3、一个车身中会有多个CAN和多个LIN网Байду номын сангаас
4、LIN网络的的电平是对地参考,而CAN的电平则是双线参考的
如有问题,再提出来,我给你解答。
LIN和CAN主要在通信标准、数据传输数率、成本、使用领域等方面不一样,具体如下:9 w# U# Z" E; s) k; v5 c+ Z
一、LIN(Local Interconnect Network)
" `1 t9 e- r5 l$ y, S3 ]/ b* F基于上述特性,
CAN主要应用在重要的电子控制单元,如发动机、ABS、安全气囊等。
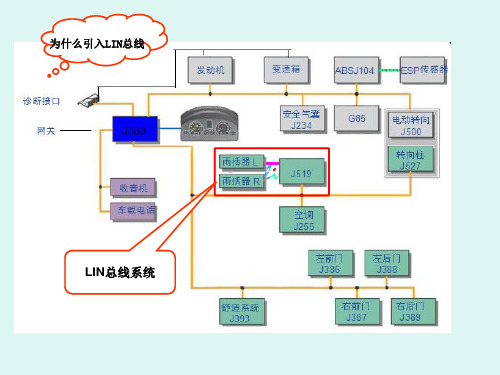
LIN总线是低速率串行通信总线,在汽车上基本应用于四门门窗,雨刮,天窗,后背门一些通讯不是很及时的系统。LIN只用一根线来通信,对于模块来说,还应有电源线(一般是常电),底线。主从式通信方式。通信比较及时的使用CAN,一般来说两根双绞线,进行串行通信,具体策略网上有很多。
/ W4 X. d# O' t0 ]7 T LIN 的主要特性是:0 f4 Z! a0 k5 A4 s9 ?
1、低成本基于通用UART 接口几乎所有微控制器都具备LIN 必需的硬件
- W, ]5 h9 H. ^" n& e2、传输速率最高可达20Kbit/s6 g" }' s) s, l% k9 I3 @
在这里你不需要对CAN或者LIN协议本身进行太多的研究,针对的问题我给你下面的解释:
1、CAN和LIN是两种完全不同的通讯机制,但是本身的目的都是为了传
2、CAN的数据传输速率相对LIN为高。但是成本更高,所以CAN多用在发送机转速,方向盘角度等方面。而LIN多用于车窗控制,座椅调整等方面
% b% @) {' U% |) ^ 6、可靠的错误处理和检错机制;
% [: W1 j) q. W5 R6 u. J 7、发送的信息遭到破坏后,可自动重发;
2 F: a* T3 j" Y4 |" Z, l8 E! J8 d 8、节点在错误严重的情况下具有自动退出总线的功能;
% m5 s4 I! J* i! Z1 B1 I* z; t2 i) n2 ` 9、报文不包含源地址或目标地址,仅用标志符来指示功能信息、优先级信息。
/ c2 }- }" `! W8 ?. W, G% v9 l 3、很远的数据传输距离(长达10Km);* k) H; y: }' m% s/ J2 P% e) @: L4 s
4、高速的数据传输速率(高达1Mbit/s);
! O, b- b: S3 e+ Y" Y5 d: S; f 5、可根据报文的ID决定接收或屏蔽该报文;
3、单主控器/多从设备模式无需仲裁机制, h: }4 P+ z+ b1 [, \
4、从节点不需晶振或陶瓷震荡器就能实现自同步节省了从设备的硬件成本
( A/ U& u: b( R" |4 Z5、保证信号传输的延迟时间) J. ^% L9 B2 |! z3 Q" X) ^% d
6、不需要改变LIN 从节点的硬件和软件就可以在网络上增加节点
1、低成本;
0 N3 ^. A9 u/ _ 2、极高的总线利用率;
/ c2 }- }" `! W8 ?. W, G% v9 l 3、很远的数据传输距离(长达10Km);* k) H; y: }' m% s/ J2 P% e) @: L4 s
4、高速的数据传输速率(高达1Mbit/s);
% m5 s4 I! J* i! Z1 B1 I* z; t2 i) n2 ` 9、报文不包含源地址或目标地址,仅用标志符来指示功能信息、优先级信息。
" `1 t9 e- r5 l$ y, S3 ]/ b* F基于上述特性,CAN主要应用在重要的电子控制单元,如发动机、ABS、安全气囊等。
0 N3 ^. A9 u/ _ 2、极高的总线利用率;
! O, b- b: S3 e+ Y" Y5 d: S; f 5、可根据报文的ID决定接收或屏蔽该报文;
% b% @) {' U% |) ^ 6、可靠的错误处理和检错机制;
% [: W1 j) q. W5 R6 u. J 7、发送的信息遭到破坏后,可自动重发;
2 F: a* T3 j" Y4 |" Z, l8 E! J8 d 8、节点在错误严重的情况下具有自动退出总线的功能;
4 M) F( F3 \4 ^. S8 @ 是一种低成本的串行通讯网络用于实现汽车中的分布式电子系统控制。LIN 的目标是为现有汽车网络(例如CAN 总线)提供辅助功能,因此LIN总线是一种辅助的总线网络。在不需要CAN 总线的带宽和多功能的场合比如智能传感器和制动装置之间的通讯使用LIN 总线可大大节省成本。
4 V4 C, H2 _0 b1 N7、通常一个LIN 网络上节点数目小于12 个共有64 个标志符! \: @- v4 e9 Y& j
典型的LIN 总线应用是汽车中的联合装配单元如门、方向盘、座椅、空调、照明灯、湿度传感器、交流发电机等。对于这些成本比较敏感的单元,LIN 可以使那些机械元件如智能传感器、制动器或光敏器件得到较广泛的使用。这些元件可以很容易的连接到汽车网络中并得到十分方便的维护和服务。在LIN 实现的系统中,通常将模拟信号量用数字信号量所替换,这将使总线性能优化。
2 j9 n: G g" m. w
" E- X& j4 X7 R4 I. G: b二、CAN(Controller Area Network)
5 ~" C- ~3 `- q, a; t CAN总线又称作汽车总线,其全称为“控制器局域网”。CAN总线是一种现场总线,CAN 的主要特性是:% M( n6 w1 D4 A8 \) P- H
4、LIN网络的的电平是对地参考,而CAN的电平则是双线参考的
如有问题,再提出来,我给你解答。
LIN和CAN主要在通信标准、数据传输数率、成本、使用领域等方面不一样,具体如下:9 w# U# Z" E; s) k; v5 c+ Z
一、LIN(Local Interconnect Network)
" `1 t9 e- r5 l$ y, S3 ]/ b* F基于上述特性,
CAN主要应用在重要的电子控制单元,如发动机、ABS、安全气囊等。
LIN总线是低速率串行通信总线,在汽车上基本应用于四门门窗,雨刮,天窗,后背门一些通讯不是很及时的系统。LIN只用一根线来通信,对于模块来说,还应有电源线(一般是常电),底线。主从式通信方式。通信比较及时的使用CAN,一般来说两根双绞线,进行串行通信,具体策略网上有很多。
/ W4 X. d# O' t0 ]7 T LIN 的主要特性是:0 f4 Z! a0 k5 A4 s9 ?
1、低成本基于通用UART 接口几乎所有微控制器都具备LIN 必需的硬件
- W, ]5 h9 H. ^" n& e2、传输速率最高可达20Kbit/s6 g" }' s) s, l% k9 I3 @
在这里你不需要对CAN或者LIN协议本身进行太多的研究,针对的问题我给你下面的解释:
1、CAN和LIN是两种完全不同的通讯机制,但是本身的目的都是为了传
2、CAN的数据传输速率相对LIN为高。但是成本更高,所以CAN多用在发送机转速,方向盘角度等方面。而LIN多用于车窗控制,座椅调整等方面
% b% @) {' U% |) ^ 6、可靠的错误处理和检错机制;
% [: W1 j) q. W5 R6 u. J 7、发送的信息遭到破坏后,可自动重发;
2 F: a* T3 j" Y4 |" Z, l8 E! J8 d 8、节点在错误严重的情况下具有自动退出总线的功能;
% m5 s4 I! J* i! Z1 B1 I* z; t2 i) n2 ` 9、报文不包含源地址或目标地址,仅用标志符来指示功能信息、优先级信息。
/ c2 }- }" `! W8 ?. W, G% v9 l 3、很远的数据传输距离(长达10Km);* k) H; y: }' m% s/ J2 P% e) @: L4 s
4、高速的数据传输速率(高达1Mbit/s);
! O, b- b: S3 e+ Y" Y5 d: S; f 5、可根据报文的ID决定接收或屏蔽该报文;
3、单主控器/多从设备模式无需仲裁机制, h: }4 P+ z+ b1 [, \
4、从节点不需晶振或陶瓷震荡器就能实现自同步节省了从设备的硬件成本
( A/ U& u: b( R" |4 Z5、保证信号传输的延迟时间) J. ^% L9 B2 |! z3 Q" X) ^% d
6、不需要改变LIN 从节点的硬件和软件就可以在网络上增加节点
1、低成本;
0 N3 ^. A9 u/ _ 2、极高的总线利用率;
/ c2 }- }" `! W8 ?. W, G% v9 l 3、很远的数据传输距离(长达10Km);* k) H; y: }' m% s/ J2 P% e) @: L4 s
4、高速的数据传输速率(高达1Mbit/s);
% m5 s4 I! J* i! Z1 B1 I* z; t2 i) n2 ` 9、报文不包含源地址或目标地址,仅用标志符来指示功能信息、优先级信息。
" `1 t9 e- r5 l$ y, S3 ]/ b* F基于上述特性,CAN主要应用在重要的电子控制单元,如发动机、ABS、安全气囊等。
0 N3 ^. A9 u/ _ 2、极高的总线利用率;
! O, b- b: S3 e+ Y" Y5 d: S; f 5、可根据报文的ID决定接收或屏蔽该报文;
% b% @) {' U% |) ^ 6、可靠的错误处理和检错机制;
% [: W1 j) q. W5 R6 u. J 7、发送的信息遭到破坏后,可自动重发;
2 F: a* T3 j" Y4 |" Z, l8 E! J8 d 8、节点在错误严重的情况下具有自动退出总线的功能;
4 M) F( F3 \4 ^. S8 @ 是一种低成本的串行通讯网络用于实现汽车中的分布式电子系统控制。LIN 的目标是为现有汽车网络(例如CAN 总线)提供辅助功能,因此LIN总线是一种辅助的总线网络。在不需要CAN 总线的带宽和多功能的场合比如智能传感器和制动装置之间的通讯使用LIN 总线可大大节省成本。
4 V4 C, H2 _0 b1 N7、通常一个LIN 网络上节点数目小于12 个共有64 个标志符! \: @- v4 e9 Y& j
典型的LIN 总线应用是汽车中的联合装配单元如门、方向盘、座椅、空调、照明灯、湿度传感器、交流发电机等。对于这些成本比较敏感的单元,LIN 可以使那些机械元件如智能传感器、制动器或光敏器件得到较广泛的使用。这些元件可以很容易的连接到汽车网络中并得到十分方便的维护和服务。在LIN 实现的系统中,通常将模拟信号量用数字信号量所替换,这将使总线性能优化。
2 j9 n: G g" m. w
" E- X& j4 X7 R4 I. G: b二、CAN(Controller Area Network)
5 ~" C- ~3 `- q, a; t CAN总线又称作汽车总线,其全称为“控制器局域网”。CAN总线是一种现场总线,CAN 的主要特性是:% M( n6 w1 D4 A8 \) P- H