8.6 基于遗传算法摩擦模型参数辨识的PID控制
- 格式:ppt
- 大小:201.00 KB
- 文档页数:10
本科生毕业设计(论文)论文题目:基于遗传算法的PID参数优化毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日注意事项1.设计(论文)的内容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致谢9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
控制理论与应用Control Theory and Applications《自动化技术与应用》2004年第23卷第7期用遗传算法实现PID 参数整定万佑红1,李新华2(1.南京邮电学院电子工程系,江苏 南京 210003; 2.安徽大学电子工程系,安徽 合肥 230001)摘要:PI D 参数整定一直是控制领域中的重要研究问题。
本文在M AT LAB 平台上将遗传算法应用于PI D 参数的自动整定,算法实例仿真取得了良好的效果,为PI D 参数整定方法提供了一种新的尝试。
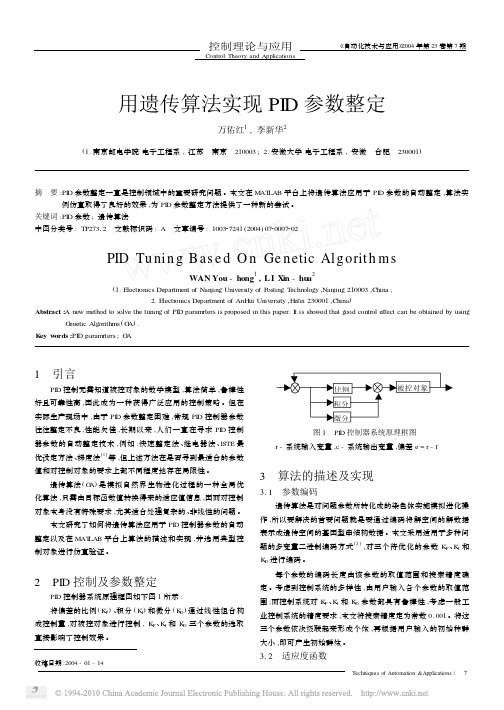
关键词:PI D 参数;遗传算法中图分类号:TP27312 文献标识码:A 文章编号:100327241(2004)0720007202PID Tu nin g Bas e d O n Ge netic Alg orit h m sWAN You -hong 1,LI Xin -hua 2(1.E lectronics Department of Nanjing University of P osting T echnology ,Nanjing 210003,China ;2.E lectronics Department of AnHui University ,Hefei 230001,China )Abstract :A new method to s olve the tuning of PI D paramrters is proposed in this paper.I t is showed that g ood control effect can be obtained by usingG enetic Alg orithms (G A ).K ey w ords :PI D paramrters ;G A1 引言PI D 控制无需知道被控对象的数学模型,算法简单,鲁棒性好且可靠性高,因此成为一种获得广泛应用的控制策略。
基于遗传算法的PID控制器参数优化基于遗传算法的PID控制器参数优化是一种智能化调节方法,通过遗传算法的优化过程,可以自动得到最佳的PID参数组合,并实现对控制系统的自动调节。
以下将详细介绍基于遗传算法的PID控制器参数优化的原理、步骤和应用情况。
一、基于遗传算法的PID控制器参数优化原理遗传算法是一种模拟自然选择和遗传的数学模型,通过模拟生物进化的过程,利用优胜劣汰的原则逐步优化求解问题。
在PID控制器参数优化中,可以将PID参数看作个体(染色体),通过遗传算法的选择、交叉和变异等操作,不断优化个体的适应度,最终得到最佳的PID参数组合。
二、基于遗传算法的PID控制器参数优化步骤(1)初始化种群:随机生成一组PID参数作为初始种群,设置种群大小和迭代次数。
(2)适应度函数定义:根据所需控制效果,定义适应度函数来评估每个个体的优劣程度。
(3)选择操作:根据适应度函数的值选择优秀的个体,采用轮盘赌等选择策略,将优秀的个体复制并加入下一代种群中。
(4)交叉操作:从选择的个体中,选取两个个体进行交叉操作,通过交叉操作生成新的个体,并加入下一代种群中。
(5)变异操作:对下一代种群中的一些个体进行变异操作,改变其染色体的一些位,以保持种群的多样性。
(6)重复上述步骤:迭代执行选择、交叉和变异操作,直到达到预定的迭代次数或找到满意的PID参数组合。
(7)输出最佳解:最终输出具有最佳适应度的PID参数组合,作为优化后的参数。
三、基于遗传算法的PID控制器参数优化应用情况(1)机械控制系统:如电机驱动、自动化装配线等,通过优化PID 参数可以提高系统的控制精度和动态性能。
(2)能源系统:如电力系统、风力发电等,通过优化PID参数可以实现能源的高效利用和稳定运行。
(3)化工过程控制:如温度控制、压力控制等,通过优化PID参数可以提高产品质量和生产效率。
(4)交通管理系统:如城市交通信号控制、车辆行驶控制等,通过优化PID参数可以实现交通流畅和事故减少。
收稿日期:2009-04-27作者简介:乔志杰(1983-),男,安徽固镇人,安徽电子信息职业技术学院,硕士,教师。
基于遗传算法优化的模糊PID 控制研究及其仿真乔志杰1,程翠翠2(1.安徽电子信息职业技术学院,安徽 蚌埠 233000;2.蚌埠机电工程学校,安徽 蚌埠 233000)摘 要:本文提出了一种基于遗传算法优化的模糊PI D 控制系统:采用遗传算法优化模糊控制中的隶属函数和控制规则,进一步完善了模糊PI D 控制器的性能,提高了系统的控制精度。
最后对优化后的模糊控制器进行了M atlab 仿真研究,仿真结果表明:经过优化后的控制器明显地改善了控制系统的动态性能,能使系统达到满意的控制效果,对进一步应用研究具有较大的参考价值。
关键词:MATLAB ;模糊PI D 控制;遗传算法;仿真中图分类号:TP273 文献标识码:A 文章编号:1672-9706(2009)03-0098-05R esearch on Opti m ization of Fuzzy PI D Control Basedon G enetic A lgorith m and Its Si m ulationQIAO Zhi -J ie 1,CHENG Cui -cui2(1.Anhui Vocational C ollege o f E lectronic&Infor m ation Technology,B engbu 233000,China;2.B engbu School of M echanical&E lectric E ng ineering,B engbu 233000,China )Abst ract :In th is paper ,a k i n d of opti m izati o n of fuzzy PI D con tro l syste m based on Genetic A lgorith m is discussed:The using o fGenetic A l g orith m to opti m ize the m e m bersh i p functi o n and contro l r u les o f fuzzy contro l syste m perfects the pr operties o f fuzzy PI D contro ller and i m proves the precisi o n o f control syste m.A t l a s,t theMATLAB si m ulati o n o f opti m ized fuzzy PI D contro l syste m is carried ou.t The result of si m u -lation ind i c ated that the opti m ized control syste m i m proves the dyna m ic pr operty .It can g i v e a good con -tro l perfor m ance and has a h i g h reference value for further applicati o ns .K ey w ords :MATLAB ;fuzzy PI D contro;l Genetic A l g orith m;si m u lati o n0 引言众所周知,模糊控制是当今控制领域中令人瞩目的新的控制方法和技术,它无需建模,只通过把专家的经验和控制策略总结成若干规则,采用简便、快速、灵活的手段,来完成那些用经典和现代控制难以实现的自动化和智能化的目标,因而在多个领域中得到越来越广泛的应用。

基于遗传算法的PID控制器参数优化遗传算法是一种模拟生物进化过程的智能算法,适用于解决优化问题。
在PID控制器设计中,参数的选择对控制系统的性能和稳定性有很大影响。
使用遗传算法对PID控制器参数进行优化,能够自动找到最优参数组合,提高系统的控制性能。
PID控制器由比例(P)、积分(I)、微分(D)三个部分组成,其输出是通过对误差的线性组合得到的。
参数的选择直接影响控制器的稳定性、动态响应和抗干扰能力。
传统的方法通常是通过试错法进行参数整定,这种方法的缺点是效率低、调试过程繁琐且容易出错。
遗传算法是一种模拟自然界进化过程的智能优化算法,其中每个个体代表一组可能的参数,通过适应度函数来衡量个体的适应度,并选择适应度较高的个体进行遗传和变异操作,最终找到适应度最优的个体。
将遗传算法应用于PID控制器参数优化的步骤如下:1.确定优化目标:通过设置适应度函数来度量控制系统的性能指标,如超调量、调整时间和稳定性。
2.初始化种群:随机生成一组初始参数作为初始种群,并利用适应度函数来评估每个个体的适应度。
3.选择操作:根据适应度选择一部分适应度较高的个体作为父代,通过选择操作进行选择。
4.交叉操作:将选中的父代进行交叉操作,生成新的子代个体。
5.变异操作:对子代进行变异操作,引入新的个体差异。
6.评估适应度:利用适应度函数评估新生成的子代个体的适应度。
7.判断终止条件:判断是否满足终止条件,如达到最大迭代次数或找到满足条件的解。
8.更新种群:根据选择、交叉和变异操作的结果,更新种群。
9.重复步骤3-8,直到满足终止条件。
10.输出最优解:输出适应度最好的个体参数作为PID控制器的优化参数。
使用遗传算法进行PID控制器参数优化有如下优点:1.自动化:遗传算法能够自动寻找最优参数组合,减少了人工试错的过程。
2.全局:遗传算法具有全局的能力,能够参数空间的各个角落,找到更好的解决方案。
3.鲁棒性:遗传算法能够处理多变量、多模态和不连续的问题,具有较好的鲁棒性。
基于遗传算法的模糊自抗扰PID双环直流调速系统摘要:本文将遗传算法与模糊控制相结合,针对工程上通常采用直流调速系统,详细分析双闭环调速系统的模糊自整定PID控制,设计了模糊控制器并对直流双闭环调速系统进行建模,分别对系统的电流环、转速环的动态性能、抗干扰性能进行仿真分析,最后,与传统PID控制进行比较,可见模糊自整定控制可以大大提高控制效果、增强抗扰性能、加快系统响应速度快,具有良好的动态性能。
Abstract:This paper combined the genetic algorithms and fuzzy control,made a detailed analysis of fuzzy self-tuning PID control of double-loop speed control system based on the DC speed control system commonly used for engineering,designed the fuzzy controller,conducted DC double-loop speed control system modeling,made the simulation analysis of the current loop of system,the dynamic performance of the speed loop and the anti-jamming performance respectively,and finally compared it with the traditional PID control,which showed that fuzzy self-tuning control could greatly improve the control performance,enhance the anti-interference performance and speed up the system response and had gooddynamic performance.关键词:遗传算法;模糊控制;双环控制Key words:genetic algorithm;fuzzy control;dual-loop control0 引言本文采用基于遗传算法的模糊自抗扰PID控制器对双环直流调速系统进行控制,通过转速电流双闭坏系统的仿真,验证其是否可以很好地克服负载变化和电网电压波动等扰动情况,特别是电网电压扰动点在电流环内,当电网电压波动时可以通过电流反馈及时得到抑制,而不会造成电机转速的波动,从而证明双闭环调速系统能有效提高系统对电网电压扰动的抗扰性能。
基于遗传算法的PID控制概述作者:张亚飞来源:《卷宗》2013年第08期摘要:基于PID控制应用的广泛性,本文简要阐述了遗传算法理论的关键思想及其在PID 控制中的应用策略,并用Matlab软件对一个控制实例进行了仿真研究。
关键词:PID控制;遗传算法;Matlab仿真0 引言PID控制作为最早实用化的控制算法已有70多年历史,现在仍然是控制系统中应用最为普遍的一种控制规律。
它所涉及的算法和控制结构简单,实际经验以及理论分析都表明,这种控制规律对许多工业过程进行控制时,一般都能得到较为满意的控制效果。
随着控制理论的发展,尤其是人工智能研究的日趋成熟,许多先进的算法理论逐渐被应用到传统的PID控制中,并取得了更为优越的控制效果。
本文就以传统PID控制和遗传算法理论为基础,简述了基于遗传算法整定的PID控制基本理论和方法。
1 PID控制通过将偏差的比例(Proportional)、积分(Integral)、微分(Derivative)进行线性组合构成控制量,对被控对象进行控制,这种控制方法叫做PID控制。
在自动控制发展的历程中,常规PID控制得到了广泛的应用,整个控制系统由常规PID控制器和被控对象组成,根据系统给定值r(t)与实际输出值y(t)存在的控制偏差e(t)=r(t)-y(t)组成控制规律。
PID控制器将偏差e(t)的比例-积分-微分通过线性组合构成控制量,对被控对象进行控制。
其基本控制规律为式中,Kp为比例增益,Ti为积分时间常数,Td为微分时间常数,u(t)为控制量,e (t)为偏差。
2 遗传算法基本操作遗传算法,简称GA(Genetic Algorithms),是由美国Michigan大学的Holland教授于上世纪六十年代率先提出的一种高效并行全局最优搜索方法。
遗传算法是模拟达尔文生物进化论的自然选择和孟德尔遗传学机理的生物进化过程的计算模型,它将“优胜劣汰,适者生存”的生物进化理论引入优化参数形成的编码串联群体中,按所选择的适配值函数通过遗传中的复制、交叉和变异对种群个体进行筛选,并保留适配值高的种群个体,组成新的群体。
基于遗传算法优化的模糊pid控制研究及其仿真随着工业生产自动化和精密控制的发展,PID控制器已成为控制系统中最常用的控制技术之一。
传统的PID控制方法具有一定的稳定性和可靠性,但也存在一定的缺陷,例如参数设置困难、优化效率低等问题。
为了解决这些问题,研究人员提出了基于遗传算法的模糊PID控制研究方法。
遗传算法是一种以自然选择为基础的模仿自然进化和模拟计算思想,由John Holland于1960年代提出,它能够自动调节参数并为优化问题提供有效解决方案。
它大大简化了传统PID控制中的参数设定和优化过程,使PID控制系统更加精确和可靠。
方法基于遗传算法的模糊PID控制研究方法,主要分为以下几个步骤:(1)首先,根据模糊控制的原理,为模糊PID控制器设定优化目标。
(2)确定遗传算法的迭代次数和基因池的大小。
(3)根据模糊逻辑和技术,使用遗传算法的特性建立一个模糊系统,利用遗传算法计算模糊系统参数。
(4)将计算出的参数应用到PID控制器中,进行系统仿真。
(5)根据仿真结果,对模糊系统参数进行调整,使系统性能更加稳定可靠。
结果和讨论通过基于遗传算法的模糊PID控制研究,可以得到较佳的控制系统参数,使系统稳定性和可靠性得到很大的提高。
仿真结果表明,基于遗传算法优化的模糊PID控制器在系统参数设置和稳定性方面有着良好的优势。
结论是,在工业生产自动化和精密控制中,基于遗传算法优化的模糊PID控制是一种有效的控制策略,它能够有效改善系统性能,提高系统稳定性和可靠性。
结论基于遗传算法优化的模糊PID控制是一种有效的控制策略,能够提高其稳定性和可靠性,从而有效改善系统性能。
但是,需要指出的是,以上研究主要集中在参数设计和优化上,而对系统动态和实时应用方面尚未有深入研究,仍有许多工作需要去完善。


![基于遗传算法的模糊PID控制器及其控制方法[发明专利]](https://img.taocdn.com/s1/m/e6dd9e7ee418964bcf84b9d528ea81c758f52e22.png)
(10)申请公布号 CN 102968055 A(43)申请公布日 2013.03.13C N 102968055 A*CN102968055A*(21)申请号 201210521099.0(22)申请日 2012.12.07G05B 11/42(2006.01)(71)申请人上海电机学院地址200240 上海市闵行区江川路690号(72)发明人王海军(74)专利代理机构上海思微知识产权代理事务所(普通合伙) 31237代理人郑玮(54)发明名称基于遗传算法的模糊PID 控制器及其控制方法(57)摘要本发明公开了一种基于遗传算法的模糊PID控制系统及控制方法,该方法包括如下步骤:利用模糊控制算法对被控对象进行控制,在线动态生成PID 控制器的三个参数;以及利用遗传算法选择合适的适应度函数,利用种群中每个个体的适应度值进行搜索,增加遗传算法的收敛速度,计算出最优解,以此对模糊控制所输出的三个基本参数进行进一步的优化,本发明可以在确保控制检测准确的基础上,提高控制系统的动态与静态性能。
(51)Int.Cl.权利要求书2页 说明书7页 附图3页(19)中华人民共和国国家知识产权局(12)发明专利申请权利要求书 2 页 说明书 7 页 附图 3 页1.一种基于遗传算法的模糊PID控制器,包括PID控制器、模糊控制模组,其特征在于:该模糊PID控制器还包括遗传算法优化模组,该模糊控制模组利用模糊控制算法实现对被控对象控制,在线动态生成该PID控制器的三个参数,该遗传算法优化模组在优化搜索中选择合适的适应度函数,利用种群中每个个体的适应度值进行搜索,增加遗传算法的收敛速度,计算出最优解,以此对该模糊控制模组所输出的三个参数进行进一步优化。
2.如权利要求1所述的基于遗传算法的模糊PID控制器,其特征在于:该模糊控制模组将被控量的精确值与设定值进行比较,得到误差,并计算出误差变化率,然后将误差和误差变化率分别量化模糊成模糊量,再由误差、误差变化率和模糊关系矩阵根据推理合成规则进行模糊决策,得到模糊控制量,作用于被控对象,如此循环下去,实现对被控对象的控制。

模糊控制具有能够适用于复杂工况等特性,在各个领域得到了广泛的应用[1]。
一个模糊控制系统的控制效果,在一定程度上取决于规则表的建立和隶属度函数的选取,选取得好会使控制系统适应复杂的工业过程[2]。
传统选取规则表的方式,大多是根据工业知识、专家经验等,但因为经验的差异性使得规则表和隶属度函数的选取大相径庭,难以推广,并且过程繁琐。
因此,模糊控制领域学者关注的重点一般都在如何对模糊规则和隶属度函数进行优化上。
Karr C L和Gentry E J早在1993年就进行了隶属度函数问题方面的研究,其主要的成果是采用SGA(简单遗传算法)对论域中语言变量的模糊集进行重新设定,构成了自适应控制系统[3]。
Buckley J J认为可以优先确定隶属度函数的形状,如矩形、三角形等,然后对构成这些形状的参数进行寻优[4]。
此外,Thrift P则是在固定隶属度函数的前提下,对整个模糊规则库进行寻优[5]。
屈文忠和邱阳针对多变量模糊控制系统,提出采用遗传算法来设计模糊规则,这种方法不但适合非常复杂的控制系统,同时也能提高模糊控制器的鲁棒性[6]。
张景元通过对遗传算法的改进,使得模糊控制系统能够在一定程度上实现规则表的自适应,并且控制效果较理想[7]。
董海鹰等的研究则侧重于基于多种群的变论域方面,也实现了模糊规则的自整定[8]。
以上研究成果的不局限性是在优化过程中分别对隶属度函数和模糊控制规则进行单独处理,没有考虑到二者之间存在的内在联系,割裂后的二者只能代表模糊控制器的一部分,因此上述方法通常只是做到了局部最优。
与上述研究不同的是,Homaifar A和McCormick E首次同时考虑隶属度函数和规则表[9],但是却没有考虑到在进化进程中以及初始设置时可能出现的规则相互矛盾的问题,并且在整个整定过程中同时有可能出现某些值域没有被覆盖的现象,导致产生失控点。
笔者结合现有的研究成果,兼顾隶属度函数和规则表,提出了一种新的寻优算法。
浅淡基于遗传算法的PID控制技术发表时间:2009-04-07T10:59:44.437Z 来源:《科海故事博览•科教创新》2009年第2期供稿作者:唐永环[导读] 主要阐述基于遗传算法的PID控制技术。
摘要:PID控制技术成熟,广泛应用于化工生产过程控制中,阐述PID控制的典型结构,调节方法,主要阐述基于遗传算法的PID控制技术。
关键词:遗传算法,PID,控制1.PID控制概述按偏差的比例(Proportional)、积分(Integral)、积分(Derivative)控制,简称PID控制。
PID控制是过程控制中广泛应用的一种控制。
系统由模拟PID控制器和被控对象构成。
PID控制器是一种线性控制器。
它根据给定值r(t)与实际输出值c(t)构成偏差:e(t) = r(t)- c(t)。
PID控制器是将偏差的比例P、积分I和微分D通过线性组合构成控制量,对被控对象进行控制,故称PID控制器。
PID控制的控制效果的好坏在很大程度上取决于系统的参数的整定,即控制器参数的选择,那么控制器的三个参数究竟对控制效果起什么样的作用呢?简单说来,PID控制器各校正环节的作用如下:(1)比例环节比例环节能及时成比例地反映控制系统地偏差信号,偏差一旦产生,控制器立即产生控制作用,以减少偏差。
比例系数K,增大,可以加快系统响应速度,减小系数稳态误差,提高控制精度。
但是过大会产生较大超调,甚至导致不稳定;若取得过小,能使系统减少超调量,稳态裕度增大,但会降低了系统的调节精度,使过渡过程时间延长。
根据系统控制过程中各个不同阶段对过渡过程的要求以及操作量的经验,通常在控制的初始阶段,适当地把K,放在较小的档次,以减小各物理量初始变化的冲击;在控制过程中期,适当加大KP,以提高快速性和动态精度,而到过渡过程的后期,为了避免产生大的超调和提高静态精度稳定性,又将K,调小。
(2)积分环节积分调节可提高系统的抗干扰能力,主要用于消除静差,提高系统的无静差度,适用于有自平衡性的系统。
基于遗传算法和模糊神经网络的PID控制器参数优化方法周頔
【期刊名称】《计算机与现代化》
【年(卷),期】2013(0)9
【摘要】针对传统的PID控制器参数优化需要被控对象精确数学模型问题,利用不需要被控对象数学模型的模糊控制理论和神经网络的自适应和自学习的能力以及遗传算法的全局优化能力,提出一种基于遗传算法、模糊控制理论和神经网络相结合的PID控制器参数优化方法.该方法首先利用十进制编码对遗传算法进行编码,然后集中优化模糊神经网络参数和结构,接着再用优化的模糊神经网络确定PID控制器参数,获得模糊神经网络PID控制器.最后通过达州钢铁集团扎钢厂中央空调控制系统实际应用,结果表明该优化方法具有较强的抗干扰能力和鲁棒性.
【总页数】5页(P8-12)
【作者】周頔
【作者单位】四川文理学院,四川达州635000
【正文语种】中文
【中图分类】TP391
【相关文献】
1.基于遗传算法的模糊神经网络PID控制器研究 [J], 李强;张茂青;孙长岭;李子曦
2.基于遗传算法的电液阀控系统PID控制器参数优化方法 [J], 孙宇;康波
3.基于模糊神经网络和遗传算法的仿人智能PID控制器设计 [J], 张木军;司徒忠
4.基于遗传算法的PID控制器参数优化方法研究 [J], 张倩;杨耀权
5.一种基于模糊神经网络和遗传算法的智能PID控制器 [J], 阎树田;刘鹏军;苏玉瑞;乔伟峰
因版权原因,仅展示原文概要,查看原文内容请购买。
基于遗传优化算法对离散PID控制器参数的优化设计摘要PID控制作为一种经典的控制方法,从诞生至今,历经数十年的发展和完善,因其优越的控制性能业已成为过程控制领域最为广泛的控制方法;PID控制器具有结构简单、适应性强、不依赖于被控对象的精确模型、鲁棒性较强等优点,其控制性能直接关系到生产过程的平稳高效运行,因此对PID控制器设计和参数整定问题的研究不但具有理论价值更具有很大的实践意义,遗传算法是一种借鉴生物界自然选择和自然遗传学机理上的迭代自适应概率性搜索算法。
本论文主要应用遗传算法对PID调节器参数进行优化。
关键词:遗传优化算法PID控制器参数优化1.前言PID调节器是最早发展起来的控制策略之一,因为它所涉及的设计算法和控制结构都是简单的,并且十分适用于工程应用背景,此外PID控制方案并不要求精确的受控对象的数学模型,且采用PID控制的控制效果一般是比较令人满意的,所以在工业实际应用中,PID调节器是应用最为广泛的一种控制策略,也是历史最久、生命力最强的基本控制方式。
调查结果表明: 在当今使用的控制方式中,PID型占84. 5% ,优化PID型占68%,现代控制型占有15%,手动控制型66%,人工智能(AI)型占0.6% 。
如果把PID型和优化PID型二者加起来,则占90% 以上,这说明PID控制方式占绝大多数,如果把手动控制型再与上述两种加在一起,则占97.5% ,这说明古典控制占绝大多数。
就连科学技术高度发达的日本,PID控制的使用率也高达84.5%。
这是由于理论分析及实际运行经验已经证明了PID调节器对于相当多的工业过程能够起到较为满足的控制效果。
它结构简单、适用面广、鲁棒性强、参数易于调整、在实际中容易被理解和实现、在长期应用中己积累了丰富的经验。
特别在工业过程中,由于控制对象的精确数学模型难以建立,系统的参数又经常发生变化,运用现代控制理论分析综合要耗费很大的代价进行模型辨识,但往往不能达到预期的效果,所以不论常规调节仪表还是数字智能仪表都广泛采用这种调节方式。