用红色铝合金金属外壳。

Jlink V8无法识别的USB设备及提示Jlink 为clone版本Keil闪退的解决办法注1:本文吸取了网上各种解决方案,总结而成,感谢各位大侠。
欢迎大家继续完善。
注2“由于作者技术所限,几经测试64bit的操作系统始终无法完成硬件识别及刷机过程,建议除非是大侠,否则不要再用64bit的操作系统尝试了,在这个问题上执着,犯不上,浪费时间。
用32bit的电脑来做这件事吧。
2016.09.25现在我们用的Jlink大部分都是山寨版的,有时候不知为什么就不工作了,出现各种各样的问题,让人好不耐烦,甚至失去学习AMR的勇气,主要的问题总结如下两条:1.windows提醒我们插入的是无法识别的USB设备。
这是因为Jlink中的固件丢失了或者坏掉了(盗版产品的通病),这个时候我们只能把它擦除重新写入固件, Jlink才可以正常的工作。
2.使用Keil MDK 高版本时在配置仿真工具时,由于Keil集成的ARM驱动版本过高(高版本的ARM驱动里现在集成了clone验证)提示Jlink为clone品,Keil开发环境闪退。
以上两者的解决方案目前来看只能是擦除Jlink固件,重新烧写高人的翻墙固件才能解决,是否能彻底解决,有待时间检验。
具体解决过程如下:1固件刷机工具准备可以选择安装如下二者之一:◆安装Install AT91-ISP v1.13.exe 软件(可支持的系统WIN XP WIN7 32bit)win7 64bit找不到驱动,双击Install AT91-ISP v1.13.exe 运行,选择默认设置,安装好以后,桌面上生成如下两个图标:◆安装sam-ba_2.14.exe,安装成功后,桌面会出现如下图标:(建议方案)2Jlink固件擦除操作1、先短接图中ERASE 处的两个过孔。
再使用USB 线连接JLINK 与PC机,以提供JLINK 工作电源。
(如果此时灯没有灭,则来回插拔USB口,直至灯灭),灯灭之后,再等大约5 秒后断开ERASE 位置的两个过孔的短接。
Cepark Jlink调试总结Wkuang 2011-7-9 上周三,电子园老李给我打电话,看我有没有时间调试下电子园的Jlink。
我回答没问题,最近比较闲一点。
周一就收到电子园老李给我发过来Jlink套件包裹,打开一看,里面东西真不少,有51,avr最小系统套件,USB转串口套件,一个成品USB转串口,一个烙铁。
老李说用这些东西来给我练手用,呵呵。
在这里先谢谢电子园。
说说Jlink调试吧,周四,我把PCB带到公司,首先检测一下几个电源和地有没有短路的情况,板子电源和地都正常。
第一次焊接QFP64器件时,芯片引脚处的焊锡就黏在一块不流动,我把温度调到400读都不行,没办法只能换换个位子换到另外一个焊台去。
不换不知道,一换吓一跳啊,新换的焊台非常给力,五分钟把两个贴片芯片搞定(后来才知道我用的第一个焊台是坏的),其他的事情留到周六来办。
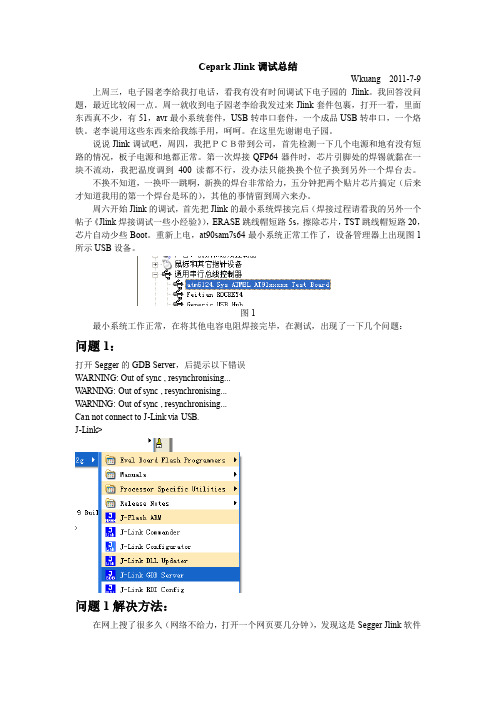
周六开始Jlink的调试,首先把Jlink的最小系统焊接完后(焊接过程请看我的另外一个帖子《Jlink焊接调试一些小经验》),ERASE跳线帽短路5s,擦除芯片,TST跳线帽短路20,芯片自动少些Boot。
重新上电,at90sam7s64最小系统正常工作了,设备管理器上出现图1所示USB设备。
图1最小系统工作正常,在将其他电容电阻焊接完毕,在测试,出现了一下几个问题:问题1:打开Segger的GDB Server,后提示以下错误WARNING: Out of sync , resynchronising...WARNING: Out of sync , resynchronising...WARNING: Out of sync , resynchronising...Can not connect to J-Link via USB.J-Link>问题1解决方法:在网上搜了很多久(网络不给力,打开一个网页要几分钟),发现这是Segger Jlink软件的一个bug,以下是官方的答复SEGGER - AlexSuper ModeratorHi,the problem has been fixed in V4.20d which is planned to be released today.Best regards问题2我打开MDK,进入仿真器调试模式,选择Jlink,开始调试,出现如下警告界面,TCK 必须为高电平,让我检测我的目标板问题2解决方法:这个问题让我很纳闷,因为我开发板没有问题,这个Jlink的警告是让我检测开发板的硬件。

用JLINK V6 调试STM32的教程相关配置:开发板用的是万利的STM3210B-LK1JLINK用的是出品的全功能JLINK V6.0编译调试环境为:IAR EWARM 4.42AJLINK 驱动用的是3.86g下载地址:/product/jlink/Setup_JLinkARM_V386g.zip针STM3210B-LK1评估板需要改动或设置的地方有3点:第一:STM3210B-LK1评估板的BOOT0及BOOT1跳线请跳到0位置.第二:STM3210B-LK1评估板上的JTAG接口的第1,2脚请接上3.3V(手工飞线)。
第三:JLINK 用SWD方式调试此款板子时,需要把板子上的R4,R5断开(因其板子上有STLINK II)否则调试不成功哟目录一设置仿真器类型----JLINK或JTRACE二 JLINK仿真器相关设置三 JTAG/SWD 两种方式的调试一设置仿真器类型----JLINK或JTRACE安装好Manley板子的例程用LCD DemoD:\Manley\EKBoard\EKSTM32F\LCDDemo(lcd+led+buttom)\LCDDemo\project\EWARM菜单:Project->optionsProject->options ->Debugger->Setup->Driver 选JLINKProject->options ->Debugger->Download 二 JLINK仿真器相关设置下面的设置可以用默认:设置完OPTIONS点OK退出设置。
重新编译工程:接下来进入仿真试试。
一般万利的板子用的是STLINK II,以前的FLASH LOADER要重新设置,否则有可能下载不成功。
原因是flash loader的问题。
删除:新建后,点OK退出即可。
进入仿真器设了5个断点分别全速运行到断点处。
注:CORTEX M3只支持6个硬件断点,三 JTAG/SWD 两种方式的调试JTAG方式:用SWD方式调试STM32设置SWD方式Project->options ->J-Link/J-Trace->connection->interface 中选择SWD。
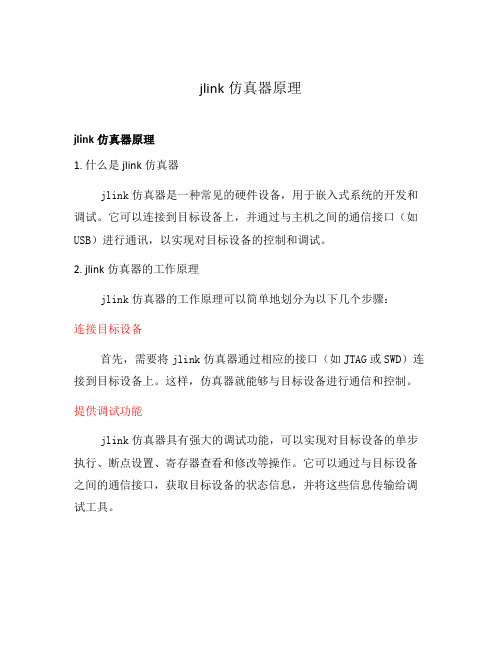
jlink仿真器原理jlink仿真器原理1. 什么是jlink仿真器jlink仿真器是一种常见的硬件设备,用于嵌入式系统的开发和调试。
它可以连接到目标设备上,并通过与主机之间的通信接口(如USB)进行通讯,以实现对目标设备的控制和调试。
2. jlink仿真器的工作原理jlink仿真器的工作原理可以简单地划分为以下几个步骤:连接目标设备首先,需要将jlink仿真器通过相应的接口(如JTAG或SWD)连接到目标设备上。
这样,仿真器就能够与目标设备进行通信和控制。
提供调试功能jlink仿真器具有强大的调试功能,可以实现对目标设备的单步执行、断点设置、寄存器查看和修改等操作。
它可以通过与目标设备之间的通信接口,获取目标设备的状态信息,并将这些信息传输给调试工具。
与调试工具通信jlink仿真器需要与调试工具进行通信,以实现对目标设备的控制和调试。
调试工具可以是IDE(集成开发环境)中的调试器,也可以是命令行工具。
传输数据jlink仿真器通过与主机之间的通信接口,与调试工具进行数据传输。
它可以接收来自调试工具的指令和数据,并将其传输到目标设备上。
同时,它还可以从目标设备获取执行结果和状态信息,并将其传输给调试工具。
与目标设备交互最后,jlink仿真器需要与目标设备进行交互。
它可以向目标设备发送指令和数据,控制目标设备的执行流程;同时,它还可以从目标设备读取寄存器状态、内存数据等信息,以供调试工具进行分析和调试。
3. jlink仿真器的优势和应用优势•高效稳定:jlink仿真器具有高速的数据传输能力和稳定的通信性能,可以实现实时调试和追踪。
•广泛兼容:jlink仿真器支持多种不同架构和系列的芯片,适用于各种嵌入式系统的开发和调试。
•强大功能:jlink仿真器提供了丰富的调试功能,可以满足开发人员的不同需求。
应用•嵌入式系统开发:jlink仿真器是嵌入式系统开发的重要工具,可以帮助开发人员进行硬件调试、固件烧录和性能分析等工作。