运输机机载防撞系统的体系构建研究
- 格式:doc
- 大小:30.00 KB
- 文档页数:4



浅谈军民航防相撞工作发布时间:2022-03-11T08:14:34.453Z 来源:《科技新时代》2022年1期作者:李聪[导读] 在我国民航飞行安全中,“军民航飞行矛盾”是我国民航三大主要安全问题之一。
民航中南地区空中交通管理局510000摘要: 在我国民航飞行安全中,“军民航飞行矛盾”是我国民航三大主要安全问题之一。
军民航航空器相撞防治管理工作一直是军航和民航运行安全管理工作的重点,军民航防撞工作就是指防止军航和民航的航空器在空中运行时产生运行矛盾,防止空中运行事故的发生。
杜绝军民航航空器的运行矛盾,加强军民航管制部门的协调合作,能有效的提高我国民航系统的运行安全和效率,也对军航的军事活动以及演习有着重要的影响。
军民航防撞工作是一项需要长期关注和进行的严肃政治任务,不仅关系到人民的生命财产安全,更加关系到国家的利益以及形象。
加强军民航防撞工作的管理能够有效的促进我国社会主义现代化进程的发展,构建一个和谐的空中运行环境。
本文就我国民航军航防相撞安全管理工作进行了研究,并且在理论上提出了现行环境下的一些可行的管理措施。
关键词:军民航相撞;危险控制引言: 自国家改革开放以后,我国的经济发展突飞猛进,特别是进入到本世纪以后,我国在经济上已经位居国际前列,民航空中交通运输量也是位居全球第二的位置,且我国民航的空中交通运输量一直在稳定的增长之中,随着我国民航事业的发展,空中交通网络越来越复杂,而且机队规模发展越来越宏大。
空中矛盾日趋明显,航空器之间的矛盾冲突不断。
军航和民航航空器之间的矛盾便是我国民航空中运行的主要三大矛盾之一,对空中交通运行有着极大的安全威胁。
空中交通一直是以“安全第一”为首要原则,而且“安全”也是空中交通管制的绝对目的,军民航防相撞工作是军航和民航管制部门的一项重点安全管理工作,加强军民航管制部门的协作,切实做好空中防撞工作,有利于我国民航事业的长期发展也有利于我国国防建设稳固。
军民航防撞管理工作不仅是一项空中交通管理工作,还是一项重要的政治任务,关系到国家的利益。

山地单轨运输机施工方案1. 引言山地地区的交通运输一直都是一个问题,传统的道路建设在山地地区受到了很大的限制和挑战。
为了解决这一问题,山地单轨运输机应运而生。
本文档将详细介绍山地单轨运输机的施工方案,包括设计、材料、施工流程以及相关安全措施。
2. 设计方案山地单轨运输机的设计需要考虑到山地地区的复杂地形和不稳定的地质条件。
设计方案应综合考虑以下几个方面:2.1 轨道设计轨道的设计应考虑到山地地形的变化和施工过程中可能出现的地质灾害。
轨道的布置应遵循最佳的地形线,并在需要的地方设置支撑结构以增加轨道的稳定性。
2.2 全自动控制系统山地单轨运输机应采用全自动控制系统,能够根据需求灵活调整运输速度和方向。
该系统应具备自动导航、防撞控制、故障监测等功能,以确保运输的安全和稳定。
2.3 载重能力山地单轨运输机应具备足够的载重能力,以满足不同工程项目的需求。
载重能力的大小需要根据具体情况进行设计和确定。
3. 材料选择在山地单轨运输机的施工中,材料的选择至关重要。
以下是常用的材料:•钢材:用于制作轨道、支撑结构和运输车辆等。
应选择具有抗腐蚀、强度高的优质钢材。
•橡胶:用于制作轮胎,能够提高运输车辆的附着力和减少噪音。
•混凝土:用于建造轨道的支撑基础和护坡等。
应选择强度高、耐久性好的混凝土材料。
以上材料的选择应根据施工环境、工程需求和经济性综合考虑。
4. 施工流程山地单轨运输机的施工流程主要包括轨道建设、设备安装、系统调试和运行试验等多个步骤。
以下是一个一般性的施工流程:4.1 轨道建设•选址:根据实际需求选择合适的运输路线。
•地基施工:清理地表杂物,进行基础土方开挖,建造基础支撑结构。
•轨道铺设:根据设计方案进行轨道的铺设和固定。
4.2 设备安装•运输车辆安装:将运输车辆安装到轨道上,并进行调试。
•控制系统安装:根据设计要求,安装全自动控制系统,并进行调试和测试。
4.3 系统调试•控制系统调试:测试控制系统的各项功能,确保运输车辆的正常运行。
ACAS防撞系统的一些学习总结!一、定义ACASI:仅能够提供“看见和避让”辅助信息的ACAS,不能产生决断咨询(RAs)。
注:ACASⅠ不作为 ICAO 建议的的标准在国际范围内实施。
因此只有ACASⅠ特征要求必须与其他ACAS配置兼容。
ACAS II: 除交通咨询(TAs),还提供决垂直决断咨询(RAs)的ACAS。
ACAS III : 除交通咨询(TAs),还提供垂直与水平决断咨询(RAs)的ACAS。
爬升 RA : 建议上升而不是加速上升的确定 RA。
最近接近 : ACAS 航空器与入侵者之间最小的距离的发生。
因此最近接近距离就是两架航空器之间最小的距离,而最近接近时间就是它发生的时间。
矫正的RA : 建议飞行员偏离当前飞行路径的决断咨询。
下降的 RA : 建议下降但不是加速下降的确定RA。
加速率RA : 包含建议高度增加率的强度超过原有的上升或下降 RA 的决断咨询。
确定的 RA:建议飞行员或上升或下降的决断咨询(适用于AC ASⅡ)。
预防性的RA:建议飞行员避免偏离当前飞行航线但并不要求对当前飞行航线做任何改变的决断咨询。
自身航空器:装备有作为回避目标 ACAS 设备的航空器,该 ACAS 为保护航空器免受可能的碰撞,会根据ACAS 指示进行一次机动动作的响应。
威胁航空器:一架需要被特别关注的闯入机,或者因为它与自身航空器非常接近,或者由于连续的监视距离和高度测量指出它处在可能与自身航空器碰撞或接近碰撞的航线。
就威胁航空器提出的告警时间应小到足够确认决断咨询(RA)。
潜在威胁:指需要被特别关注的闯入机,它或者与自身航空器非常接近,或者说根据连续的监视距离与高度测量,它可能与自身航空器碰撞或接近碰撞)潜在威胁所提出的警告时间应足够小到交通咨询(TA)确认的范围,但又没有小到提出决断咨询(RA)的范围。
RA 方向 : 当 ACAS II RA 要求上升或限制下降,其 RA 方向为“向上的”;当 ACAS II RA 要求下降或限制上升,其 RA 方向为“向下的”;当 ACAS II RA 要求限制垂直速率维持在一个特定范围内时,其RA 方向可同时为“向上的”和“向下的”。
航空管制的首要任务是防止所管理的空域中飞机相互发生碰撞事件。
本文针对解决上述问题的关键 飞机防撞率模型的建立进行了探讨。
其结论为空域的高度分层奠定了理论基础。
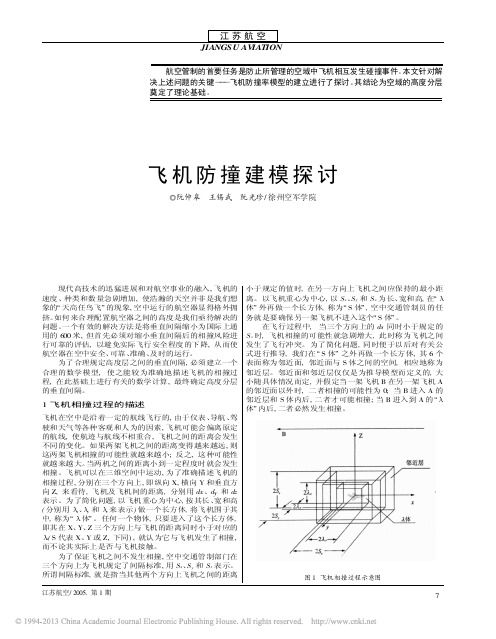
飞机防撞建模探讨阮仲皋王锡武阮光珍/徐州空军学院图1飞机相撞过程示意图现代高技术的迅猛进展和对航空事业的融入,飞机的速度、种类和数量急剧增加,使浩瀚的天空并非是我们想象的 天高任鸟飞 的现象,空中运行的航空器显得格外拥挤。
如何来合理配置航空器之间的高度是我们亟待解决的问题。
一个有效的解决方法是将垂直间隔缩小为国际上通用的600米,但首先必须对缩小垂直间隔后的相撞风险进行可靠的评估,以避免实际飞行安全程度的下降,从而使航空器在空中安全、可靠、准确、及时的运行。
为了合理规定高度层之间的垂直间隔,必须建立一个合理的数学模型,使之能较为准确地描述飞机的相撞过程,在此基础上进行有关的数学计算,最终确定高度分层的垂直间隔。
1飞机相撞过程的描述飞机在空中是沿着一定的航线飞行的,由于仪表、导航、驾驶和天气等各种客观和人为的因素,飞机可能会偏离原定的航线,使航迹与航线不相重合,飞机之间的距离会发生不同的变化。
如果两架飞机之间的距离变得越来越远,则这两架飞机相撞的可能性就越来越小;反之,这种可能性就越来越大。
当两机之间的距离小到一定程度时就会发生相撞。
飞机可以在三维空间中运动,为了准确描述飞机的相撞过程,分别在三个方向上,即纵向X,横向Y 和垂直方向Z,来看待,飞机及飞机间的距离,分别用dx 、d y 和d z表示。
为了简化问题,以飞机重心为中心,按其长、宽和高(分别用 x 、 y 和 z 来表示)做一个长方体,将飞机围于其中,称为 体 。
任何一个物体,只要进入了这个长方体,即其在X 、Y 、Z 三个方向上与飞机的距离同时小于对应的s (S 代表X 、Y 或Z,下同),就认为它与飞机发生了相撞,而不论其实际上是否与飞机接触。
为了保证飞机之间不发生相撞,空中交通管制部门在三个方向上为飞机规定了间隔标准,用S x 、S y 和S z 表示。
摘要目前,很多厂矿企业车间使用的天车往往是多台配合使用。
一直以来,因天车碰撞发生的安全事故给国民生产生活造成了巨大损失。
传统的解决方案难以有效解决这一难题,本文将超声波测距技术应用于该系统,提出了一种较为可靠的方案。
本设计采用AT89C51单片机为核心,搭建系统的控制模块,负责系统的调度,信号的处理,并给出相关的外围接口电路。
超声波接收模块选用CX20106作为接收器,完成信号的采集处理放大。
电机减速模块选用西门子MM440变频器,利用DAC0832将单片机的数字控制信号转换为模拟控制信号,然后将模拟信号输入到变频器中达到改变频率控制电机转速的目的。
通过利用单片机对超声波往返时间的计算,达到测量天车距离的目的。
然后使用LCD1602液晶模块显示实时距离,并利用单片机判断天车距离是否达到报警距离和危险距离,并做出相应的处理。
本文设计的天车防碰撞系统技术可靠经济实用,具有很好的使用价值。
设计功能完善,接口资源丰富,可以方便的对系统进行二次开发。
关键词:单片机;超声波;测距;报警AbstractCranes are often used in many factories and mine.All along,safety incidents occurred in cranes collision caused a great loss of lives andproperty.Traditional solutions Can not effectively solve this problem.In this paper,radio frequency identification technology has been used in this system,proposed amore reliable option.This design uses AT89C51 microcontroller as the core, to build the system control module, responsible for the scheduling, signal processing, and gives the associated peripheral interface circuit. CX20106 ultrasonic receiver module used as a receiver, signal acquisition and processing to complete amplification. Motor deceleration Siemens MM440 Inverter module selection, the use of the DAC0832 digital control signal the microcontroller converts the analog control signal, then the analog signal input to the inverter to change the purpose of frequency control motor speed. Through the use of single-chip ultrasonic round-trip time calculations, to achieve the purpose of measuring the distance crane. LCD1602 display module and then use the real-time distance, and the use of the microcontroller to determine whether the alarm distance from the crane and dangerous distance, and make the appropriate treatment.This design of crane anti-collision technology, reliable and economical system, has a very good value. Functional design, the interface is rich in resources, the system can be easily secondary development.Keywords: microcontroller; ultrasonic; range- distance;warning;目录第1章绪论11.1天车防碰系统研究意义与前景11.2天车防碰系统的国外发展11.3任务要求2第2章方案论证32.1 总方案框图32.2 主控制模块的选择32.3 测距模块的选择42.4显示模块的选择62.5电机调速模块的选择7方案确定12第3章硬件电路设计133.1 AT89C51主控制模块133.2 CX20106超声波接受模块143.3发射电路方案设计153.4系统显示电路设计163.5驱动电路的设计17第4章软件设计254.1系统软件功能程序流程图254.2系统安全天车距离模型284.2.1系统安全跟车距离模型的建立284.2.2模型中各参数的确定31第5章结论33致34参考文献35附录Ⅰ36附录Ⅱ错误!未定义书签。
飞行器自主导航与防碰撞技术研究导语:随着航空业的迅速发展,飞行器的自主导航与防碰撞技术成为了研究的焦点。
本文将探讨飞行器自主导航与防碰撞技术的现状、挑战和未来发展,以及相关的研究成果和应用。
1.引言自主导航与防碰撞技术是指飞行器能够在没有人为干预的情况下,通过内部的算法和传感器系统,实现精确导航和避免与其他飞行器或障碍物发生碰撞的能力。
这种技术被广泛应用于民航、军事和无人机等领域。
2.自主导航技术的现状目前,飞行器的自主导航技术已经取得了显著的进展。
通过利用全球卫星导航系统(GNSS)和惯性导航系统(INS),飞行器可以实时获取位置和姿态信息,并根据预先设定的导航路径进行飞行。
同时,使用地面导航设施和雷达系统可以提供更精确的导航和定位信息。
然而,自主导航技术仍然面临一些挑战。
首先,GNSS信号可能会受到建筑物、地形和天气等因素的干扰,导致导航精度下降。
其次,惯性传感器可能存在漂移和噪声问题,导致导航误差增大。
此外,自主导航系统需要具备高度的稳定性和鲁棒性,以应对复杂多变的飞行环境。
3.防碰撞技术的现状飞行器的防碰撞技术包括传统的空中交通控制系统(ATC)和新兴的自适应防碰撞系统。
传统的ATC系统通过地面控制台和雷达监控飞行器的位置和航向,以避免碰撞。
然而,随着飞行器数量的增加,传统的ATC系统已经面临无法满足实时监控和碰撞预防需求的问题。
近年来,自适应防碰撞系统逐渐发展起来。
这种系统利用飞行器上安装的传感器和通信设备,与其他飞行器进行实时通信,并采取相应的行动来避免碰撞。
例如,当飞行器之间的距离接近预设的安全距离时,系统可以自动调整飞行高度、速度和航向,以确保安全。
这种自适应防碰撞系统为飞行器带来了更高的安全性和可靠性。
4.飞行器自主导航与防碰撞技术的研究成果在飞行器自主导航与防碰撞技术的研究领域,已经取得了一些重要的成果。
例如,研究人员开发了新的导航算法和模型,通过结合GNSS 和INS数据,提高了导航精度和鲁棒性。

飞行器防碰撞系统设计与实现随着民航业的飞速发展和飞行器数量的增加,飞行器之间的防碰撞系统显得尤为重要。
防碰撞系统是飞行器上的一种被动安全系统,它能够帮助飞行员排除或减小飞行中的障碍,避免飞行器发生非预期的接触事故。
本文将从设计和实现两个方面,来探讨飞行器防碰撞系统的相关内容。
一、设计1.1 防碰撞系统的原理防碰撞系统的工作原理是通过探测飞行器周围的空间,监测飞行器与其他目标之间的距离,依据距离和速度等参数,在飞行器遇到其他目标时发出警报或者控制飞行器自动躲避,避免产生碰撞事故。
1.2 防碰撞系统的组成防碰撞系统是由多个传感器、控制器、计算机和警示系统等部分组成的,其中传感器主要用于探测飞行器周围的目标,计算机用于处理传感器探测到的数据,判断飞行器与其他目标之间的距离,速度和方向等参数,控制器则用于根据计算机的数据控制飞行器的行动,如避让或者警告等。
警示器则是用于发出警告声和提示信号。
1.3 防碰撞系统的分类根据使用场景的不同,防碰撞系统可以分为地面防碰撞系统、空中防碰撞系统和海上防碰撞系统等。
空中防碰撞系统又可以分为TCAS系统、ACAS系统和ADS-B系统等,其中最主流的是ADS-B系统。
二、实现2.1. ADS-B系统的实现ADS-B是一种全球卫星导航系统,能够将飞行器位置,速度和方向等信息通过VHF频段广播到周边的其他飞行器和地面站,实现飞行器之间位置交换的功能。
这种卫星导航系统的出现,使得飞行器防碰撞系统更为精准和高效。
2.2 ADS-B系统的优势与传统的地面防碰撞系统相比,ADS-B系统有很多优势,如通信距离更远,对设备要求更少,更加安全可靠,能够为飞行员提供更丰富的数据等。
此外,通过ADS-B系统,飞行器之间可以实现自主避让,极大地提高了防碰撞能力。
2.3 ADS-B系统的实现难点虽然ADS-B系统具有很多优势,但在实现过程中也面临一些难点,其中最主要的问题是频段拥挤和干扰。
由于ADS-B使用的是VHF频段,因此在系统中可能会受到其它雷达或广播信号的影响。
飞机场防撞设备的种类及在交通控制中的应用引言:随着航空业的发展,飞机场的交通量不断增加。
为了确保航空交通的安全运行,飞机场防撞设备起到了关键作用。
本文将介绍飞机场防撞设备的种类以及它们在交通控制中的应用。
一、飞机场防撞设备的种类1.地面雷达系统地面雷达系统是一种广泛应用于飞机场的防撞设备。
它利用雷达技术,通过感应飞机和其他行驶中的车辆在地面的位置,以及速度和方向的变化。
地面雷达系统能够提供实时的数据,向飞行员和交通管制员提供有关飞机和地面车辆的位置和动态信息,有助于防止飞机和地面车辆之间的碰撞。
2.跑道入侵警告系统跑道入侵警告系统用于防止未经许可的车辆或人员进入跑道。
该系统通过使用雷达、红外传感器和摄像机等技术,将能够主动检测到接近或进入跑道区域的车辆或行人,并通过无线通信或声光报警的方式通知相关人员。
这种系统在强化飞机场交通控制和保障飞行安全方面起着至关重要的作用。
3.障碍物监测系统障碍物监测系统用于监测飞机起降和滑行道上的障碍物,如碎片、工具、动物等。
该系统通常采用摄像机、传感器和图像识别技术,能够及时发现并跟踪在飞机活动区域内的障碍物,及时向飞行员和交通管制员发出警示,确保飞机活动区域的安全。
4.地面移动碰撞预警系统地面移动碰撞预警系统旨在防止地面车辆在飞机场内发生互相碰撞的情况。
该系统通过将车辆装备了特定的设备,如雷达、GPS等,实时监控车辆的位置和速度,并通过无线通信或声光报警的方式提醒驾驶员注意前方或周围的车辆,减少碰撞风险。
二、飞机场防撞设备在交通控制中的应用1.提高交通运行效率飞机场防撞设备的应用使交通管制员能够更准确地掌握飞机和地面车辆的位置信息,并及时发现潜在的碰撞风险。
通过及时的警示和指导,交通管制员可以更好地调度飞机和地面车辆,提高交通运行效率,减少延误。
2.增强安全意识飞机场防撞设备的使用帮助飞行员和地面车辆驾驶员增强了防范碰撞的意识。
实时的警报和警示信息使他们能够更加警觉地遵守交通规则和制度,避免任何可能的碰撞事故。
![汽车防撞单片机控制系统研制(答辩)[PPT课件]](https://img.taocdn.com/s1/m/feaffe9101f69e314232948d.png)

机载防撞系统TCASⅡ钱琛(中国民用航空飞行学院空管学院四川广汉618307)摘要:介绍了机载防撞系统TCASⅡ的功用,其上提供的信息与此系统的基本工作原理。
关键词:机载防撞系统TCASⅡ功用EHSI 工作原理一、机载防撞系统的功用TCASⅡ可提供本机邻近空域中的交通状况显示,发出交通咨询TA并能在确实存在潜在的危险接近时提前向机组发出决断咨询(解脱咨询)RA。
TCASⅡ所提供的决断咨询回避措施为垂直机动咨询:爬升(clime)或下降(decent)。
二、TCASⅡ在EHSI上提供的信息TCASⅡ能提供入侵(相遇)飞机的相对位置等图象信息,相关的字符信息,以及与交通咨询、解脱咨询相关联的语音提醒信息等,显示在TCAS的专用显示器、电子飞行仪表系统或其它显示器上。
显示在EHSI或导航显示器ND上的TCAS信息主要是入侵飞机的图像及其相对位置、威胁等级等。
(1)入侵飞机的相对位置。
(2)威胁等级——以四种不同的符号来表示对本机威胁等级不同的飞机:➢一般(其它)飞机以空心的菱形图案表示;➢邻近飞机显示为实心的菱形;➢发出交通咨询的飞机的图象为黄色的圆形;➢交通咨询伴随有语音提醒信息“TRAFFIC,TRAFFIC”(“交通,交通”)。
➢解脱咨询的飞机为红色的矩形图案。
三、TCASⅡ在EADI上提供的信息1、EADI可用于显示TCAS所发出的解脱咨询信息。
解脱咨询信息是本机为回避入侵飞机所应采取的垂直机动措施,如爬升、下降等TCAS除了可以提供各种视觉信息发出交通咨询或解脱咨询信息外,还同时以合成语音来提醒飞行员。
四、EFIS控制合对TCAS显示的控制由于TCAS系统需利用EHSI和EADI 来显示交通咨询和解脱咨询等信息,所以与EFIS控制合的上的有关控制元件的设置有关。
(1)EHSI的工作模式➢在EHSI工作于NA V、VOR/ILS、MAP 模式时,可以显示TCAS的信息。
(2)TFC按钮➢只有在按下TFC按钮后,EHSI才可以显示TCAS的有关信息。

机载防撞系统飞机上的防撞系统,美国航空体系称为空中交通预警和防撞系统(TCAS:Traffic Alert and Collision Avoidance System)欧洲航空体系称为机载防撞系统(ACAS:Airborne Collision Avoidance System)),两者实际上的含义、功能是一致的。
防撞系统可显示飞机周围的情况,并在需要时提供语音告警,同时帮助驾驶员以适当机动方式躲避危险,这些都有助于避免灾难性事故的发生。
下面以TCAS为例讲述。
TCAS 的历史可追溯到1955年,当时本迪克斯航空电子公司(目前并入霍尼韦尔公司)的J.S.Morrell博士发表了“碰撞物理”一文。
其中包括确定进近飞机间接近速率的计算机算法,这也是研究所有防撞系统的基础。
在20世纪60年代和七十年代,该公司为美国陆军和美国联邦航空管理局(FAA)研制了数架原理样机,并在80年代后期获得了FAA对TCAS的首次鉴定。
原理:在二次雷达用应答机确定飞机的编号、航向和高度的原理上,把询问装置装在飞机上,使飞机之间可以显示相互之间的距离间隔,从而使驾驶员知道在一定范围内飞行的航空器之间的相互间隔及时采取措施,避免碰撞。
和二次雷达一样,TCAS系统需要飞机上都装有应答机才有作用。
关于二次雷达可参考航空管制雷达的类型组成和功能:TCAS主要由询问器、应答机、收发机和计算机组成。
监视范围一般为前方30海里,上、下方为3000米,在侧面和后方的监视距离较小。
(为了减少无线电干扰,管理条例对TCAS的功率有所限制。
它把TCAS的前向作用距离限定在45英里左右,侧向和后向作用距离则更小。
)TCAS的询问器发出脉冲信号,这种无线电信号称为询问信号,与地面发射的空中雷达交通管制信号类似。
当其他飞机的应答器接收到询问信号时,会发射应答信号。
TCAS的计算机根据发射信号和应答信号间的时间间隔来计算距离。
同时根据方向天线确定方位,为驾驶员提供信息和警告,这些信息显示在驾驶员的导航信息显示器上。

引言随着航空业的迅速发展,军用航空与民用航空在空中活动的频率和范围上都不断增加。
为了确保航空活动的安全,必须制定一套有效的军民航防相撞方案。
本文将探讨军民航防相撞方案的重要性和具体的实施方法。
1. 背景军民航相撞是指在空中执行任务的军用航空器与执行民用航空任务的民用航空器在空中发生碰撞或接近碰撞的情况。
这种情况不仅会造成人员伤亡和财产损失,还会对国防及经济发展产生重大影响。
因此,制定防相撞方案势在必行。
2. 目标制定军民航防相撞方案的最主要目标是确保军用航空和民用航空的安全,减少相撞事故的发生。
具体目标包括: - 确保军民航空器在空中的航线安全,避免发生相撞; - 提高军用航空和民用航空的协同作战能力,减少误判和误操作; - 建立高效的监测和警示系统,及时报警并采取措施避免相撞; - 促进军用航空和民用航空的信息共享和协调,提高整体防相撞能力。
3. 实施策略为了达到上述目标,可以采取以下实施策略: ### 3.1 航空器识别和标识系统建立一套有效的航空器识别和标识系统,包括通过雷达、卫星等技术手段,对航空器进行实时监测和识别。
同时,对军用航空器和民用航空器进行不同的标识,以便在空中进行区分和判断。
3.2 空中交通管制系统建立健全的空中交通管制系统,通过引入先进的技术手段,对军民航空器的起飞、降落和飞行路线进行严格控制。
同时,加强与航空器通信,确保信息的及时传递和共享,以便及时做出应对措施。
3.3 航空器通信系统确保军用航空器和民用航空器之间有良好的通信系统,以便在空中发生紧急情况时能够及时联系和协调处理。
此外,还应加强与地面控制中心的通信,确保信息的准确传递和处理。
3.4 人员培训和意识教育加强军用航空和民用航空的人员培训,提高其对防相撞重要性的认识。
同时,通过举办培训班、宣传活动等形式,加强广大航空从业人员的意识教育,培养他们的安全意识和应急处理能力。
4. 预期效果通过上述实施策略,我们预期可以达到以下效果: - 大幅降低军民航相撞事故发生的概率; - 提高空中交通的流畅性和效率,减少航空拥堵现象; - 提高军民航空的整体战斗力和运输能力; - 降低防相撞方案的实施成本。

军民航防相撞之协调工作军民航防相撞工作是空管安全保障中的一项长期、复杂的系统工程。
空中飞行形势瞬息万变,管制部门要落实好该项工作,依照纲领性的工作要求,并通过双方不断协调完成任务。
对军民航空中飞行冲突的调配,是在拟定保障方案采取飞行前预先调配的基础上,实时通过地面协调完成的。
但在协调工作过程中常出现彼此避让需求难以满足的情况,或协调时机把握不准确,导致军民航飞行产生不可避免的冲突。
1 开展军民航防相撞协调工作的重要性我国采取了军民航运单位之间在基于双方协议约束下的即时协调,军民航临时互派联络员协调防相撞工作,涉及环节较多,协调者无法即时决策,尤其是军民航飞行量大、增长迅速、跨区域活动限制较多,无法适应实际运行需求,导致军民航相撞风险日益增大,航班延误概率提升、延误时间延长,导致各种社会生产成本迅速增大。
因此,提高军民航防相撞工作的协调效率不仅有利于防止相撞,还可提升飞行效益。
2 军民航防相撞协调工作存在的问题2.1 缺少统一的工作方式军航飞行指挥包括飞行指挥员、地面领航员、飞行管制员等人员,不直接对空指挥,仅充当协调员角色,缺少民航管制经验,出现紧急情况时往往会错过最佳处置时机,而民航只有空管人员。
这些人员的部门不同,无法统一组织教育和培训,缺少统筹思想,各自工作的侧重点与自身部门相关,缺乏对整体工作的利弊权衡,传递环节较多,常延误时机,极易导致信息失真,影响协调工作的效果。
2.2 军民航标准不一致民航原属军航体系,大部分标准适用于两大飞行管理主体。
民航脱离军航运行后,航路指挥划归民航管理,在同一空域内逐步形成了各自独立的法规标准,两者在运行标准、间隔标准、差错标准上存在较大的差异,军民航之间协调缺乏基本的前提条件,规章与实际协调地位倒置,协调难度较大。
2.3 军民航信息不对称军航管制部门利用自身优势获取了更多的直接的军民航飞行动态信息,但出于保密需要,民航雷达无法扫描显示军航飞行动态信息,仅靠军航管制部门通报协调。
运输机机载防撞系统的体系构建研究【摘要】为了减少和避免飞机相撞的危险,结合防撞设备的发展,论证了运输机加装机载防撞系统的必要性,提出了运输机机载防撞系统应具备监视、跟踪、潜在威胁评估、交通告警显示、决断告警显示、空对空协调等六大功能;针对国内运输机机型多、制式不同、设备差异较大等特点,给出了构建机载防撞系统的对策与措施。
【关键词】运输机;机载防撞系统;功能设计;对策与措施Abstract:In order to reduce and avoid dangerous aircraft collision,combined with the development of anti-collision device,proved the necessity of conveyor with airborne collision avoidance system,the transport aircraft the airborne collision avoidance system should possess six functional of monitoring ,tracking,potential threat assessment,traffic alarm display,alarm display,spatial decision。
According to the characteristics of domestic transport models many different devices,and puts forward the strategies and measures for constructing the airborne collision avoidance system.Key words:transport aircraft;TCAS;Function design;Strategies and measures为了减少和避免空中飞机相撞的危险,航空界持续开展了防撞技术和防撞设备的研究。
1955年,Honeywell公司的J.S.Morrell博士提出了根据两架飞机到达最接近点所需时间的主动防撞概念,得到业界的认可。
一、防撞设备的发展在防撞设备方面,50年代曾利用电波的多普勒效应原理研制了空中防撞设备,但因误报很多,终未实用。
60年代末70年代初,若干厂家开发了航空器防撞系统,但该设备在繁忙机场区域的运营中发现有较高的虚假警告,此外它要求其他飞机也必须装备该类设备。
70年代中期,开发了信标防撞系统BCAS。
该系统利用空中交通管制雷达信标系统ATCRBS应答机发回的数据来决定对方飞机的距离和高度。
所有的航线运输飞机、军用飞机和大多数通用航空飞机上都安装有ATCRBS应答机。
因此任何装备BCAS的飞机能够避开大多数其它飞机而得到保护。
此外,正在发展的S模式应答机使用离散选址通信技术,使两架冲突的BCAS飞机能高度可靠地完成避让机动的协调。
1981年,FAA决定发展并装备空中交通告警及防撞系统TCAS(Traffic Alert And Collision Avoidance System)。
TCAS是在BCAS的基础上发展起来的,但增加了新的功能,特别是TCAS II能提供垂直方向的避让措施,能在交通密度高达每平方海里0.3架飞机的空域正常运行。
因此,TCAS系统是完全不依赖地面系统的机载设备。
它通过ATC应答机相互对话,自行完成探测和跟踪邻近空域飞机的任务。
根据接近程度,向机组提供不同级别的告警,必要时推荐避让措施。
二、构建运输机机载防撞系统的必要性一般来讲,运输机(包括民用和军用运输机)的飞行航线与民航客机航线有很多交叉,发生空中危险接近的几率相应增大。
所以,一些发达国家不但民用运输机要将TCAS系统作为基本配置,而且军用运输机(特别是大型和主要的运输机)也要加装配备TCAS系统,如美国在2002年由洛克希德·马丁公司完成了为所有美国空军C-5飞机(124架)加装TCAS设备的工作;2005年,美国波音公司为美国空军、海军和海军陆战队的500架C-130运输机加装了Honeywell公司的TCAS机载设备。
在欧洲,法国空军的空客军用型,以及已经推出的军用空客A-400飞机,都装备TCAS设备。
俄罗斯也为其军用的伊尔-76、图-154、雅克-42、安-124等飞机装备了Honeywell公司的TCAS系统。
美国的其它军用飞机也先后加装了TCAS系统,如F-18、F-22就直接装备了ETCAS(增强型机载防撞系统)。
另据报道,美国与瑞典合作,在F-16飞机上试飞与飞机自动驾驶仪交联的机载防撞系统,以验证将来在无人机上应用的可行性。
TCAS有三种类型,即TCAS Ⅰ型、TCAS Ⅱ型、TCAS Ⅲ型。
其中TCAS Ⅰ型为基本型。
它是一种低功率、短距离系统,仅能探测临近最直接范围内的飞机,已经停止使用。
能同时提供垂直和水平规避指令的TCAS Ⅲ型还处于开发阶段,国内外主要装备的均为TCAS Ⅱ系统(以下简称TCAS系统)。
目前国外研制开发TCAS II设备的厂家主要有Honeywell公司、Rockwell Collins公司和ACSS公司等。
国际民航组织(ICAO)在2000年1月1日起要求亚太地区安装TCAS II 系统。
为了符合ICAO的规定并与国际接轨,中国民用航空总局曾经于2000年6月16日发出关于安装TCAS II有关问题的通知和相应的适航指令,规定:从2000年12月31日起,所有最大起飞重量超过15000公斤或批准的旅客座位数超过30的民用固定翼涡轮发动机飞机,均应安装TCAS II;从2003年12月31日起,所有最大起飞重量超过5700公斤或批准的旅客座位数超过19的民用固定翼涡轮发动机飞机,均应安装TCAS II。
目前国内应用的机载防撞系统均为TCAS Ⅱ系统,主要有CAS 67A、TCAS2000和TCAS4000等型号。
三、运输机机载防撞系统的功能设计通过调研和技术分析,各类运输机要实现空中避让和防撞这一总要求,必须具备监视、跟踪、潜在威胁评估、交通告警(TA)显示、决断告警(RA)显示、空对空协调等六大功能。
(1)监视功能——对空中周围飞机飞行轨迹的监视功能。
探测在系统监视范围内出现的装有S模式或A/C模式应答机的飞机,建立航迹,比较并更新现存航迹。
(2)跟踪功能——获取有可能危险接近飞机的间距、方位、高度等相关信息并进行相对位置、接近速率与高度变化等相关参数的计算进而实现跟踪的功能。
对接近飞机进行跟踪,获得两机间的距离、相对方位和相对高度等参数,并计算接近飞机的相对位置、接近速率和高度变化等信息。
(3)潜在威胁评估功能——通过冲突探测和逻辑处理,具备对潜在危险程度的评估功能。
利用跟踪数据,通过冲突探测和解决处理逻辑,与告警参数进行比较,确定接近飞机的潜在威胁,当出现相撞危险时,根据危险的程度发出交通告警和决断告警。
(4)交通告警(TA)显示功能——根据危险程度发出显示、音响等多种物理形式的交通告警的功能。
通过显示器显示目标的符号、位置、颜色和数据标牌,提供周围空域出现的接近飞机的交通态势和交通告警。
(5)决断告警(RA)显示功能——具有控制飞机升降、转弯等决断避险功能。
对出现碰撞危险的接近飞机,确定出本机合适的垂直机动飞行建议,通过显示器显示目标的符号、位置、颜色和数据标牌,以及VSI垂直速度指示画面,给出决断告警显示,以便本机与接近飞机之间达到或保持安全间隔距离。
(6)空对空协调功能——具有飞机之间的空对空协调功能。
对接近的存在碰撞危险且装有TCAS Ⅱ系统的飞机,本机将会与接近飞机建立一个机动协调数据联系,确保两机间的决断告警是协调和兼容的。
此外,机载防撞系统还应具备音响告警功能和升降速度指示功能。
就是说,在一定条件下,通过输出模拟语音给座舱音频系统和TCAS扬声器,向飞行人员提供交通和决断语音告警信息;防撞系统的显示器可以利用飞机静压,向飞行员提供飞机的升降速度指示。
四、构建机载防撞系统技术对策与措施国内运输机有机型多、制式不同、设备差异较大等特点,因此构建机载防撞系统应采用以下的对策与措施:(1)采用装备进口与改装研究相结合的方式进行系统构建按照民航总局和和有关部门的要求,运输机自主防撞系统采用TCASII系统。
从国内目前状况来看,由于国家没有正式立项研制TCAS系统,只是相关研制单位自筹资金开展了一些局部的预研工作,积累了一定的技术基础,短期内还无法研制出满足运输机加装要求的TCAS国产设备。
因此只能采取从国外进口装备,自行研究解决信号交联、设备装机、试验检验等问题,从而建立符合标准的机载防撞系统。
(2)合理选择系统设备根据运输机的特点,所选择的机载防撞系统设备必须满足:民航飞机大量使用并证明性能优良的货架产品;系统兼容性好、容易升级、扩张能力强,满足空管系统发展需要;系统可靠性、维修性好,满足长期使用维护需要;符合DO-185A 7.0规范;系统具有较高的性能价格比;进货渠道有保证,可提供长期技术服务;系统接口能力强,能够适应运输机机型多、机载设备品种多的状态,或减小对接口适配器的设计要求。
根据以上要求,在充分考虑不同运输机自身特点的基础上可灵活选择不同公司的产品。
(3)注重系统融合突出适配器的核心作用构建运输机自主防撞空管系统的关键是如何将定型的装备在多种类型飞机上实现系统融合。
根据需要TCAS系统应与飞机上的航姿系统、大气数据系统、无线电高度表、机内通话系统、飞行数据记录系统、空地状态、VOR、DME、Ⅲ型敌我识别器等信号交联。
而目前各型运输机机载设备大部分都属模拟信号设备,技术状态相对落后,无标准总线接口,且同型号飞机的技术状态也不统一,大都无法与国外生产的TCAS设备直接交联。
因此加装飞机机载设备提供的多路交联信号必须经过专门的信号处理后才能与TCAS设备交联,而研制综合信号适配器是最合理、最有效地解决方案。
针对不同飞机、不同设备、不同信号格式研制专用的适配器,突出其核心作用,实现载机与机载防撞系统的融合。
五、结束语随着空中交通流量的不断增大,空中危险接近的情况越来越多,机载防撞系统的必要性日益明显,坚定了人们装备自主防撞系统的决心,也加速了研制自主防撞系统的步伐。
飞机装备机载防撞系统后,飞行员能通过该设备监测本机周围半径大约40海里、上下3000m范围内的飞行动态,通过与遭遇飞机间的相互询问和应答以及数据分析,来确定航线是否有冲突。
在地面管制能力受限的情况下,飞行员可通过机载防撞系统及时应对,采取有效措施避免事故发生。
地面管制员也可通过机载防撞系统获取飞机的高度、航向、速度等有关飞行信息,从而扩展管制人员的监测范围,提升地面管制的指挥能力。