基于ARM的GPS地面目标跟踪及报警系统的设计,GPS,定位.
- 格式:doc
- 大小:29.50 KB
- 文档页数:4
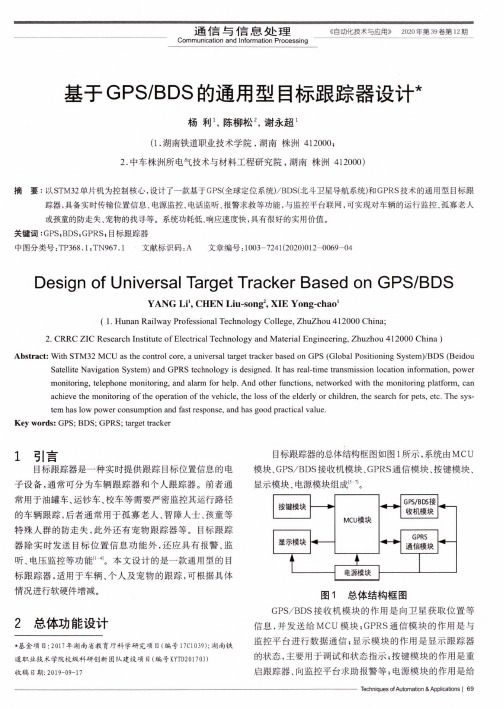
Communication and Information Processing基于GPS/BDS 的通用型目标跟踪器设计**基金项目:2017年湖南省教育厅科学研究项目(编号17C1039);湖南铁 道职业技术学院校级科研创新团队建设项目(编号KYTD201703) 收稿日期:2019-09-17杨利1,陈柳松2,谢永超「(1.湖南铁道职业技术学院,湖南株洲412000;2.中车株洲所电气技术与材料工程研究院,湖南株洲412000)摘要:以STM32单片机为控制核心,设计了一款基于GPS (全球定位系统)/BDS (北斗卫星导航系统)和GPRS 技术的通用型目标跟踪器,具备实时传输位置信息、电源监控、电话监听、报警求救等功能,与监控平台联网,可实现对车辆的运行监控、孤寡老人 或孩童的防走失、宠物的找寻等。
系统功耗低、响应速度快,具有很好的实用价值。
关键词:GPSsBDSsGPRS.i 标跟踪器中图分类号:TP368.1,TN967.1 文献标识码:A 文章编号:1003-7241(2020)012-0069-04Design of Universal Target Tracker Based on GPS/BDSYANG Li 1, CHEN Liu-song 2, XIE Yong-chao 1(1. Hunan Railway Professional Technology College, ZhuZhou 412000 China;2. CRRC ZIC Research Institute of Electrical Technology and Material Engineering, Zhuzhou 412000 China )Abstract: With STM32 MCU as the control core, a universal target tracker based on GPS (Global Positioning System)/BDS (BeidouSatellite Navigation System) and GPRS technology is designed. It has real-time transmission location information, power monitoring, telephone monitoring, and alarm for help. And other functions, networked with the monitoring platform, can achieve the monitoring of the operation of the vehicle, the loss of the elderly or children, the search for pets, etc. The sys tem has low power consumption and fast response, and has good practical value.Key words: GPS; BDS; GPRS; target tracker1引言目标跟踪器是一种实时提供跟踪目标位置信息的电 子设备,通常可分为车辆跟踪器和个人跟踪器。

如何使用GPS和惯性导航系统进行导航和定位导航和定位是现代社会中非常重要的技术应用,而GPS(全球定位系统)和惯性导航系统则是实现导航和定位的关键技术。
本文将介绍如何使用GPS和惯性导航系统进行导航和定位,并阐述它们在不同领域中的广泛应用。
一、GPS的原理和应用GPS是一种基于卫星的全球定位系统,通过接收来自多颗卫星的信号,计算出接收器的准确位置。
GPS系统包括卫星、接收器和控制系统三个部分。
首先,卫星是GPS系统的核心,它们旋转在地球轨道上,并向接收器发送射频信号。
接收器接收到至少三颗卫星的信号后,可以通过计算信号传播时间和卫星位置信息,得出接收器的准确位置。
其次,接收器是GPS系统的设备,通过接收卫星的信号和测量传播时间来计算定位信息。
接收器不仅能够确定位置,还可以提供速度、时间和高度等相关数据。
GPS接收器主要应用于汽车导航、航空航天、军事和户外运动等领域。
最后,控制系统是GPS系统的管理和调控中心,保证卫星运行正常、信号准确传输。
控制系统负责监测卫星的轨道和时钟,以及向卫星发送指令调整轨道和纠正时钟误差。
GPS在各个领域都有广泛的应用。
在汽车导航领域,用户可以通过安装GPS导航仪或使用手机APP等方式,实时获取自己的位置和导航路线。
在航空领域,飞行员可以使用GPS系统确定飞机的位置、航向和飞行速度。
此外,GPS还在军事、渔业、地质勘探等领域发挥着重要作用。
二、惯性导航系统的原理和应用惯性导航系统是一种基于惯性测量单元(IMU)的定位和导航技术。
IMU由加速度计和陀螺仪组成,通过测量物体的加速度和角速度,计算出物体的运动轨迹和姿态。
加速度计用来测量物体的加速度,可以判断物体是否在加速或减速,从而得知位置的改变。
陀螺仪则用来测量物体的角速度,可以判断物体的旋转情况,从而得知方向的改变。
惯性导航系统的优势在于不依赖外部信号,无需依靠地面设施或卫星信号,适用于无人机、航天器等没有稳定通信和卫星覆盖的环境。
基于单片机的GPS定位系统设计摘要GPS是全球定位系统英文名词Global Positioning System的缩写.该系统是美国布设的第二代卫星无线电导航系统。
它能为用户提供全球性、全天候、连续、实时、高精度的三维坐标、三向速度和时间信息.其目的是在全球范围内对地面和空中目标进行准确定位和监测。
现在,GPS接收机作为一种先进的导航和定位仪器,已在军事及民用领域得到广泛的应用。
本设计是基于AT89C51单片机来实现的简易GPS定位信息显示系统。
本控制系统主要完成接受数据、时间显示、经度显示、纬度显示等常规功能.此方案基于单片机、GPS模块和12864液晶显示屏等硬件,并应用C语言实现了GPS信号的提取、显示及基本的键盘控制操作等。
经过实践测试,这种接收机可以达到基本GPS信息的接收以及显示,可以做到体积小、精度高、连续导航,并可广泛应用于个人野外旅游探险、出租汽车定位及海上作业等领域。
关键词:GPS定位系统,单片机,液晶显示屏DESIGN OF GPS RECEIVER BASED ON 51 SINGLE CHIPCOMPUTERABSTRACTGPS is the abbreviation of the English term Global Positioning System global positioning system. The system is the United States laid the second generation satellite radio navigation system. It can provide users with continuous, real—time,global, round—the—clock,high precision three dimensional coordinates, three velocity and time information. Aimed at targets on the ground and in the air around the world an accurate positioning and monitoring。
目录第一章GPS简介及基本理论 (2)1.1 GPS的概述 (2)1.2 GPS的组成 (3)1.3 GPS的发展趋势 (3)1.4 Globalsat和HOLUX的EB-3531 (4)1.5 EB-3531的特点 (5)第二章硬件电路设计 (7)2.1 电源转换电路设计 (7)2.2 GPS接收模块与单片机接口电路设计 (9)2.3 单片机控制系统的硬件电路 (9)第三章软件部分设计 (11)3.1 串口通行模块 (11)3.2主程序设计 (13)第四章调试 (15)4.1 硬件调试 (15)4.2 软件调试 (15)第五章总结 (17)致谢 (18)参考文献 (19)第一章 GPS简介及基本理论1.1 GPS的概述GPS是英文Navigation Satellitte Timing and Ranging/Global Positioning System的字头缩写词(NAVSTAR/GPS)的简称。
它的含义是,利用卫星的测时和测距进行导航,以构成全球卫星定位系统。
现在国际上已经公认:将这一全球定位系统简称:GPS。
GPS系统的前身为美军研制的一种“子午仪”导航卫星系统(Transit),1958年研制,64年正式投入使用。
该系统用5到6颗卫星组成的星网工作,每天最多绕过地球13次,并且无法给出高度信息,在定位精度方面也不尽如人意。
然而,子午仪系统使得研发部门对卫星定位取得了初步的经验,并验证了由卫星系统进行定位的可行性,为GPS系统的研制埋下了铺垫。
由于卫星定位显示出在导航方面的巨大优越性及子午仪系统存在对潜艇和舰船导航方面的巨大缺陷。
美国海陆空三军及民用部门都感到迫切需要一种新的卫星导航系统。
为此,美国海军研究实验室(NRL)提出了名为Tinmation的用12到18颗卫星组成10000km高度的全球定位网计划,并于67年、69年和74年各发射了一颗试验卫星,在这些卫星上初步试验了原子钟计时系统,这是GPS系统精确定位的基础。

高精度GPS定位系统设计与研究摘要:GPS(Global Positioning System)定位技术是一种现代化的全球卫星导航系统,它在交通、军事、地质勘探以及民用领域中有着广泛的应用。
然而,传统的GPS定位系统在精度方面存在一定的限制,因此对于高精度GPS定位系统的设计与研究具有重要意义。
本文通过分析目前广泛应用的高精度GPS定位系统技术,探讨了其原理、构架和关键技术,并对其性能进行了评估和改进。
同时,本文还对未来高精度GPS定位系统的发展趋势进行了展望。
关键词:GPS定位系统、高精度、原理、构架、关键技术、性能评估、发展趋势1. 引言GPS定位系统是一种基于卫星导航的定位技术,通过接收来自卫星的信号来计算接收器的位置。
随着现代科技的不断发展,GPS定位系统的精度也不断提高。
然而,在某些领域,如精密农业、自动驾驶、航空航天等,传统的GPS定位系统精度存在一定的不足。
因此,设计与研究高精度的GPS定位系统成为了现实需求。
2. 高精度GPS定位系统的原理高精度GPS定位系统的原理基本上与传统GPS定位系统相似,但在信号处理、数据融合和算法改进方面进行了优化。
高精度GPS定位系统通过接收来自多颗卫星的信号,并利用测量学方法来计算接收器的位置信息。
具体来说,高精度GPS定位系统通过解算卫星发射信号与接收器接收信号之间的距离差,利用多个卫星的信号进行三角定位,以提高定位的精度。
3. 高精度GPS定位系统的构架高精度GPS定位系统的构架包括接收机、卫星、用户终端和数据处理设备。
接收机负责接收卫星信号,并对信号进行处理和解算。
卫星通过发送信号来提供定位信息。
用户终端接收接收机解算得到的定位信息,并将其用于实际应用。
数据处理设备负责对接收到的卫星信号进行处理和计算,以提高GPS定位的精度。
4. 高精度GPS定位系统的关键技术4.1 多频率信号处理技术传统的GPS定位系统只使用单频GPS信号进行定位。
而高精度GPS定位系统则采用多频GPS信号,通过分析不同频率信号的差异来提高定位的精度。
基于GSM技术的GPS定位及跟踪系统作者:林真胡兰馨杨维坚来源:《电子世界》2004年第03期摘要本文阐述了利用现有的GSM网组成对移动目标跟踪的卫星定位系统的理论依据;实施的技术手段。
以及GPS移动目标跟踪系统的组成。
并且对该系统的硬件设计及软件设计进行了相应的描述。
GPS系统是利用卫星进行测时、测距的系统。
GPS的定位方式分为绝对定位和相对定位。
GPS相对定位用于大地测量。
目的是要测量被测量点相对于某一已知点的位置。
不是直接测量被测点在WGS-84地心坐标系的绝对位置。
而对于运动的目标瞬间位置和运动速度的测量是采用GPS绝对定位方式。
无论那一种方式,都是由GPS同时观测4颗以上的卫星,根据每颗卫星的位置和每颗卫星与被测点的伪距数值,建立伪距定位方程组,通过对方程组求解和进行误差校正运算,得到被测点在WGS-84地心坐标系的坐标,然后转换成‘新1954年北京坐标系’的坐标。
对于建立GPS移动目标跟踪系统的关键技术是将GPS发布的广播电文通过通信平台发送出去。
实现手段有两种:一是申请专用的频率,建立专用的通信平台;二是利用现有的共用移动通信网络建立通信平台。
对于前者,由于频率资源的限制,申请频率将很难,即使申请到了专用的频率,但建系统的费用将很大,用户的使用费用将会很高。
由此造成普遍使用的困难。
因此,相比之下,后一种手段更为可行。
随着GPS组网技术成本的下降、使用成本的下降,以及GPS本身价格的下降,GPS技术在发达国家相当普及,早已进入了民用,但是在中国却一直没有普及,原因之一就是通信平台问题。
现在全球移动通信系统(GSM)在我国东部、中部地区,尤其是在城市已经相当普及,因此利用GSM系统作为组成城市的公共汽车调度系统,出租车的调度系统,贵重物品运输车的跟踪系统,机动车防盗系统等通信平台,应该是非常容易的事情。
1.技术手段以GSM系统为通信平台传送GPS的广播电文有两个途径:一是数据通道,二是语音通道。
基于ARM处理器的GPS导航系统设计报告姓名:班级:学号:基于ARM处理器的GPS导航系统设计报告一、需求分析1、问题的提出随着我国经济水平和时代的快速发展,汽车行业也蓬勃发展起来。
汽车的增长速度远远超过公路的增长速度,汽车拥有量的急剧增加和城市现代化交通建设的相对滞后导致城市交通情况不断恶化。
同时,现代物流对运输车辆和货物安全与准时调运的要求、公交与出租车的运营管理、大型的企事业单位日常车辆管理也都对车辆的监控与导航有迫切的需求。
面且随着旅游行业的发展,人们急需要一种可以随时随地知道自己方位和目的地的方便设备。
2.、可行性的分析GPS(全球定位系统)具有全球、全天候工作,定位精度高,功能多,应用广的特点,通过GPS接收机可以实现精确的自主定位,这为实现车辆的定位和导航奠定了基础。
伴随ARM处理器、嵌入式操作系统、路径优化控制算法和GPS 网络的成熟,车辆定位导航系统有了新的发展,可以在短时间内实现定位和最优路径导航。
本项目在信息系统终端的设计中采用了ARM处理器和嵌入式操作系统uC/OS-II(专门为计算机的嵌入式应用设计的,绝大部分代码是用C语言编写的。
)作为开发平台,通过采用ARM处理器可达到最大为60MHz的CPU操作频率,使得数据处理能力大大加强,同时,基于嵌入式操作系统uC/OS-II开发设计的软件具备了很强的扩展性和稳定性。
二.规格说明二、规格说明该嵌入式GPS导航系统由GPS系统获得当时所在的位置的经纬度,通过换算和地图匹配在地图上得到当时的实际位置,然后由用户输入目的地,通过最短路径算法计算最短路径并在矢量地图上显示,同时提取GPS提供的速度,时间等信息显示在屏幕上。
1.需要采用的设备本嵌入式GPS导航系统的硬件核心是意法半导体ARM7系列中的16/32位RISC处理器STR710FZ2T6芯片,该芯片强大的实时处理能力和丰富的外围接口非常适合嵌入式系统的开发,本系统正是基于该芯片的这些特点面设计的。
关于信息技术在现代汽车及交通领域中的应用【摘要】信息技术是时代发展的巨大动力,将信息技术融合在汽车上,实现智能化和网络化,是现代汽车的发展趋势,让汽车的功能越来越多样、丰富,让行驶更加安全。
本文系统分析了车辆安全系统,网络、通讯及导航系统,智能交通系统和移动多媒体系统五个方面,介绍了信息技术时代汽车发展的特点。
【关键词】信息技术;系统;智能化;网络化1、信息技术与构成信息技术应用于汽车及交通领域表现为:基于全球定位系统(GPS)、地理信息系统(GIS)、移动通讯网络以及国际网络运输控制协议(TCP/IP)等,实现数据传递、话音通讯、目标跟踪、自动报警以及驾乘者获取各种公众信息、实用信息服务等功能。
信息时代促进汽车技术的迅猛发展,表现在车辆系统上有如下几个方面:2、车辆安全系统2.1自适应巡航控制系统自适应巡航控制系统的动能是:车主自定义车速后,系统用激光波束等方式扫描汽车周围环境,探测前方路径情况,并自动调节档位和气门开度,保持安全行车距离。
这项系统进一步发展的方向是实现公路和汽车的同步自适应,车辆和公路能够通过传感和通讯实现信息互动,使得驾驶人员实时掌握路面的情况,及时改变行车速和路线。
2.2防撞警告系统和撞车通告系统系统通过雷达等手段扫描行车路面情况,及时发出预示险情,通过司机手动或系统自动进行制动,防止车辆受到撞击。
同时,可以将系统与GPS共同运作,当车辆受到撞击,撞车报告系统将生成撞击报告和位置定位,通过GPS发送到急救中心,提高救援的效率。
2.3集成安全系统集成安全系统是多项技术的综合运用,对驾驶过程中涉及的各个方面,如帘式头部气囊、安全带预张紧和过张紧装置、自适应能量吸收转向柱、主动膝部护膝等,进行综合性的感应和保护。
2.4被盗车辆寻回系统车主通过网络设定汽车安全区域,开启系统发射机,对车辆的位置进行监控,如果发生盗窃情况,发射机能够将车辆的位置信息和行驶方向进行报告,对警方进行案件处理提供了最有效的线索。
基于Android的移动终端GPS测量系统的设计与开发秦超,姜良君,蔡永香(长江大学地球科学学院,湖北荆州,434023)摘要:本文针对手机GPS功能进行移动应用开发,设计并实现了基于Android平台的移动终端GPS测量系统。
在分析学生野外测量实习需求的基础上,对系统进行了功能模块划分;在系统的程序模块详细设计中,着重探讨了数据库的设计与地块长度/面积计算方法。
测试结果表明,该系统已能替代GPS手持终端,满足野外测量实习的需要。
关键词:Android;移动终端;GPS测量1 引言第三代移动通讯(3G)技术为移动终端用户带来了更快的数据传输率,也为电信网络与计算机网络的融合提供了支持。
随着3G网络的使用,移动终端不仅是通讯网络的终端,也将成为互联网的终端[1]。
因此,移动终端的应用和需要的服务将会有很大的发展空间。
Google于2007年11月5日推出了基于Linux平台的移动终端系统软件平台——Android,该平台由操作系统、中间件、用户界面和应用软件组成,是首个为移动终端打造的真正开放和完整的移动软件[2],并融合了GPS技术,支持GPS的应用开发。
GPS的出现为测量技术带来了一场深刻的技术革命。
利用GPS的定位功能,对于任何点状、线状、面状地物,都可以通过GPS的定位功能获取其地理坐标数据,通过地图投影方法,可计算出线状地物的长度,面状地物的面积等。
以前学生野外测量实习时,常用的是手持GPS,这是一种专用的测量设备,需要专门购置和携带。
而随着智能手机的发展和普及,学生基本上是人手一部,因此在基于Android平台的移动终端上开发GPS测量系统,可使得手机用户随时利用手机进行测量定位,操作方便、便于携带,具有很强的实用性。
因此,本文利用智能手机自带的GPS定位功能,通过获取测量点的地理坐标数据,进行点、线、面地物的空间位置测量,通过地图投影方法,计算出线状地物的长度或面状地物的面积及周长,并能够将结果可视化的显示在屏幕上。
基于嵌入式ARM-Linux的GPS智能终端设计作者:苏丽华,赵可萍,崔玥来源:《现代电子技术》2009年第12期摘要:基于ARM处理器和嵌入式Linux 操作系统的特点,利用CDMA网络在数据传输中的优点和GPS智能监控系统结构,实现在32位RISC处理器AT91RM9200和嵌入式Linux操作系统平台下将GPS技术与CDMA网络相结合的嵌入式智能终端设计。
系统功能简化了多任务程序设计,降低了开发难度。
数据传输有着永远在线、费用低廉的优点,同时确保数据传输万无一失。
随着移动通信网络的发展, GPS智能终端在3G移动通信系统中有着广阔的应用前景。
关键词:嵌入式Linux;AT91RM9200;CDMA;智能终端中图分类号:TP273;TP316.8 文献标识码:B 文章编号:1004-373X(2009)12-025-03Design of GPS Intelligent Terminal Based on Embedded ARM-LinuxSU Lihua,ZHAO Keping,CUI Yue(School of Information and Communication Engineering,Tianjin PolytechnicUniversity,Tianjin,300160,China)Abstract: Based on the features of ARM processor and embedded Linux operatingsystem,implementing the design of GPS intelligent terminal based on CDMA under 32bit RISC processor AT91RM9200 and embedded Linux operating system with the advantages of CDMA communication technology in data transmission and the components of GPS intelligent monitoring system to predigest the program of multitask and reduce the exploitation difficulty.Data transmission has the merits of online,low cost and safe.GPS intelligent terminal has wide application along with the development of mobile communication network.Keywords:embedded Linux;AT91RM9200;CDMA;intelligent terminalGPS智能终端是智能交通系统(ITS系统)的重要组成部分,它将卫星定位技术(GPS)、地理信息系统(GIS)以及无线通信技术融于一身。

一.选题的目的及研究意义设计的内容是基于AT89C51单片机倒车防撞系统的设计,主要是利用超声波的特点和优势,将超声波测距系统和AT89C51单片机结合于一体,设计出一种基于AT89C51单片机的倒车防撞报警系统。
该系统采用软、硬件结合的方法,具有模块化和多用化的特点。
此设计采用超声波测距原理,当汽车与障碍物的距离小于所设定的安全距离时,系统能发出声光报警,并随着距离的不断缩近,报警频率不断提高。
超声波测距仪器一般由发射器、接收器和信号处理器三部分组成。
工作时,超声波发射器发出超声波脉冲,超声波接收器接收遇到障碍物反射回来的反射波,准确测量超声波从发射到遇到障碍物反射返回的时间,根据超声波的传播速度,可以计算出障碍物距离。
随着我国经济的飞速发展,交通运输车辆的不断增多,由此产生的交通问题越来越成为人们关注的问题。
其中倒车事故由于发生的频率极高,已引起了社会和交通部门的高度重视。
倒车事故发生的原因是多方面的,倒车镜有死角,驾车者目测距离有误差,视线模糊等原因造成倒车时的事故率远大于汽车前进时的事故率,尤其是非职业驾驶员以及女性更为突出。
而倒车事故给车主带来许多麻烦,例如撞上别人的车、消防水笼头,如果伤及儿童更是不堪设想,有鉴于此,汽车高科技产品家族中,专为汽车倒车泊位设置的“倒车雷达”应运而生,倒车雷达的加装可以解决驾驶人员的后顾之忧,大大降低倒车事故的发生。
汽车倒车雷达全称为“倒车防撞雷达”,也叫“泊车辅助装置”,是汽车泊车安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除驾驶员泊车和起动车辆时因前后左右探视所引起的困扰,并帮助驾驶员克服视野死角和视线模糊的缺陷,提高驾驶的安全性。
倒车雷达的原理与普通雷达一样,是根据蝙蝠在黑夜里高速飞行而不会与任何障碍物相撞的原理设计开发的。
通过感应装置发出超声波,然后通过反射回来的超声波来判断前方是否有障碍物,以及障碍物的距离、大小、方向、形状等。
物联网中的移动目标定位与跟踪技术随着物联网技术的快速发展和广泛应用,移动目标定位与跟踪技术在物联网系统中的重要性日益凸显。
无论是智能家居、智慧城市、智能交通还是工业自动化等领域,都需要准确地获取移动目标的位置信息并实时进行跟踪。
本文将基于物联网中的移动目标定位与跟踪技术进行探讨与分析。
移动目标定位是指通过无线通信和传感器技术来确定移动目标的位置,并将其准确地在空间中定位。
在物联网系统中,常用的定位技术包括全球定位系统(GPS)、蜂窝移动通信网络、无线传感器网络和射频识别等。
其中,GPS是目前最常用的定位技术,通过卫星信号和地面基站的信号来实现对移动目标位置的定位。
蜂窝移动通信网络是一种利用基站和移动设备间的信号交互来实现定位的技术,具有较高的精度和广泛的覆盖范围。
无线传感器网络是一种通过部署在移动目标周围的传感器节点来实现定位的技术,适用于小范围内的定位需求。
射频识别技术适用于近距离的目标定位,能够通过无线识别标签来追踪目标位置。
与移动目标定位相比,移动目标跟踪需要实时追踪目标的位置,并在目标发生变化时进行快速更新。
在物联网系统中,移动目标跟踪技术有三种主要方式:基于传感器的跟踪、基于图像处理的跟踪和基于数据融合的跟踪。
基于传感器的跟踪技术利用部署在目标周围的传感器节点通过检测目标的位置、速度和加速度等信息来实现目标的跟踪。
这种技术适用于小范围内的目标跟踪需求。
基于图像处理的跟踪技术通过识别目标的图像特征来实现目标的跟踪,可以应用于广泛的场景,如安防监控、智能驾驶等。
基于数据融合的跟踪技术将多个传感器获取的数据进行融合处理,提高了跟踪的精度和稳定性,适用于复杂环境下的目标跟踪。
在物联网中的移动目标定位与跟踪技术中,存在着一些挑战与问题需要解决。
首先是精度和可靠性问题。
目标在移动过程中可能会受到信号干扰、多径效应等因素的影响,导致定位和跟踪的精度下降。
其次是成本和能耗问题。
传统的无线通信和传感器技术在成本和能耗方面存在一定的限制,对于大规模部署的物联网系统来说,需要考虑如何降低成本和能耗。
基于ARM的GPS地面目标跟踪及报警系统的设计,GPS,定位,GSM,ARM,电
子地图
1引言随着现代化科技的发展,人们对移动目标监控的要求越来越高。
例如,地面目标跟踪及报警系统可协助家长实现对孩子的监控,孩子若遭遇走失或劫持事件,监控中心通过分析手持终端发送的GPS数据确定孩子所在位置,以采取相关安全措施。
此外,地面目标跟踪及报警系统在城市出租车调度、物流运输监控等领域都有着广泛的应用前景。
地面目标跟踪及报警系统是伴随着GPS 技术和GSM网络的成熟而发展起来的。
20世纪90年代初,GPS技术逐渐兴
1 引言
随着现代化科技的发展,人们对移动目标监控的要求越来越高。
例如,地面目标跟踪及报警系统可协助家长实现对孩子的监控,孩子若遭遇走失或劫持事件,监控中心通过分析手持终端发送的GPS数据确定孩子所在位置,以采取相关安全措施。
此外,地面目标跟踪及报警系统在城市出租车调度、物流运输监控等领域都有着广泛的应用前景。
地面目标跟踪及报警系统是伴随着GPS技术和GSM网络的成熟而发展起来的。
20世纪90年代初,GPS技术逐渐兴起,基于GPS的移动跟踪、监控系统开始走向市场。
近年来,GSM网络发展迅速,其数据传输能力明显加强,并且,GPS技术更加成熟。
2000年5月1日,美国政府宣布取消GPS普通定位的选择干扰(SA)政策,这样,一般GPS接收机定位精度可以达到25
m。
综合上述,采用GPS和GSM网络,以低功耗ARM微控制器展开设计的地面目标跟踪及报警系统势必得到迅猛发展,市场潜力巨大。
2 GPS和GSM简介
全球定位系统(Global Positioning System,GPS)是美国从20世纪70年代开始研制,历时20年,耗资200亿美元,于1994年全面建成,具有在海、陆、空进行全方位实时三维导航与定位能力的新一代卫星导航与定位系统。
其基本原理是把高速运动的卫星瞬间位置作为已知的起算数据,采用空间距离后方的方法,确定待测点的位置。
GSM系统是目前基于时分多址技术的移动通讯体制中比较成熟、应用最广泛的一种系统,主要提供话音、短消息、数据等多种业务,本系统就是利用其短消息服务传输数据。
GPS以全天候、高精度、自动化、高效益等显著特点,广泛地应用于大地测量、地质勘探和车辆导航等方面,近年来随着GPS模块成本的不断下降和地面通信系统的不断发展,GSM和GPS技术相结合的系统正如火如荼地向前发展。
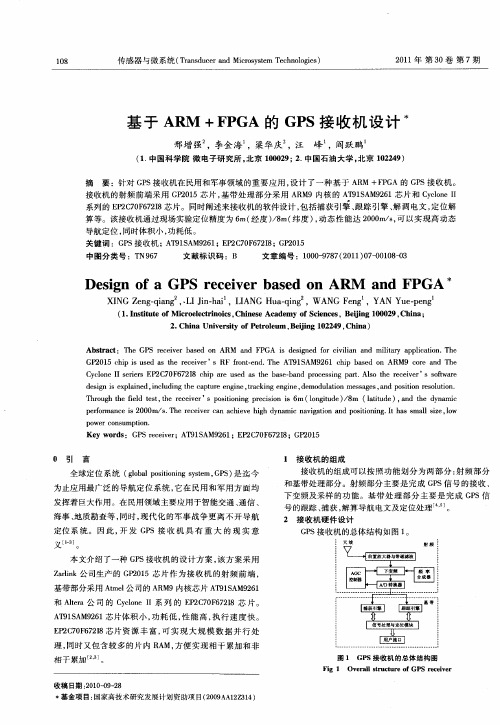
3 系统的组成结构
地面目标跟踪及报警系统由手持终端和监控中心两大部分组成,如图1所示。
其中手持终端以ARM微控制器为核心,通过UART0和UART1分别连接GPS模块和GSM模块(发送);监控中心由PC机和GSM模块(接收)构成,PC机中安装的电子地图软件用于解析GSM模块传来的定位信息,并精确显示出被跟踪目标的具体地理位置。
4 系统的硬件设计
4.1 手持终端部分
手持终端由ARM微控制器、GPS模块、GSM模块、按键、LCD构成。
其结构如图2所示。
手持终端以LPC2210为主控制器,LPC2210是基于实时仿真和跟踪的16/32位ARM7TDMI-SCPU的微控制器,并带有256
KB的嵌入高速Flash存储器;128位宽度的存储器接口和独特的加速结构,使32位代码能够在最大时钟速率下运行。
由于内置了宽范围的串行通信接口,从而给硬件设计和软件移植都带来了很大的便利。
GPS模块采用日本光电公司的GSU-36,体积小,功耗低,抗电磁干扰,可以同时跟踪12颗卫星。
GSM模块采用BENQ公司的M22。
LPC2210通过串行口UART0发送GPS采样周期的设置、GPS数据类型选择和通信波特率等控制命令和接收GPS定位信息。
通过串行口UART1发送AT指令实现控制GSM的工作和传送SMS。
LCD显示当前的经纬度和时间等信息,按键用来控制是否发送信号。
4.2 监控中心部分
监控中心由GSM模块与PC机组成。
采用OziExplorer作为监控中心的电子地图软件,在PC机上安装完OZI,设置好相关的端口参数,即可实现将GSM模块传送来的定位信息实时显示在电子地图上。
5 系统的软件设计
手持终端的相关程序用C语言编写,程序流程如图3所示。
软件设计主要包括系统初始化、GPS数据处理、GSM数据处理3大部分。
5.1 系统初始化
系统初始化主要是对串行口的初始化,包括传输帧格式、波特率的设置。
根据GPS模块、GSM模块的硬件特性,设置UART0波特率为4
800 b/s、UART1波特率为9 600 b/s,均无奇偶校验位,1位5.2 GPS数据处理 GPS模块接收GPS卫星定位信号,判断其为GPRMC格式,经解析留下经纬度、UTC时间等主要信息以待下一步处理,否则继续接收GPS卫星定位信号。
GPS模块输出的GPS定位信息服从NAME-0183通信标准。
NAME-0183通信标准的输出数据采用的是ASCII码,其内容包含了纬度、经度、高度、速度、日期、时间、航向以及卫星状况等信息。
语句有6种,包括GGA、GLL、GSA、GSV、RMC和VGT。
本系统用到的是RMC纪录语句,它包含了定位系统需要的所有信息。
格式举例:
5.3 GSM数据处理
确认有按键按下时(启动键盘防抖动程序),提取存储的数据,转换成相应的Unicode码,即符合PDU格式。
然后将最终有效的定位信息发送至监控中心。
GSM的短信业务SMS利用信令信道传输,它不用拨号建立连接,把要发送的信息加上目的地址和其他控制信息发到短信服务中心,经短信服务中心完成存储再转发送给目标机,这种特性适合数据远程传送。
每条短信息容量为140字符。
GSM终端通过串行口控制SMS有三种接入协议,分别是BlockMode、基于AT命令的Text
Mode和基于AT命令的PDU Mode。
其中PDU Mode应用最为广泛。
本系统采用的是PDU Mode,采用AT命令完成短信息的读取和发送。
不同厂家生产的GSM模块AT命令集会稍有不同,本系统采用的是BENQ公司的M22模块,具体可以参考BENQ公司提供的数据手册和《AT命令用户手册》等资料。
比如发送一条消息可以采用AT+CMGS命令,格式如下:
AT+CMGS=<短信长度>+<回车>+<目的手机号码>+<回车>+<短信内容>+<Ctrl+Z>
系统上电后,ARM微控制器开始执行主程序。
在主程序中,首先进行系统初始化,初始化的内容包括GPS模块和GSM模块的基本参数设置,然后进入主程序的数据处理部分。
6 系统的实现
6.1 实现步骤与结果
启动调试软件ADS,通过实验板上的JATG接口将编好的源代码编译、烧写进ARM微控制器。
将监控中心GSM模块上的SIM卡插放到手机中,让手机充当"临时监控中心"。
将手持终端脱机上电运行,4、5秒后按下实验板上的中断触发
按钮,略等片刻,手机便收到一条来自手持终端的信息,经纬度为
3907.9579N,11713.8762E,而实际精确经纬度为3907.8933N,11713.8668E,略存在误差。
取下手机的SIM卡,放至监控中心的GSM模块上。
开启PC机上的电子地图软件OZI,设置COM1口的各参数:波特率4 800 b/s、停止位1、无奇偶校验,以使其与GSM模块匹配。
再一次上电运行,点击OZI上的"导航"按钮。
定位点正好停留在了天津市河东区天津工业大学上,放大地图,定位点落在了实验楼所在位置,地图窗口下方也实时显示出了定位点的经纬度数值和当前时间(如图4所示)。
6.2 误差分析
系统调试初步通过,还得测试其稳定性、分析误差所在。
从实验结果得出,定位精度的误差基本上控制在25 m以内,误差原因主要来自两方面:首先是GPS 模块硬件本身的性能误差。
GSU-36要求工作电压为直流3.1
V~3.6 V(纹波≤50 mV)。
且模块使用有源天线,若天线受附近电磁场干扰或GPS卫星所处位置不很理想时,定位精度会有不同程度的降低。
另一方面,电子地图的分辨率也大大决定了定位点的精确性。
OZI是一个支持自主测绘、编辑电子地图的软件。
为达到理想的定位精度,可自行测绘一份更精细的电子地图。
7 结束语
基于ARM微控制器的嵌入式系统能够完成所需的各种协议,能够满足系统的软硬件需求。
地面目标跟踪及报警系统整合了GPS、GSM技术,利用GSM的SMS功能实现手持终端和监控中心之间的数据传送,以实施对目标的实时定位跟踪。
在开发测试中,可明显感觉到与自建无线数据网相比,其可操作性及实时性有显著提高,而且成本较低,结构简单,可靠性较高。