kuka机器人工具标定方法
- 格式:ppt
- 大小:1.21 MB
- 文档页数:13
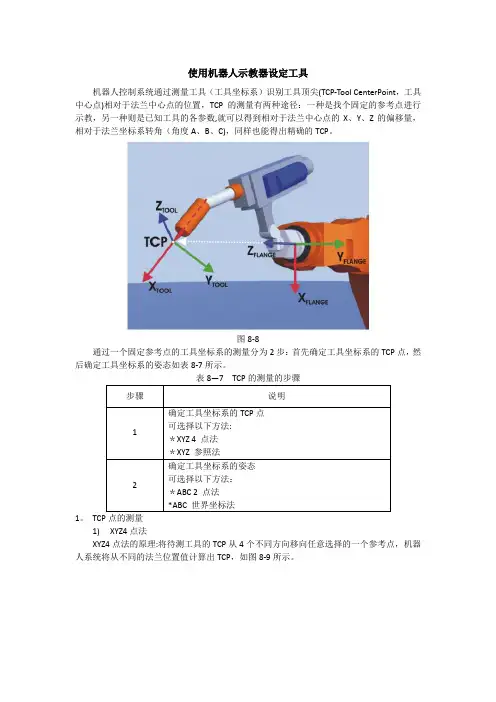
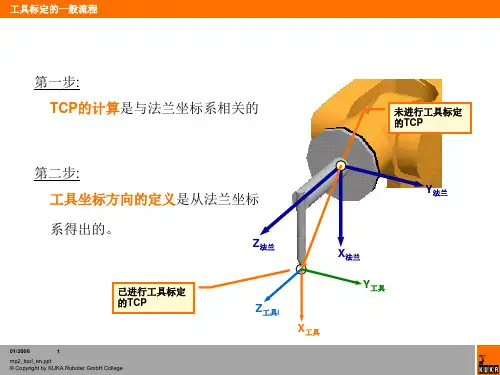
使用机器人示教器设定工具机器人控制系统通过测量工具(工具坐标系)识别工具顶尖(TCP-Tool CenterPoint,工具中心点)相对于法兰中心点的位置,TCP的测量有两种途径:一种是找个固定的参考点进行示教,另一种则是已知工具的各参数,就可以得到相对于法兰中心点的X、Y、Z的偏移量,相对于法兰坐标系转角(角度A、B、C),同样也能得出精确的TCP。
图8-8通过一个固定参考点的工具坐标系的测量分为2步:首先确定工具坐标系的TCP点,然后确定工具坐标系的姿态如表8-7所示。
步骤说明1 确定工具坐标系的TCP点可选择以下方法:*XYZ 4 点法*XYZ 参照法2 确定工具坐标系的姿态可选择以下方法:*ABC 2 点法*ABC 世界坐标法1。
TCP点的测量1)XYZ4点法XYZ4点法的原理:将待测工具的TCP从4个不同方向移向任意选择的一个参考点,机器人系统将从不同的法兰位置值计算出TCP,如图8-9所示。
图8—9 XYZ4点法其具体操作步骤如下:1. 选择菜单序列投入运行> 测量> 工具〉XYZ 4 点。
2. 为待测量的工具给定一个号码和一个名称。
用继续键确认。
3。
用TCP移至任意一个参照点.按下“测量”,对话框“ 是否应用当前位置?继续测量" 用“是”加以确认4。
用TCP从其他方向朝参照点。
重复步骤3次。
5。
负载数据输入窗口自动打开,正确输入负载数据,然后按下“继续"按钮。
6。
包含测得的TCP X、Y、Z 值的窗口自动打开,测量精度可在误差项中读取。
数据可通过保存直接保存.2)XYZ参照法采用XYZ 参照法时,将对一件新工具与一件已测量过的工具进行比较测量.机器人控制系统比较法兰位置,并对新工具的TCP进行计算。
如图7-10所示.图8-10其具体操作步骤如下:1。
前提条件是,在连接法兰上装有一个已测量过的工具,并且TCP的数据已知.2. 在主菜单中选择投入运行> 测量〉工具〉XYZ 参照.3. 为新工具指定一个编号和一个名称。
机器人工具坐标系与工件坐标系标定一.工具坐标系1.工具坐标系的创建新建工具名称界面工具初始值参数设置界面工具的重量“mass”值的设定工具的重心偏移“cog”值的设定进入工具定义界面工具设定界面一.工具坐标系 2.工具坐标系的标定机器人工具坐标系的标定是指将工具中心点(TCP)的位置告诉机器人,指出它与末端关节坐标系的关系。
(1)外部基准标定法只需要使工具对准某一测定好的外部基准点,便可完成标定,标定过程快捷简便。
(2)多点标定法这类标定包含工具中心点(TCP)位置多点标定和工具坐标系(TCF)姿态多点标定。
TCP位置标定是使几个标定点TCF位置重合,从而计算出TCP,即工具坐标系原点相对于末端关节坐标系的位置。
四点法:TCP姿态标定是使几个标定点之间具有特殊的方位关系,从而计算出工具坐标系相对于末端关节坐标系的姿态;五点法:在四点法的基础上,除能确定工具坐标系的位置外还能确定工具坐标系的X轴方向;?六点法:在五点法的基础上,还能确定工具坐标系的Z轴方向;“点3”修改位置界面机器人姿态3画面“点1”修改位置界面机器人姿态1画面“点2”修改位置界面机器人姿态2画面“点4”修改位置界面机器人姿态4画面六点法标定————设定TCP视频演示进入单轴运动模式界面进入主程序编辑界面选定的例行程序界面例行程序打开后界面载荷确认界面选定的例行程序界面?自动计算工具重量及重心位置一.工件(用户)坐标系的标定工件坐标是用来描述工件位置的坐标系。
工件坐标由两个框架构成:用户框架和对象框架。
所有的编程位置将与对象框架关联,对象框架与用户框架关联,而用户框架与大地坐标系关联。
建立工件坐标系的方法如下:主菜单→程序数据→工件坐标系→新建→名称→定义工件坐标系。
定义工件坐标系有如下两种方法:1.直接输入坐标值,即x、y、z的值。
2.示教法:编辑→定义→第一点→第二、三点(三点不在同一条直线上即可)。
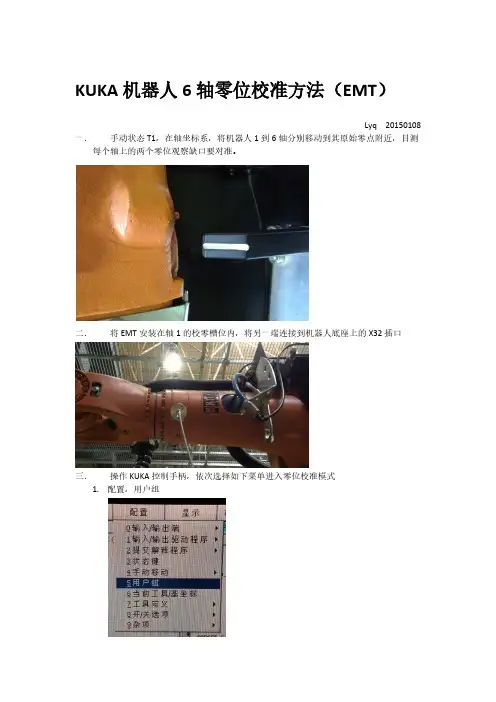
KUKA机器人6轴零位校准方法(EMT)Lyq 20150108 一.手动状态T1,在轴坐标系,将机器人1到6轴分别移动到其原始零点附近,目测每个轴上的两个零位观察缺口要对准。
二.将EMT安装在轴1的校零槽位内,将另一端连接到机器人底座上的X32插口三.操作KUKA控制手柄,依次选择如下菜单进入零位校准模式1. 配置,用户组2. 选专家,密码kuka3. 选择准备运行,零点校正,电子测量器4. 标准,检查零点校正5. 选择机器人轴1,将下方报警栏信息清空,左手按住手柄背面的驱动按键,等驱动图标“I”变成绿色,按”检查“按钮对应的软键,报警栏会出现准备就绪字样。
此时轴1已经开始微动,可以观察到EMT上的两个绿色指示灯会由两个全亮变为只有1个亮,伴随着咔嗒一声,校准结束。
这时如果校准后零位与现零位偏差很小,报警栏直接会显示”轴1零位校准结束“,如果校准后零位与现零位偏差超限,则会在右侧信息栏显示校准前后的数据差别,包括编码器码值差和角度差,需要选择”存储”后才能完成零位校准。
6. 将EMT移动到轴2的校零槽位内,另一端依然连接到机器人底座上的X32插口;在右侧信息栏选择机器人轴2,按照上述步骤对轴2进行零位校准7. 依次对余下的4个轴进行零位校准四.都较准完毕后,手动模式慢速运行“维修”程序,将机器人打到维修位,观察行程和位置是否正常,若正常,之后再运行主程序,手动慢速回HOME点,观察行程和位置是否正常,若正常,则进行过料测试。
五.因本次进行零位校准的是KR150割带机器人,那么在解包系统电控柜操作屏上选择“启用KR150机器人”,在机器人KCP上选择main程序,自动,启动,等待自动对烟包割带,看是否正常。
若一切正常,则本次零位校准结束。
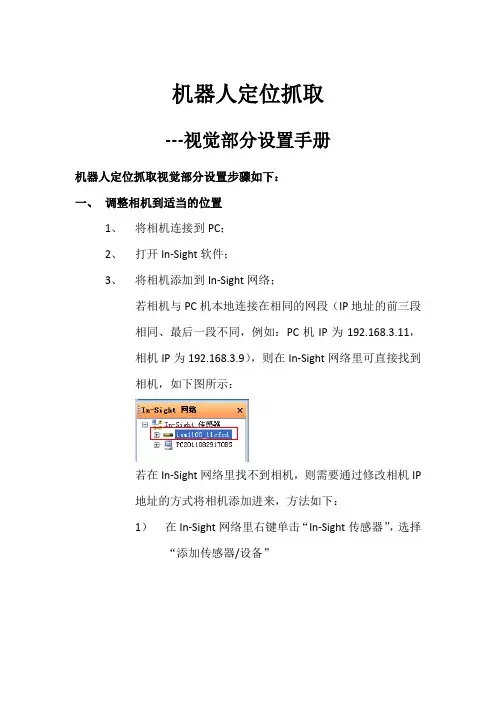
机器人定位抓取---视觉部分设置手册机器人定位抓取视觉部分设置步骤如下:一、调整相机到适当的位置1、将相机连接到PC;2、打开In-Sight软件;3、将相机添加到In-Sight网络;若相机与PC机本地连接在相同的网段(IP地址的前三段相同、最后一段不同,例如:PC机IP为192.168.3.11,相机IP为192.168.3.9),则在In-Sight网络里可直接找到相机,如下图所示:若在In-Sight网络里找不到相机,则需要通过修改相机IP地址的方式将相机添加进来,方法如下:1)在In-Sight网络里右键单击“In-Sight传感器”,选择“添加传感器/设备”2)在出现的界面中左键单击左侧区域出现的相机,在右侧区域选择“使用下列网络设置”,将相机IP地址前三段及子网掩码修改为与PC机一致(当IP地址前三段或子网掩码与PC机不一致时,右侧会出现红色叹号),3)相机IP地址及子网掩码修改好之后,点击“应用”,会出现如下对话框点击“确定”,出现同时,In-Sight网络里会出现相机。
点击“确定”,然后关闭设置页面。
4、连接相机双击In-Sight网络里出现的相机。
5、查看右下角相机状态若右下角显示,则单击上面工具栏中的“联机/脱机”图标,使相机处于脱机状态6、点击工具栏中的“实时”图标,使相机处于实时状态7、调整相机高度,使相机的视野范围(图像可见范围)满足检测需求(下图中的视野范围为18.5*13.875)8、固定相机高度二、调整图像1、将检测物放置在相机视野范围内;2、调节镜头上的“光圈”,使图像亮度适中(此操作说明中没有使用光源,所以只需要调节光圈;若使用光源,应先将光源打开,然后同时调整光源亮度及镜头光圈,使图像亮度适中);3、调节镜头上的“焦距调节”,使需要检测的平面图像最清晰,如下图4、锁紧镜头上的螺丝,使“光圈”及“焦距调节”都不可变。
三、标定/校准由于相机检测的结果均为像素值,而机器人需要的是实际数据(mm值),所以需要进行数据转换。
机器人工件坐标系标定方法目录一、准备测量设备及相关计算软件二、现场测量及标定方法三、数据保存说明:本文档定义内容需要专业测量人员与机器人工程师共同完成,目的是在现场机器人中建立与车身坐标系重合的用户坐标系以便于实施离线程序的导入使用。
版本2018.6.20第一版一.准备测量设备及相关计算软件1. 三坐标测量关节臂一台,专业操作人员及软件。
2.专用计算软件,本文档以PSA提供的标准软件为例,此软件需要在32位英文系统下才能正常运行。
——打开软件首页,点击Configuration配置,开始配置机器人——Vehicule:项目编号Ligne:线体编号Robot:机器人编号Qutil:工具填写以上四项时,每填完一项点击Ajouter添加,再点击Suivant下一项,填完之后点击Quitter完成。
二.现场测量及标定方法1.现场操作——现场架好测量臂并根据测量孔或测量球建立好车身坐标系,对于单台夹具或工装每个车型的车身坐标系是唯一的。
——在现场机器人中创建标定轨迹命名为T_PALP_OPxx(注:OPxx为工位号),用户坐标系选择Obj_Service(注坐标系值为(0,0,0,0,0,0)),测量点的注释为PALPx。
工具坐标系优先选择TOOL0减少误差(坐标系值为(0,0,0,0,0,0),如果测量臂测量不到机器人6轴法兰圆心则需要考虑将工具坐标系平移到可以测到的面)。
——示教机器人到达三个不共线的点并记录坐标值;使用测量设备测量这三个点的TCP在测量设备已建立的车身坐标系下的坐标值。
注意三个点按顺序分别进行测量和记录避免混淆。
机器人中采用笛卡尔坐标方式读数:测量软件中记录测量结果:2.用计算软件计算结果——点击下图中Calage出现右图画面——该页面右边红框中每一项选择与配置中填入的一致(即选择对应的机器人);该页面左边第一个红框中Val 3D项的X、Y、Z的值是测量设备中测得的坐标系值,Val Rob项是机器人以笛卡尔坐标记录的读数,三组值对应的是机器人到达的三个不同的空间点。
1.机器人如何在一个平面内运动解决办法:设置工具坐标、基座标,然后在调用PTP、LIN、CIRC指令时设置所用坐标为基座标即可2.如何让机器人走相对位置解决方式:通过查资料及试验发现,展开所用命令LIN P1,所走的P1点的坐标存在XP1中,XP1是E6POS类型,可直接对XP1.X,XP1.Y,XP1.Z,XP1.A,XP1.B,XP1.C这六个坐标参数赋值,赋完值后,再执行LIN XP1,机器人就会走到赋值的坐标点,如此便可进行相对赋值,如P2点需要在P1点X轴方向再前进200mm,则可设为XP2.X=XP1.X+200;将当前机器人坐标值赋给指定的P3点方法为XP3=$POS_ACT3.如何与机器人建立通讯解决方法:当机器人为客户端时,写一个外部电脑的服务器程序,设置外部电脑IP,开启服务器监听程序,机器人端按照所给示例设置对应的XML配置文件,写相应的运行代码,解析通讯数据并做相应的回应,然后运行,通讯时外部电脑关掉防火墙,否则通讯不上。
机器人做服务器也是同理,区别只在于:机器人方面,XML配置文件中要改一下设置,外部电脑要改成客户端程序。
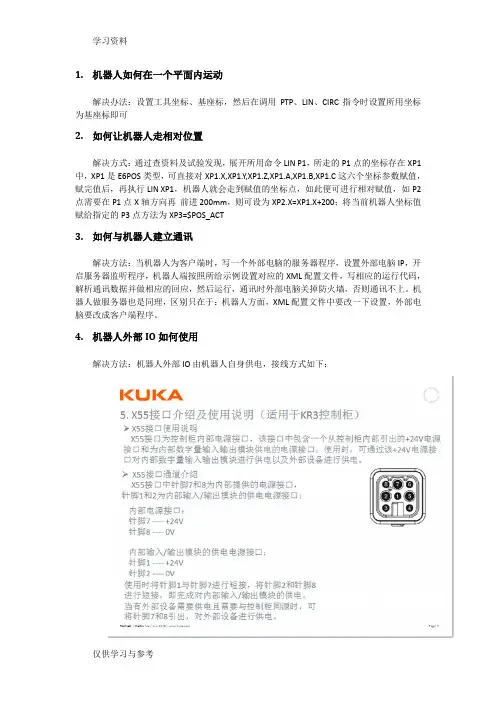
4.机器人外部IO如何使用解决方法:机器人外部IO由机器人自身供电,接线方式如下:判断机器人的指定输入端1是否有信号指令为WAIT FOR $IN[01],当端口1有信号,程序将会往下进行,否则一直等待。
设置输出端6的指令为$OUT[06]=TRUE,有几个输出信号为固定的安全类信号,不能设置,如OUT[01]默认为控制器就绪,OUT[02]默认为紧急关断闭合,OUT[08]默认为内部紧急关断等。
输入输出信号可在示教器的显示→输入/输出端→数字输入/输出端界面实时查看;5.如何通过外部传坐标点运行机器人解决方法:在机器人程序的XML通讯配置文档中的接收项里增加FRAME参数和S、T 两个参数(FRAME参数是保存机器人XYZABC坐标值,两个int型参数保存S、T的值,FRAME 参数决定机器人的目标点位,S、T决定机器人的路径),然后在机器人程序中写读取指令,当机器人与外部电脑通讯时,收到这几个参数,再将参数值赋值给目标点位即可。
库卡机器人的零点标定方法及步骤【知识专栏】库卡机器人的零点标定方法及步骤在工业自动化领域中,库卡机器人被广泛应用于各种生产线上,其高效、精准和灵活的特性受到了众多企业的青睐。
而在库卡机器人的使用过程中,零点标定是一个非常重要的环节,它直接影响着机器人的定位精度和工作效率。
本文将针对库卡机器人的零点标定方法及步骤进行深入探讨,并提供相应的个人观点和理解。
一、库卡机器人的零点标定概述零点标定是指确定机器人工作空间坐标系原点的过程,通过对机器人各关节进行坐标轴的校准,使得机器人能够准确地定位和执行任务。
对于库卡机器人来说,零点标定是其正常运行的基础,其准确性和可靠性对机器人的工作效率和精度至关重要。
二、库卡机器人的零点标定方法1. 机械标定:通过对机器人的机械结构进行校准,确定各关节的零点位置。
2. 软件标定:利用库卡机器人的控制软件进行坐标系的校准和调整。
3. 视觉标定:通过视觉系统对机器人进行实时监测和校准,实现精准的零点标定。
三、库卡机器人的零点标定步骤1. 准备工作:确认机器人处于停止状态,确保工作环境安全、整洁。
2. 机械标定:通过操纵机器人手动调整各关节,使其处于预设的零点位置,完成机械标定。
3. 软件标定:在控制软件中进入零点标定界面,按照提示进行坐标系校准和调整。
4. 视觉标定:如需使用视觉系统进行标定,则在此步骤进行相应操作,确保视觉系统的准确性和稳定性。
5. 检测验证:完成标定后,进行相关的检测验证工作,确保零点标定的准确性和可靠性。
四、个人观点和理解库卡机器人的零点标定是其正常运行的基础环节,对于保障机器人的定位精度和工作效率具有重要意义。
在实际操作中,应结合机器人的具体情况和工作需求,选择合适的零点标定方法及步骤,并严格按照操作规程进行操作,以确保标定的准确性和可靠性。
定期对机器人进行定位精度的检测和验证工作,及时发现并纠正问题,以保障机器人的正常运行。
总结回顾通过本文对库卡机器人的零点标定方法及步骤进行了全面的探讨,我们了解到零点标定是库卡机器人正常运行的基础,其准确性和可靠性对机器人的工作效率和精度至关重要。
kuka零点标定的三种方法KUKA是一家工业机器人制造商,其机器人系统具有高精度和高可靠性。
对于KUKA机器人的零点标定,根据不同的需求和适用性,可以采用以下三种方法:1.传感器标定法:传感器是机器人系统中最常见的零点标定工具,例如激光测距仪、视觉传感器等。
传感器标定法是通过将传感器与机器人坐标系进行对齐,以实现测量精度的提升和机器人系统的定位准确性。
传感器标定法通常包括以下步骤:-标定基准:确定机器人基坐标系和传感器参考系之间的对应关系。
-数据采集:通过传感器测量机器人坐标系的位置和姿态,并记录测量数据。
-参数计算:利用采集到的数据,计算出传感器对应的误差参数,如偏移量、尺度偏差等。
-校正操作:根据计算出的误差参数,对后续的测量结果进行修正或校准,以达到高精度的测量结果。
2.基准板标定法:基准板标定法是一种常用的机器人零点标定方法,通过在工作区域中放置一个已知位置和姿态的标定板,测量机器人末端执行器与标定板之间的相对关系,从而实现机器人的零点标定。
基准板标定法通常包括以下步骤:-放置标定板:将标定板放置在工作区域中,确保标定板的位置和姿态已知。
-机器人运动:通过控制机器人进行一系列运动,使机器人末端执行器触碰到标定板上的关键点位置。
-数据采集:在机器人运动过程中,记录机器人末端执行器和标定板关键点之间的相对坐标信息。
-参数计算:利用采集到的数据,计算出机器人坐标系和标定板坐标系之间的转换矩阵。
-校正操作:应用转换矩阵对后续的机器人运动进行坐标转换,以实现定位和运动控制的高精度。
3.反向运动学标定法:反向运动学标定法是一种通过机器人的运动学模型来进行零点标定的方法。
反向运动学标定法通常包括以下步骤:-数据采集:通过对机器人执行一系列已知位姿的运动,记录机器人末端执行器的位置和姿态。
-反向运动学求解:根据机器人的运动学模型和采集到的数据,求解出机器人运动学模型中的未知参数,如关节角度、杆长等。
-参数计算:利用求解得到的运动学参数,计算出机器人坐标系和末端执行器之间的关系,如正向运动学转换矩阵。
机器人校准标定
机器人校准标定是在机器人开始正式使用前的一项重要任务。
它是从机器人加工技术中抽取重要元素,并将其以准确可靠的方式进行协调,以使每台机器人的性能符合最高要求并能够正常工作的过程。
这里我们将简要介绍机器人校准标定的基本步骤。
一、准备工作
1.确定机器人的基础应用:机器人校准标定首先需要确定机器人的基础应用,例如搬运、焊接、切割或其他复杂应用,以确定校准要求和算法。
2.检查机器人本体、夹具和安全装置:接下来,需要仔细检查机器人本体,以确保它是完整的,夹具是否被安装正确,安全装置是否正常,以及外部传感器是否连接正确。
三、校准标定
1.设置初始坐标系:首先,需要确定机器人的坐标系,根据机器人尺寸和加工要求,综合计算出机器人末端到工件上工作面上抓手工作点的最终位置和姿态。
2.设置可编程关节:其次,根据动作要求,需要调整初始坐标系中的每个关节的可编程参数,如轴动电机的转角,确定机器人末端的姿态。
3.终端调试:最后,需要对机器人进行终端调试,使机器人控装置正确接收控制参数,以实现机器人动作要求,得到更精确的加工效果。
机器人校准标定是一项技术活,需要正确地平衡技术问题与加工要求,在确保机器人本体的安全运行的前提下,为本体提供有效的控制系统,实现更准确的加工任务。
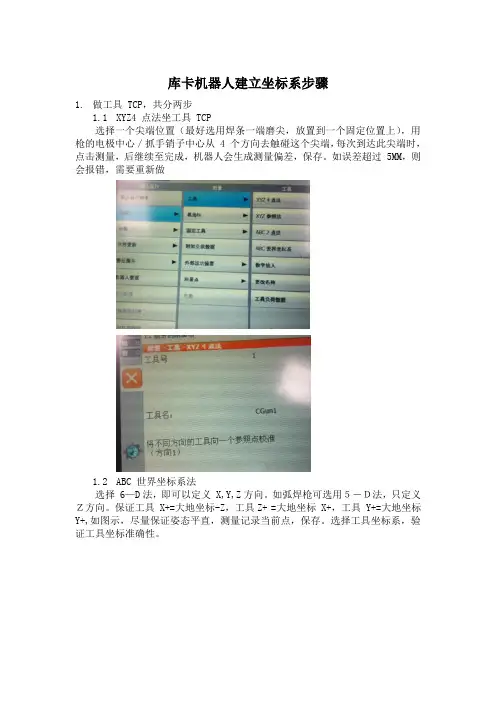
库卡机器人建立坐标系步骤1.做工具 TCP,共分两步1.1XYZ4 点法坐工具 TCP选择一个尖端位置(最好选用焊条一端磨尖,放置到一个固定位置上),用枪的电极中心/抓手销子中心从 4 个方向去触碰这个尖端,每次到达此尖端时,点击测量,后继续至完成,机器人会生成测量偏差,保存。
如误差超过 5MM,则会报错,需要重新做1.2ABC 世界坐标系法选择 6—D法,即可以定义 X,Y,Z方向。
如弧焊枪可选用5-D法,只定义Z方向。
保证工具 X+=大地坐标-Z,工具Z+ =大地坐标 X+,工具 Y+=大地坐标Y+,如图示,尽量保证姿态平直,测量记录当前点,保存。
选择工具坐标系,验证工具坐标准确性。
2用户坐标系世界坐标系在机器人周围的某一个位置上创建坐标系。
其目的是使机器人的运动以及编程设定的位置均以该坐标系为参照。
因此,设定的工件支座和抽屉的边缘均可作为基准坐标系中合理的参照点。
基坐标系测量分两步:确定坐标原点、定义坐标方向1. 在主菜单中选择投入运行 > 测量 > 基坐标系 > 3 点。
2. 为基坐标分配一个号码和一个名称。
用继续键确认。
3. 输入需用其 TCP 测量基坐标的工具的编号。
用继续键确认。
4. 用TCP移到新基坐标系的原点。
点击测量软键并用是键确认位置。
5. 将TCP移至新基座正向X轴上的一个点。
点击测量并用是键确认位置。
6. 将TCP移至XY平面上一个带有正Y值的点。
点击测量并用是键确认位。
7. 按下保存键。
8. 关闭菜单3外部 TCP:用TOOL0移动找出机器人6轴法兰中心的TCP方向。
进入-投入运行—测量—固定工具—工具,输入对应固定工具名称,继续,选择参考工具编号(即已示教出的已知TCP),继续。
选择6D法,继续。
将参考已知工具TCP原点移动至需要测量的外部固定工具TCP 中心点(与方向无关),测量记录。
移动机器人保证刚才已标记出的法兰正方向与需要测量的外部 TCP方向成以下关系:法兰 Z+ = 外部 TCP 的 X-法兰 X+ = 外部 TCP 的 Z+法兰 Y+ = 外部 TCP 的 Y+尽量保持平直方向,测量记录当前点。
机器人零点标定方法机器人零点标定是指在机器人工作之前,准确测量机器人各个关节的角度或位置,并将其设置为零位,以确保机器人运动的准确性。
机器人零点标定是非常重要的,因为机器人关节的角度或位置偏差会影响机器人的精度和稳定性。
下面是一种常见的机器人零点标定方法:1.准备工作在进行零点标定之前,需要将机器人放置在一个安全的位置,并确保机器人的电源处于关闭状态。
还需要为标定过程准备一些工具,如测量工具和电脑。
2.计算器准备启动机器人的计算器,并进行初始化。
这个过程意味着计算器将所有关节角度设置为零。
计算器初始化完成后,它会记录当前的关节位置和角度。
3.运动到初始位置根据机器人的工作空间和需要进行零点标定的关节,选择一个适当的初始位置。
这个位置通常是机器人能够自由运动并不会干扰其他工作的位置。
使用遥控器或计算机指令,使机器人运动到这个初始位置。
4.关节角度测量使用测量工具,如角度测量器或编码器,测量每个关节的角度。
将测量结果记录下来。
5.关节位置测量使用测量工具,如激光测距仪或测量尺,测量每个关节的位置坐标。
这些坐标可以是直角坐标系或极坐标系。
将测量结果记录下来。
6.存储角度和位置数据将测量到的关节角度和位置数据存储在机器人的计算器中。
这样,机器人的计算器就能够记住这些零点数据,并在工作期间使用它们来校准机器人的位置和角度。
7.验证零点标定在完成零点标定后,可以进行一些验证工作来确保标定的准确性。
例如,将机器人移动到其他位置,然后再将其移动回零点位置,看看是否能够准确返回。
如果返回的位置有误差,可能需要重新核对和调整标定数据。
需要注意的是,机器人的零点标定可能因不同类型的机器人而有所不同。
一些机器人可能只需要标定关节角度,而一些机器人可能需要同时标定关节角度和位置。
此外,随着机器人的使用和时间的推移,可能需要定期检查和校准机器人的零点,以确保其精度和性能。
总之,机器人零点标定是机器人工作之前的重要步骤,通过准确测量和记录机器人关节的角度和位置,能够提高机器人的精度和稳定性。
kuka零点标定的三种方法【实用版4篇】目录(篇1)第一部分:引言本文介绍了KUKA零点标定的三种方法,旨在帮助读者了解如何进行零点标定,以提高机器人的精度和稳定性。
第二部分:方法一:手动零点标定法该方法通过手动调整机器人的关节来实现零点标定。
具体步骤包括:将机器人放置在平坦表面上,调整各关节角度,记录各关节角度,然后将机器人移动到指定位置,验证零点标定的准确性。
第三部分:方法二:自动零点标定法该方法通过KUKA机器人软件进行零点标定。
具体步骤包括:将机器人放置在平坦表面上,设置零点标定的参数,启动零点标定程序,等待零点标定完成,然后将机器人移动到指定位置,验证零点标定的准确性。
第四部分:方法三:软件零点标定法该方法通过KUKA机器人软件进行零点标定。
具体步骤包括:将机器人放置在平坦表面上,设置零点标定的参数,启动零点标定程序,等待零点标定完成,然后将机器人移动到指定位置,验证零点标定的准确性。
正文(篇1)KUKA零点标定的三种方法KUKA机器人是一种常见的工业机器人,其精度和稳定性对于生产至关重要。
为了确保机器人的正常运行,需要进行零点标定。
本文介绍了KUKA零点标定的三种方法。
第一种方法是手动零点标定法。
该方法通过手动调整机器人的关节来实现零点标定。
具体步骤如下:将机器人放置在平坦表面上,调整各关节角度,记录各关节角度,然后将机器人移动到指定位置,验证零点标定的准确性。
这种方法需要较高的操作技能和经验,操作过程比较繁琐。
第二种方法是自动零点标定法。
该方法通过KUKA机器人软件进行零点标定。
具体步骤如下:将机器人放置在平坦表面上,设置零点标定的参数,启动零点标定程序,等待零点标定完成,然后将机器人移动到指定位置,验证零点标定的准确性。
这种方法自动化程度较高,操作简单,但需要安装相应的软件和硬件设备。
第三种方法是软件零点标定法。
该方法通过KUKA 机器人软件进行零点标定。
具体步骤如下:将机器人放置在平坦表面上,设置零点标定的参数,启动零点标定程序,等待零点标定完成,然后将机器人移动到指定位置,验证零点标定的准确性。