微机原理课程设计报告利用DA芯片实现电机转速控制
- 格式:doc
- 大小:164.51 KB
- 文档页数:15

中南大学微机原理课程设计报告一、课程设计目的通过本次课程设计要掌握8088,8255,0809,0832,8279 等多种芯片使用的方法,灵活运用课本知识,加深所学的知识,对所学的相关芯片的原理、内部结构、使用方法等有更加深刻的了解,学会利用课本知识联系实际应用及编程。
同时并了解综合问题的程序设计掌握实时处理程序的编制和调试方法,掌握一般的设计步骤和流程,使我们以后搞设计时逻辑更加清晰。
二、课程设计任务本次课设选题为“模拟电压采集,直流电机控制”。
根据我自己对这个课题的理解,我认为这个课题应该实现以下的要求:基本要求:1、对模拟电压进行采集转换为数字信号,并实时显示。
2、用转换的到的数字信号再经数模转换,对直流电机进行控制。
拓展要求:1、通过发光二极管作为信号指示灯,实时的指示直流电机的工作状态是否正常。
2、建立报警电路,对电机非正常工作情况以及反转工作情况下进行报警。
三、设计思想与原理1、设计思想本次课设选题为“模拟电压采集,直流电机控制”,基本分为两大部分:模拟量采集的模数转换部分,以及电机控制中的数模转换部分。
而为了让模拟量的采集结果更加明显可察,将加入数码管显示模块,实时显示模拟量采集的大小情况。
与此同时,在选题基础上添加了直流电机工作状态指示灯电路和报警电路。
2、设计原理根据试验箱相关配置,取电位器0~5V 可调电压为模拟量输出模块,可线性调节输出。
取芯片ADC 0809 对采集到的模拟信号进行模数转换,将0~5V 的电压信号转为00~FF 的数字信号,并通过8279 键盘扫描输出模块进行相应的显示输出。
得到转换后的数字量之后,使用DAC0832 数模转换芯片进行数模转换,并将所得模拟量输出到直流电机控制端,进行电机驱动。
对于添加的模块,主要通过8255 芯片来实现,取8255 的PA0 口作为输出端口,连接试验箱上的开关量输入显示区的发光二极管。
对A口分别赋值01H (直流电机正向非正常工作)、02H(直流电机正常工作)、04H(直流电机反向非正常工作)并输入给开关量输入显示区的发光二极管,驱动前三个二极管在电机的三种工作状态下分别发光,从而实现指示灯电路。

评分:良微机原理课程设计—8位DA变换接口驱动直流电机学院:机电工程学院专业:自动化姓名:蔡如慧学号: 04103055指导老师:千博、董瑞军本课程设计的基本内容如下:通过课程设计加深对所学《微机原理》这门课的理解,理解CPU8088的基本功能和它最小系统的工作方式,熟练地掌握Protel99电路图设计的功能。
(一) 微处理器8088 最小系统1. 8088 最小系统电路图和线路板图2.�外围电路:译码器电路(74LS138)�时钟电路(8284)存储器电路(2762、6264)(二)接口应用线路基本内容有:1.用0809 组成8 位温度AD 变换接口电路2.用0832 组成8 位DA 变换接口电路驱动直流电机3.用8255 和8253 组成步进电机控制电路本次设计选作内容二目录第一章微型计算机的发展...................第二章电路总体功能介绍...................2.1 系统功能及实现方式2.2 系统框图第三章设计过程。
3.1 8088系统概述3.2 8284时钟电路(1片)3.3 8286双向数据收发器(1片)3.4 8282地址锁存器(3片)3.5 6264、2764构成最小系统存储器(各2片)3.6 8位DA变换接口驱动直流电机0830(1片)3.7 电路原理图及PCB图(见附页)第四章总结。
第一章微型计算机的发展一、微型计算机的发展历史第一台微型计算机—— 1974年,罗伯茨用8080微处理器装配了一种专供业余爱好者试验用的计算机“牛郎星”(Altair)。
第一台真正的微型计算机——1976年,乔布斯和沃兹尼克设计成功了他们的第一台微型计算机,装在一个木盒子里,它有一块较大的电路板,8KB的存储器,能发声,且可以显示高分辨率图形。
1977年,沃兹尼克设计了世界上第一台真正的个人计算机——AppleⅡ,并“追认”他们在“家酿计算机俱乐部”展示的那台机器为AppleⅠ。
微机原理及应用课程设计说明书设计题目:微型直流电机调速系统设计、系统功能要求分析1二、方案设计及其说明 (2)三、原理线路设计 (3)1.原理线路2.工作原理说明3.操作时序分析4.特点说明四、程序设计 (4)1.程序结构及流程2.程序算法分析3.关键程序段说明4.源程序清单五、....................................................... 系统调试及结论. (5)1.调试方法2.重点问题及解决方法3.运行结果及结论六、设计体会 (6)参考文献 (7)、系统功能要求分析此设计要求利用实验装置,设计一个直流电机控制系统的原理线路,编制应用程序,实现直流电机转速控制的功能,并且进一步可增加转速测量的功能。
系统功能具体要求及分析如下:(1)开始运行,电机停止:未按任何键之前,设定初值,使经DA0832转换后的电流为零,电机不转。
(2)按档调速功能:直流电机可有三个转速,分为一、二、三档,其中按下按键“一”电机在低速档运行;按下按键“二”电机在中速档运行;按下按键“三”电机在高速档运行。
(3)连续调速功能:按下“加速”键,编程控制DA0832输入数字量累加,直流电机可在原速基础上升速;按下“减速” 键,编程控制DA0832输入数字量自减,直流电机可相对原速减速。
(4)停止功能:设有停止键,控制电机的停止运行。
调节电位器改变DA0832 的基准电压,使得初值00H对应的输出电流为0,从而电机停止运行。
(5)改变转向功能:原理上,调节DAC0832勺基准电压,使得某一中间值对应转速为零,则在输入数字量大于此值时为正电压,电机正转;再输入数字量小于此值时为负电压,电极反转。
(6)测速功能:在一定时间内对霍尔元件产生的脉冲数计数,从而求得电机转速,并在数码管显示。
二、方案设计及其说明(一)硬件设计在硬件上,所用到的芯片主要有:CPU8086并行通信接口芯片8255A、可编程定时计数芯片8253、可编程中断控制器8259A以及键盘扫描显示芯片8279。

微机原理da实验报告实验介绍本实验是微机原理课程的实践环节,旨在通过组装和调试一个简单的微机原理实验板,加深对微机原理的理解和应用。
实验材料- 微机原理实验板x1- 电源线x1- 扁平电线x10- LED灯x5- 电阻x5- 开关x5- 七段数码管模块x1- 七段数码管驱动芯片x1- 逻辑开关芯片x1实验原理微机原理实验板是由微处理器、存储器、输入输出设备和系统总线等组成的微型计算机系统。
微机原理实验板通过连接各个器件和电路,利用微处理器来控制和操作其他设备,实现各种功能。
实验步骤1. 将微机原理实验板放在平整的工作台上,并且确定没有裸露的金属物体接触电路,以防止静电对电路的损害。
2. 使用扁平电线连接实验板和电源,注意正确连接正负极。
3. 将扁平电线连接到实验板上的开关模块,并确保开关处于关闭状态。
4. 连接LED灯和电阻,通过扁平电线将它们与开关模块连接起来。
5. 使用扁平电线将七段数码管模块和驱动芯片连接到实验板上的特定接口。
6. 检查所有连接并确保紧固可靠。
7. 打开电源,观察LED灯和七段数码管的显示效果。
8. 打开开关,观察LED灯是否亮起,七段数码管是否显示正确的数字。
实验结果经过实验,我们成功搭建了一个简单的微机原理实验板,并能够通过开关控制LED灯的亮灭和七段数码管的数字显示。
实验结果符合预期。
实验总结通过本次实验,我对微机原理有了更深入的理解。
通过组装和调试实验板,我掌握了实际操作微机原理的技能,对微型计算机系统的构成和工作原理有了更直观的认识。
通过观察实验结果,我进一步加深了对微处理器、存储器和输入输出设备的理解,并加深了对微机原理实验的兴趣。
实验心得微机原理实验板的搭建过程虽然简单,但要求仔细、耐心和细致。
在实验过程中,我发现了一些连接错误和接触不良的问题,通过排除故障并调整连接,最终解决了问题。
这让我懂得了在实际操作中需要仔细检查和耐心排查问题,以保证实验的顺利进行。
通过本次实验,我深刻认识到微机原理在现代计算机技术中的重要性,掌握了一些基本的电路组装和调试技巧,并体验了微机原理的实际应用。

实验8 D/A转换实验
实验时间2019年12月11日
实验类型■验证性□设计性□综合性
1. 实验目的
1.学习数/模转换的基本原理。
2.掌握DAC0832的使用方法。
2. 实验内容及过程(主要内容、操作步骤)
设计实验电路图实验线路并编写程序,实现D/A转换,要求产生锯齿波、脉冲波,并用示波器观察电压波形。
3. 测试数据及实验结果
4. 实验分析及总结(主要考察内容)
通过本次实验,我理解了模/数信号转换的基本原理,掌握了模/数信号转换芯片ADC0809的使用方法,了解了D/A的基本功能和实验电路,学到典型电路的接法和学会用延时产生方波和锯齿波的方法。
通过理解分析程序,自己对程序进行了一些总结和修改,并进行了验证,进一步掌握了微机接口的学习方法。
教师评阅
评价指标:实验目的、操作步骤、设计、算法、程序结构、实验结果、实验分析、实验总结。
课程设计报告题目步进电机正反转与调速控制系统的设计课程名称微机原理与应用院部名称机电工程学院专业电气工程与其自动化班级10电气1班学生姓名管志成学号 1004103027课程设计地点 C304课程设计学时 20指导教师国利金陵科技学院教务处制摘要步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件,具有快速启动能力,定位精度高,能够直接接受数字量,因此被广泛地应用于数字控制系统中,如数模转换装置、精确定位、计算机外围设备等,在现代控制领域起着非常重要的作用。
本设计基于Proteus 7.8设计环境,运用了8086 CPU芯片以与74273芯片、74244芯片和步进电机以与7位小功率驱动芯片ULN2003A、按钮、指示灯等辅助硬件电路,设计了步进电机正反转与调速系统。
绘制软件流程图,进行了软件设计并编写了源程序,最后对软硬件系统进行联合调试。
该步进电机的正反转与调速系统具有控制步进电机正反转的功能,还可以对步进电机进行调速,不同的按钮对应不同的速度,并且在没有速度按钮按下的时候,步进电机自动切换到停止状态。
关键词:步进电机;正反转;调速控制;ULN2003A芯片;8086微机系统目录一、概述1.1课程设计的目的 (4)1.2课程设计的要求 (4)二、总体设计方案与说明2.1 系统总体设计方案 (5)2.2系统工作框图 (5)三、系统硬件电路设计3.1 Intel 8086 微处理器的简介 (6)3.2 步进电机的原理 (7)3.3 ULN2003A的简介 (8)3.4 74154芯片简介 (9)3.5 74LS273芯片简介 (10)3.6 8086最小系统的设计 (11)3.7 步进电机与其驱动电路的设计 (12)3.8 电机状态显示电路的设计 (12)3.9 输入采样电路的设计 (13)3.10系统总电路图 (14)四、系统软件部分设计4.1 系统流程图 (15)4.2 系统软件源程序 (16)4.2.1电机绕组通电顺序设定 (16)4.2.2 延时子程序设计 (16)4.2.3 汇编源程序与说明 (16)五、总结5.1 系统软硬件的联合调试 (21)5.2 问题分析和解决方案 (23)5.3 心得与体会 (23)六、参考文献 (23)附录:总电路图 (25)一、概述1.1 课程设计的目的通过本课程设计,使学生掌握控制系统设计的一般步骤,掌握系统总体控制方案的设计方法。

程序代码/*-------------------------------------------------- 名称:A/D、D/A转换控制直流电机转速编写:人言者007日期:2013.5.26说明:输入的电压模拟量通过ADC0808转换为数字量再输入单片机P2口,再由单片机P0口输出给DAC0832转换为模拟量电压驱动直流电机,以电机转速可以看出电压的大小。
---------------------------------------------------*/ #include<reg52.h>#define uchar unsigned char#define uint unsigned intuchar temp;sbit clk=P3^3;sbit EOC=P3^2;sbit OE= P3^1;sbit st= P3^0; //DAC0808各引脚定义void timer0init(){TMOD=0x02; //设置定时器0为工作方式2 自动重装TH0=0x05; //高八位初值寄存器装初值TL0=0x05; //低八位计数器装初值EA=1; //总中断开ET0=1; //开定时器中断TR0=1; //启动定时器}void main(){timer0init();while(1){st=1; //打开ADC00808启动转换st=0; //关闭ADC00808while(!EOC);//等待转换完成OE=1; //打开输出temp=P2; //AD完赋值、读取OE=0; //关闭输出,停止读取P0=temp;}}void timer0() interrupt 1{clk=~clk;}硬件仿真(protues)。

实验课题:直流电机调速控制实验内容:本实验完成的是一个实现对直流电机转速调节的应用。
编写实验程序,用ADC0809完成模拟信号到数字信号的转换。
输入模拟信号有A/D转换单元可调电位器提供的0~5V,将其转换后的数字信号读入累加器,做为控制电机的给定转速。
用8255的B口作为直流电机的控制信号输出口,通过对电机转速反馈量的运算,调节控制信号,达到控制电机匀速转动的的作用。
并将累加器中给定的转速和当前测量转速显示在屏幕上。
再通过LED灯显示出转速的大小变化。
实验目的:(1)学习掌握模/数信号转换的基本原理。
(2)掌握的ADC0809、8255芯片的使用方法。
(3)学习PC系统中扩展简单I/O接口的方法。
(4)了解实现直流电机转速调节的基本方法。
实验要求:利用微机接口实验系统的硬件资源,运用汇编语言设计实现直流电机的调速控制功能。
基本功能要求:1、利用A/D转换方式实现模拟量给定信号的采样;2、实现PWM方式直流电机速度调节;3、LED灯显示当前直流电机速度状态。
实验设备:(1)硬件要求: PC微机一台、TD-PIT实验系统一套(2)软件要求:唐都编程软件,tdpit编程软件,“轻松编程”软件实验原理:各芯片的功能简介:(1)8255的基本输出接口电路:并行接口是以数据的字节为单位与I/O设备或被控制对象之间传递信息,CPU 和接口之间的数据传递总是并行的,即可以同时进行传递8位,16位,32位等。
8255可编程外围接口芯片是具有A、B、C三个并行接口,+5V单电源供电,能在以下三种方式下工作:方式0—基本输入/出方式、方式1—选通输入/出方式、方式2—双向选通工作方式。
8255的内部结构图和引脚图如下:本实验利用8255的A口作为输出口,控制8个单色LED灯,来实现电机转速的大小显示。
(2)转速调节原理:* PWM的占空比决定输出到直流电机的平均电压.PWM不是调节电流的.PWM的意思是脉宽调节,也就是调节方波高电平和低电平的时间比,一个20%占空比波形,会有20%的高电平时间和80%的低电平时间,而一个60%占空比的波形则具有60%的高电平时间和40%的低电平时间,占空比越大,高电平时间越长,则输出的脉冲幅度越高,即电压越高.如果占空比为0%,那么高电平时间为0,则没有电压输出.如果占空比为100%,那么输出全部电压.所以通过调节占空比,可以实现调节输出电压的目的,而且输出电压可以无级连续调节.在使用PWM控制的直流无刷电动机中,PWM控制有两种方式:1.使用PWM信号,控制三极管的导通时间,导通的时间越长,那么做功的时间越长,电机的转速就越高2.使用PWM控制信号控制三极管导通时间,改变控制电压高低来实现** 利用实验平台上8255的PB0产生脉冲信号作为控制量,经驱动电路驱动电机运转。
微型计算机控制技术课程设计直流电机转速闭环控制(单片机)学院名称:自动化学院专业:自动化专业班级: *****学号: 2011**** 姓名: ****学号: 2011**** 姓名: *******学号: 2011**** 姓名: ******学号: 2011**** 姓名: ****评分:教师: ****摘要在运动控制系统中,电机转速控制占有至关重要的作用,其控制算法和手段有很多,模拟PID控制是最早发展起来的控制策略之一,长期以来形成了典型的结构,并且参数整定方便,能够满足一般控制的要求,但由于在模拟PID控制系统中,参数一旦整定好后,在整个控制过程中都是固定不变的,而在实际中,由于现场的系统参数、温度等条件发生变化,使系统很难达到最佳的控制效果,因此采用模拟PID控制器难以获得满意的控制效果。
随着计算机技术与智能控制理论的发展,数字PID技术渐渐发展起来,它不仅能够实现模拟PID所完成的控制任务,而且具备控制算法灵活、可靠性高等优点,应用面越来越广。
本设计以上面提到的数字PID为基本控制算法,以51单片机为控制核心,产生占空比受数字PID算法控制的PWM脉冲实现对直流电机转速的控制。
同时利用霍尔传感器将电机速度转换成脉冲频率反馈到单片机中,实现转速闭环控制,达到跟踪校正速度漂移的目的。
关键字:计算机技术、运动控制、PID目录摘要 (I)目录 (II)序言...................................................................................................................................... - 1 - 1 设计原理.................................................................................................................................. - 2 -1.1 单片机直流电机调速.................................................................................................. - 2 -1.2 PWM波的产生............................................................................................................... - 2 -1.21定时器产生pwm ................................................................................................ - 2 -1.22 注意事项............................................................................................................ - 2 -1.3 系统控制原理.............................................................................................................. - 3 -2 硬件电路设计.......................................................................................................................... -3 -2.1 系统总结构................................................................................................................ - 3 -2.2 硬件电路接线.............................................................................................................. - 4 -2.3单片机........................................................................................................................... - 5 -2.4 直流电机驱动电路...................................................................................................... - 7 -2.5 霍尔传感器测速电路.................................................................................................. - 7 -3 软件设计.................................................................................................................................. - 7 -3.1 主程序设计.................................................................................................................. - 7 -3.2中断计时器设计流程图............................................................................................... - 9 -4 设计分析................................................................................................................................ - 10 - 5心得体会................................................................................................................................. - 11 -5.1心得体会().............................................................................................................. - 11 -5.2心得体会().............................................................................................................. - 11 -5.3 心得体会()............................................................................................................. - 12 -5.4 心得体会()............................................................................................................. - 13 -6 参考文献................................................................................................................................ - 14 -7 附录................................................................................................................................ - 15 -序言微型计算机控制技术在工业领域中得到了广泛的应用。
计算机系综合性实验实验报告课程名称微机原理与接口技术A 实验学期 2010 至 2011 学年第 2 学期学生所在系部电子信息工程系专业班级学生姓名学号任课教师实验成绩计算机系制《小直流电机转速控制》课程综合性实验报告实验题目小直流电机转速控制实验一、实验目的1、了解计算机控制直流电机原理2、掌握直流电机正转反转设置方法。
3、掌握前向通道各部件工作原理及程序控制原理。
二、设备与环境DAC08328255并行接口芯片98系统微机。
三、实验原理简述小直流电机的转速是由Ub输出脉冲的占空比来决定的,正向占空比越大转速越快,反之越慢。
见下面图例:在本实验中,模拟量输出Ub为双极性,当输入数字量小于80H时输出为负,输入等于80H 时为0V,输入大于80H时输出为正。
因而本实验中,DAC0832输入数字量只有2个(80H 和FFH),通过不同的延迟时间达到改变小电机转速的目的四、实验内容1、按图55线路接线。
DAC0832的CS接290H~297H,Ub接DJ插孔。
8255 CS接288H~28FH。
2、编程利用DAC0832输出一串脉冲,经放大后驱动小直流电机,利用开关K0~K5控制改变输出脉冲的电平及持续时间,达到使电机加速,减速之目的。
五、实验流程设计六、程序段分析(1)数据段DA TA SEGMENTIoport equ 0c8ooh-0280hPORT1 EQU ioport+290HPORT2 EQU ioport+28BHPORT3 EQU ioport+28AHBUF1 DW ?BUF2 DW ?DA TA ENDS功能说明:DATA 是段的名字,DATA ENDS段程序的结束。
数据定义伪指令用来为数据分配存储单元,建立变量与存储单元之间的联系。
dw定义类型属性为字,?表示预留空间,内容不定。
(2)代码段CODE SEGMENTASSUME CS:CODE,DS:DA TACODE是代码段,一个汇编语言程序中,代码段是不可缺少的,其他段可视具体情况而定。

北华大学课程设计报告课程名称:微型计算机原理与接口技术课设题目:微机控制直流脉宽调速系统设计班级:通信10-1学号:16姓名:孙鹏指导教师:张锡鹤目录一、设计题目介绍..................................................... - 2 -二、调速系统框图设计 ............................................. - 3 -三、系统相关芯片介绍 ............................................. - 4 -四、A/D转换设计..................................................... - 5 -五、显示和报警设计................................................. - 6 -六、系统软件设计..................................................... - 8 -七、实习心得.......................................................... - 13 - 参考文献 ................................................................. - 14 -一、设计题目介绍设计题目:微机控制直流脉宽调速系统设计设计目的1)掌握8088CPU最小总线模式下设计“计算机控制系统”软件的方法;2)掌握微机控制直流脉宽调速系统的设计方法和思想;3)掌握一般性系统的设计流程与调试技巧。
设计要求1)根据设计的技术要求,制定总体设计方案;2)绘制软件流程图——总图;3)绘制软件各模块流程图;4)编写源程序;5)上机用Emu8086软件调试程序;6)编写设计报告。

应用DAC0832单片机控制小直流电机转速的设计《微机原理、汇编与接口技术》课程设计报告书课程设计报告书2009~2010学年第1学期学院: ****课程: 微机原理与应用姓名: **学号: ***专业班级: 自动化***指导教师: ***一、设计题目:8086微机应用DAC0832控制小直流电机转速的设计二、设计目的:1《微机原理、汇编与接口技术》课程设计报告书巩固“微机原理”课程学过的知识,加强理论与实践的联系。
通过本课程设计,使学生初步了解8086系列微机系统的硬件设备,学会8086系列编程指令的基本功能。
三、设计内容与要求:1、内容采用8086CPU构建微机系统,扩展4K EPROM和2K静态RAM作为存储系统,采用最小模式,利用DAC0832,编制程序输出双极性模拟电压驱动小直流电机,使电机能以不同转速正反向运行。
2、设计要求(1)、查阅文献资料,了解DAC0832双极性电压输出控制原理,并在报告书中综述之。
(2)、设计系统的硬件连接原理图,对原理图加以说明。
(3)、画出程序框图,并说明。
(4)、编写应用程序,并注解程序。
(5)、提交课程设计说明书。
四、设计资料与参数:1、电机转速由8个按钮开关以补码形式给定输入,并以发光二极管形式显示出来。
电机的转速变化范围为反向500 rpm,正向500rpm;2、DAC0832双极性电压输出控制原理,控制小直流电机以不同转速运行。
3、小直流电机额定电压为5V。
电源:5V由外部提供。
五、详细设计:(一)DAC0832双极性电压输出控制原理2《微机原理、汇编与接口技术》课程设计报告书DAC0832是20引脚双列直插式芯片,内部结构和引脚信号如图所示。
图1 DAC 0832的内部结构和引脚在某些微机控制系统中,要求D/A的输出电压是双极性的。
例如要求输出(-5,+5)V。
在这种情况下,D/A的输出电路要作相应的变化。
图1就是DA0832双极性输出电路实例。
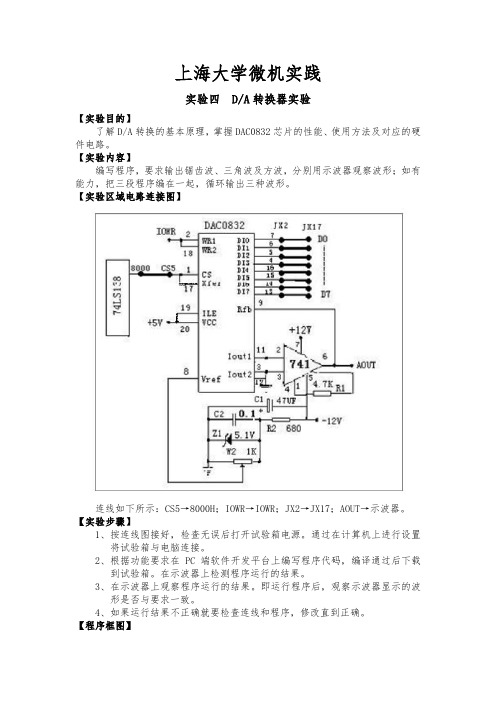
上海大学微机实践实验四 D/A转换器实验【实验目的】了解D/A转换的基本原理,掌握DAC0832芯片的性能、使用方法及对应的硬件电路。
【实验内容】编写程序,要求输出锯齿波、三角波及方波,分别用示波器观察波形;如有能力,把三段程序编在一起,循环输出三种波形。
【实验区域电路连接图】连线如下所示:CS5→8000H;IOWR→IOWR;JX2→JX17;AOUT→示波器。
【实验步骤】1、按连线图接好,检查无误后打开试验箱电源。
通过在计算机上进行设置将试验箱与电脑连接。
2、根据功能要求在 PC 端软件开发平台上编写程序代码,编译通过后下载到试验箱。
在示波器上检测程序运行的结果。
3、在示波器上观察程序运行的结果。
即运行程序后,观察示波器显示的波形是否与要求一致。
4、如果运行结果不正确就要检查连线和程序,修改直到正确。
【程序框图】【程序代码】//示波器输出方波CODE SEGMENTASSUME CS:CODEORG 1200HSTART:MOV DX,8000HMOV AL,00HLOOP1:OUT DX,AL //将AL的值输出给DX,即地址8000H CALL DELAY //调用延时程序XOR AL,0FFH //AL中数据取反JMP LOOP1 //跳转到LOOP1DELAY:MOV BX,0FFH //对BX赋值为0LOOP2:DEC BX //BX的值自减1JNZ LOOP2 //结果不为0时,跳转到LOOP2RETCODE ENDSEND START//示波器输入锯齿波CODE SEGMENTASSUME CS:CODEORG 1200HSTART:MOV DX,8000HMOV AL,00HLOOP1:OUT DX,AL //将AL的值输出给DX,即地址8000HNOP //等待INC AL //AL 的值自增1JMP LOOP1 //跳转到LOOP1,循环CODE ENDSEND START//示波器输入三角波CODE SEGMENTASSUME CS:CODEORG 1200HSTART:MOV DX,8000HMOV AL,00HLOOP1:OUT DX,AL //将AL 的值输出给DX ,即地址8000HINC AL //AL 的值自增1CMP AL,0FFH //比较AL 的值和0FFH (即255)的大小JZ LOOP2 //若结果相等,则跳转到LOOP2;否则,继续向下执行JMP LOOP1 //即当AL 的值不等于0FFH 时跳转到LOOP1LOOP2:OUT DX,AL //将AL 的值输出给DX ,即地址8000HDEC AL //AL 的值自减1NOP //等待JZ LOOP1 //当AL 的值减为0时,跳转到LOOP1;否则,继续向下执行JMP LOOP2 //即当AL 的值不等于0时跳转到LOOP2CODE ENDSEND START方波t/mst/ms2.1ms 锯齿波1.2ms2.72V-2.72V5.44VU/V U/V【问答题】1、DAC 产生波形的频率如何调节?频率上限的限制取决于那些因素?答:① ⑴方波:方波的周期长短由延时程序控制,因此只要调节延时程序就可 以实现改变方波的频率。
《微机应用系统设计》课程设计报告题目:直流电机速度控制器专业班级:电子信息科学与技术13101 班设计学生:xxxxxx指导教师:xxx完成时间:2015年 6 月27 日湖南文理学院物理与电子科学学院源程序:.MODEL SMALL.8086.STACK.CODE.STARTUPAGAIN: CALL KEYPROCMOV AL,KEYMOV BX,OFFSET SITUATIONXLATMOV DX,0200HOUT DX,ALJMP AGAINKEYPROC PROCMOV AL,00HMOV DX,0000HOUT DX,ALMOV DX,0400HIN AL,DXAND AL,0FHCMP AL,0FHJNZ SCANRETSCAN: CALL DELAYPROC: MOV CL,0FEHMOV HANGNUM,4FROW: MOV AL,CLMOV DX,0000HOUT DX,ALMOV DX,0400HIN AL,DXAND AL,0FHCMP AL,0FHJNZ FCOLROL CL,1DEC HANGNUMJNZ FROWRETFCOL: MOV AH,CLMOV SI,OFFSET TABLE+15*2 MOV CX,16LOP0: CMP AX,[SI]JZ KEYPRODEC SIDEC SILOOP LOP0RETKEYPRO: MOV BX,OFFSET TABLEX DEC CLMOV AL,CLXLATMOV KEY,ALRETKEYPROC ENDPDELAY PROC NEARPUSH BXPUSH CXMOV BX,1DEL1: MOV CX,5882DEL2: LOOP DEL2DEC BXJNZ DEL1POP CXPOP BXRETDELAY ENDP.DATAKEY DB 0HANGNUM DB 4situation db 0,28,56,84,112,140,168,196,224,255db 0,0,0,0,0,0TABLE DW 0FE0EHDW 0FE0DHDW 0FE0BHDW 0FE07HDW 0FD0EHDW 0FD0DHDW 0FD0BHDW 0FD07HDW 0FB0EHDW 0FB0DHDW 0FB0BHDW 0FB07HDW 0F70EHDW 0F70DHDW 0F70BHDW 0F707HTABLEX DB 7,8,9,0AH,4,5,6,0BH,1,2,3,0CH,0,0DH,0EH,0FH SIT_END=$END设计总结:通过本次设计,让我们很好的锻炼了理论联系实际,与具体项目、课题相结合开发、设计产品的能力。
《微机综合实践》实验报告选题:小直流电机转速控制及测速实验程序语言:C/C++姓名:学号:同组伙伴:班级:班实验环节任务和要求:实验七——小直流电机转速控制及测速实验,要求使用8253,8255芯片以及DAC0832芯片组成连接电路,实现对小直流电机转速的控制及转速的测量的功能。
利用开关K0—K6进行转速的设定,经过可编程并行接口芯片8253进行芯片的读写,通过可编程计数器8253进行转速的设定(改变转速和占空比)和转速的计数。
利用数模转换芯片DAC0832进行数字信号和模拟信号之间的转换,使得小直流电机可以按照设定的转速来运转。
在连接好电路以后,采用C语言或C++进行编程,使整个电路可以实现所要求的功能,包括硬件的检测,芯片的初始化,转速的控制以及小直流电机转速的测量等。
实验原理:小直流电机的转速是由输出脉冲的占空比(PWM: Pulse width modulation )来决定的,正向占空比越大转速越快,反之越慢。
8253是一个三通道16比特的可编程定时计数器,他的最高计数频率可达2MHz,主要包括三个计数器通道,一个控制寄存器,数据总线缓冲器及读/写逻辑电路。
8253共有六种不同的工作方式,在不同的方式下,计数过程的启动方式、out端的输出波形都不一样。
本实验采用的是方式0和方式3。
其中方式0为软件启动不自动重复计数的方式,该方式在第一个写信号WR有效时向计数器写入控制字CW,之后其输出端OUT就变低电平,在第二个WR有效时装入计数初值,然后经过一个CLK信号的上升沿和下降沿,初值进入计数器。
当计数减到零——计数结束后,OUT输出变为高电平。
8253的方式3是方波发生器,在这个方式下,计时器既可以用软件启动,也可以用硬件启动。
方式3也可以自动重复计数。
只是计数到N/2时,OUT变为低,再接着计数到0时,OUT又变为高,并开始新一轮计数。
试验中利用方式3产生一定频率的方波信号,并且将方波信号作为基准信号与另一信号相比较,进行转速的测量。

课程名称计算机控制技术数据采集器设计学院信息工程学院专业班级 09应电(1)学号 3109003049 姓名黎青所2012年3 月26 日D/A转换一、报告内容设计一块D/A电路,该电路通过微机系统的I/O扩展槽与微机系统连接,利用D/A0832芯片的双缓冲工作方式将数字量转换成模拟量,具有对0~5V的模拟电压输出能力。
选用芯片:DAC0832等。
三、D/A0832芯片及数模转换原理D/A转换器的作用是将数字量转换为相应的模拟量。
数字量由二进制位组成,每个二进制的权,要把数字量转换为相应的模拟量电压(多数情况需要转换后的模拟信号以电压的形式输出),需要先把数字量的每一位上的代码按权转换成为对应的模拟电流,再把模拟电流相加,最后由运算放大器将其转变成模拟电压。
数字量是由一位一位的数字构成的,每一个数位都代表一定的权。
为了把一个数字量变成模拟量,必须把每一位上的代码按照权来转换为对应的模拟量,再把各模拟量相加,这样,得到的总的模拟量对应于给定的数据。
在集成电路中,通常采用T型网络实现数字量向模拟电流的转换,再利用运算放大器来完成模拟电流到模拟电压的转换。
所以,要把一个数字量变为模拟电压,实际上需要两个环节:即先把数字量变为模拟电流,这是由D/A转换器完成的;再将模拟电流变为模拟电压,这是由运算放大器完成的。
D/A转换器可以视为微机的一种外围设备,实现D/A转换器和微机接口技术的关键是数据锁存问题。
当CPU向D/A转换器输出一个数据时,这个数据在数据总线上只持续很短的时间,必须有数据锁存器锁住这个数据,才能得到持续稳定的模拟量输出。
有些D/A转换器芯片本身不带锁存器,此时74LS273芯片以及可编程的并行I/O接口芯片8255A均可作为D/A转换的数据锁存器,有些D/A转换器芯片本身带有锁存器。
四、工作过程1、将数据写入输入寄存器2、将输入寄存器的内容写入DAC寄存器即:使WR1为低电平,CS为低电平而ILE为高电平,这样,输入寄存器的锁存信号处于无效状态,待转换的数据被写入输入寄存器;WR2和XFER端输入一个负脉冲,从而使DAC寄存器工作在锁存状态。

目录一、概述 (3)1.1试验目的及要求 (3)1.2课程设计所用软硬件 (3)二、实验过程及体会 (3)2.1课程设计进行过程及步骤 (3)2.2实验总结及体会 .................. 1错误!未定义书签。
2.3实验分工 (15)2.4参考资料 (16)一、概述1.1目的及要求利用D/A0832芯片实现电机转速控制,要求可以通过输入选择电机转速的档位,并且用七段数码管显示电机档位。
1.2课程设计所用软硬件PC机、Proteus软件二、实验过程及体会2.1课程设计过程及步骤(1)设计思路本次试验要求设计利用D/A芯片实现电机转速控制,因此要用到电机与D/AC0832芯片,要控制电机转速,因此我们选择按键控制电机转速,初步准备设计电机有4个档位,全部用按键控制,按下1键表示一档,按下2键表示二档,按下3键表示三档,按下4键表示四档,其中一档转速最快,然后依次递减。
因此,总的设计思路是用8086输出各种控制信号,用可编程并行接口芯片8255扫描键盘,当有有限按键按下时有8255输出数字信号到D/AC0832,然后由D/AC0832将数字信号转换为模拟信号,输出到电机,再有8255输出数字量到七段数码管,用七段数码管显示按下的档位,即电机转速。
实验流程如下:(2)由设计思路在Proteus上画出电路图,译码电路如下:8255控制电路如下:键盘如下:D/AC0832数模转换电路如下:MOV AL,00HMOV DX,BBOUT DX,ALBEG:CALL INPUTCMP AL,1JZ ONECMP AL,2JZ TWOCMP AL,3JZ THREECMP AL,4JZ FOURJMP BEGONE:MOV BX,OFFSET STRING XLATMOV DX,AAOUT DX,ALMOV AL,0FFHMOV DX,BBOUT DX,ALCALL DELAYJMP BEGTWO:MOV BX,OFFSET STRING XLATMOV DX,AAOUT DX,ALMOV AL,0C0HMOV DX,BBOUT DX,ALCALL DELAYJMP BEGTHREE:MOV BX,OFFSET STRING XLATMOV DX,AAOUT DX,ALMOV AL,80HMOV DX,BBOUT DX,ALCALL DELAYJMP BEGFOUR:MOV BX,OFFSET STRING XLATMOV DX,AAOUT DX,ALMOV AL,40HMOV DX,BBOUT DX,ALCALL DELAYJMP BEGINPUT PROC NEARMOV DX,CCMOV AL,0OUT DX,ALNO_KEY:IN AL,DXAND AL,0FHCMP AL,0FHJZ NO_KEYMOV DX,CCIN AL,DXAND AL,0FHCMP AL,0FHJZ NO_KEYMOV BH,0MOV SI,4MOV CH,11101111B AGAIN0:MOV AL,CHMOV DX,CCOUT DX,ALIN AL,DXMOV DL,0 AGAIN:TEST AL,01HJZ DONESHR AL,1INC DLCMP DL,4JNZ AGAINROL CH,1INC BHDEC SICMP SI,0JNZ AGAIN0DONE:SAL DL,1SAL DL,1ADD DL,BHMOV AL,DLRETINPUT ENDPDELAY PROCPUSH CXMOV CX,125LOOP $POP CXRETDELAY ENDPCODE ENDSEND START当按下按键1时,如下:可以看到七段数码管显示档位1以及电机转动,电机转速可以达到195转/秒,当按下按键2时,七段数码管显示电路以及电机转动如下: 按下按键三时,显示如下: 当按下3键时,显示如下:01234567D R 01ESET S PA04PA13PA22PA31PA440PA539PA638PA737PB018PB119PB220PB321PB422PB523PB624PB725PC014PC115PC216PC317PC413PC512PC611PC71045AACE=1+195+164SET A CE=1按下Proteus右上角的的ARES,一键切换到生成PCB板模式,将所有器件排列整齐,采用自动布线技术,生成PCB 板如下:2.2实验总结及体会本次实验是以小组形式来完成课程设计,因此有利于培养我们的团队精神,也有利于我们将课堂上所学的理论知识运用到实际中去,当我们自己动手将电机功能实现的时候,对我们是莫大的鼓舞,也激发了我们对于微机原理的兴趣。
目录
一、概述 (3)
1.1试验目的及要求 (3)
1.2课程设计所用软硬件 (3)
二、实验过程及体会 (3)
2.1课程设计进行过程及步骤 (3)
2.2实验总结及体会 ............... 1错误!未定义书签。
2.3实验分工 (15)
2.4参考资料 (16)
一、概述
1.1目的及要求
利用D/A0832芯片实现电机转速控制,要求可以通过输入选择电机转速的档位,并且用七段数码管显示电机档位。
1.2课程设计所用软硬件
PC机、Proteus软件
二、实验过程及体会
2.1课程设计过程及步骤
(1)设计思路
本次试验要求设计利用D/A芯片实现电机转速控制,因此要用到电机与D/AC0832芯片,要控制电机转速,因此我们选择按键控制电机转速,初步准备设计电机有4个档位,全部用按键控制,按下1键表示一档,按下2键表示二档,按下3键表示三档,按下4键表示四档,其中一档转速最快,然后依次递减。
因此,总的设计思路是用8086输出各种控制信号,用可编程并行接口芯片8255扫描键盘,当有有限按键按下时有8255输出数字信号到D/AC0832,然后由D/AC0832将数字信号转换为模拟信号,输出到电机,再有8255输出数字量到七段数码管,用七段数码管显示按下的档位,即电机转速。
实验流程如下:
(2)由设计思路在Proteus上画出电路图,译码电路如下:
8255控制电路如下:
键盘如下:
D/AC0832数模转换电路如下:
MOV AL,00H
MOV DX,BB
OUT DX,AL
BEG:
CALL INPUT
CMP AL,1
JZ ONE
CMP AL,2
JZ TWO
CMP AL,3
JZ THREE
CMP AL,4
JZ FOUR
JMP BEG
ONE:
MOV BX,OFFSET STRING XLAT
MOV DX,AA
OUT DX,AL
MOV AL,0FFH
MOV DX,BB
OUT DX,AL
CALL DELAY
JMP BEG
TWO:
MOV BX,OFFSET STRING XLAT
MOV DX,AA
OUT DX,AL
MOV AL,0C0H
MOV DX,BB
OUT DX,AL
CALL DELAY
JMP BEG
THREE:
MOV BX,OFFSET STRING XLAT
MOV DX,AA
OUT DX,AL
MOV AL,80H
MOV DX,BB
OUT DX,AL
CALL DELAY
JMP BEG
FOUR:
MOV BX,OFFSET STRING XLAT
MOV DX,AA
OUT DX,AL
MOV AL,40H
MOV DX,BB
OUT DX,AL
CALL DELAY
JMP BEG
INPUT PROC NEAR
MOV DX,CC
MOV AL,0
OUT DX,AL
NO_KEY:
IN AL,DX
AND AL,0FH
CMP AL,0FH
JZ NO_KEY
MOV DX,CC
IN AL,DX
AND AL,0FH
CMP AL,0FH
JZ NO_KEY
MOV BH,0
MOV SI,4
MOV CH,11101111B AGAIN0:
MOV AL,CH
MOV DX,CC
OUT DX,AL
IN AL,DX
MOV DL,0 AGAIN:
TEST AL,01H
JZ DONE
SHR AL,1
INC DL
CMP DL,4
JNZ AGAIN
ROL CH,1
INC BH
DEC SI
CMP SI,0
JNZ AGAIN0
DONE:
SAL DL,1
SAL DL,1
ADD DL,BH
MOV AL,DL
RET
INPUT ENDP
DELAY PROC
PUSH CX
MOV CX,125
LOOP $
POP CX
RET
DELAY ENDP
CODE ENDS
END START
当按下按键1时,如下:
按下Proteus右上角的的ARES,一键切换到生成PCB板模式,将所有器件排列整齐,采用自动布线技术,生成PCB 板如下:
2.2实验总结及体会
本次实验是以小组形式来完成课程设计,因此有利于培养我们的团队精神,也有利于我们将课堂上所学的理论知识
运用到实际中去,当我们自己动手将电机功能实现的时候,对我们是莫大的鼓舞,也激发了我们对于微机原理的兴趣。
实验前,我们小组四名成员进行了严格的分工,这对于我们成功完成这次实验很有帮助。
当然,实验中,我们也遇到了各种各样的困难,比如键盘的设计比较复杂,刚开始我们还不是很懂,后来通过查找资料,才明白键盘的工作原理。
还有,本次实验要用到电机,我们了解到,电机有步进电机,直流电机等等,因为本次实验只用实现电机转速控制,所以我们选择了简单的直流电机,并且电机上面带电机转速显示,有利于我们对电机的控制。
当然,我们也遇到了非常困难的问题,比如,数模转换电路输出电压到电机上面,电机转速很慢,所以我们就请教了老师,原来电机输入电阻很大,而工作电压很小,因此我们加入了三极管放大电路,这样也大大提高了数模转换电路的带负载能力,成功实现的对电机转速的控制。
本次实验我们觉得实验中心是可编程并行接口芯片8255,可见,8255在实际中还是很有作用的。
2.3实验分工
本次实验我么小组有四名成员,作为组长,花修春同学在实验前对各位成员进行了分工,其中,周轩轩同学负责查找资料,解决我们实验中遇到的各种困难;孙连俊同学负责代码的编写;花修春同学和王杰同学负责硬件电路的搭建及最后调试。
我们觉得,实验分工是正确的,这样才能把各个小组成员积极性调动起来,促进实验的完成。
2.4参考资料
[1] 顾晖梁惺彦微机原理与接口技术——基于8086和Proteus仿真北京:电子工业出版社
[2]徐晨,陈继红,王春明,徐慧编著微机原理及应用北京:高等教育出版社,2004
[3]何小海,严华主编微机原理与接口技术北京:科学出版社2006
[4]参考网站:Baidu,百度文库,百度知道,Google,中国电子电路网等等。