MAX4080EVKIT
- 格式:pdf
- 大小:100.56 KB
- 文档页数:5



RVN4126 3.59100-386-9100-386/T DEVICERVN41772-CD2-3.5MCS/MTSRVN41821-CD2-3.5XTS3000/SABER PORTABLE YES RKN4046KHVN9085 3.51-20 R NO HLN9359 PROG. STAND RVN4057 3.532 X 8 CODEPLUG NO3080385B23 & 5880385B30 MDVN4965 3.59100-WS/T CONFIG KITRVN4053 3.5ASTRO DIGITAL INTERFACE NO3080385B23RVN41842-CD RKN4046A (Portable) 2-3.5ASTRO PORTABLE /MOBILE YES3080369B73 or0180300B10 (Mobile) RVN41831-CD3080369B732-3.5ASTRO SPECTRA MOBILE YES(Low / Mid Power)0180300B10 (High Power) RVN4185CD ASTRO SPECTRA PLUS MOBILE NO MANY OPTIONS; SEESERVICE BRIEF#SB-MO-0101RVN4186CD ASTRO SPECTRA PLUS MANY OPTIONS;MOBILE/PORTABLE COMB SEE SERVICE BRIEF#SB-MO-0101RVN4154 3.5ASTROTAC 3000 COMPAR.3080385B23RVN5003 3.5ASTROTAC COMPARATORS NO3080399E31 Adpt.5880385B34RVN4083 3.5BSC II NO FKN5836ARVN4171 3.5C200RVN4029 3.5CENTRACOM SERIES II NO VARIOUS-SEE MANUAL6881121E49RVN4112 3.5COMMAND PLUS NORVN4149 3.5COMTEGRA YES3082056X02HVN6053CD CT250, 450, 450LS YES AAPMKN4004RVN4079 3.5DESKTRAC CONVENTIONAL YES3080070N01RVN4093 3.5DESKTRAC TRUNKED YES3080070N01RVN4091 3.5DGT 9000 DESKSET YES0180358A22RVN4114 3.5GLOBAL POSITIONING SYS.NO RKN4021AHVN8177 3.5GM/GR300/GR500/GR400M10/M120/130YES3080070N01RVN4159 3.5GP60 SERIES YES PMLN4074AHVN9128 3.5GP300 & GP350RVN4152 3.5GP350 AVSRVN4150 3.5GTX YES HKN9857 (Portable)3080070N01(Mobile) HVN9025CD HT CDM/MTX/EX SERIES YES AARKN4083/AARKN4081RiblessAARKN4075RIBLESS NON-USA RKN4074RVN4098H 3.5HT1000/JT1000-VISAR YES3080371E46(VISAR CONV)RVN4151 3.5HT1000 AVSRVN4098 3.5HT1000/ VISAR CONV’L.YES RKN4035B (HT1000) HVN9084 3.5i750YES HLN-9102ARVN4156 3.5LCS/LTS 2000YES HKN9857(Portable)3080070N01(Mobile) RVN4087 3.5LORAN C LOC. RECV’R.NO RKN4021ARVN4135 3.5M100/M200,M110,M400,R100 includesHVN9173,9177,9646,9774YES3080070N01RVN4023 3.5MARATRAC YES3080070N01RVN4019 3.5MAXTRAC CONVENTIONAL YES3080070N01RVN4139 3.5MAXTRAC LS YES3080070N01RVN4043 3.5MAXTRAC TRK DUPLEX YES3080070N01RVN4178CD MC SERIES, MC2000/2500DDN6124AW/DB25 CONNECTORDDN6367AW/DB9 CONNECTOR RVN41751-CD Rib to MIC connector 1-3.5MCS2000 RKN4062BRVN41131-3.5MCS2000RVN4011 3.5MCX1000YES3000056M01RVN4063 3.5MCX1000 MARINE YES3000056M01RVN4117 3.5MDC/RDLAP DEVICESRVN4105 3.5MOBILE PROG. TOOLRVN4119 3.5MOBITEX DEVICESRVN4128 3.5MPT1327-1200 SERIES YES SEE MANUALRVN4025 3.5MSF5000/PURC/ANALOG YES0180355A30RVN4077 3.5MSF5000/10000FLD YES0180355A30RVN4017K 3.5MT 1000YES RTK4205CRVN4148 3.5MTR 2000YES3082056X02RVN4140 3.5MTRI 2000NORVN41761-CD MTS2000, MT2000*, MTX8000, MTX90001-3.5*programmed by DOS which is included in the RVN4176RVN4131 3.5MTVA CODE PLUG FIXRVN4142 3.5MTVA DOCTOR YES3080070N01RVN4131 3.5MTVA3.EXERVN4013 3.5MTX800 & MTX800S YES RTK4205CRVN4097 1-CD MTX8000/MTX9000,MTS2000,MT2000*,* programmed by DOS which is included in the RVN4176HVN9067CD MTX850/MTX8250MTX950,MTX925RVN4138 3.5MTX-LS YES RKN4035DRVN4035 3.5MX 1000YES RTK4203CRVN4073 3.5MX 800YES RKN4006BHVN9395 P100, P200 LB, P50+, P210, P500, PR3000RVN4134 3.5P100 (HVN9175)P200 LB (HVN9794)P50+ (HVN9395)P210 (HVN9763)P500 (HVN9941)PR3000 (HVN9586)YES RTK4205HVN9852 3.5P110YES HKN9755A/REX1143 HVN9262 3.5P200 UHF/VHF YES RTK4205RVN4129 3.5PDT220YVN4051 3.5PORTABLE REPEATER Portable rptr.P1820/P1821AXRVN4061C 3.5PP 1000/500NO3080385B23 & 5880385B30 RVN5002 3.5QUANTAR/QUANTRO NO3O80369E31RVN4135 3.5R100 (HVN9177)M100/M200/M110/M400YES0180358A52RVN4146 3.5RPM500/660RVN4002 3.5SABER YES RTK4203CRVN4131 3.5SETTLET.EXEHVN9007 3.5SM50 & SM120YESRVN4039 3.5SMART STATUS YES FKN5825AHVN9054 3.5SOFTWARE R03.2 P1225YES3080070N01HVN9001 3.5SOFTWARE R05.00.00 1225LS YES HLN9359AHVN9012 3.5SP50RVN4001N 3.5SPECTRA YES3080369B73 (STANDARD)0180300B10 (HIGH POWER) RVN4099 3.5SPECTRA RAILROAD YES3080369B73RVN4110 3.5STATION ACCESS MODULE NO3080369E31RVN4089A 3.5STX TRANSIT YES0180357A54RVN4051 3.5SYSTEMS SABER YES RTK4203BRVN4075 3.5T5600/T5620 SERIES NO3080385B23HVN9060CD TC3000, TS3000, TR3000RVN4123 3.5VISAR PRIVACY PLUS YES3080371E46FVN4333 3.5VRM 100 TOOLBOX FKN4486A CABLE &ADAPTORRVN4133 3.5VRM 500/600/650/850NORVN4181CD XTS 2500/5000 PORTABLES RKN4105A/RKN4106A RVN41002- 3.5XTS3000 ASTRO PORTABLE/MOBILERVN4170 3.5XTS3500YES RKN4035DRIB SET UPRLN4008E RADIO INTERFACE BOX (RIB)0180357A57RIB AC POWER PACK 120V0180358A56RIB AC POWER PACK 220V3080369B71IBM TO RIB CABLE (25 PIN) (USE WITH XT & PS2)3080369B72IBM TO RIB CABLE (9 PIN)RLN443825 PIN (F) TO 9 PIN (M) ADAPTOR (USE W/3080369B72 FOR AT APPLICATION) 5880385B308 PIN MODULAR TO 25 PIN ”D” ADAPTOR (FOR T5600 ONLY)0180359A29DUPLEX ADAPTOR (MOSTAR/TRAXAR TRNK’D ONLY)Item Disk Radio RIB Cable Number Size Product Required Number Item Disk Radio RIB Cable Number Size Product Required NumberUtilizing your personal computer, Radio Service Software (RSS)/Customer Programming Software (CPS)/CustomerConfiguration Software (CCS) enables you to add or reprogram features/parameters as your requirements change. RSS/CPS/CCS is compatible with IBM XT, AT, PS/2 models 30, 50, 60 and 80.Requires 640K RAM. DOS 3.1 or later. Consult the RSS users guide for the computer configuration and DOS requirements. (ForHT1000, MT/MTS2000, MTX838/8000/9000, Visar and some newer products —IBM model 386, 4 MEG RAM and DOS 5.0 or higher are recommended.) A Radio Interface Box (RIB) may be required as well as the appropriate cables. The RIB and cables must be ordered separately.Licensing:A license is required before a software (RVN) order is placed. The software license is site specific (customer number and ultimate destination tag). All sites/locations must purchase their own software.Be sure to place subsequent orders using the original customer number and ship-to-tag or other licensed sites; ordering software without a licensed customer number and ultimate tag may result in unnecessary delays. To obtain a no charge license agreement kit, order RPX4719. To place an order in the U.S. call 1-800-422-4210. Outside the U.S., FAX 847-576-3023.Subscription Program:The purchase of Radio ServiceSoftware/Customer Programming/Customer ConfigurationSoftware (RVN & HVN kits) entitles the buyer/subscriber to three years of free upgrades. At the end of these three years, the sub-scriber must purchase the same Radio Service Software kit to receive an additional three years of free upgrades. If the sub-scriber does not elect to purchase the same Radio Service Software kit, no upgrades will be sent. Annually a subscription status report is mailed to inform subscribers of the RSS/CPS/CCS items on our database and their expiration dates.Notes:1)A subscription service is offered on “RVN”-Radio Service Software/Customer Programming/Customer Configuration Software kits only.2)“RVN” software must only be procured through Radio Products and Services Division (RPSD). Software not procured through the RPSD will not be recorded on the subscription database; upgrades will not be mailed.3)Upgrades are mailed to the original buyer (customer number & ultimate tag).4)SP software is available through the radio product groups.The Motorola General Radio Service Software Agreement is now available on Motorola Online. If you need assistance please feel free to submit a “Contact Us” or call 800-422-4210.SMART RIB SET UPRLN1015D SMART RIB0180302E27 AC POWER PACK 120V 2580373E86 AC POWER PACK 220V3080390B49SMARTRIB CABLE (9 PIN (F) TO 9 PIN (M) (USE WITH AT)3080390B48SMARTRIB CABLE (25 PIN (F) TO 9 PIN (M) (USE WITH XT)RLN4488ASMART RIB BATTERY PACKWIRELESS DATA GROUP PRODUTS SOFTWARERVN4126 3.59100-386/9100T DEVICES MDVN4965 3.59100-WS/T CONFIG’TN RVN41173.5MDC/RDLAP DEVICESPAGING PRODUCTS MANUALS6881011B54 3.5ADVISOR6881029B90 3.5ADVISOR ELITE 6881023B20 3.5ADVISOR GOLD 6881020B35 3.5ADVISOR PRO FLX 6881032B30 3.5BR8506881032B30 3.5LS3506881032B30 3.5LS5506881032B30 3.5LS7506881033B10 3.5LS9506881035B20 3.5MINITOR III8262947A15 3.5PAGEWRITER 20008262947A15 3.5PAGEWRITER 2000X 6881028B10 3.5TALKABOUT T3406881029B35 3.5TIMEPORT P7308262947A15 3.5TIMEPORT P930NLN3548BUNIVERSAL INTERFACE KITItem Disk Radio NumberSize Product。

max4080工作原理Max4080是一款常见的音频功率放大器芯片,它具有许多优秀的特性和工作原理。
本文将详细介绍Max4080的工作原理及其在音频应用中的作用。
一、Max4080的概述Max4080是一款高性能音频功率放大器,采用了先进的BTL(桥式输出)结构和多种保护功能。
它能够提供高达20W的输出功率,并具有低失真、低噪声和高效率等优点。
Max4080广泛应用于家庭音响、汽车音响和专业音频设备等领域。
二、Max4080的工作原理Max4080的工作原理主要包括输入信号处理、功率放大和保护功能三个方面。
1. 输入信号处理Max4080接收来自音频源的输入信号,经过输入级进行放大和滤波处理。
输入级主要包括差动放大器和输入滤波器。
差动放大器能够抑制共模干扰,并提高信号的动态范围。
输入滤波器则用于滤除高频噪声和杂散信号,以保证输入信号的纯净性。
2. 功率放大经过输入信号处理的信号进入功率放大器阶段。
Max4080采用了BTL结构,即桥式输出,能够提供更大的输出功率。
BTL结构由两个输出级组成,每个输出级都由一个功率管和一个反相器组成。
其中一个输出级负责输出正半周信号,另一个输出级负责输出负半周信号。
通过两个输出级的合作,Max4080能够提供较高的功率输出,并保证输出信号的正负半周对称。
3. 保护功能Max4080还具有多种保护功能,以保证其工作的可靠性和安全性。
其中包括过热保护、短路保护和过载保护等。
过热保护功能能够在芯片温度过高时自动降低功率输出或关断输出,以防止芯片受损。
短路保护功能能够在输出短路时及时切断输出,以保护功率管和音箱不受损害。
过载保护功能能够在输出功率超过额定值时自动降低输出,以保护芯片和音箱不受过载的影响。
三、Max4080在音频应用中的作用Max4080作为一款高性能音频功率放大器,在音频应用中发挥着重要的作用。
1. 提供高质量的音频输出Max4080具有低失真和低噪声的特点,能够保证音频信号的高质量输出。

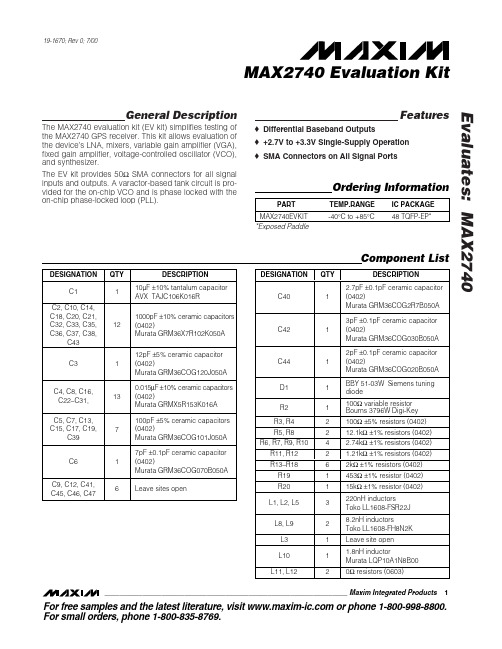
General DescriptionThe MAX16809 evaluation kit (EV kit) is a 16-channel,constant-current LED driver, capable of driving 40mA each to 16 LED strings with a total forward voltage of up to 32V. The MAX16809 EV kit is based on the MAX16809 device, which has 16 constant-current-sink-ing outputs with sink current settable using a single resistor and a high-performance, current-mode pulse-width-modulator (PWM) controller, for implementing a DC-DC converter that generates the supply voltage to drive the LED strings.The MAX16809 EV kit operates at supply voltages between 9V to 16V and temperatures ranging from 0°C to +70°C. I t features a PWM dimming control,adaptive control of the LED supply voltage, which depends upon the operating voltage of the LED strings,a built-in clock generator, and a low-current shutdown.The MAX16809 EV kit is a fully assembled and tested board.Features♦9V to 16V Supply Voltage Range♦40mA LED Current (Per Each LED String)♦Single-Resistor Current Adjust for 16 Channels ♦Up to 32V LED String Voltage♦Boost Converter to Generate LED Supply Voltage ♦Adaptive LED Supply Voltage Control Increases Efficiency ♦PWM Dimming Control♦Output-Voltage-Spike Protection for Inductive-Output Lines ♦Proven PCB LayoutEvaluates: MAX16809MAX16809 Evaluation Kit________________________________________________________________Maxim Integrated Products 119-0821; Rev 0; 5/07For pricing, delivery, and ordering information,please contact Maxim/Dallas Direct!at 1-888-629-4642, or visit Maxim’s website at .Ordering Information*This limited temperature range applies to the EV kit PCB only.The MAX16809 IC temperature range is -40°C to +125°C.†EP = Exposed paddle.E v a l u a t e s : M A X 16809MAX16809 Evaluation Kit 2_______________________________________________________________________________________Evaluates: MAX16809MAX16809 Evaluation Kit_______________________________________________________________________________________3Quick StartRecommended Equipment•One 16V, 5A adjustable power supply •One 5V power supply•16 LED strings with a total forward voltage ≤32V •One multimeter•One PWM signal generator (optional)ProcedureThe MAX16809 EV kit is fully assembled and tested.Follow the steps below to verify operation. Caution: Do not turn on the power supply until all connections are completed.1)Connect LED strings with operating voltage ofapproximately 32V between VLED (pins 1-4 of J1)and OUT0–OUT15 (pins 5-20 of J1). All 16 channels should have an LED string load connected of the same type.2)Connect the DC power supply (16V, 5A) to VIN andGND.3)Connect a DC power supply (0 to 5V) to VBIAS andGND.4)Turn on the power supplies and apply 10V to VI Nand 3V to 5V to VBIAS. Connect SHDN and PWM to 3V to 5V. All of the LEDs should turn on. Measure the current through any LED string, which should be 40mA ±7%.5)I ncrease the supply voltage to 16V and the LEDcurrents will be stable. Measure the current through any LED string, which should be 40mA ±7%.6)Apply a PWM signal with amplitude of 3V to 5V anda frequency between 100Hz and 2kHz to the PWM input. The LED brightness should increase as the PWM duty cycle increases and viceversa.7)Connect SHDN to GND and all LEDs should turn off.Detailed DescriptionThe MAX16809 EV kit is a 16-channel, constant-current LED driver capable of driving 40mA each to 16 LED strings, with a total forward voltage of up to 32V. The MAX16809 EV kit can drive a total of 160 white LEDs in 16 strings, with operating current up to 40mA. The MAX16809 EV kit can operate at input supply voltages between 9V and 16V.The MAX16809 EV kit evaluates the MAX16809 IC, which has two major sections. The first section consists of 16constant-current LED drivers capable of sinking up to 55mA when on and blocking up to 36V when off. The sec-ond section is a high-performance current-mode PWMcontroller that can control a DC-DC converter to generate the supply voltage for driving the LED strings. The MAX16809 EV kit uses the PWM controller to drive a boost converter, which takes a 9V to 16V input and gen-erates a 33V LED supply voltage. To drive a constant cur-rent into an LED string, connect the LED string between the 33V output and any of the 16 constant-current-sink outputs. The resistor (R1) from the SET pin to ground pro-grams the sink current of each output. The sink current of any output can be up to 55mA and the amplitude is the same value for all the outputs. The difference between the total forward voltage and the LED supply voltage drops between the constant-current-sink output and ground,and is dissipated as power in the device.The LED supply voltage generated by the boost con-verter in the MAX16809 EV kit is adaptive. The LED string with the highest total forward voltage dominates the control loop, and the boost-converter voltage is adjusted so that the driver associated with that string receives just enough voltage required for current drive.All the other strings, with lower total forward voltages,will have excess supply voltage, which is then dropped in the associated driver. This feedback mechanism ensures that the linear-current-control circuit dissipates the minimum possible power. An on-board inverter (U4A) is configured to generate the clock input for the MAX16809. The constant-current output-driver circuits and U4 need a 3.3V to 5V input, which should be sup-plied externally. If 5V is not available, it can be generat-ed using an emitter-follower buffer from the REF output of MAX16809.Boost ConverterThe boost converter that generates the 33V LED supply voltage operates at a switching frequency of 350kHz in continuous-conduction mode (CCM). The current-mode PWM controller in the MAX16809 drives the external MOSFET (Q2) to control the boost converter. The MOSFET is turned on at the beginning of every switching cycle and turned off when the current through the induc-tor (L1) reaches the peak value set by the error-amplifier-output voltage. Inductor current is sensed from the volt-age across the ground-referenced current-sense resis-tor (parallel combination of R12 and R13). This current-sense information is passed on to the current-sense comparators in the MAX16809 through the CS pin.During the on period of the MOSFET, the inductor stores energy from the input supply. When the switch is turned off, the inductor generates sufficient voltage in reverse direction to discharge the stored energy to VLED. This generated voltage forms a source, in series with the input supply voltage, and drives VLED through the rectifier diode (D2).E v a l u a t e s : M A X 16809MAX16809 Evaluation Kit4_______________________________________________________________________________________As the boost converter is operated in CCM, only part of the stored energy in the inductor is discharged to VLED.The advantages of CCM include reduced input and out-put filtering, reduced EMI due to lower peak currents,and higher converter efficiency. However, these advan-tages come at the cost of a right-half-plane zero in the converter-transfer function. Compensating this zero requires reducing the system bandwidth, which affects the converter-dynamic response. As the 16-channel,constant-current-sink outputs control the current through the LEDs, slower control of VLED does not affect the LED operation. Compensation of the feedback circuit is explained in the Feedback Compensation section.An internal comparator turns off the gate pulse to the external MOSFET if the voltage at the CS pin exceeds 0.3V. The current through the inductor that produces 0.3V at the CS pin is the maximum inductor current possible (the actual current can be a little higher than this limit due to the 60ns propagation delay from the CS pin to the MOSFET drive output). This condition can happen when the feedback loop is broken, when the output capacitor charges during power-up, or when there is an overload at the output. This feature protects the MOSFET by limiting the maximum current passing through it during such conditions.The RC filter, consisting of R9 and C10, removes the voltage spike across the current-sense resistors pro-duced by the turn-on gate current of the MOSFET and the reverse-recovery current of D2. Without filtering,these current spikes can cause sense comparators to falsely trigger and turn off the gate pulse prematurely.The filter time constant should not be higher than required (the MAX16809 EV kit uses a 120ns time con-stant), as a higher time constant adds additional delay to the current-sense voltage, effectively increasing the current limit.During normal operating conditions, the feedback loop controls the peak current. The error amplifier compares a scaled-down version of the LED supply voltage (VLED) with a highly accurate 2.5V reference. The error amplifier and compensation network then amplify the error signal, and the current comparator compares this signal to the sensed-current voltage to create a PWM drive output.Power-Circuit DesignI nitially, decide the input supply voltage range, output voltage VLED (the sum of the maximum LED total for-ward voltage and 1V bias voltage for the constant-cur-rent-sink output), and the output current I OUT (the sum of all the LED string currents).Calculate maximum duty cycle D MAX using the following equation:where V D is the forward drop of the rectifier diode D2(~0.6V), VIN MIN is the minimum input supply voltage (in this case, 9V), and V FET is the average drain-to-source voltage of the MOSFET Q2 when it is on.Select the switching frequency F SW based on the space, noise, dynamic response, and efficiency con-straints. Select the maximum peak-to-peak ripple on the inductor current I L PP . For the MAX16809 EV kit,F SW is 350kHz and IL PP is ±30% of the average induc-tor current. Use the following equations to calculate the maximum average-inductor current I L AVG and peak inductor current IL PEAK :Since I L PP is ±30% of the average-inductor current ILAVG :Calculate the minimum inductance value L MIN with the inductor current ripple set to the maximum value:Choose an inductor that has a minimum inductance greater than this calculated value.Calculate the current-sense resistor (R12 in parallel with R13) using the equation below:where 0.3V is the maximum current-sense signal volt-age. The factor 0.75 is for compensating the reduction of maximum current-sense voltage due to the additionof slope compensation. Check this factor and adjust after the slope compensation is calculated. See the Slope Compensation section for more information.IL IL PP AVG =××032.Evaluates: MAX16809MAX16809 Evaluation Kit_______________________________________________________________________________________5The saturation current limit of the selected inductor (IL SAT ) should be greater than the value given by the equation below. Selecting an inductor with 10% higher IL SAT rating is a good choice:Calculate the output capacitor C OUT (parallel combina-tion of C16, C17, C18, and C24) using the followingequation:where VLED PP is the peak-to-peak ripple in the LED supply voltage. The value of the calculated output capacitance will be much lower than what is actually necessary for feedback loop compensation. See the Feedback Compensation section to calculate the out-put capacitance based on the compensation require-ments.Calculate the input capacitor C IN (parallel combination of C12, C13, C14, and C5) using the following equation:where VI N PP is the peak-to-peak input ripple voltage.This equation assumes that input capacitors supply most of the input ripple current.Selection of Power SemiconductorsThe switching MOSFET (Q2) should have a voltage rat-ing sufficient to withstand the maximum output voltage,together with the diode drop of D2, and any possible overshoot due to ringing caused by parasitic induc-tances and capacitances. Use a MOSFET with voltage rating higher than that calculated by the following equation:The factor of 1.3 provides a 30% safety margin.The continuous drain-current rating of the selected MOSFET when the case temperature is at +70°C should be greater than that calculated by the following equation.The MOSFET must be mounted on a board, as per manufacturer specifications, to dissipate the heat:The MOSFET dissipates power due to both switchinglosses, as well as conduction losses. Use the following equation to calculate the conduction losses in the MOSFET:where RDS ON is the on-state drain-source resistance of the MOSFET with an assumed junction temperature of 100°C.Use the following equation to calculate the switching losses in the MOSFET:where I GON and I GOFF are the gate currents of the MOSFET (with V GS equal to the threshold voltage)when it is turned on and turned off, respectively, and C GD is the gate-to-drain MOSFET capacitance. Choose a MOSFET that has a higher power rating than that cal-culated by the following equation when the MOSFET case temperature is at +70°C:The MAX16809 EV kit uses a Schottky diode as the boost-converter rectifier (D2). A Schottky rectifier diode produces less forward drop and puts the least burden on the MOSFET during reverse recovery. If a diode with considerable reverse-recovery time is used, it should be considered in the MOSFET switching-loss calculation.The Schottky diode selected should have a voltage rat-ing 20% above the maximum boost-converter output voltage. The current rating of the diode should be greater than I Din the following equation:P P P TOT COND SW=+V VLED V DS D =+()×13.IL IL SAT PEAK=×11.E v a l u a t e s : M A X 16809MAX16809 Evaluation Kit 6_______________________________________________________________________________________Slope CompensationWhen the boost converter operates in CCM with more than 50% duty cycle, subharmonic oscillations occur if slope compensation is not implemented. Subharmonic oscillations do not allow the PWM duty cycle to settle to a peak current value set by the voltage-feedback loop.The duty cycle oscillates back and forth about the required value, usually at half the switching frequency.Subharmonic oscillations die out if a sufficient negative slope is added to the inductor peak current. This means that for any peak current set by the feedback loop, the output pulse terminates sooner than normally expected. The minimum slope compensation that should be added to stabilize the current loop is half of the worst-case (max) falling slope of inductor current.Adding a ramp to the current-sense signal, with posi-tive slope in sync with the switching frequency, can produce the desired function. The greater the duty cycle, the greater the added voltage, and the greater the difference between the set current and the actual inductor current. In the MAX16809 EV kit, the oscillator ramp signal is buffered using Q1 and added to the cur-rent-sense signal with proper scaling to implement the slope compensation. Follow the steps below to calcu-late the component values for slope compensation.Calculate the worst-case falling slope of the inductor current using the following equation:From the inductor current falling slope, find its equiva-lent voltage slope across the current-sense resistor R CS (R12 parallel with R13) using the following equation:The minimum voltage slope that should be added to the current-sense waveform is half of V SLOPE for ensur-ing stability up to 100% duty cycle. As the maximum continuous duty cycle used is less than 100%, the mini-mum required compensation slope becomes:The factor 1.1 provides a 10% margin. Resistors R9and R10 determine the attenuation of the buffered volt-age slope from the emitter of Q1. The forward drop ofsignal diode D11, together with the V BE of Q1, almost cancel the 1.1V offset of the ramp waveform. Calculate the approximate slope of the oscillator ramp using the following equation:where 1.7V is the ramp amplitude and F SW is the switching frequency.Select the value of R9 such that the input bias current of the current-sense comparators does not add consider-able error to the current-sense signal. The value of R10for the slope compensation is given by the equation:LED DriverThe MAX16809 features a 16-channel, constant-current LED driver, with each channel capable of sinking up to 55mA of LED current. The LED strings are connected between VLED and the constant-current-sink outputs to drive regulated current through LED strings. The cur-rent through all 16 channels is controlled through resis-tor (R1) from the SET pin to ground. The MAX16809 EV kit sets the current through each string at 40mA and the maximum LED supply voltage to 33V. The MAX16809EV kit drives LED strings with a total forward voltage of up to 32V.A 4-wire serial interface with four inputs (DIN, CLK, LE,and OE ) individually control the constant-current out-puts. I n the MAX16809 EV kit, a 50kHz clock signal,generated by U4A, clocks 16 1s into the internal shift register by tying DIN and LE to 5V. The clock-generation circuit can be avoided if a microcontroller provides the function.The output enable (OE ) can provide PWM dimming. An inverted PWM signal, generated by the inverter U4B, is necessary to drive the OE pin. When the PWM signal is low (LED drivers off), it also influences the feedback with the network formed by R6 and D12. See the Adaptive LED Supply Voltage Control section for more details.I f an inverted PWM signal is available, use the circuit shown in Figure1 to drive the OE input and feedbacknetwork.VR F SLOPE SW=×17.V IL R SLOPE SLOPE CS=×Evaluates: MAX16809MAX16809 Evaluation Kit_______________________________________________________________________________________7Output Current SettingThe amplitude of the output sink currents for all 16channels is set to the same value by the resistor (R1)from the SET pin to ground. The minimum allowed value of R SET is 311Ω, which sets the output currents to 55mA. The maximum allowed value of R SET is 5k Ω. The MAX16809 EV kit uses 430Ωfor R SET , which sets the output current to 40mA. To set a different output cur-rent, use the following equation:where R SET is the current-setting resistor (R1) value in ohms and I OUT is the desired output current in milliamps.Adaptive LED Supply Voltage ControlTo reduce power dissipation in the I C, the MAX16809EV kit features adaptive control of VLED based on the operating voltage of the LED strings. The constant-cur-rent-sink outputs can sink stable currents with output voltages as low as 0.8V. The voltage at each of the 16outputs will be the difference between VLED and the total forward voltage of the LED string connected to that output. The MAX16809 EV kit implements a feed-back mechanism to sense the voltage at each of the 16constant-current-sink outputs. Using dual zener diodes (D3–D10), the MAX16809 EV kit selects the lowest dri-ver voltage (with the greatest LED string voltage) to regulate. The boost-converter PWM then adjusts so that VLED is high enough for this sink output to settle toapproximately 0.8V. All the other strings have sufficient voltage, as their total forward voltages are lower. The feedback mechanism ensures that the IC dissipates the minimum possible power. For adaptive control to func-tion efficiently connect LED strings to all 16 channels and use an equal number of LEDs from the same bin in each string. I f some of the 16 channels are not used,then the zener diodes (D3–D10) should be removed from the unused channels.Use the equation below to calculate the value of R2 to get the required minimum voltage at the sink outputs:where 2.5V is the feedback reference, V DZ is the for-ward drop of the ORing diode (D3–D10), V S = 0.5V is the required sink-output voltage, and V FLED is the nom-inal total forward voltage of the LED strings. Select the value of R2 such that R7 is approximately 10k Ω.The zener diodes (D3–D10) also provide output over-voltage protection. If an LED string gets partially or fully shorted, making the sink-output voltage go high, the 15V zener diode connected to that output conducts in reverse direction, and limits the VLED voltage. Under this condition, the other LED strings might not turn on.When the outputs are off, the LED drivers are at high impedance and the feedback network now combines R6 and D12 to provide a path for the feedback currentand to control VLED. Use the following equation toE v a l u a t e s : M A X 16809MAX16809 Evaluation Kit 8_______________________________________________________________________________________calculate the value of R6 to get the required LED sup-ply voltage during PWM off time:where 2.5V is the feedback-reference voltage, 0.4V is the total voltage dropped by D4 and PWM input, and VLED OFF is the desired LED supply voltage during PWM off time. VLED OFF should be set to the worst-case LED string voltage plus some additional headroom for the LED drivers (0.8V), as well as a reserve voltage (approximately 1V). The reserve voltage allows the MAX16809 to provide current for very short PWM dim-ming on-pulses. With pulses as low as 2µs, the VLED control loop is not able to react, and the output capaci-tors provide all the current. For longer PWM dimming pulses, the control loop reacts and the supply operates at the adaptive voltage level.During an open LED condition, the 33V zener diode (D1) limits the maximum LED supply voltage to 35.5V. If VLED attempts to increase beyond this level, D1 con-ducts in reverse direction and pulls the FB pin high,which causes the boost regulator to cut back on the PWM signal and reduce the output voltage.PWM DimmingThe PWM dimming controls the LED brightness by adjusting the duty cycle of the PWM input signal. A high voltage at the PWM input enables the output cur-rent; a low voltage turns off the output current. Connect a signal with peak amplitude of 3V to 5V and with fre-quency from 100Hz to 2kHz to the PWM input and vary the duty cycle to adjust the LED brightness. The LED brightness increases when the duty cycle increases and vice versa. If an inverted PWM signal is available,use that signal to implement PWM dimming, as shown in Figure 1.Feedback CompensationLike any other circuit with feedback, the boost convert-er that generates the supply voltage for the LED strings needs to be compensated for stable control of its out-put voltage. As the boost converter is operated in con-tinuous-conduction mode, there exists a right-half-plane (RHP) zero in the power-circuit transfer function.This zero adds a 20dB/decade gain together with a 90-degree phase lag, which is difficult to compensate. The easiest way to avoid this zero is to roll off the loop gainto 0dB at a frequency less than half of the RHP zero fre-quency with a -20dB/decade slope. For a boost con-verter, the worst-case RHP zero frequency (F ZRHP ) is given by the following equation:where D MAX is the maximum duty cycle, L is the induc-tance of the inductor, and I O is the output current,which is the sum of all the LED string currents.The boost converter used in the MAX16809 EV kit is operated with current-mode control. There are two feedback loops within a current-mode-controlled con-verter: an inner loop that controls the inductor current and an outer loop that controls the output voltage. The amplified voltage error produced by the outer voltage loop is the input to the inner current loop that controls the peak inductor current.The internal current loop converts the double-pole 2nd-order system, formed by the inductor and the output capacitor C OUT , to a 1st-order system having a single pole consisting of the output filter capacitor and the out-put load. As the output load is a constant current (i.e.,very high Thevenin impedance), this pole is located near the origin (0Hz). The phase lag created by the output pole for any frequency will be 90 degrees. Since the power-circuit DC gain is limited by other factors, the gain starts falling at -20dB/decade from a non-zero frequency before which the power-circuit gain stabilizes.Total gain of the feedback loop at DC is given by the following equation:where G P is the power-circuit DC gain, and G EA is the error-amplifier open-loop DC gain, typically 100dB. G FB is the gain of the feedback network for adaptive control of the VLED, which is seen from VLED to the error-amplifier input (FB pin). The adaptive control senses the voltages at the 16 constant-current-sink outputs and adjusts the feedback to control these voltages to a minimum value (Figure 2). As the LEDs carry constant current, the voltage across the LEDs does not change with variations in VLED. Any change in VLED directly reflects to the constant-current-sink outputs and to the error-amplifier input, making G FB equal to unity.G G G G TOT P EA FB=××Evaluates: MAX16809MAX16809 Evaluation Kit_______________________________________________________________________________________9The DC gain of the power circuit is expressed as the change in the output voltage, with respect to the change in error-amplifier output voltage. As the boost converter in the MAX16809 EV kit drives a constant-current load, the power-circuit DC gain is calculatedCalculate the power-circuit DC gain using the following where R CS is the current-sense resistor, F SW is theswitching frequency, and the factor 3 is to account for the attenuation of error-amp output before it is fed to the current-sense comparator.The power-circuit gain is lowest at the minimum input supply voltage and highest at the maximum input sup-ply voltage. Any input supply voltage between 9V and 16V can be used for power-circuit gain calculation, as the final compensation values obtained are the same.Calculate the frequency F P2,at which the power-circuit gain starts falling,at -20dB/decade using the following equation:where C OUT is the output filter capacitor, which is the parallel combination of C16, C17, C18, and C24. Adjust the output capacitance so that the product of F P2and G P is below F ZRHP / 6. The value of output capacitance obtained this way will be much greater than the value obtained using the maximum output voltage ripple specification.The compensation strategy is as follows. The gain-fre-quency response of the feedback loop should cross 0dB at or below half of the RHP zero frequency, with a slope of -20dB/decade for the feedback to be stable and have sufficient phase margin. The compensation network from COMP pin to FB pin of the MAX16809 (formed by R5,C28, C29, and R11) offers one dominant pole (P1), a zero (Z1), and a high-frequency pole (P3). There are two very low frequency poles and a zero in the loop before the crossover frequency. The function of the zero (Z1) is to compensate for the output pole and to reduce the slope of the loop gain from -40dB/decade to -20dB/decade,and also to reduce the phase lag by 90 degrees.Choose the crossover frequency to be half of the worst-case RHP zero frequency:Place the zero (Z1) at one-third of the crossover fre-quency, so that the phase margin starts improving from a sufficiently lower frequency:Use the following equation to calculate the dominant pole location, so that the loop gain crosses 0dB at F C :Since the open-loop gain of the error amplifier can have variations, the dominant pole location can also vary from device to device. I n the MAX16809 EV kit, the dominant pole location is decided by the error-amplifier gain, so the combined effect is a constant-gain-band-width product.Select the value of R11 such that the input bias current of the error amplifier does not cause considerable drop across it. The effective AC impedance seen from the FB pin is the sum of R11 and R7. I t is preferable to keep R7 much lower, compared to R11, to have better control on the AC impedance. Find C29 using the fol-lowing equation:The location of the zero (Z1) decided by R5 and C29 is given by the following equation:Place the high-frequency pole (P 3), formed by C28,C29, and R5, at half the switching frequency to provide further attenuation to any high-frequency signal propa-gating through the system. The location of the high-fre-quency pole (F P3) is given by the following equation,and should be used to calculate the value of C28:。
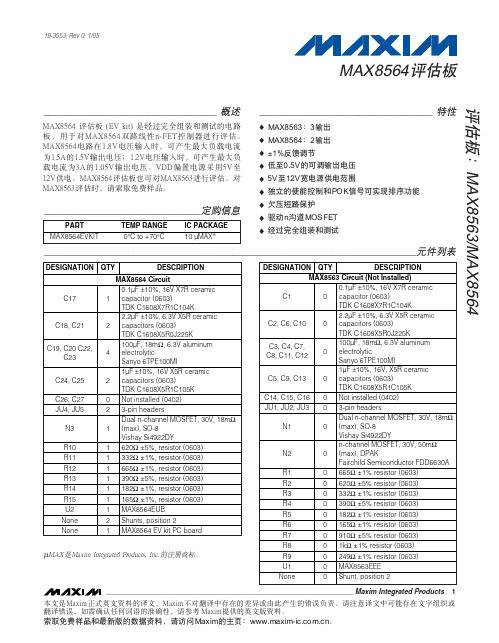
_________________________________概述MAX8564 评估板(EV kit) 是经过完全组装和测试的电路板,用于对MAX8564双路线性n-FET控制器进行评估。
MAX8564电路在1.8V电压输入时,可产生最大负载电流为1.5A的1.5V输出电压;1.2V电压输入时,可产生最大负载电流为3A的1.05V输出电压。
VDD偏置电源采用5V至12V供电。
MAX8564评估板也可对MAX8563进行评估。
对MAX8563评估时,请索取免费样品。
_________________________________特性♦MAX8563:3输出♦MAX8564:2输出♦±1%反馈调节♦低至0.5V的可调输出电压♦5V至12V宽电源供电范围♦独立的使能控制和POK信号可实现排序功能♦欠压短路保护♦驱动n沟道MOSFET ♦经过完全组装和测试评估板:MAX8563/MAX8564MAX8564评估板______________________________定购信息19-3553; Rev 0; 1/05µMAX是Maxim Integrated Products, Inc.的注册商标。
本文是Maxim正式英文资料的译文,Maxim不对翻译中存在的差异或由此产生的错误负责。
请注意译文中可能存在文字组织或翻译错误,如需确认任何词语的准确性,请参考Maxim提供的英文版资料。
索取免费样品和最新版的数据资料,请访问Maxim的主页:。
评估板:M A X 8563/M A X 8564______________________________快速入门推荐设备•两个2V、4A可调节直流电源•一个5V或12V、100mA直流电源•两个数字万用表(DMM)• 1.5A负载•3A负载•电流表(可选)步骤MAX8564评估板经过完全安装与测试。
按照以下步骤验证电路板的工作情况:1)将可调节直流电源电压预置在1.8V (以后称作PS1)。

Evaluates: MAX4080/MAX4081MAX4080 Evaluation Kit________________________________________________________________Maxim Integrated Products 1For pricing, delivery, and ordering information, please contact Maxim Direct at 1-888-629-4642,or visit Maxim’s website at .19-3102; Rev 0; 12/07General DescriptionThe MAX4080 evaluation kit (EV kit) is a fully assembled and tested surface-mount printed-circuit board (PCB)that contains a MAX4080SAUA (8-pin µMAX ®) IC. The MAX4080 is a high-side, current-sense amplifier with an input common-mode voltage range that extends from 4.5V to 76V. The current-sense amplifier provides an analog voltage output proportional to the load current flowing through an external sense resistor.The EV kit can also be used to evaluate the MAX4081,which is a bidirectional version of the current-sense amplifier. The MAX4081’s single output pin continuously monitors the transition from charge to discharge and avoids the need for a separate polarity output pin. The MAX4081 requires an external reference to set the zero-current output level (V SENSE = 0V). Charging current is represented by an output voltage from V REF to V CC ,while discharge current is given from V REF to GND.All gain versions of the MAX4080 and MAX4081 are footprint-compatible and the MAX4080SAUA can easily be replaced by a MAX4080F AUA, MAX4080TAUA,MAX4081F AUA, MAX4081TAUA, or MAX4081SAUA.With a combination of three gain versions (5V/V, 20V/V,60V/V = F , T, S suffix) and a user-selectable, external sense resistor, the user can easily match the full-scale load current to the required output-voltage range.F or maximum versatility, these parts can operate with 76V input common-mode voltage at RS+ and RS- pins,independent of operating supply voltage (V CC ) used.These parts also allow a large differential voltage between RS+ and RS- pins for high reliability. High-side current monitoring does not interfere with the ground path of the load being measured, making the MAX4080/MAX4081 particularly useful in a wide range of high-voltage systems.Features♦Real-Time Current Monitoring♦Wide 4.5V to 76V Input Common-Mode Range Independent of Operating Supply Voltage ♦Bidirectional or Unidirectional I SENSE ♦±0.1% Full-Scale Accuracy ♦8-Pin µMAX Package ♦Fully Assembled and TestedOrdering InformationµMAX is a registered trademark of Maxim Integrated Products,Inc.E v a l u a t e s : M A X 4080/M A X 4081MAX4080 Evaluation Kit 2_______________________________________________________________________________________Quick StartRecommended EquipmentBefore beginning, the following equipment is needed:•One 12V, 1A power supply•One electronic load capable of sinking 1A •Two digital voltmeters (DVMs)ProcedureThe MAX4080 EV kit is fully assembled and tested.F ollow the steps below to verify board operation.Caution: Do not turn on the power supply or the electronic load until all connections are completed.1)MAX4081 only: Verify that a shunt is installed acrosspins 1-2 of jumper JU1.2)MAX4081 only: Verify that a shunt is installed acrosspins 1-2 of jumper JU2.3)Set the power supply to 12V and connect the posi-tive terminal to the VCC pad. Connect the ground of the power supply to the GND pad closest to the VCC pad.4)Connect the VCC pad and the VSENSE+ pad.5)Set the electronic load to sink 1A.6)Connect the electronic load’s positive terminal tothe VSENSE- pad. Connect the load’s ground to the GND pad closest to the VCC pad.7)Connect a voltmeter across the VSENSE+ andVSENSE- pads. (Note that this voltmeter measure-ment will not accurately reflect actual sense voltage across the sense resistor due to voltage drop in the trace and in the connectors. Accurate measurement of sense voltage across low-value sense resistors requires the use of 4-wire Kelvin-connected sense resistors. The EV kit board shows one example of good layout practice by which RS+ and RS- of the current-sense amplifier can connect to commonly available 2-wire sense resistors.)8)Connect the second voltmeter across the VOUTpad and the closest GND pad.9)Turn on the power supply.10)Turn on the electronic load.11)Verify that the first DVM reading is approximately100mV and the second DVM is approximately 6V.12)Adjust the electronic load current to between 1Aand 0A and verify that the reading of the second DVM is about 60 times the reading of the first DVM.Detailed DescriptionThe MAX4080 EV kit is a current-sense amplifier that measures the load current and provides an analog volt-age output. The full-scale V SENSE is set to 100mV. The full-scale I SENSE is set at 1A. They can be changed by replacing current-sense resistor R1 to another appropri-ate value.Applying the V CC Power Supply and theLoad Power SupplyThe EV kit is installed with a MAX4080SAUA, which has a gain of 60. The current-sense-resistor value is 0.1Ω.The V OUT is given by:where V SENSE is the sense voltage, I SENSE is the load current, and A V is the gain of the device.Note:Output voltage is internally clamped not to exceed 18V.Normal operating V CC , V SENSE+, and V SENSE-range is 4.5V to 76V.Measuring the Load CurrentThe load current is measured as a voltage drop (V SENSE ) across an external sense resistor. This volt-age is then amplified by the current-sense amplifier and presented at its OUT pin. Like all differential amplifiers,the output voltage has two components of error (an off-set error and a gain error). The offset error affects accu-racy of measurement at low currents and a gain error affects output accuracy at large currents—both errors affect accuracy of measurement at intermediate cur-rents. By minimizing both offset and gain errors, accu-rate measurements can be obtained from the MAX4080/MAX4081 over a wide dynamic range.V V A I OUT SENSE V SENSE =×=××0160.Component Supplierswhen contacting these component suppliers.The MAX4080 EV kit, which is assembled with the MAX4080SAUA, is designed with a full-scale sense voltage drop of 100mV. For a typical 1A full-scale load current, this results in the use of a 0.1Ωsense resistor on the MAX4080 EV kit using the following equation: For different full-scale sense voltage and full-scale load-current arrangements, the equation above can be used to determine the appropriate current-sense-resistor val-ues. Refer to Table 1. Typical Component Values in the MAX4080/MAX4081 IC data sheet for further guidance.Evaluating theMAX4080FAUA/MAX4080TAUA The MAX4080 EV kit can be used to evaluate other gain versions of the MAX4080 (5V/V, 20V/V, 60V/V = F, T, S suffix). Replace U1 with a different version of the MAX4080 and refer to Table 1. Typical Component Values in the MAX4080/MAX4081 IC data sheet for additional information.Evaluating the MAX4081 BidirectionalCurrent-Sense Amplifiers The MAX4080 EV kit can also be used to evaluate the MAX4081 bidirectional current-sense amplifiers. Replace U1 with a MAX4081SAUA, MAX4081TAUA, or MAX4081FAUA. The MAX4081 requires an external ref-erence to set the zero-current output level (V SENSE= 0V). The charging current is represented by an output voltage from V REF to V CC, while discharge current is given from V REF to GND. Measuring V OUT with respect to V REF(instead of GND) gives a ±output voltage.The V OUT reference level is controlled by REF1A and REF1B. V REF is defined as the average voltage of VREF1A and VREF1B. Connect REF1A and REF1B together to a low-noise, regulated voltage source to set the output reference level. In this mode, V OUT equals VREF1A when V SENSE equals zero.Alternatively, connect REF1B to ground and REF1A to a low-noise, regulated voltage source. In this case, the output reference level (V REF) is equal to VREF1A divid-ed by two. V OUT equals half of VREF1A when V SENSE equals zero.In either mode, the output swings above the reference voltage for positive current sensing (VRS+ > VRS-). The output swings below the reference voltage for negative current sensing (VRS+ < VRS-).Use jumpers JU1 and JU2 to set the V REF on the EV kit. See Table 1 for jumper settings and the corresponding V REFvalues.Evaluates: MAX4080/MAX4081MAX4080 Evaluation Kit_______________________________________________________________________________________3Figure 1. MAX4080 EV Kit SchematicE v a l u a t e s : M A X 4080/M A X 4081MAX4080 Evaluation Kit 4_______________________________________________________________________________________Component SideMaxim cannot assume responsibility for use of any circuitry other than circuitry entirely embodied in a Maxim product. No circuit patent licenses are implied. Maxim reserves the right to change the circuitry and specifications without notice at any time.Maxim Integrated Products, 120 San Gabriel Drive, Sunnyvale, CA 94086 408-737-7600 _____________________5©2007 Maxim Integrated Productsis a registered trademark of Maxim Integrated Products, Inc.Evaluates: MAX4080/MAX4081MAX4080 Evaluation Kit。
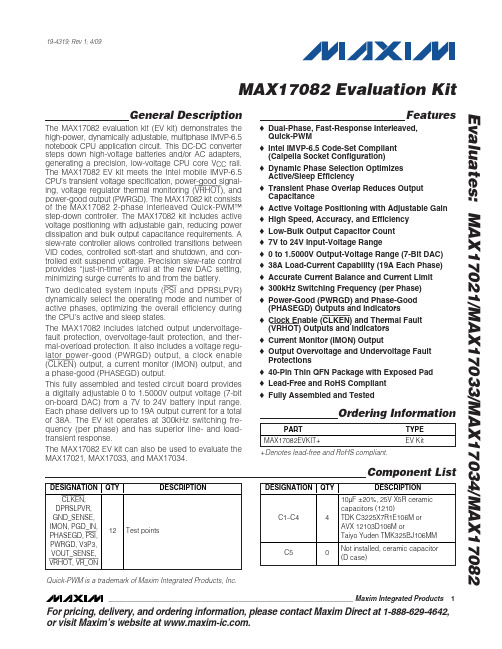
General DescriptionThe MAX17082 evaluation kit (EV kit) demonstrates the high-power, dynamically adjustable, multiphase IMVP-6.5notebook CPU application circuit. This DC-DC converter steps down high-voltage batteries and/or AC adapters,generating a precision, low-voltage CPU core V CC rail.The MAX17082 EV kit meets the Intel mobile IMVP-6.5CPU’s transient voltage specification, power-good signal-ing, voltage regulator thermal monitoring (VRHOT ), and power-good output (PWRGD). The MAX17082 kit consists of the MAX17082 2-phase interleaved Quick-PWM™step-down controller. The MAX17082 kit includes active voltage positioning with adjustable gain, reducing power dissipation and bulk output capacitance requirements. A slew-rate controller allows controlled transitions between VID codes, controlled soft-start and shutdown, and con-trolled exit suspend voltage. Precision slew-rate control provides “just-in-time” arrival at the new DAC setting,minimizing surge currents to and from the battery.Two dedicated system inputs (PSI and DPRSLPVR)dynamically select the operating mode and number of active phases, optimizing the overall efficiency during the CPU’s active and sleep states.The MAX17082 includes latched output undervoltage-fault protection, overvoltage-fault protection, and ther-mal-overload protection. It also includes a voltage regu-lator power-good (PWRGD) output, a clock enable (CLKEN ) output, a current monitor (IMON) output, and a phase-good (PHASEGD) output.This fully assembled and tested circuit board provides a digitally adjustable 0 to 1.5000V output voltage (7-bit on-board DAC) from a 7V to 24V battery input range.Each phase delivers up to 19A output current for a total of 38A. The EV kit operates at 300kHz switching fre-quency (per phase) and has superior line- and load-transient response.The MAX17082 EV kit can also be used to evaluate the MAX17021, MAX17033, and MAX17034.Featureso Dual-Phase, Fast-Response Interleaved,Quick-PWMo Intel IMVP-6.5 Code-Set Compliant (Calpella Socket Configuration)o Dynamic Phase Selection Optimizes Active/Sleep Efficiencyo Transient Phase Overlap Reduces Output Capacitanceo Active Voltage Positioning with Adjustable Gain o High Speed, Accuracy, and Efficiency o Low-Bulk Output Capacitor Count o 7V to 24V Input-Voltage Rangeo 0 to 1.5000V Output-Voltage Range (7-Bit DAC)o 38A Load-Current Capability (19A Each Phase)o Accurate Current Balance and Current Limit o 300kHz Switching Frequency (per Phase)o Power-Good (PWRGD) and Phase-Good (PHASEGD) Outputs and Indicatorso Clock Enable (CLKEN ) and Thermal Fault (VRHOT ) Outputs and Indicators o Current Monitor (IMON) Outputo Output Overvoltage and Undervoltage Fault Protectionso 40-Pin Thin QFN Package with Exposed Pad o Lead-Free and RoHS Compliant o Fully Assembled and TestedEvaluates: MAX17021/MAX17033/MAX17034/MAX17082MAX17082 Evaluation Kit________________________________________________________________Maxim Integrated Products119-4319; Rev 1; 4/09Component ListOrdering Information+Denotes lead-free and RoHS compliant.For pricing, delivery, and ordering information,please contact Maxim Direct at 1-888-629-4642,or visit Maxim’s website at .E v a l u a t e s : M A X 17021/M A X 17033/M A X 17034/M A X 17082MAX17082 Evaluation Kit 2_______________________________________________________________________________________Quick StartRecommended Equipment Before beginning, the following equipment is needed:•MAX17082 EV kit•7V to 24V, >100W power supply, battery, or note-book AC adapter•DC bias power supply, 5V at 1A•Two loads capable of sinking 25A each•Digital multimeter (DMM)•100MHz dual-trace oscilloscopeProcedure The MAX17082 EV kit is fully assembled and tested. Follow the steps below to verify board operation:1)Ensure that the circuit is connected correctly to thesupplies and dummy load prior to applying any power.2)Set SW2 (4, 7) and SW2 (5, 6) to the on positions.The DAC code settings (D6–D0) are set by switch SW1. Set SW1 (1, 14), SW1 (3, 12), SW1 (5, 10) and SW1 (7, 8) to the on positions. The output voltage is set for 0.9750V.3)Turn on the battery power before turning on the +5Vbias power.4)Observe the 0.9750V output voltage with the DMMand/or oscilloscope. Look at the LX switching nodes and MOSF ET gate-drive signals while varying the load current.Detailed Description of Hardware This 38A multiphase buck-regulator design is optimized for a 300kHz switching frequency (per phase) and out-put-voltage settings around 1V. At V OUT= 1V and V IN = 12V, the inductor ripple is approximately 45% (LIR = 0.45). The MAX17082 controller interleaves all the active phases, resulting in out-of-phase operation that minimizes the input and output filtering requirements.Component List (continued)Evaluates: MAX17021/MAX17033/MAX17034/MAX17082MAX17082 Evaluation Kit _______________________________________________________________________________________3E v a l u a t e s : M A X 17021/M A X 17033/M A X 17034/M A X 17082MAX17082 Evaluation Kit 4_______________________________________________________________________________________Table 1. MAX17082 Operating Mode Truth TableThe multiphase controller shares the current between two phases that operate 180°out-of-phase, supplying up to 19A per phase.Setting the Output VoltageThe MAX17082 has an internal digital-to-analog con-verter (DAC) that programs the output voltage. The out-put voltage can be digitally set from 0 to 1.5000V (Table 2) from the D0–D6 pins. There are two different ways of setting the output voltage:1)Drive the external VID0–VID6 inputs (all SW1positions are off).The output voltage is set by dri-ving VID0–VID6 with open-drain drivers (pullup resistors are included on the board) or 3V/5V CMOS output logic levels.2)Switch SW1.When SW1 positions are off, theMAX17082’s D0–D6 inputs are at logic 1 (connect-ed to VDD). When SW1 positions are on, D0–D6inputs are at logic 0 (connected to GND). The out-put voltage can be changed during operation by activating SW1 on and off. As shipped, the EV kit is configured with SW1 positions set for 0.9750V out-put (Table 2). Refer to the MAX17082 IC data sheet for more information.Evaluates: MAX17021/MAX17033/MAX17034/MAX17082MAX17082 Evaluation KitReduced Power-DissipationVoltage PositioningThe MAX17082 includes a transconductance amplifier for adding gain to the voltage-positioning sense path. The amplifier’s input is generated by summing the current-sense inputs, which differentially sense the voltage across the inductor’s DCR. The transconductance ampli-fier’s output connects to the voltage-positioned feedback input (FBAC), so the resistance between FBAC and V OUT (R17) determines the voltage positioning gain. Resistor R17 (2.74k Ω) provides a -1.9mV/A voltage-positioning slope at the output when all phases are active. Remote output and ground sensing eliminate any additional PCB voltage drops.Dynamic Output-Voltage Transition ExperimentThis MAX17082 EV kit is set to transition the output volt-age at 6.25mV/µs (SLOW = GND). The speed of the transition is altered by scaling resistors R2 and R3.During the voltage transition, watch the inductor current by looking at the current-sense inputs with a differential scope probe. Observe the low, well-controlled inductor current that accompanies the voltage transition. Slew-rate control during shutdown and startup results in well-controlled currents in to and out of the battery (input source).There are two methods to create an output-voltage transition. Select D0–D6 (SW1). Then either manually change the SW1 settings to a new VID code setting (Table 2), or disable all SW1 settings and drive the VID0–VID6 PCB test points externally to the desired code settings.E v a l u a t e s : M A X 17021/M A X 17033/M A X 17034/M A X 17082MAX17082 Evaluation Kit 6_______________________________________________________________________________________Evaluates: MAX17021/MAX17033/MAX17034/MAX17082MAX17082 Evaluation Kit_______________________________________________________________________________________7*Default position.Load-Transient ExperimentOne interesting experiment is to subject the output to large, fast load transients and observe the output with an oscilloscope. Accurate measurement of output rip-ple and load-transient response invariably requires that ground clip leads be completely avoided and the probe removed to expose the GND shield, so the probe can be directly grounded with as short a wire as possi-ble to the board. Otherwise, EMI and noise pickup cor-rupt the waveforms.Most benchtop electronic loads intended for power-supply testing lack the ability to subject the DC-DC converter to ultra-fast load transients. Emulating the supply current (di/dt) at the IMVP-6.5 VCORE pins requires at least 500A/µs load transients. An easy method for generating such an abusive load transient is to install a power MOSFET at the N7 location and install resistor R20 between 5m Ωand 10m Ωto monitor the transient current. Then drive its gate (TP1) with a strong pulse generator at a low-duty cycle (<5%) to minimize heat stress in the MOSF ET. Vary the high-level output voltage of the pulse generator to vary the load current.To determine the load current, you might expect to insert a meter in the load path, but this method is pro-hibited here by the need for low resistance and induc-tance in the path of the dummy-load MOSF ET. To determine how much load current a particular pulse-generator amplitude is causing, observe the current through inductor L1. In the buck topology, the load cur-rent is approximately equal to the average value of the inductor current.Note:CPU socket is based on the CALPELLA platform pin configuration.Switch SW2 SettingsShutdown SW2 (1, 10)When SHDN goes low (SW2 (1, 10) = on), the MAX17082 enters low-power shutdown mode. PWRGD is pulled low immediately and the output voltage ramps down at 1/8 the slew rate set by R2 and R3 (71.1k Ω). When the controller reaches the 0V target, the drivers are disabled (DL1 and DL2 driven high), the reference is turned off, and the IC supply currents drop to 1µA (max).When a fault condition activates the shutdown sequence (output undervoltage lockout or thermal shut-down), the protection circuitry sets the fault latch to prevent the controller from restarting. To clear the fault latch and reactivate the MAX17082, toggle SHDN or cycle V DD power.E v a l u a t e s : M A X 17021/M A X 17033/M A X 17034/M A X 17082MAX17082 Evaluation Kit 8_______________________________________________________________________________________DPRSLPVR SW2 (2, 9), PSI SW2 (3, 8)DPRSLPVR and PSI together determine the operating mode, as shown in Table 4. The MAX17082 will be forced into full-phase PWM mode during startup, while in boot mode, during the transition from boot mode to VID mode, and during shutdown.SLOW , SW2 (5, 6)This 1V logic input signal selects between the nominal and “slow” (half of nominal rate) slew rates. When SLOW is forced high, the selected nominal slew rate is set by the TIME resistance. When SLOW is forced low,the slew rate is reduced to half the nominal slew rate.PGDIN, SW2 (4, 7)PGDIN indicates the power status of other system rails and is used for power-supply sequencing. After power-up to the boot voltage, the output voltage remains at V BOOT , CLKEN remains high, and PWRGD remains low as long as the PGDIN stays low. When PGDIN is pulled high, the output transitions to selected VID voltage,and CLKEN is pulled low. If the system pulls PGDIN low during normal operation, the MAX17082 immediately drives CLKEN high, pulls PWRGD low, and slews the output to the boot voltage (using 2-phase pulse-skip-ping mode). The controller remains at the boot voltage until PGDIN goes high again, SHDN is toggled, or the V DD is cycled.Evaluates: MAX17021/MAX17033/MAX17034/MAX17082MAX17082 Evaluation Kit_______________________________________________________________________________________9Figure 1a. MAX17082 EV Kit Schematic (Sheet 1 of 2)E v a l u a t e s : M A X 17021/M A X 17033/M A X 17034/M A X 17082MAX17082 Evaluation Kit 10______________________________________________________________________________________Figure 1b. MAX17082 EV Kit Schematic (Sheet 2 of 2)Evaluates: MAX17021/MAX17033/MAX17034/MAX17082MAX17082 Evaluation Kit______________________________________________________________________________________11Figure 2. MAX17082 EV Kit Component Placement Guide—Component SideFigure 3. MAX17082 EV Kit PCB Layout—Component SideE v a l u a t e s : M A X 17021/M A X 17033/M A X 17034/M A X 17082MAX17082 Evaluation Kit12______________________________________________________________________________________Figure 4. MAX17082 EV Kit PCB Layout—Internal Layer 2(VBATT/PGND Plane)Figure 5. MAX17082 EV Kit PCB Layout—Internal Layer 3(Signal Layer)Evaluates: MAX17021/MAX17033/MAX17034/MAX17082MAX17082 Evaluation Kit______________________________________________________________________________________13Figure 6. MAX17082 EV Kit PCB Layout—Internal Layer 4(PGND Layer)Figure 7. MAX17082 EV Kit PCB Layout —Internal Layer 5(AGND/PGND Layer)E v a l u a t e s : M A X 17021/M A X 17033/M A X 17034/M A X 17082MAX17082 Evaluation Kit14______________________________________________________________________________________Figure 8. MAX17082 EV Kit PCB Layout —Internal Layer 6(Signal Layer)Figure 9. MAX17082 EV Kit PCB Layout —Internal Layer 7(PGND Layer)Evaluates: MAX17021/MAX17033/MAX17034/MAX17082MAX17082 Evaluation Kit______________________________________________________________________________________15Figure 10. MAX17082 EV Kit PCB Layout—Solder Side Figure 11. MAX17082 EV Kit Component Placement Guide—Solder SideMaxim cannot assume responsibility for use of any circuitry other than circuitry entirely embodied in a Maxim product. No circuit patent licenses areimplied. Maxim reserves the right to change the circuitry and specifications without notice at any time.16__________________Maxim Integrated Products, 120 San Gabriel Drive, Sunnyvale, CA 94086 408-737-7600©2009 Maxim Integrated Products Maxim is a registered trademark of Maxim Integrated Products, Inc.E v a l u a t e s : M A X 17021/M A X 17033/M A X 17034/M A X 17082MAX17082 Evaluation Kit Revision History。

PXIe-4080原理1. PXIe-4080概述- 定义与用途:PXIe-4080是一种高性能的数字多用途I/O模块,属于PXI Express(PXIe)标准的一部分。
其主要用途是在自动测试设备(ATE)和数据采集系统中进行精密测量和控制。
- 适用领域:PXIe-4080广泛应用于科学研究、工程实验、生产测试等领域。
其高精度、高速度、多通道的特性使其成为电子测量领域的重要组成部分。
- PXI Express标准:PXI Express是一种高性能的开放式模块化测试和测量平台标准,PXIe-4080符合PXI Express标准,提供了更高的带宽和更快的数据传输速度。
2. PXIe-4080的硬件架构- 模数转换器(ADC):PXIe-4080的核心是其高性能的模数转换器。
它采用了先进的ADC技术,实现对输入信号的精确数字化,保证了测量的准确性。
- 输入通道:PXIe-4080通常具有多个输入通道,每个通道都能独立地采集数据。
这使得同时测量多个信号成为可能,提高了测试效率。
- 时钟和同步:为了确保高精度测量,PXIe-4080配备了精密的时钟和同步系统。
这有助于实现多模块的同步操作,使得系统在高负载情况下依然能够保持高性能。
3. PXIe-4080的工作原理- 输入信号采集:当输入信号进入PXIe-4080时,模数转换器将其转换为数字信号。
这个过程包括采样和量化,确保了对输入信号的高精度测量。
- 数据处理与存储:转换后的数字信号经过数据处理单元,可以进行各种数学运算和滤波操作。
随后,数据可以存储在内部缓存或通过高速数据总线传输至主机。
- 触发机制:PXIe-4080通常配备强大的触发机制,可以根据特定的条件触发数据采集。
这使得用户能够选择在何时以何种条件进行测量,提高了灵活性。
4. PXIe-4080的软件支持- 驱动程序与API:为了充分发挥PXIe-4080的功能,它通常提供了相应的驱动程序和应用程序接口(API)。

General DescriptionThe MAX14878–MAX14880family of high-speed trans-ceivers improve communication and safety by integrating galvanic isolation between the CAN protocol controller side of the device and the physical wires of the network (CAN)bus.Isolation improves communication by breaking ground loops and reduces noise where there are large differences in ground potential between ports.The MAX14879provides up to2750V RMS(60s)of galvanic isolation,while the MAX14878/MAX14880provide up to 5000V RMS(60s)of galvanic isolation in8-pin and16-pin SOIC packages.All transceivers operate up to the maximum high-speed CAN data rate of1Mbps.The MAX14879/MAX14880fea-ture an integrated standby input(STB)on the isolated side of the transceiver to disable the driver and place the trans-ceiver in a low-power standby mode.The MAX14878does not include the standby input.The MAX14878–MAX14880transceivers feature integrat-ed protection for robust communication.The receiver input common-mode range is±25V,exceeding the ISO11898 specification of-2V to+7V,and are fault tolerant up to ±54V.Driver outputs/receiver inputs are also protected from±15kV electrostatic discharge(ESD)to GNDB on the bus side, as specified by the Human Body Model (HBM). Interfacing with CAN protocol controllers is simplified by the wide1.71V to5.5V supply voltage range(V DDA)on the controller side of the device.This supply voltage sets the interface logic levels between the transceiver and con-troller.The supply voltage range for the CAN bus side of the device is 4.5V to 5.5V (V DDB).The MAX14878–MAX14880are available in a wide-body 16-pin SOIC package with8mm of creepage and clear-ance.The MAX14878is also available in8-pin wide-body SOIC packages with5mm(MAX14878)and8mm (MAX14878W)creepage.All devices operate over the -40°C to +125°C temperature range.Applications●Industrial Controls●HVAC●Building Automation●Switching Gear Benefits and Features●Integrated Protection for Robust Communication• 2.75kV RMS, 3.5kV RMS, or 5kV RMS Withstand Isolation Voltage for 60s (Galvanic Isolation)•±25V Receiver Input Common-Mode Range•±54V Fault Protection on Receiver Inputs●High-Performance Transceiver Enables FlexibleDesigns•Wide 1.71V to 5.5V Supply for the CAN Controller Interface•Available 16-pin and 8-pin SOIC Package Pin Configurations•Data Rates up to 1Mbps (Max)•Dominant Timeout ProtectionSafety Regulatory Approvals●UL According to UL1577 (Basic Insulation) (16-PinPackage Devices Only)Ordering Information appears at end of data sheet.Click here to ask about the production status of specific part numbers.MAX14878–MAX14880 2.75kV, 3.5kV, and 5kV Isolated CANTransceiversSimplified Block DiagramAbsolute Maximum RatingsV DDA to GNDA.........................................................-0.3V to +6V V DDB to GNDB.........................................................-0.3V to +6V TXD to GNDA...........................................................-0.3V to +6V RXD to GNDA...........................................-0.3V to (V DDA+ 0.3V) STB to GNDB...........................................................-0.3V to +6V I.C. to GNDB.............................................-0.3V to (V DDB+ 0.3V) CANH or CANL to GNDB, (Continuous).................-54V to +54V Short-Circuit Duration (CANH to CANL).....................Continuous Short-Circuit Duration (RXD to GNDA or V DDA)........Continuous Continuous Power Dissipation (T A= +70ºC)16-pin W SOIC (derate 14.1mW/°C above +70°C)..1126.8mW 8-pin W SOICW8MS+1 (derate 9.39mW/°C above +70°C)........751.17mW W8MS+5 (derate 11.35mW/°C above +70°C)......908.06mW Operating Temperature Range.............................-40ºC to 125ºC Junction Temperature.......................................................+150ºC Storage Temperature Range..............................-60ºC to +150ºC Lead Temperature (soldering, 10s)...................................+300ºC Soldering Temperature (reflow)........................................+260ºCNOTE:See the Isolation section of the Electrical Characteristics table for maximum voltage from GNDA to GNDBStresses beyond those listed under “Absolute Maximum Ratings” may cause permanent damage to the device. These are stress ratings only, and functional operation of the device at these or any other conditions beyond those indicated in the operational sections of the specifications is not implied. Exposure to absolute maximum rating conditions for extended periods may affect device reliability.Package InformationFor the latest package outline information and land patterns (footprints), go to /packages. Note that a “+”, “#”, or “-” in the package code indicates RoHS status only. Package drawings may show a different suffix character, but the drawing pertains to the package regardless of RoHS status.Package thermal resistances were obtained using the method described in JEDEC specification JESD51-7, using afour-layer board. For detailed information on package thermal considerations, refer to / thermal-tutorial.Electrical Characteristics(V DDA=1.71V to5.5V,V DDB=4.5V to5.5V,T A=-40°C to+125°C,STB or I.C.=GNDB.Typical values are at T A=+25°C with GNDA = GNDB, V DDA= 3.3V, V DDB= 5V. (Notes 1, 2)PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS POWERProtocol Controller Side(A-Side) Voltage SupplyV DDA 1.71 5.5V CAN Bus Side (B-Side)Voltage SupplyV DDB 4.5 5.5VV DDA Supply Current I DDA V DDA= 5V0.340.83mA V DDA= 3.3V0.340.76V DDA= 1.8V0.330.64V DDB Supply Current I DDB V DDB= 5V, TXD = GNDA,R L= open4.37.3mA V DDB= 5V, TXD = GNDA, R L= 60Ω47.667.3V DDB= 5V, TXD = V DDA, R L= 60Ω 3.2V DDB= 5V, CANH shorted to CANL,TXD = V DDA3.2V DDB= 5V, CANH shorted to CANL,TXD = GNDA94140V DDB= 5V, TXD = V DDA, R L= 60Ω,STB = V DDB(MAX14879/MAX14880)0.40.8V DDA UndervoltageLockout Threshold,RisingV DDAUVLO_R 1.66VV DDA Undervoltage-Lockout Threshold,FallingV DDAUVLO_F 1.3 1.55VV DDB Undervoltage-Lockout Threshold,RisingV DDBUVLO_R 4.25VV DDB Undervoltage-Lockout Threshold,FallingV DDBUVLO_F 3.45V CANH, CANL TRANSMITTERDominant Output Voltage V O(DOM)V TXD= 0V,R L= 50Ω to 65ΩCANH 2.75 4.5VCANL0.5 2.25Electrical Characteristics (continued)(V DDA=1.71V to5.5V,V DDB=4.5V to5.5V,T A=-40°C to+125°C,STB or I.C.=GNDB.Typical values are at T A=+25°C with GNDA = GNDB, V DDA= 3.3V, V DDB= 5V. (Notes 1, 2)PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITSDominant Differential Bus Output Voltage V OD(V CANH- V CANL),V TXD= 0V,R L= 50Ω to65Ω, Figure 1R CM is open 1.53V (V CANH- V CANL),V TXD= 0V,R L= 50Ω to65Ω, Figure 2R CM= 1.25kΩ,-17V < V CM<+17V1.53(V CANH- V CANL),V TXD= 0V,R L= 50Ω to65Ω, Figure 3RCM = 1.25kΩ,-25V < VCM <+25V1.13Recessive Voltage Output V ORV TXD= V DDA,No loadCANH23VCANL23Short-Circuit Current I SHORT V TXD= 0V CANH shorted toGNDB5075100mA CANL shorted toVDDB5075100Recessive Differential Bus Output Voltage V ODR(V CANH- V CANL),V TXD= V DDARL is open-500+50mVRL = 60Ω-120+12CANH/CANL OutputVoltage in Standby Mode V STBMAX14879/MAX14880 only,V TXD= V DDA, No load, STB = V DDB70175mVDC BUS RECEIVER (CANH and CANL externally driven)Common Mode Input Range V CMCANH or CANL toGNDB, RXDoutput validNormal operation-25+25VStandby mode(MAX14879/MAX14880 only)-12+12Differential Input Voltage V DIFF V TXD= V DDA Recessive0.5V Dominant, No load0.9Differential InputHysteresisV DIFF(HYST)125mVStandby Mode Differential Input Voltage MAX14879/MAX14880 only,V TXD= V DDA,V STB= V DDBRecessive0.45VDominant 1.15Common-Mode Input Resistance R INV TXD= V DDA, R IN= ΔV/∆I,∆V = +300mV, V STB= GNDB(MAX14879/MAX14880)1050kΩDifferential Input Resistance R IDV TXD= V DDA, R IN= ∆V/∆I,∆V = +300mV, V STB= GNDB(MAX14879/MAX14880)20100kΩInput Leakage Current I LKG V DDB= 0V, V CANH= V CANL= 5V310μA Input Capacitance C IN CANH or CANL to GNDB (Note 3)14.420pFElectrical Characteristics (continued)(V DDA=1.71V to5.5V,V DDB=4.5V to5.5V,T A=-40°C to+125°C,STB or I.C.=GNDB.Typical values are at T A=+25°C with GNDA = GNDB, V DDA= 3.3V, V DDB= 5V. (Notes 1, 2)PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS Differential InputCapacitanceC IND CANH to CANL (Note 3)7.210pF LOGIC INTERFACE (RXD, TXD, STB)Input High Voltage V IH TXD 1.71V ≤ V DDA<2.25V0.75 xV DDAV 2.25V ≤ V DDA≤5.5V0.7 xV DDASTB (MAX14879/MAX14880 only)0.7 xV DDBInput Low Voltage V IL TXD, 1.71 ≤ V DDA< 2.25V0.7V TXD, 2.25V ≤ V DDA≤ 5.5V0.8STB (MAX14879/MAX14880 only)0.8Output High Voltage V OH RXD, I SOURCE= 4mA V DDA-0.4VOutput Low Voltage V OL RXD, I SINK= 4mA0.4V Input Pullup Current I PU TXD-10-5-1.5μA Input PulldownResistanceR PD STB (MAX14879/MAX14880 only)75250kΩInput Capacitance5pF PROTECTIONFault Protection Range CANH to GNDB, CANL to GNDB-54+54VESD Protection (CANH and CANL to GNDB)IEC 61000-4-2 Air-Gap Discharge±10kV IEC 61000-4-2 Contact Discharge±5Human Body Model±15ESD Protection (CANH and CANL to GNDA)IEC 61000-4-2 Contact Discharge±3kV IEC 61000-4-2 Air Gap Discharge, 330pFcapacitor connected between GNDA andGNDB±10ESD Protection (AllOther Pins)Human body model±2kV Thermal ShutdownThresholdTemperature rising+160°C Thermal ShutdownHysteresis13°CElectrical Characteristics - Switching(V DDA=1.71V to5.5V,V DDB=4.5V to5.5V,T A=-40°C to+125°C,STB or I.C.=GNDB.Typical values are at T A=+25°C with GNDA = GNDB, V DDA= 3.3V, V DDB= 5V, STB = GNDB.)PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITSDifferential Driver Output Rise Time t RR L= 60Ω, C L= 100pF, R CM isopen, Figure 120nsElectrical Characteristics - Switching (continued)(V DDA=1.71V to5.5V,V DDB=4.5V to5.5V,T A=-40°C to+125°C,STB or I.C.=GNDB.Typical values are at T A=+25°C with GNDA = GNDB, V DDA= 3.3V, V DDB= 5V, STB = GNDB.)PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITSDifferential Driver Output Fall Time t FR L= 60Ω, C L= 100pF, R CM isopen, Figure 133nsTXD to RXD Loop Delay t LOOP R L= 60Ω, C L= 100pF,C RXD= 15pF, Dominant to recessive andrecessive to dominant. Figure 2210nsTXD Propagation Delay t PDTXD_RDR L= 60Ω,C L= 100pF,R CM open,Figure 1Recessive toDominant95ns t PDTXD_DRR L= 60Ω,C L= 100pF,R CM open,Figure 2Dominant toRecessive95RXD Propagation Delay t PDRXD_RDC L= 15pF,Figure 3Recessive toDominant115ns t PDRXD_DRC L= 15pF,Figure 4Dominant toRecessive115TXD Dominant Timeout t DOM(Note 4) 1.4 4.8msUndervoltage Detection Time to Normal Operation t UV(VDDA),t UV(VDDB)110230μsWake-up Time to Dominant State t WAKEMAX14879/MAX14880 only, Instandby mode (V STB= V DDB), Figure 40.55μsStandby Propagation Delay MAX14879/MAX14880 only, RXD,Dominant to recessive, V STB= V DDB,C L= 15pF285500nsStandby to NormalMode Delayt EN MAX14879/MAX14880 only40μsNormal to Standby Dominant Mode Delay MAX14879/MAX14880 only,(V CANH- V CANL) > 1.2V65μsElectrical Characteristics–Package Insulation and Safety Related Specifications: W 16-SOIC(V DDA=1.71V to5.5V,V DDB=4.5V to5.5V,T A=-40°C to+125°C,STB or I.C.=GNDB.Typical values are at T A=+25°C with GNDA = GNDB, V DDA= 3.3V, V DDB= 5V, STB = GNDB.) (Note 5)PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS Insulation Resistance RIO T A= 25°C, V IO= 500V>1012ΩBarrier Capacitance C IO GNDA to GNDB2pF Minimum CreepageDistanceCPG8mm Minimum ClearanceDistanceCLR8mm Internal Clearance Distance through insulation0.015mmElectrical Characteristics–Package Insulation and Safety Related Specifications: W 16-SOIC (continued)(V DDA=1.71V to5.5V,V DDB=4.5V to5.5V,T A=-40°C to+125°C,STB or I.C.=GNDB.Typical values are at T A=+25°C with GNDA = GNDB, V DDA= 3.3V, V DDB= 5V, STB = GNDB.) (Note 5)PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS Comparative TrackingIndexCTI550Electrical Characteristics–Package Insulation and Safety Related Specifications: W 8-SOIC(V DDA-V GNDA=1.71V to5.5V,V DDB-V GNDB=1.71V to5.5V,C L=15pF,T A=-40°C to+125°C,unless otherwise noted.Typical values are at V DDA- V GNDA= 3.3V, V DDB- V GNDB= 3.3V, GNDA = GNDB, T A= 25°C, unless otherwise noted.) (Notes 2,3) PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS Insulation Resistance RIO T A= 25°C, V IO= 500V> 1012ΩBarrier Capacitance C IO GNDA to GNDB2pFMinimum Creepage Distance CPGMAX14878 5.5mm MAX14878W8Minimum Clearance Distance CLRMAX14878 5.5mm MAX14878W8Internal Clearance Distance through insulation0.015mm Comparative TrackingIndexCTI>400Electrical Characteristics–Insulation Characteristics (As Defined by VDE 0884-10): W 16-SOIC(V DDA=1.71V to5.5V,V DDB=4.5V to5.5V,T A=-40°C to+125°C,STB or I.C.=GNDB.Typical values are at T A=+25°C with GNDA = GNDB, V DDA= 3.3V, V DDB= 5V, STB = GNDB.) (Note 5)PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITSPartial Discharge V PR Method B1 =V IORM x 1.875(t = 1s, partialdischarge < 5pC)MAX148791182V PMAX14878/MAX148802250Maximum Repetitive Peak Voltage V IORMMAX14879630V P MAX14878/MAX148801200Maximum Working Voltage V IOWMGNDA to GNDBcontinuousMAX14879445V RMSMAX14878/MAX14880848Maximum Transient Overvoltage V IOTMMAX148794600V P MAX14878/MAX148808400Isolation Voltage V ISO GNDA to GNDB for60sMAX14879 2.75kV RMSMAX14878/MAX148805Electrical Characteristics–Insulation Characteristics (As Defined by VDE 0884-10): W 16-SOIC (continued)(V DDA=1.71V to5.5V,V DDB=4.5V to5.5V,T A=-40°C to+125°C,STB or I.C.=GNDB.Typical values are at T A=+25°C with GNDA = GNDB, V DDA= 3.3V, V DDB= 5V, STB = GNDB.) (Note 5)PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITS Maximum SurgeIsolation VoltageV IOSM IEC 61000-4-5, Basic insulation10kV Barrier Resistance R S T A= +150°C, V IO= 500V>109ΩClimate Category 40/125/21Pollution Degree DIN VDE 0110, Table 12Electrical Characteristics–Insulation Characteristics: W 8-SOIC(V DDA=1.71V to5.5V,V DDB=4.5V to5.5V,T A=-40°C to+125°C,STB or I.C.=GNDB.Typical values are at T A=+25°C with GNDA = GNDB, V DDA= 3.3V, V DDB= 5V, STB = GNDB.) (Note 5)PARAMETER SYMBOL CONDITIONS MIN TYP MAX UNITSMaximum Repetitive Peak Voltage V IORMMAX14878630V P MAX14878W1200Maximum Working Voltage V IOWMGNDA to GNDBcontinuousMAX14878445V RMSMAX14878W848Maximum Transient Overvoltage V IOTMMAX148785000V P MAX14878W8400Isolation Voltage V ISO GNDA to GNDB for60sMAX14878 3.5kV RMSMAX14878W5Maximum SurgeIsolation VoltageV IOSM IEC 61000-4-5, Basic insulation10kV Barrier Resistance R S T A= +150°C, V IO= 500V>109ΩClimate Category 40/125/21Pollution Degree2Note 1:All devices 100% production tested at T A= +25°C. Specifications over temperature are guaranteed by design.Note 2:All currents into the device are positive.All currents out of the device are negative.All voltages referenced to their respective ground (GNDA or GNDB), unless otherwise noted.Note 3:Not production tested. Guaranteed at T A= +25°C.Note 4:The dominant timeout feature releases the bus when TX is held low longer than t DO.CAN protocol guarantees a maximum of11successive dominant bits in any transmission.The minimum data rate allowed by the dominant timeout,then,is11/ t DO(min).Note 5:All16-pin package devices are100%production tested for high voltage conditions(this does not apply to the8-pin MAX14878AWA).Typical Operating Characteristics(V DDA= 3.3V, V DDB= 5V, 60Ω load between CANH and CANL, T A= +25°C, unless otherwise noted.)Typical Operating Characteristics (continued)(V DDA= 3.3V, V DDB= 5V, 60Ω load between CANH and CANL, T A= +25°C, unless otherwise noted.)Pin DescriptionPINNAME FUNCTIONREFSUPPLYTYPEMAX14878 16-PIN MAX148788-PINMAX14879,MAX14880CONTROLLER SIDE (A-SIDE)131V DDA Power Supply Input for theController Side/A-Side. BypassV DDA to GNDA with 0.1μFcapacitor as close to the deviceas possible.V DDA Power2, 842, 8GNDA Controller Side/A-Side Ground V DDA Ground315RXD Receiver Output. RXD is highwhen the bus is in the recessivestate. RXD is low when the bus isin the dominant state.V DDA Digital Output4, 5, 7-4, 6, 7N.C.No Connection. Not internally connected. Connect to GNDA, V DDA, or leave unconnected.623TXD Transmit Data Input. CANH andCANL are in the dominant statewhen TXD is low. CANH andCANL are in the recessive statewhen TXD is high.V DDA Digital InputCAN BUS SIDE (B-SIDE)9, 1559, 15GNDB CAN Bus Side/B-Side Ground V DDB Ground10, 14-10I.C.Internally Connected. Connect to GNDB or leave unconnected.11-11I.C Internally Connected. Connect to GNDB, V DDB, or leave unconnected.12612CANL Low-Level CAN Differential BusLineV DDBDifferentialI/O13713CANH High-Level CAN Differential BusLineV DDBDifferentialI/OPin Description (continued)PINNAME FUNCTIONREFSUPPLYTYPEMAX14878 16-PIN MAX148788-PINMAX14879,MAX14880--14STB Standby Input, Active High. DriveSTB high to disable the CAN busdriver and place the transceiverin low-power standby mode.Drive STB low for normaloperation.V DDB Digital Input16816V DDB Power Supply Input for the CANBus Side/B-Side. Bypass V DDBto GNDB with a 0.1μF capacitoras close to the device aspossible.V DDB PowerDetailed DescriptionThe MAX14878–MAX14880isolated controller area network(CAN)transceivers provide2750V RMS or5000V RMS(60s) of galvanic isolation between the cable side(B-side)of the transceiver and the controller side(A-side).These devices allow up to1Mbps communication across an isolation barrier when a large potential exists between grounds on each side of the barrier.CANH and CANL outputs are short-circuit current limited and are protected against excessive power dissipation by thermal shutdown circuitry that places the driver outputs in a high-impedance state.IsolationData isolation is achieved using integrated capacitive isolation that allows data transmission between the controller side and cable side of the transceiver.Fault ProtectionThe MAX14878–MAX14880feature±54V fault protection on the CANH and CANL bus lines.When CANH or CANL is pulled above+30V(typ)or below-30V(typ),the I/O is set to high impedance.This wide fault protection range simplifies selecting external TVS components for surge protection.TransmitterThe transmitter converts a single-ended input signal(TXD)from the CAN controller to differential outputs for the bus lines (CANH, CANL). The truth table for the transmitter and receiver is given in Table 1.Transmitter Dominant TimeoutThe MAX14878–MAX14880feature a transmitter-dominant timeout(t DOM)that prevents erroneous CAN controllers from clamping the bus to a dominant level by maintaining a continuous low TXD signal.When TXD remains in the dominant state (low) for greater than t DOM, the transmitter is disabled, releasing the bus to a recessive state (Table 1).After a dominant timeout fault, normal transmitter function is re-enabled on the rising edge of a TXD.The transmitter-dominant timeout limits the minimum possible data rate to 9kbps for standard CAN protocol.Driver Output ProtectionThe MAX14878–MAX14880feature integrated circuitry to protect the transmitter output stage against a short-circuit to a positive or negative voltage by limiting the driver current.The transmitter returns to normal operation once the short is removed.Thermal shutdown further protects the transceiver from excessive temperatures that may result from a short by setting the transmitter outputs to high impedance when the junction temperature exceeds+160°C(typ).The transmitter returns to normal operation when the junction temperature falls below the thermal shutdown hysteresis.ReceiverThe receiver reads the differential input from the bus(CANH,CANL)and transfers this data as a single-ended output (RXD)to the CAN controller.During normal operation,a comparator senses the difference between CANH and CANL, V DIFF=(V CANH-V CANL),with respect to an internal threshold of0.7V(typ).If V DIFF>0.9V,a logic-low is present on RXD. If V DIFF< 0.5V, a logic-high is present.The CANH and CANL common-mode range is±25V.RXD is logic-high when CANH and CANL are shorted or terminated and undriven.Thermal ShutdownIf the junction temperature exceeds+160°C(typ),the device is switched off.During thermal shutdown,CANH and CANL are high-impedance and all IC functions are disabled.The transmitter outputs are re-enabled and the device resumes normal operation when the junction temperature drops below 147°C (typ).Table 1. Transmitter and Receiver Truth Table When Not Connected to the Bus TXD TXD LOW TIME CANH CANL BUS STATE RXD LOW< t DOM HIGH LOW DOMINANT LOW LOW> t DOM V DDB/2V DDB/2RECESSIVE HIGH HIGH X V DDB/2V DDB/2RECESSIVE HIGHApplications InformationReduced EMI and ReflectionsIn multidrop CAN applications,it is important to maintain a single linear bus of uniform impedance that is properly terminated at each end. A star configuration should never be used.Any deviation from the end-to-end wiring scheme creates a stub.High-speed data edges on a stub can create reflections back down the bus.These reflections can cause data errors by eroding the noise margin of the system.Although stubs are unavoidable in a multidrop system,care should be taken to keep these stubs as short as possible,especially when operating with high data rates.Typical Operating CircuitOrdering InformationPART NUMBER ISOLATION VOLTAGE (kV RMS)STANDBY OPERATING TEMPERATURE PACKAGE MAX14878AWA+ 3.5NO-40°C to +125°C W 8-SOIC MAX14878AWA+T 3.5NO-40°C to +125°C W 8-SOIC MAX14878AWE+5NO-40°C to +125°C W 16-SOIC MAX14878AWE+T5NO-40°C to +125°C W 16-SOIC MAX14878WAWA+5NO-40°C to +125°C W 8-SOIC MAX14878WAWA+T5NO-40°C to +125°C W 8-SOIC MAX14879AWE+ 2.75YES-40°C to +125°C W 16-SOIC MAX14879AWE+T 2.75YES-40°C to +125°C W 16-SOIC MAX14880AWE+5YES-40°C to +125°C W 16-SOIC MAX14880AWE+T5YES-40°C to +125°C W 16-SOICRevision HistoryREVISION NUMBER REVISIONDATEDESCRIPTIONPAGESCHANGED06/17Initial release—18/17Updated parameters in Electrical Characteristics table and added Typical Operating Circuit7, 14 210/17Corrected the Pin Description section for internally connected pins; updated Figure 29, 12 33/18Updated the Safety Regulatory Approvals section1 46/18Updated Pin Description table1253/19Updated the General Description, Benefits and Features, Package Information, Electrical Characteristics, Pin Configuration, and Pin Description to add a Wide 8-Pin SOIC package;added MAX14878AWA+ and MAX14878AWA+T to the Ordering Information table1, 3, 8,12, 1465/19Updated the General Description, Benefits and Features, Safety Regulatory Approvals,Electrical Characteristics–Package Insulation and Safety Related Specifications: W 8-SOIC, Electrical Characteristics–Insulation Characteristics (As Defined by VDE 0884-10): W16-SOIC, Electrical Characteristics–Insulation Characteristics: W 8-SOIC, and OrderingInformation sections1–16709/20Updated the General Description, Absolute Maximum Ratings, Package Information,Electrical Characteristics–Package Insulation and Safety Related Specifications: W 8-SOIC,Electrical Characteristics–Insulation Characteristics: W 8-SOIC, and Ordering Informationsections1, 3, 8-9,19For pricing, delivery, and ordering information, please visit Maxim Integrated’s online storefront at https:///en/storefront/storefront.html. Maxim Integrated cannot assume responsibility for use of any circuitry other than circuitry entirely embodied in a Maxim Integrated product. No circuit patent licenses are implied. Maxim Integrated reserves the right to change the circuitry and specifications without notice at any time. The parametric values (min and max limits) shown in the Electrical Characteristics table are guaranteed. Other parametric values quoted in this data sheet are provided for guidance.。

General DescriptionThe MAX14871 evaluation kit (EV kit) consists of a MAX14871 evaluation board. The EV kit is a fully assembled and tested circuit board that evaluates the MAX14871 full-bridge DC motor driverThe EV kit is designed to work as either a stand-alone board or with a software interface, demonstrating all of the major features of the device.Features●Operates From a Wide 4.5V to 36V Supply ●Standalone or Software-Controlled Operation ●Proven PCB Layout●Fully Assembled and TestedOrdering Information appears at end of data sheet.19-7699; Rev 0; 6/15Quick StartRecommended Equipment• MAX14871 EV kit• User-supplied Windows XP®, Windows Vista®, or Windows 7 PC with a spare USB port.• 24V, 1A power supply• DC brushed motorProcedureThe EV kit is fully assembled and tested. Follow the steps below to verify board operation before exercising the full features of the device:1) Verify that all jumpers are in their default positions, asshown in Table 1.2) Connect the 24V DC power supply on the VCC andGND connectors on the EV kit board.3) See application note Using the MAX14871EVKIT withsoftware to configure the board for software operation.4) Connect the DC brushed motor to the M1 and M2terminals in the J12 connector.5) Turn on the 24V power supply.Detailed Description of HardwareThe MAX14871 EV kit is a fully tested circuit board demonstrating the capabilities of the MAX14871 motor driver.Stand-Alone OperationRemove all of the shunts on the P2 header for stand-alone operation. On-board LDOs generate logic rails and headers are included for device configuration in stand-alone mode.On-Board LDOThe MAX15006 (U5) on-board LDO generates 3.3V for logic signals and for powering the fault LED. The 3.3V LDO also powers the on-board ICM7556 PWM signal generator.On-Board PWM GeneratorThe ICM7556 (U2) general-purpose timer circuit is available to generate PWM signals for switching either the PWM or DIR inputs. Adjust the R1 potentiometer to change the duty cycle of the output signal.The EV kit comes with the PWM frequency set up to 1kHz but can be adjusted up to 10kHz by changing the C3 capacitor. Set the PWM frequency using the following equation:f SW = 1.46/ [(R29 + 2 x R32) x C3]Motor OperationThe MAX14871 is capable of operating in any one of three current regulation modes: fast decay, slow decay, or 25% ripple current mode. T o set the mode, apply a voltage to VMODE and VREF (Table 2).V REFSet the V REF voltage to limit the motor current using the following equation:V REF = I MOTOR x A V x R SENSEFor easy evaluation, J6 can be used to set the V REF voltage to 3.3V or 0V. Connect 1-2 on J6 to set V REF to 3.3V. Connect 2-3 on J6 to set V REF to 0V.MODEThe J7 jumper can be used to set the MODE voltage high (3.3V) or low (0V). For 25% ripple mode, however, the MODE voltage must be between 0.5V and 1V. Apply an external voltage to the MODE test point, or connect a resistor divider on the R3 and R5 resistor pads to set the MODE voltage for this mode of operation.Fault Indicator LEDThe FAULT output is connected to the 3.3V logic supply through R4. LED1 turns on during a fault condition.Windows Vista and Windows XP are registered trademarks and registered service marks of Microsoft Corporation.Table 1. Jumper DescriptionsJUMPER SHUNT POSITON DESCRIPTIONJ11-2PWM is high. 2-3PWM is low.J21-2DIR is high. 2-3DIR is low.J31-2*SNS is connected to COM. 2-3SNS is connected to GND.J41-2Output of the on-board pulse generator circuit is connected to PWM. 2-3Output of the on-board pulse generator circuit is connected to DIR.J51-2EN is high. 2-3EN is low.J61-2VREF is connected to 3.3V. 2-3VREF is connected to 0V.J71-2MODE is connected to 3.3V.2-3MODE is connected to 0V.Open*V MODE is set by the software or by the R3 and R5 voltage divider. R3 and R5 areDNI.J8Open*COM is not shorted to ground. Closed COM is shorted to ground.J9Open*This jumper is used to program the on-board microcontroller. Do not shunt this jumper.ClosedJ10Open*This jumper is used to program the on-board microcontroller. Do not shunt this jumper.ClosedJ11Open*This jumper is used to program the on-board microcontroller. Do not shunt this jumper.ClosedJ131-2*VREF is set by the on-board microcontroller circuitry.3-4*MODE is set by the on-board microcontroller circuitry.5-6*FAULT is connected to the microcontroller.7-8*PWM signal is generated by the on-board microcontroller. 9-10*DIR signal is generated by the on-board microcontroller. 11-12*EN signal is generated by the on-board microcontroller.*Default position.INPUTSOPERATING MODEEN V REF MODE V SNS0< 0.2V X< 0.1V Normal PWM Operation. No current regulation.0< 0.2V V MODE < 0.5V> 0.1V Current regulation based on 15μs (typ) fixed off-time control with fast decay using internal V REF.0< 0.2V0.5V < V MODE < 1V> 0.1V Current regulation based on 25% current ripple fast decay using internal V REF.0< 0.2V V MODE > 1.5V> 0.1V Current regulation based on 15μs (typ) fixed off-time control with slow decay using internal V REF.0> 0.4V X< V VREF/10Normal PWM Operation. No current regulation.0> 0.4V V MODE < 0.5V> V VREF/10Current regulation based on fixed TOFF-time control with fast decay using external V REF.0> 0.4V0.5V < V MODE < 1V > V VREF/10Current regulation based on 25% current ripple fast decay using external V REF.0> 0.4V V MODE > 1.5V> V VREF/10Current regulation based on fixed TOFF-time control with slow decay using external V REF.Table 2. Current Regulation Logic X = Don’t careOrdering InformationPART TYPEMAX14871EVKIT#EV Kit#Denotes RoHS compliant.Component InformationSee the following links for component information, PCB files, and schematics:●MAX14871 EV BOM●MAX14871 EV Schematic●MAX14871 EV PCBMaxim Integrated cannot assume responsibility for use of any circuitry other than circuitry entirely embodied in a Maxim Integrated product. No circuit patent licenses are implied. Maxim Integrated reserves the right to change the circuitry and specifications without notice at any time.REVISION NUMBERREVISION DATE DESCRIPTIONPAGES CHANGED6/15Initial release—Revision HistoryFor pricing, delivery, and ordering information, please contact Maxim Direct at 1-888-629-4642, or visit Maxim Integrated’s website at .ITEM QTY REF DES MFG PART #MANUFACTURER VALUE DESCRIPTION18C1,C2,C6,C7,C19,C25,C26,C290.1UFCAPACITOR; SMT (0603); CERAMIC CHIP; 0.1UF; 16V; TOL=10%; MODEL=; TG=-55 DEGC TO +125 DEGC; TC=X7R; NOT RECOMMENDED FOR NEW DESIGN USE 20-000u1-0123C3,C30,C310.01UF CAPACITOR; SMT (0603); CERAMIC CHIP; 0.01UF; 50V; TOL=5%; MODEL=X7R; TG=-55 DEGC TO +125 DEGC;TC=+/32C4,C51UF CAPACITOR; SMT (1206); CERAMIC CHIP; 1UF; 50V; TOL=10%; TG=-55 DEGC TO +125 DEGC; TC=X7R41C8220PFCAPACITOR; SMT (0603); CERAMIC CHIP; 220PF; 50V; TOL=5%; MODEL=PPS; TG=-55 DEGC TO +85 DEGC; TC=+/-51C9 2.2UFCAPACITOR; SMT (0603); CERAMIC CHIP; 2.2UF; 25V; TOL=10%; MODEL=; TG=-55 DEGC TO +85 DEGC; TC=X5R61C100.1UFCAPACITOR; SMT (0603); CERAMIC CHIP; 0.1UF; 50V; TOL=10%; MODEL=C SERIES; TG=-55 DEGC TO +85 DEGC;TC=X5R74C11,C15,C17,C23 4.7UF CAPACITOR; SMT; 0603; CERAMIC; 4.7uF; 10V; 10%; X5R; -55degC to + 85degC; 0 +/-15% degC MAX.87C12,C14,C16,C20-C22,C241UFCAPACITOR; SMT (0603); CERAMIC CHIP; 1UF; 25V; TOL=10%; MODEL=GRM SERIES; TG=-55 DEGC TO +125DEGC; TC=X7R91C13330UF CAPACITOR; THROUGH HOLE-RADIAL LEAD; ALUMINUM-ELECTROLYTIC; 330UF; 50V; TOL=20%; MODEL=EB SERIES;TG=-40 DEGC TO +105 DEGC102C27,C2818PFCAPACITOR; SMT (0603); CERAMIC CHIP; 18PF; 50V; TOL=5%; MODEL=; TG=-55 DEGC TO +125 DEGC; TC=C0G119EN,M1,M2,DIR,PWM,SNS,MODE,VREF,FAULT5014KEYSTONE N/ATEST POINT; PIN DIA=0.125IN; TOTAL LENGTH=0.445IN;BOARD HOLE=0.063IN; YELLOW; PHOSPHOR BRONZEWIRE SILVER PLATE FINISH; RECOMMENDED FOR BOARDTHICKNESS=0.062IN; NOT FOR COLD TEST124GND,TP1,TP5,TP95011KEYSTONE N/ATEST POINT; PIN DIA=0.125IN; TOTAL LENGTH=0.445IN; BOARD HOLE=0.063IN; BLACK; PHOSPHOR BRONZE WIRE SILVER PLATE FINISH; RECOMMENDED FOR BOARD THICKNESS=0.062IN; NOT FOR COLD TEST137J1-J7PCC03SAAN SULLINS PCC03SAANCONNECTOR; MALE; THROUGH HOLE; BREAKAWAY; STRAIGHT THROUGH; 3PINS; -65 DEGC TO +125 DEGC141J8PCC02SAAN SULLINS PCC02SAANCONNECTOR; MALE; THROUGH HOLE; BREAKAWAY; STRAIGHT THROUGH; 2PINS; -65 DEGC TO +125 DEGC153J9-J11PEC02SAAN SULLINS PEC02SAAN CONNECTOR; MALE; THROUGH HOLE; BREAKAWAY;STRAIGHT; 2PINS; -65 DEGC TO +125 DEGC161J121935200PHOENIXCONTACT1935200CONNECTOR; FEMALE; THROUGH HOLE; GREENTERMINAL BLOCK; STRAIGHT; 6PINS171J13PEC06DAANSULLINSELECTRONICSCORP.PEC06DAANCONNECTOR; MALE; THROUGH HOLE; BREAKAWAY;STRAIGHT; 12PINS; -65 DEGC TO +125 DEGC181L1BLM21AG601SN1D MURATA600INDUCTOR; SMT (0805); FERRITE-BEAD; 600; TOL=+/-25%;0.2ABill of Materials DATE: 01/08/2015 DESIGN: max14871_evkit_a Revision_Type : PRODUCTION193LED1-LED3597-3111-407F DIALIGHT 597-3111-407F DIODE; LED; SMT LED; RED; SMT (1206); PIV=4V; IF=0.03A 201LED4597-3311-407F DIALIGHT 597-3311-407F DIODE; LED; STANDARD; GREEN; SMT (1206); PIV=2.1V;IF=0.02A211P410118193-0001LF FCI CONNECT10118193-0001LF CONNECTOR; FEMALE; SMT; MICRO USB B TYPERECEPTACLE; RIGHT ANGLE; 5PINS222Q2,Q3MMBT3904N/AMMBT3904TRANSISTOR, NPN, SOT-23, PD=0.225W, IC=0.2A,VCEO=40V231R1PVZ3A103C01?10K RESISTOR; SMT J-LEAD; TRIMMER POTENTIOMETER; 1 TURN; 10K OHM; 30%; 500PPM; 0.1W; TADJ; CARBONFILM248R2,R7,R13,R21-R23,R27,R2810K RESISTOR; 0603; 10K OHM; 1%; 100PPM; 0.0125W; THICKFILM251R4270RESISTOR, 0805, 270 OHM, 1%, 100PPM, 0.125W, THICKFILM261R634K RESISTOR; 0603; 34K OHM; 1%; 100PPM; 0.10W; THICKFILM272R9,R261K RESISTOR; 0603; 1K OHM; 1%; 100PPM; 0.10W; THICKFILM 281R100.1RESISTOR; 2512; 0.1 OHM; 1%; 75PPM; 3W; METAL FILM 291R1110K RESISTOR; 0402; 10K; 1%; 100PPM; 0.0625W; THICK FILM 301R15 6.04K RESISTOR; 0603; 6.04K; 1%; 100PPM; 0.10W; THICK FILM 311R16 3.92K RESISTOR, 0603, 3.92K OHM, 0.1%, 25PPM, 0.10W, THICKFILM 321R1739.2K RESISTOR; 0603; 39.2K; 1%; 100PPM; 0.10W; THICK FILM 331R18332RESISTOR; 0603; 332 OHM; 1%; 100PPM; 0.10W; THICKFILM341R19102K RESISTOR; 0603; 102K OHM; 1%; 100PPM; 0.10W; THICKFILM 351R20 1.5K RESISTOR; 0603; 1.5K; 1%; 100PPM; 0.10W; THICK FILM 362R24,R25137RESISTOR; 0805; 137 OHM; 1%; 100PPM; 0.125W; THICKFILM371R29120K RESISTOR, 0603, 120K OHM, 1%, 100PPM, 0.10W, THICKFILM 381R310RESISTOR; 0603; 0 OHM; 5%; JUMPER; 0.10W; THICK FILM 391R3213K RESISTOR, 0603, 13KOHMS, 1%, 100PPM, 0.1W, THICKFILM401RP1KRESISTOR; ARRAY; 0402; 1K OHM; 5%; 200PPM; 0.063W;THICK FILM 4110SU1-SU10STC02SYANSULLINS ELECTRONICSCORP.STC02SYANTEST POINT; JUMPER; STR; TOTAL LENGTH=0.256IN; BLACK; INSULATION=PBT CONTACT=PHOSPHOR BRONZE;COPPER PLATED TIN OVERALL 421U1MAX5394LATA+MAXIM MAX5394LATA+IC; DPOT; SINGLE; 256-TAP VOLATILE; SPI; LOW-VOLTAGE TAPER DIGITAL POTENTIOMETER; TDFN8-EP 2MMX2MM 431U2ICM7556ISD+MAXIM ICM7556ISD+IC; TIMR; GENERAL PURPOSE TIMER; NSOIC14 150MIL 441U3MAX14871EUE+MAXIMMAX14871EUE+IC; DRV; 12V FULL BRIDGE DC MOTOR DRIVER; TSSOP16-EP 451U4MAX4704EGC+MAXIM MAX4704EGC+IC; AMUX; LOW-VOLTAGE; 60OHMS; 4:1 ANALOGMULTIPLEXER IN QFN; QFN12-EP 3X3461U5MAX15006AATT+MAXIM MAX15006AATT+IC; VREG; ULTRA-LOW QUIESCENT-CURRENT LINEARREGULATOR; TDFN6-EP 3X3471U7MAX8880ETT+MAXIM MAX8880ETT+IC; VREG; 12V; ULTRA-LOW-IQ; LOW-DROPOUT LINEARREGULATOR WITH POK; TDFN6-EP 3X3481U8FT232RL FUTURE TECHNOLOGY DEVICES INTLLTD.FT232RL IC; INFC; USB UART INTERFACE; SSOP28491U9STM32F103RET6STMICROELECTRONICS STM32F103RET6IC; MMRY; HIGH-DENSITY PERFORMANCE LINE ARM-BASED 32-BIT MCU WITH 512KB FLASH; 11 TIMERS; 3ADC; 13 COMMUNICATION INTERFACE; LQFP64 10X10501U10MAX14585AEVB+MAXIM MAX14585AEVB+IC; ASW; HI-SPEED USB AND AUDIO SWITCHES WITHNEGATIVE SIGNAL CAPABILITY AND HIGH-VOLATGE-TOLERABLE VBUS DETECTION; UTQFN10 1.4X1.8511U11NC7SZ125M5XFAIRCHILDSEMICONDUCTOR NC7SZ125M5XIIC; BUF; TINYLOGIC UHS BUFFER WITH THREE-STATEOUTPUT; SOT23-5521VDD5010?N/A TESTPOINT WITH 1.80MM HOLE DIA, RED, MULTIPURPOSE; NOT FOR COLD TEST531Y1HCM49-8.000MABJ-UT CITIZEN8MHZCRYSTAL; SMT ; AT-CUT CRYSTAL UNIT; 18PF; 8MHZ; +/-30PPM; +/-30PPM541 EPCB14871 MAXIM PCB PCB: EPCB14871 TOTAL114NOT INSERT(DNI)ITEM QTY REF DES MFG PART #MANUFACTURER VALUE DESCRIPTION11P5PEC10SAANSULLINSELECTRONICSCORP.PEC10SAANCONNECTOR; MALE; THROUGH HOLE; BREAKAWAY;STRAIGHT; 10PINS29P7,P9,P12-P14,PC0,PC1,PC6,PC7PEC01SAANSULLINSELECTRONICSCORP PEC01SAANCONNECTOR; MALE; THROUGH HOLE; BREAKAWAY;STRAIGHT; 1PIN33R3,R5,R8N/A N/A OPEN PACKAGE OUTLINE 0603 RESISTOR - EVKIT TOTAL13。

GETTING STARTED GUIDENI PXIe-4080/4081/40821.8 MS/s Digital MultimeterNote Before you begin, install and configure your chassis and controller.This document explains how to install, configure, and test the NI 4080/4081/4082. TheNI 4080/4081/4082 is a digital multimeter that ships with NI-DMM, which you use to program the device.To access NI 4080/4081/4082 documentation, navigate to Start»All Programs»National Instruments»NI-DMM Documentation.Caution The protection provided by this device may be impaired if the device isused in a manner not specified in this document.ContentsElectromagnetic Compatibility Guidelines (2)Verifying the System Requirements (2)Unpacking the Kit (2)Preparing the Environment (3)Safety (3)Kit Contents (4)Other Equipment (4)Installing the Software (4)Installing the NI 4080/4081/4082 (5)Hardware Front Panel Connectors (6)Connecting Signals (7)Requirements for Cables and Probes (10)Configuring the NI 4080/4081/4082 in MAX (11)Programming the NI 4080/4081/4082 (11)NI-DMM Examples (13)Troubleshooting (14)What Should I Do if the NI 4080/4081/4082 Doesn't Appear in MAX? (14)What Should I Do if the Module Fails the Self-Test? (15)Where to Go Next (15)Worldwide Support and Services (15)Electromagnetic Compatibility GuidelinesThis product was tested and complies with the regulatory requirements and limits for electromagnetic compatibility (EMC) stated in the product specifications. These requirements and limits provide reasonable protection against harmful interference when the product is operated in the intended operational electromagnetic environment.This product is intended for use in industrial locations. However, harmful interference may occur in some installations, when the product is connected to a peripheral device or test object, or if the product is used in residential or commercial areas. To minimize interference with radio and television reception and prevent unacceptable performance degradation, install and use this product in strict accordance with the instructions in the product documentation. Furthermore, any changes or modifications to the product not expressly approved by National Instruments could void your authority to operate it under your local regulatory rules.Verifying the System RequirementsTo use the NI 4080/4081/4082, your system must meet certain requirements. For more information about minimum system requirements, recommended system, and supported application development environments (ADEs), refer to the readme, which is available on the software media or online at /updates.Unpacking the KitCaution To prevent electrostatic discharge (ESD) from damaging the device,ground yourself using a grounding strap or by holding a grounded object, such asyour computer chassis.1.Touch the antistatic package to a metal part of the computer chassis.2.Remove the device from the package and inspect the device for loose components or anyother sign of damage.Caution Never touch the exposed pins of connectors.Note Do not install a device if it appears damaged in any way.3.Unpack any other items and documentation from the kit.Store the device in the antistatic package when the device is not in use.2| | NI PXIe-4080/4081/4082 Getting Started GuidePreparing the EnvironmentEnsure that the environment you are using the NI 4080/4081/4082 in meets the following specifications.Operating EnvironmentAmbient temperature range0 °C to 55 °C (Tested in accordance withIEC 60068-2-1 and IEC 60068-2-2. MeetsMIL-PRF-28800F Class 3 low temperaturelimit and MIL-PRF-28800F Class 2 hightemperature limit.)Relative humidity range10% to 90%, noncondensing (Tested inaccordance with IEC 60068-2-56.)Storage ambient temperature range-40 °C to 70 °C (Tested in accordancewith IEC 60068-2-1 and IEC 60068-2-2.) Maximum altitude2,000 m (800 mbar) (at 25 °C ambienttemperature)Pollution Degree2Indoor use only.Note Refer to the device specifications on /manuals for completespecifications.SafetyCaution Always refer to the specifications document for your device beforeconnecting signals. Failure to observe the specified maximum signal ratings cancause shock, a fire hazard, or damage to the devices connected to theNI 4080/4081/4082. NI is not liable for any damage or injuries resulting fromincorrect signal connections.NI PXIe-4080/4081/4082 Getting Started Guide| © National Instruments| 3Kit ContentsFigure 1.NI 4080/4081/4082 Kit Contents1.NI PXIe-4080/4081/4082 Device2.Test probes3.Driver Software DVD4.NI PXIe-4080/4081/4082 Getting Started Guide (this document)5.Maintain Forced-Air Cooling Note to Users Other EquipmentThere are several required items not included in your device kit that you need to install or operate the NI 4080/4081/4082.•1/8 in. flathead screwdriver• A PXI Express chassis with a controller and the chassis documentation Installing the SoftwareYou must be an Administrator to install NI software on your computer.1.Install an ADE, such as LabVIEW or LabWindows ™/CVI ™.2.Insert the driver software media into your computer. The installer should open automatically.If the installation window does not appear, navigate to the drive, double-click it, and double-click autorun.exe .3.Follow the instructions in the installation prompts.Note Windows users may see access and security messages duringinstallation. Accept the prompts to complete the installation.4 | | NI PXIe-4080/4081/4082 Getting Started Guide4.When the installer completes, select Restart in the dialog box that prompts you to restart,shut down, or restart later.Installing the NI 4080/4081/4082Caution To prevent damage to the NI 4080/4081/4082 caused by ESD orcontamination, handle the module using the edges or the metal bracket.1.Ensure the AC power source is connected to the chassis before installing the module.The AC power cord grounds the chassis and protects it from electrical damage while you install the module.2.Power off the chassis.3.Inspect the slot pins on the chassis backplane for any bends or damage prior toinstallation. Do not install a module if the backplane is damaged.4.Remove the black plastic covers from all the captive screws on the module front panel.5.Identify a supported slot in the chassis. The following figure shows the symbols thatindicate the slot types.Figure 2. Chassis Compatibility Symbols1.PXI Express System Controller Slot2.PXI Peripheral Slot3.PXI Express Hybrid Peripheral Slot4.PXI Express System Timing Slot5.PXI Express Peripheral SlotNI 4080/4081/4082 modules can be placed in PXI Express peripheral slots, PXI Express hybrid peripheral slots, or PXI Express system timing slots.6.Touch any metal part of the chassis to discharge static electricity.7.Ensure that the ejector handle is in the downward (unlatched) position.8.Place the module edges into the module guides at the top and bottom of the chassis. Slidethe module into the slot until it is fully inserted.NI PXIe-4080/4081/4082 Getting Started Guide| © National Instruments| 5Figure 3. Module Installation1.Chassis2.Hardware Module3.Ejector Handle in Downward (Unlatched) Positiontch the module in place by pulling up on the ejector handle.10.Secure the module front panel to the chassis using the front-panel mounting screws.Note Tightening the top and bottom mounting screws increases mechanical stability and also electrically connects the front panel to the chassis, which canimprove the signal quality and electromagnetic performance.11.Cover all empty slots using EMC filler panels or fill using slot blockers to maximizecooling air flow, depending on your application.12.Power on the chassis.Hardware Front Panel ConnectorsRefer to the following figure for the NI 4080/4081/4082 front panels. The front panels have four shrouded banana plug connectors.6 | | NI PXIe-4080/4081/4082 Getting Started GuideConnecting SignalsThe following figures show how to connect signals to the DMM front panel connectors for common measurements.For more information about these common measurements, refer to the NI Digital Multimeters Help at /manuals .Caution Always refer to the device specifications before connecting signals.Failure to observe the specified maximum signal ratings can cause shock, a fireNI PXIe-4080/4081/4082 Getting Started Guide | © National Instruments | 7hazard, or damage to the devices connected to the DMM. NI is not liable for anydamage or injuries resulting from incorrect signal connections.Figure 4. DC and AC VoltageorFigure 5. DC and AC Current8| | NI PXIe-4080/4081/4082 Getting Started GuideFigure 6. 2-Wire and 4-Wire ResistanceNote4-wire resistance measurements use both pairs of terminals. Use the configuration to measure low resistances accurately by eliminating the effects of lead resistance.Figure 7. Capacitance and InductanceNI PXIe-4080/4081/4082 Getting Started Guide| © National Instruments| 9Figure 8. Voltage Drop Across a DiodeRequirements for Cables and ProbesThe DMM shipping kit contains a pair of test probes with safety banana plugs. These probesmeet international safety requirements, including UL 3111 and IEC-1010-1, for the full rangeof applications supported by the DMM.Caution Before using any probes or accessories, ensure that they meet applicablesafety requirements for the signal levels you may encounter.Connect the test probes to the banana plug connectors on the DMM front panel using safetybanana plugs. The shrouds around the banana plugs prevent you from contacting potentiallyhazardous voltages connected to the test probes. You can also connect the cable to standard,unshrouded banana plug probes or accessories. Use unshrouded probes or accessories onlywhen the voltages are less than 30 Vrms and 42 Vpk, or 60 VDC.Caution (NI 4081 users) To prevent possible safety hazards, the maximum voltagebetween any of the inputs and the ground of the PXI Express chassis is 500 VDC or500 Vrms (sine wave), except between the HI terminal and ground, where themaximum voltage is 1,000 VDC or700 Vrms (sine wave). The maximum current theNI 4081 can measure through the current inputs is ±3 ADC or 3 Arms.Caution (NI 4080/4082 users) To prevent possible safety hazards, the maximumvoltage between any of the inputs and the ground of the computer is 300 VDC or300 Vrms. The maximum current the NI 4080/4082 can measure through the currentinputs is ±1 ADC or 1 Arms.10 | | NI PXIe-4080/4081/4082 Getting Started GuideConfiguring the NI 4080/4081/4082 in MAXUse Measurement & Automation Explorer (MAX) to configure your NI hardware. MAX informs other programs about which NI hardware products are in the system and how they are configured. MAX is automatically installed with NI-DMM.unch MAX.2.In the configuration tree, expand Devices and Interfaces to see the list of installed NIhardware.Installed modules appear under the name of their associated chassis.3.Expand your Chassis tree item.MAX lists all modules installed in the chassis. Your default names may vary.Note If you do not see your module listed, press <F5> to refresh the list ofinstalled modules. If the module is still not listed, power off the system, ensurethe module is correctly installed, and restart.4.Record the identifier MAX assigns to the hardware. Use this identifier whenprogramming the NI 4080/4081/4082.5.Self-test the hardware by selecting the item in the configuration tree and clicking Self-Test in the MAX toolbar.The MAX self-test performs a basic verification of hardware resources.Programming the NI 4080/4081/4082You can acquire data interactively using the NI-DMM Soft Front Panel (SFP), or you can use the NI-DMM instrument driver to program your device in the supported ADE of your choice.NI PXIe-4080/4081/4082 Getting Started Guide| © National Instruments| 11Table 1. NI-DMM Programming Options12| | NI PXIe-4080/4081/4082 Getting Started GuideTable 1. NI-DMM Programming Options (Continued)NI-DMM ExamplesThe NI Example Finder is a utility available for some ADEs that organizes examples into categories and allows you to easily browse and search installed examples. You can see descriptions and compatible hardware models for each example, or see all the examples compatible with one particular hardware model.To locate examples, refer to the following table.NI PXIe-4080/4081/4082 Getting Started Guide| © National Instruments| 13Table 2. Locating NI-DMM ExamplesT roubleshootingIf an issue persists after you complete a troubleshooting procedure, contact NI technical support or visit /support.What Should I Do if the NI 4080/4081/4082 Doesn't Appear in MAX?1.In the MAX configuration tree, expand Devices and Interfaces.2.Expand the Chassis tree to see the list of installed hardware, and press <F5> to refreshthe list.3.If the module is still not listed, power off the system, ensure that all hardware is correctlyinstalled, and restart the system.4.Navigate to the Device Manager.Operating System DescriptionWindows 7Select Start»Control Panel»Device Manager.5.If you are using a PXI or PXI Express controller, verify that a National Instrumentsentry appears in the System Devices list. Reinstall NI-DMM and the module if errorconditions appear in the list. If you are using an MXI controller, right-click PCI-to-PCI Bridge, and select Properties from the shortcut menu to verify that the bridge is enabled. 14| | NI PXIe-4080/4081/4082 Getting Started GuideWhat Should I Do if the Module Fails the Self-T est?1.Restart the system.unch MAX, and perform the self-test again.3.Power off the chassis.4.Reinstall the failed module in a different slot.5.Power on the chassis.6.Perform the self-test again.Where to Go NextRefer to the following figure for information about other product tasks and associated resources for those tasks.Worldwide Support and ServicesThe NI website is your complete resource for technical support. At /support, you have access to everything from troubleshooting and application development self-help resources to email and phone assistance from NI Application Engineers.NI PXIe-4080/4081/4082 Getting Started Guide| © National Instruments| 15Visit /services for NI Factory Installation Services, repairs, extended warranty, and other services.Visit /register to register your NI product. Product registration facilitates technical support and ensures that you receive important information updates from NI.A Declaration of Conformity (DoC) is our claim of compliance with the Council of the European Communities using the manufacturer’s declaration of conformity. This system affords the user protection for electromagnetic compatibility (EMC) and product safety. You can obtain the DoC for your product by visiting /certification. If your product supports calibration, you can obtain the calibration certificate for your product at /calibration.NI corporate headquarters is located at 11500 North Mopac Expressway, Austin, Texas, 78759-3504. NI also has offices located around the world. For telephone support in the United States, create your service request at /support or dial 1 866 ASK MYNI (275 6964). For telephone support outside the United States, visit the Worldwide Offices section of / niglobal to access the branch office websites, which provide up-to-date contact information, support phone numbers, email addresses, and current events.Refer to the NI Trademarks and Logo Guidelines at /trademarks for information on NI trademarks. Other product and company names mentioned herein are trademarks or trade names of their respective companies. For patents covering NI products/technology, refer to the appropriate location: Help»Patents in your software, the patents.txt file on your media, or the National Instruments Patent Notice at /patents. Y ou can find information about end-user license agreements (EULAs) and third-party legal notices in the readme file for your NI product. Refer to the Export Compliance Information at /legal/export-compliance for the NI global trade compliance policy and how to obtain relevant HTS codes, ECCNs, and other import/export data. NI MAKES NO EXPRESS OR IMPLIED WARRANTIES AS TO THE ACCURACY OF THE INFORMA TION CONTAINED HEREIN AND SHALL NOT BE LIABLE FOR ANY ERRORS. U.S. Government Customers: The data contained in this manual was developed at private expense and is subject to the applicable limited rights and restricted data rights as set forth in FAR 52.227-14, DFAR 252.227-7014, and DFAR 252.227-7015.© 2015—2016 National Instruments. All rights reserved.。

General DescriptionThe MAX2649 evaluation kit (EV kit) simplifies evalua-tion of the MAX2649. The EV kit allows the evaluation of the L NA without requiring additional support circuitry.The signal input and output use SMA connectors to simplify the connection of RF test equipment.The MAX2649 EV kit is assembled with an associated IC and incorporates input and output matching compo-nents optimized for RF frequencies from 5150MHz to 5350MHz. For operation outside this range, refer to the MAX2649 data sheet.Featureso +2.7V to +3.6V Single-Supply Operation o 50ΩSMA Inputs and Outputs on RF Ports for Easy Testing o All Matching Components Included o Fully Assembled and TestedQuick StartThe MAX2649 EV kit is fully assembled and factory test-ed. Follow the instructions in the Connections and Setup section for proper device evaluation.Test Equipment RequiredTable 1 lists the required test equipment to verify the MAX2649 operation. It is intended as a guide only, and some substitutions are possible.Connections and SetupThis section provides a step-by-step guide to operate and test the device’s functions. Do not turn on DC power or RF signal generators until all connections are made.Testing the Supply Current1)Connect a DC supply set to +3.0V (through anammeter if desired) to the VCC (J3) and GND (J4)terminals on the EV kit. If available, set the current limit to 30mA. Do not turn on the supply.Evaluates: MAX2649MAX2649 Evaluation Kit________________________________________________________________Maxim Integrated Products119-2579; Rev 0; 9/02For pricing, delivery, and ordering information,please contact Maxim/Dallas Direct!at 1-888-629-4642, or visit Maxim’s website at .Ordering InformationUCSP is a trademark of Maxim Integrated Products, Inc.E v a l u a t e s : M A X 26492)Connect VCC to the shutdown test port (TP1).3)Turn on the DC supply; the supply current shouldread approximately 14mA. 4)To test the shutdown current, repeat Steps 1, 2, and3 with shutdown connected to GND.Testing the Power Gain1)Connect a DC supply set to +3.0V (through anammeter if desired) to the VCC and GND terminals on the EV kit. If available, set the current limit to 30mA. Do not turn on the supply.2)Gain can be determined with a network analyzer.This has the advantage of displaying gain over a swept frequency band, in addition to displaying input and output return loss. Refer to the network analyzer manufacturer ’s user manual for setup details.3)(Optional) Connect one RF signal generator to theRFIN SMA connector. Do not turn on the generator ’s output. Set the generator to an output frequency of 5250MHz, and set the generator power level to -30dBm. 4)(Optional) Connect the spectrum analyzer to theRFOUT SMA connector. Set the spectrum analyzer to a center frequency of 5250MHz and a total span of 20MHz.5)(Optional) Turn on the DC supply, and then activatethe RF generator ’s output. A 5250MHz signal shown on the spectrum analyzer display should indicate a magnitude of approximately -15dBm. Account for cable losses (between 0.5dB and 2dB) and circuit board losses (approximately 0.5dB) when comput-ing gain.Testing the Noise FigureNoise-figure measurements on low-noise devices such as the MAX2649 are extremely sensitive to lab setup, board losses, and parasitics. There are many techniques and precautions for measuring a low noise-figure device.Detailed explanation of these items goes beyond the scope of this document. For more information on how to perform this level of noise-figure measurement, refer to Agilent Technologies Application Note 57-2, Noise Figure Measurement Accuracy .LayoutThe EV kit ’s PC board can serve as a guide for laying out a board using the MAX2649.Design the layout as compact as possible to minimize board parasitics. Install capacitors as close as possible to the IC supply-voltage pin. Place the ground end of these capacitors near the IC GND pins to provide a low-impedance return path for the signal current.Connect multiple vias from the ground plane as close as possible to the ground pins. When using a UCSP package, round or square pads are permissible. For the power supplies, a star topology works well to isolate different sections of the device. Each VCC node has its own path to a central VCC. Place decoupling capacitors that provide low impedance at the RF frequency of interest close to all VCC connections. The central VCC should have a large decoupling capacitor as well.For the best gain and noise performance, use high-Q (40) components for the LNA input-matching circuit.MAX2649 Evaluation Kit 2_______________________________________________________________________________________Figure 1. MAX2649 EV Kit SchematicEvaluates: MAX2649MAX2649 Evaluation Kit_______________________________________________________________________________________3Figure 2. MAX2649 EV Kit Component Placement Guide—Component SideE v a l u a t e s : M A X 2649MAX2649 Evaluation Kit Maxim cannot assume responsibility for use of any circuitry other than circuitry entirely embodied in a Maxim product. No circuit patent licenses are implied. Maxim reserves the right to change the circuitry and specifications without notice at any time.4_____________________Maxim Integrated Products, 120 San Gabriel Drive, Sunnyvale, CA 94086 408-737-7600©2002 Maxim Integrated ProductsPrinted USAis a registered trademark of Maxim Integrated Products.Figure 3. MAX2649 EV Kit PC Board Layout—Inner Layer 2Figure 4. MAX2649 EV Kit PC Board Layout—Inner Layer 3Figure 5. MAX2649 EV Kit PC Board Layout—Component SideFigure 6. MAX2649 EV Kit PC Board Layout—Solder Side。

MAX4080高精度单向电流检测放大器电路MAX4080高精度单向电流检测放大器电路检流放大器在放大微弱的差分电压的同时能够抑制输入共模电压,该功能类似于传统的差分放大器,但两者有一个关键区别:对于检流放大器而言,所允许的输入共模电压范围可以超出电源电压(VCC)。
例如,当MAX4080 检流放大器工作在VCC = 5V 时,能够承受76V 的输入共模电压。
采用独立的放大器架构,电流检测放大器不会受电阻不匹配造成的共模抑制(CMRR)的影响。
MAX4080 具有100dB (最小值)的直流CMRR,而基于传统运放的差分放大器则受CMRR 限制,其有效输入VOS 通过信号链路是被放大。
通过校准提高精度MAX4080 检流放大器具有精密的输入失调电压(VOS),25°C 时最大值为±0.6mV,在整个-40°C 至+125°C 温度范围内,最大值为±1.2mV。
但是,许多应用需要更高的电流测量精度,因此需要对输入VOS 做进一步校准。
这种校准通过在生产过程中测量VOS 并将结果存储在固件中实现。
利用所存储的数据,当设备在现场投入实际使用时,可以在数字域调整VOS。
为便于生产,校准的首选方案是:在负载电流为零(零输入差分电压)时测量VOS。
可以测量输出VOS 并在以后的测量数据中减去该电压。
不幸的是这种方法存在一个缺点,由于VOL (最低输出电压)和输入VOS 相互影响,输出电压可能无法精确地反映输入VOS。
所有单电源供电放大器均存在这一问题。
以增益为20 的MAX4080T 为例,并假设输入VOS 为零,此时放大器输出的测量值应该为零。
而实际情况是:即使在零输入差分电压下,放大器也。

MAX38886EVKIT#Evaluates: MAX38886MAX38886 Evaluation Kit 319-100532; Rev 0; 5/20Ordering Information appears at end of data sheet.General DescriptionThe MAX38886 evaluation kit (EV kit) evaluates the MAX38886 IC. The MAX38886 is a super cap backup regulator designed to transfer power between a super cap and a system supply rail. When the main battery is present and above the minimum system supply voltage, the regulator charges the super cap at up to a 500mA rate. Once the super cap is charged, the circuit draws only 3μA of current while it maintains the super cap in its ready state. When the main battery is removed, the regulator prevents the system from dropping below the minimum operating voltage, discharging the super cap at up to a 2.5A peak inductor current. Multiple MAX38886 ICs can be connected in parallel for higher current applications. The MAX38886 is externally programmable for mini-mum and maximum super cap voltage, minimum system voltage, and maximum charge and discharge currents. The internal DC-DC converter requires only a 1μH induc -tor and a 22μF capacitor.Features● 2.99V to 3.36V System Output Voltage Range ●0.5V to 2.71V Super Cap Voltage Range ● 2.5A Peak Discharge Current●Resistor-Adjustable Voltage and Current Thresholds ●Proven 2-Layer, 2oz Copper PCB Layout ●Compact Solution Size ●Fully Assembled and TestedQuick StartRequired Equipment●MAX38886 EV kit ●5V, 3A DC power supply ●One digital multimeter (DMM)ProcedureThe EV kit is fully assembled and tested. Use the follow-ing steps to verify board operation:Caution: Do not turn on power supply until all con-nections are completed.1) Verify that a shunt is installed onto pins 1 and 2 andjumper JU1 (EV kit enabled).2) Verify that jumper JU2 is opened (No load is connect-ed across VSYS and PGND).3) Set the power supply output to 3.4V, and disable thepower supply.4) Connect the power supply between the VSYS andPGND terminal posts.5) Connect the DMM between the VSC and PGNDterminal posts.6) Enable the power supply and verify that the super capvoltage at VSC is ramping up and stops at about 2.7V.7) Disable and disconnect the power supply from theVSYS and PGND terminal posts.8) Verify that VSYS drops to about 3V and VSC dropsto about 2.5V.9) Install jumper JU2. This connects a 51Ω load acrossVSYS and PGND.10) Verify that VSYS remains at 3V while VSC is rampingdown toward 0.5V.11) Verify that VSYS is 0V when VSC drops below 0.5V.FILEDESCRIPTION MAX38886 EV BOM EV Kit Bill of MaterialMAX38886 EV PCB Layout EV Kit Layout MAX38886 EV SchematicEV Kit SchematicMAX38886 EV Kit FilesClick here for production status of specific part numbers.Evaluates: MAX38886MAX38886 Evaluation Kit Detailed Description of HardwareThe MAX38886 EV kit provides a flexible circuit to evalu-ate the super cap backup regulator. External components allow a wide range of system and super cap voltages as well as charging and discharging currents.ENThe MAX38886 EV kit provides a jumper (JU1) to enable or disable the MAX38886. See Table 1 for JU1 jumper settings.VSYS LoadThe MAX38886 EV kit provides a jumper (JU2) to connect a 51Ω resistive load across VSYS and PGND to simulate a discharging scenario during test. See Table 2 for JU2 jumper settings.Charge ModeWhen the main battery is present and is above the mini-mum system supply voltage, the regulator charges the super cap at up to a 500mA rate. The MAX38886 EV kit minimum system supply voltage is set to 3.36V by resis-tors R5 and R6 with V FBS = 0.56V.Ready ModeOnce the super cap is charged to its maximum voltage of 2.7V, the circuit draws only 3μA of current while it main -tains the super cap in its ready state. The MAX38886 EV kit maximum super cap voltage is set to 2.7V by resistors R1 and R2 with V FBCH = 0.5V.Discharge ModeWhen the main battery is removed, the regulator discharges the super cap at up to a 2.5A peak inductor current to prevent the system from dropping below the minimum operating voltage. The MAX38886 EV kit mini-mum operating voltage is set to 2.99V by resistors R5 and R6 with V FBS = 0.5V.Charge/Discharge Current ConfigurationThe MAX38886 EV kit provides a resistor (R4) to config-ure the charge/discharge current rate for the super cap.The peak discharge current is set by connecting R4 between the ISET and GND pins.I DISCHARGE = 2.5A x (20kΩ/R4)The super cap charging current is internally set to 1/5 of the discharge current.I CHARGE = 0.5A x (20kΩ/R4)Choose a value of R4 between 20kΩ to 100kΩ to ensure accurate current compliance.*Default position*Default positionTable 1. EN (JU1)Table 2. VSYS Load (JU2)#Denotes RoHS compliance.Note: Indicate that you are using the MAX38886 when contact-ing these component suppliers.JU1SHUNT POSITIONDESCRIPTION1-2*Enabled. EN = VSYS 2-3Disabled. EN = PGND Not InstalledEnabled. EN = VSYS (through resistor R9)JU2SHUNT POSITIONDESCRIPTIONInstalled Test Mode: A 51Ω resistive load is connected across VSYS and PGND.Not Installed*Normal operating modeSUPPLIERWEBSITEAVX Kemet Murata/TOKO Wurth ElectronicsPART TYPE MAX38886EVKIT#EV KitComponent SuppliersOrdering InformationEvaluates: MAX38886MAX38886 Evaluation Kit MAX38886 EV Kit Bill of MaterialsITEM QTY REF DES MAXINV MFG PART #MANUFACTURERVALUEDESCRIPTION11C120-0022U-CA10GRM31CR71A226ME15MURATA 22UF CAPACITOR; SMT (1206); CERAMIC CHIP; 22UF; 10V; TOL=20%;TG=-55 DEGC TO +125 DEGC; TC=X7R21C220-00011-DA38SCCS30B116SRBA1AVX11FCAP; THROUGH HOLE-RADIAL LEAD; 11F; +30%/-10%; 2.7V;ALUMINUM-ELECTROLYTIC; NOTE:PURCHASE DIRECT FROM THE MANUFACTURER31C320-0022U-K7C0805C226M9PAC;GRM21BR60J226ME39;JMK212BJ226MG;CL21A226MQCLQN;885012107005KEMET;MURATA;TAIYO YUDEN;SAMSUNG EL;WURTH ELECTRONIK22UFCAPACITOR; SMT (0805); CERAMIC CHIP; 22UF; 6.3V; TOL=20%;TG=-55 DEGC TO +85 DEGC; TC=X5R41GND 02-TPMINI5001-005001KEYSTONEN/ATEST POINT; PIN DIA=0.1IN; TOTAL LENGTH=0.3IN;BOARD HOLE=0.04IN; BLACK; PHOSPHOR BRONZE WIRE SILVER PLATE FINISH; RECOMMENDED FOR BOARD THICKNESS=0.062IN; NOT FOR COLD TEST 51JU101-PEC03SAAN3P-21PEC03SAAN SULLINS PEC03SAAN CONNECTOR; MALE; THROUGH HOLE; BREAKAWAY;STRAIGHT; 3PINS61JU201-PEC02SAAN2P-21PEC02SAAN SULLINSPEC02SAAN CONNECTOR; MALE; THROUGH HOLE; BREAKAWAY;STRAIGHT; 2PINS71L150-0001U-0VF74437324010WURTH ELECTRONICS INC 1UH INDUCTOR; SMT; SHIELDED; 1UH; 20%; 5.00A 83LX, VSC, VSYS 01-131435300-10131-4353-00TEKTRONICS 131-4353-00CONNECTOR; WIREMOUNT; CIRCUIT BOARD TEST POINT MINIATURE PROBE; STRAIGHT; 4PINS 94PGND, TP1-TP301-10807400011P-80108-0740-001CINCH CONNECTIVITY SOLUTIONS JOHNSON 108-0740-001CONNECTOR; MALE; PANELMOUNT;BANANA JACK; STRAIGHT; 1PIN102R1, R580-0499K-24CRCW0603499KFK;ERJ-3EKF4993;RC0603FR-07499KL VISHAY DALE;PANASONIC;YAGEO 499K RESISTOR; 0603; 499K OHM; 1%; 100PPM;0.10W; THICK FILM111R280-002M2-24CRCW06032M20FK VISHAY DALE2.2MRESISTOR, 0603, 2.2M OHM, 1%, 100PPM,0.10W, THICK FILM121R480-0020K-24MCR03EZPFX2002;ERJ-3EKF2002;CR0603-FX-2002ELF;CRCW060320K0FK ROHM;PANASONIC;BOURNS;VISHAY DALE20K RESISTOR; 0603; 20K OHM; 1%; 100PPM;0.10W; THICK FILM131R680-02M49-24C RMCF0603FT2M49STACKPOLE ELECTRONICS INC. 2.49M RES; SMT (0603); 2.49M; 1%; +/-200PPM/DEGC; 0.10W 141R980-0001M-24CRCW06031M00FK;MCR03EZPFX1004VISHAY DALE;ROHM 1M RESISTOR, 0603, 1M OHM, 1%, 100PPM, 0.10W, THICK FILM153R10-R1280-0000R-AA6CRCW06030000Z0VISHAY DALE 0RESISTOR; 0603; 0 OHM; 0%; JUMPER; 0.1W; THICK FILM 161R1380-049R9-I8ERJ-14NF49R9PANASONIC 49.9RESISTOR; 1210; 49.9 OHM; 1%; 100PPM; 0.5W; THICK FILM 172SU1, SU202-JMPFS1100B-00S1100-B;SX1100-B;STC02SYAN KYCON;KYCON;SULLINS ELECTRONICS CORP.SX1100-BTEST POINT; JUMPER; STR; TOTAL LENGTH=0.24IN; BLACK;INSULATION=PBT;PHOSPHOR BRONZE CONTACT=GOLD PLATED 181U100-SAMPLE-01MAX38886ATD+MAXIMMAX38886ATD+EVKIT PART - IC; REG; 2.5V-5.0V; 0.5A/2.5A REVERSIBLEBUCK/BOOST REGULATOR FOR BACKUP POWER APPLICATIONS;TDFN14-EP; PACKAGE OUTLINE DRAWING: 21-0137;LAND PATTERN NUMBER: 90-0063; PACKAGE CODE: T1433+2CTOTAL 27Evaluates: MAX38886 MAX38886 Evaluation KitMAX38886 EV Kit Schematic DiagramEvaluates: MAX38886MAX38886 Evaluation Kit MAX38886 EV Kit Component Placement Guide—Top SilkscreenMAX38886 EV Kit PCB Layout—Top AssemblyMAX38886 EV Kit PCB Layout DiagramsEvaluates: MAX38886MAX38886 Evaluation Kit MAX38886 EV Kit PCB Layout—Bottom ViewMAX38886 EV Kit PCB Layout Diagrams (continued)Maxim Integrated cannot assume responsibility for use of any circuitry other than circuitry entirely embodied in a Maxim Integrated product. No circuit patent licenses are implied. Maxim Integrated reserves the right to change the circuitry and specifications without notice at any time.Evaluates: MAX38886MAX38886 Evaluation Kit REVISION NUMBER REVISION DATEDESCRIPTIONPAGESCHANGED5/20Initial release—Revision HistoryFor pricing, delivery, and ordering information, please visit Maxim Integrated’s online storefront at https:///en/storefront/storefront.html.MAX38886EVKIT#。

RTX4080公版PCB高清照,阉割明显;撼讯预热RX7900地狱犬大量空焊位前不久咱稍微介绍了一下RTX 4080的简单综合测试,要是聊性能的话,大约就是相当于RTX 3090的1.4倍性能。
不过这次咱要讲的是RTX 4080的硬件本体,以及这块PCB的扩展可能。
RTX 4080的PCB与4090相同,尺寸、散热器安装孔位也一致。
这就表示,合作伙伴要是打算偷懒直接把RTX 4090的散热套用过来也是完全没问题,这也能节省成本。
不过在非公版设计中,似乎还没有和公版用一致的V形异形PCB的。
PCB上焊接了8个GDDR6X显存模块,没有给到空焊位,这表示未来如果推出RTX 4080的升级款Ti或者SUPER,也依然是16G显存。
RTX 4080的显存是目前原生最快的GDDR6X显存,速度达到22.5Gbps。
但是,虽然RTX 4080和4090的PCB如出一辙,配置的硬件规格可就相去甚远了。
特别是在供电方面,公版4090给到了20+4的中上级别用料,而4080只有10+3的丐中丐大残用料:RTX 4080采用AD103-300 GPU核心,相比完整版AD103缩减了5%的CUDA内核。
现在国内外玩家对于4080和未来的4070Ti皆骂声不断,事实也正是如此,RTX 40系是次旗舰与旗舰差距最大的一次,硬件规格相差超过了40%:另一则消息,AMD的忠实伙伴撼讯Powercolor也开始预热RX 7900系列显卡。
之前撼讯有发过Devil红魔系列,红魔是撼讯一直以来的高端定位子系列,而Hellhound则是第一次采用高端定位GPU,上一代的地狱犬最高型号只到RX 6700XT。
新的RX 7900系列地狱犬显然采用了全新设计,同时保留了公版方面的双8Pin供电。
透过背板镂空以及散热鳍片,很容易看到散热器的三个蓝色LED风扇,这也是地狱犬的独特设计。
当然,如果喜欢无光也可以通过LED开关关闭灯光。
RX 7900系列将在12月13日正式上市,目前华硕、撼讯都已发布了自己的部分非公版设计。

安佳方案摄像头摄像头是现代社会中普遍应用的一种技术设备,它具有广泛的用途,包括监控、拍摄、录制等等。
在当今世界中,安佳方案摄像头已经成为一种趋势。
安佳方案摄像头具有高清画质、智能分析、便捷安装等特点,为用户带来便利和安全。
本文将介绍安佳方案摄像头的优势和功能,以及它在不同领域的应用。
一、安佳方案摄像头的优势安佳方案摄像头相对于传统摄像头来说具有诸多优势。
首先,它采用高清画质技术,能够提供清晰且细腻的图像,使用户能够更好地观察所监控的场景。
其次,安佳方案摄像头具备智能分析能力,可以识别人脸、车牌等重要特征,并进行自动识别、分析和报警。
这大大提高了监控的准确性和效率。
此外,安佳方案摄像头还拥有便捷安装的特点,用户只需简单地将其安装在所需监控的位置上,即可快速使用。
总之,安佳方案摄像头的优势在于高清画质、智能分析和便捷安装。
二、安佳方案摄像头的功能1. 高清录像功能:安佳方案摄像头支持高清录像,可以实时记录监控范围内的画面。
高清录像功能使得用户可以清晰地观察录像,更好地分析和判断事件发生的情况。
2. 智能分析功能:安佳方案摄像头内置智能分析算法,可以进行人脸识别、车牌识别等功能。
通过智能分析功能,用户可以更加准确地监控和管理,提高安全性和便捷性。
3. 远程监控功能:安佳方案摄像头支持远程监控,用户可以通过手机或电脑实时查看监控画面,无论身在何处都能掌握被监控区域的动态。
这为用户提供了更大的自由和便利。
4. 报警功能:安佳方案摄像头配备报警装置,可以在发生异常行为时立即报警。
这样,用户可以第一时间采取相应措施,及时应对突发情况。
三、安佳方案摄像头的应用领域1. 家庭安防:安佳方案摄像头可以安装在家庭的出入口、客厅、卧室等位置,对家庭进行全面的监控。
用户可以通过手机或电脑随时随地查看家庭情况,保障家人的安全。
2. 商业安防:安佳方案摄像头广泛应用于商场、银行、酒店等商业场所。
它可以监控人员进出、货物安全等重要信息,防范各种潜在风险。

安佳方案摄像头摄像头是一种通过光学传感器将图像转换为电子信号,并将其传输到显示设备上的设备。
在现代社会中,摄像头被广泛应用于各个领域,如安全监控、视频会议、电子教育等。
随着技术的不断进步和需求的增加,安佳公司提出了一种新型摄像头方案,旨在提供更高质量、更便捷的摄像和拍摄体验。
1. 技术特点新型安佳方案摄像头具有以下几个技术特点:1.1 高分辨率图像安佳方案摄像头采用先进的图像传感器和图像处理算法,能够提供高分辨率的图像输出。
用户在使用过程中,可以获得更清晰、更细腻的图像细节,使得拍摄和观看更为真实和逼真。
1.2 夜视功能该摄像头还配备了强大的夜视功能,能够在低光环境下获取清晰的图像。
无论是夜间安防监控还是低光照条件下的拍摄,安佳方案摄像头都能提供出色的拍摄效果。
1.3 广角拍摄安佳方案摄像头具备广角拍摄能力,能够在较小的空间内捕捉更多的场景。
用户在使用时,无需调整摄像头位置,就能够拍摄到更广阔的画面,提高了拍摄的便捷性和效率。
1.4 远程监控通过与智能手机或电脑等设备连接,安佳方案摄像头允许用户在远程进行实时监控。
用户可以通过手机应用或电脑软件,随时查看摄像头的图像,并能远程控制摄像头的各项功能,极大地方便了用户对监控区域的管理。
2. 应用场景安佳方案摄像头在多个领域有着广泛的应用,包括但不限于以下几个方面:2.1 家庭安防在家庭安防领域,安佳方案摄像头能够提供全方位的监控。
用户可以将摄像头安装在重要区域,如门口、客厅等,实时监控家庭安全状况,并在有异常情况时及时报警。
2.2 商业监控在商业场所,安佳方案摄像头可以用于监控店铺、仓库、停车场等区域,确保商业活动的安全。
同时,商家还可以通过摄像头对顾客行为进行分析,为店铺优化提供决策依据。
2.3 交通监控交通监控是摄像头应用的重要领域之一。
安佳方案摄像头可以用于交通路口的红绿灯控制、车流量统计等功能,以提高交通管理的效率和准确性。
2.4 教育领域在教育领域,安佳方案摄像头可用于学校的课堂教学和在线教育。
Evaluates: MAX4080/MAX4081MAX4080 Evaluation Kit________________________________________________________________Maxim Integrated Products 1For pricing, delivery, and ordering information, please contact Maxim Direct at 1-888-629-4642,or visit Maxim’s website at .19-3102; Rev 0; 12/07General DescriptionThe MAX4080 evaluation kit (EV kit) is a fully assembled and tested surface-mount printed-circuit board (PCB)that contains a MAX4080SAUA (8-pin µMAX ®) IC. The MAX4080 is a high-side, current-sense amplifier with an input common-mode voltage range that extends from 4.5V to 76V. The current-sense amplifier provides an analog voltage output proportional to the load current flowing through an external sense resistor.The EV kit can also be used to evaluate the MAX4081,which is a bidirectional version of the current-sense amplifier. The MAX4081’s single output pin continuously monitors the transition from charge to discharge and avoids the need for a separate polarity output pin. The MAX4081 requires an external reference to set the zero-current output level (V SENSE = 0V). Charging current is represented by an output voltage from V REF to V CC ,while discharge current is given from V REF to GND.All gain versions of the MAX4080 and MAX4081 are footprint-compatible and the MAX4080SAUA can easily be replaced by a MAX4080F AUA, MAX4080TAUA,MAX4081F AUA, MAX4081TAUA, or MAX4081SAUA.With a combination of three gain versions (5V/V, 20V/V,60V/V = F , T, S suffix) and a user-selectable, external sense resistor, the user can easily match the full-scale load current to the required output-voltage range.F or maximum versatility, these parts can operate with 76V input common-mode voltage at RS+ and RS- pins,independent of operating supply voltage (V CC ) used.These parts also allow a large differential voltage between RS+ and RS- pins for high reliability. High-side current monitoring does not interfere with the ground path of the load being measured, making the MAX4080/MAX4081 particularly useful in a wide range of high-voltage systems.Features♦Real-Time Current Monitoring♦Wide 4.5V to 76V Input Common-Mode Range Independent of Operating Supply Voltage ♦Bidirectional or Unidirectional I SENSE ♦±0.1% Full-Scale Accuracy ♦8-Pin µMAX Package ♦Fully Assembled and TestedOrdering InformationµMAX is a registered trademark of Maxim Integrated Products,Inc.E v a l u a t e s : M A X 4080/M A X 4081MAX4080 Evaluation Kit 2_______________________________________________________________________________________Quick StartRecommended EquipmentBefore beginning, the following equipment is needed:•One 12V, 1A power supply•One electronic load capable of sinking 1A •Two digital voltmeters (DVMs)ProcedureThe MAX4080 EV kit is fully assembled and tested.F ollow the steps below to verify board operation.Caution: Do not turn on the power supply or the electronic load until all connections are completed.1)MAX4081 only: Verify that a shunt is installed acrosspins 1-2 of jumper JU1.2)MAX4081 only: Verify that a shunt is installed acrosspins 1-2 of jumper JU2.3)Set the power supply to 12V and connect the posi-tive terminal to the VCC pad. Connect the ground of the power supply to the GND pad closest to the VCC pad.4)Connect the VCC pad and the VSENSE+ pad.5)Set the electronic load to sink 1A.6)Connect the electronic load’s positive terminal tothe VSENSE- pad. Connect the load’s ground to the GND pad closest to the VCC pad.7)Connect a voltmeter across the VSENSE+ andVSENSE- pads. (Note that this voltmeter measure-ment will not accurately reflect actual sense voltage across the sense resistor due to voltage drop in the trace and in the connectors. Accurate measurement of sense voltage across low-value sense resistors requires the use of 4-wire Kelvin-connected sense resistors. The EV kit board shows one example of good layout practice by which RS+ and RS- of the current-sense amplifier can connect to commonly available 2-wire sense resistors.)8)Connect the second voltmeter across the VOUTpad and the closest GND pad.9)Turn on the power supply.10)Turn on the electronic load.11)Verify that the first DVM reading is approximately100mV and the second DVM is approximately 6V.12)Adjust the electronic load current to between 1Aand 0A and verify that the reading of the second DVM is about 60 times the reading of the first DVM.Detailed DescriptionThe MAX4080 EV kit is a current-sense amplifier that measures the load current and provides an analog volt-age output. The full-scale V SENSE is set to 100mV. The full-scale I SENSE is set at 1A. They can be changed by replacing current-sense resistor R1 to another appropri-ate value.Applying the V CC Power Supply and theLoad Power SupplyThe EV kit is installed with a MAX4080SAUA, which has a gain of 60. The current-sense-resistor value is 0.1Ω.The V OUT is given by:where V SENSE is the sense voltage, I SENSE is the load current, and A V is the gain of the device.Note:Output voltage is internally clamped not to exceed 18V.Normal operating V CC , V SENSE+, and V SENSE-range is 4.5V to 76V.Measuring the Load CurrentThe load current is measured as a voltage drop (V SENSE ) across an external sense resistor. This volt-age is then amplified by the current-sense amplifier and presented at its OUT pin. Like all differential amplifiers,the output voltage has two components of error (an off-set error and a gain error). The offset error affects accu-racy of measurement at low currents and a gain error affects output accuracy at large currents—both errors affect accuracy of measurement at intermediate cur-rents. By minimizing both offset and gain errors, accu-rate measurements can be obtained from the MAX4080/MAX4081 over a wide dynamic range.V V A I OUT SENSE V SENSE =×=××0160.Component Supplierswhen contacting these component suppliers.The MAX4080 EV kit, which is assembled with the MAX4080SAUA, is designed with a full-scale sense voltage drop of 100mV. For a typical 1A full-scale load current, this results in the use of a 0.1Ωsense resistor on the MAX4080 EV kit using the following equation: For different full-scale sense voltage and full-scale load-current arrangements, the equation above can be used to determine the appropriate current-sense-resistor val-ues. Refer to Table 1. Typical Component Values in the MAX4080/MAX4081 IC data sheet for further guidance.Evaluating theMAX4080FAUA/MAX4080TAUA The MAX4080 EV kit can be used to evaluate other gain versions of the MAX4080 (5V/V, 20V/V, 60V/V = F, T, S suffix). Replace U1 with a different version of the MAX4080 and refer to Table 1. Typical Component Values in the MAX4080/MAX4081 IC data sheet for additional information.Evaluating the MAX4081 BidirectionalCurrent-Sense Amplifiers The MAX4080 EV kit can also be used to evaluate the MAX4081 bidirectional current-sense amplifiers. Replace U1 with a MAX4081SAUA, MAX4081TAUA, or MAX4081FAUA. The MAX4081 requires an external ref-erence to set the zero-current output level (V SENSE= 0V). The charging current is represented by an output voltage from V REF to V CC, while discharge current is given from V REF to GND. Measuring V OUT with respect to V REF(instead of GND) gives a ±output voltage.The V OUT reference level is controlled by REF1A and REF1B. V REF is defined as the average voltage of VREF1A and VREF1B. Connect REF1A and REF1B together to a low-noise, regulated voltage source to set the output reference level. In this mode, V OUT equals VREF1A when V SENSE equals zero.Alternatively, connect REF1B to ground and REF1A to a low-noise, regulated voltage source. In this case, the output reference level (V REF) is equal to VREF1A divid-ed by two. V OUT equals half of VREF1A when V SENSE equals zero.In either mode, the output swings above the reference voltage for positive current sensing (VRS+ > VRS-). The output swings below the reference voltage for negative current sensing (VRS+ < VRS-).Use jumpers JU1 and JU2 to set the V REF on the EV kit. See Table 1 for jumper settings and the corresponding V REFvalues.Evaluates: MAX4080/MAX4081MAX4080 Evaluation Kit_______________________________________________________________________________________3Figure 1. MAX4080 EV Kit SchematicE v a l u a t e s : M A X 4080/M A X 4081MAX4080 Evaluation Kit 4_______________________________________________________________________________________Component SideMaxim cannot assume responsibility for use of any circuitry other than circuitry entirely embodied in a Maxim product. No circuit patent licenses are implied. Maxim reserves the right to change the circuitry and specifications without notice at any time.Maxim Integrated Products, 120 San Gabriel Drive, Sunnyvale, CA 94086 408-737-7600 _____________________5©2007 Maxim Integrated Productsis a registered trademark of Maxim Integrated Products, Inc.Evaluates: MAX4080/MAX4081MAX4080 Evaluation Kit。