基于FPGA的电脑横机控制器设计
- 格式:pdf
- 大小:100.39 KB
- 文档页数:2
第一章绪论1.1研究背景与国内外现状1.1.1引言纺织机械包括纺纱机械、织造机械、针织机械等几个大类,电脑横机是一种由电脑控制、自动化程度很高的纬编针织机械,主要用于针织服装和工艺品的编织制造,主要用户为羊毛/绒衫(裤1及手套生产厂家,尤其是高档产品一羊绒制品的生产厂家。
电脑横机除了可以用于传统的棉、毛针织外,还可用于山羊绒、天然丝、麻、兔毛以及晴纶、锦纶等人造纤维和混纺面料的针织【l】111l。
近年来,在各种纺织机械展览会上,电脑横机不断以崭新的面貌出现,其创意革新和技术细节的改变,与其他针织机械相比尤甚,特别是伴随着计算机技术的迅猛发展,横机的电子计算机化已成为一个重要趋势。
当今的新型全成型电脑横机能够编织出整件针织服装,由于采用计算机设计和编程,可以从纱线直接制成成衣(裤)等成品,而且花色、款式变化多、式样的适应性强。
更为重要的是,电脑横机的生产效率非常高,是一般手动横机的4—5倍,编织速度快、生产周期短,能够进行多品种、小批量的生产,能够满足快速应对市场变化需要,而这一点正是当前快速多变的服装市场对于服装生产企业的要求。
但目前市场上的横机控制器大多数使用单片机作为主处理器或者以工控机为基础开发而来的,前者集成度不高,稳定性也不好,而后者成本较高。
为此,笔者提出了一种新型的基于ARM的嵌入式横机控制器,解决了上述问题。
1.1.2电脑横机的发展过程横机是一种平型纬编针织机,…直以来它是羊毛、羊绒、衫织物生产的主要机种。
横机的发展史可以追溯到19世纪中叶,到了20世纪初,机械式控制的技术得到了肯定。
第一台电子控制的横机,如德国sTOLL公司的AW和DsTR机型,是在1975年意大利米兰的ITMA国际纺织机械展览会中首先展出。
四年后,sTOLL公司展出了第一台电脑横机(cNcA一3)和世界上第一个花型准备VDu(visualDisplayunit)。
电子技术在横机上的应用开始于20世纪70年代初。

基于FPGA的步进电机控制器设计步进电机是一种常见的电动机,具有精准控制和高可靠性的特点。
而FPGA(Field Programmable Gate Array)是一种可编程逻辑器件,可以实现复杂逻辑功能。
结合FPGA和步进电机进行控制,可以实现更高精度和更灵活的控制方式。
首先,步进电机的控制需要确定三个参数:步进角度、步进速度和步进方向。
FPGA可以通过编程的方式实现对这些参数的实时控制。
基于FPGA的步进电机控制器设计需要实现以下几个模块:1.步进电机驱动器:这个模块负责将FPGA输出的控制信号转换为适合步进电机的电压和电流。
可以使用高驱动能力的电路来驱动步进电机,确保电机可以正常运行。
2.位置控制器:这个模块负责根据输入的步进角度和方向控制步进电机的转动。
可以使用计数器和比较器来实现精确的角度控制,通过FPGA 的编程方式可以实时调整步进角度和方向。
3.速度控制器:这个模块负责调整步进电机的转动速度。
可以使用定时器和计数器来实现一个精确的时间基准,通过调整计数器的数值来控制步进电机的速度。
FPGA的编程方式可以实时调整步进速度。
4.通信接口:这个模块负责与外部设备进行通信。
可以使用UART、SPI或者I2C等通信协议,通过FPGA的外部接口与其他设备进行交互。
以上几个模块可以通过FPGA内部的硬件描述语言(如VHDL或Verilog)进行编程实现。
通过FPGA的编程方式,可以实时调整步进电机的控制参数,提高步进电机的精度与稳定性。
但是,基于FPGA的步进电机控制器设计也存在一些挑战。
首先是硬件资源的限制,FPGA的资源有限,需要合理分配资源,确保系统的运行效率和稳定性。
其次是时序设计的复杂性,步进电机的精确控制需要高频率的脉冲信号,要求FPGA具备快速响应和高速计数的能力。
综上所述,基于FPGA的步进电机控制器设计可以实现精确控制和高可靠性,并且具有灵活性和可编程性,可以适应不同的应用场景。

刍议电脑横机控制系统的设计与开发摘要:本文针对国产电脑横机控制系统的组成结构和实现原理,介绍了一种全自动电脑横机控制系统的新型分层体系设计。
我国的电脑横机控制系统的技术水平依然存在很多不足之处。
通过分析此系统的不足之处,在分析借鉴国际先进机型的基础上,提出了相应的改进措施,真正实现自动化和智能化设计。
关键词:电脑横机控制系统设计开发电脑横机系统作为针织行业的重要装备,是当前羊毛衫生产行业的最主要机种。
电脑横机系统可以根据不同的针织编织的要求,输入其相应的信号和发出各种控制指令,通过送纱系统、传动系统、摇床系统、密度调节系统、编织系统、牵拉系统之间的协调动作实现编织工作。
当今社会,随着科技的快速发展,电脑横机系统高速化、智能化、自动化、连续化水平也在不断提高。
由于系统的控制器的技术水平可以直接决定针织产品的竞争力,因此,横机控制系统的组成结构以及不足之处成为当前研究的热点所在。
1 国产电脑横机控制系统的结构电脑横机系统通过主控单元、机头控制单元等实现机头运转、控制摇床、送纱编制等功能。
在保证各个动作协调有序的前提之下,各控制单元间进行有效的数据传递。
1.1 主控单元电脑横机系统控制软件可以完成工艺文件管理、人机交互、解析控制指令输出等功能。
在主控单元的指控命令下,起底板单元和机头单元可完成相应的动作。
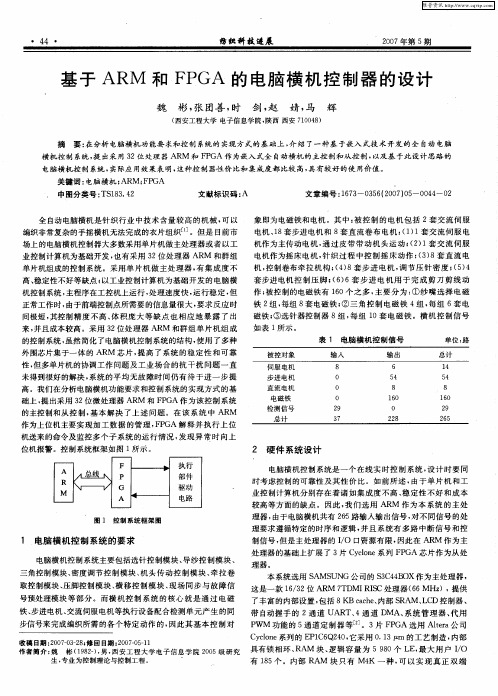
横机系统的主控单元通过串行总线,在起底板单元以及机头单元的配合协调工作下,发送控制指令,并且接收反馈信息,实现整机动作的控制。
由此可见,主控单元是控制系统的核心所在。
1.2 机头控制单元机头控制单元是以DSP为核心,辅助以大量开关量输出、多路步进电机驱动电路的独立单元。
机头控制单元的控制器带动针板做往复运动。
在对于数据进行解析后,机头控制单元驱动机头进行编织。
机头中,探针作为检测机构,用于检测编织中出现冒布等异常状况。
使用电磁铁在短时脉冲电压的驱动作用下,保持原有的动作状态,减少线圈的发热并且降低能耗。

毕业设计(论文)-基于FPGA的电机控制————————————————————————————————作者:————————————————————————————————日期:基于FPGA的电机控制指导老师:设计了一个基于现场可编程门阵列(FPGA)的电机控制系统。
简单介绍了步进电机和直流电机的工作原理和工作特点,并根据两种电机的不同特性设计了基于FPGA的不同的控制电路:以改变频率来控制步进电机的转速;调节脉冲的占空比大小改变输出电压的大小,从而达到控制直流电机的转速的目的。
关键字:FPGA 步进电机直流电机电机控制PWMDesign of the Motor-Control Based on FPGAAbstract: the electromotor control system is designed based on FPGA. This paper simply introduces the principle and the characrers of current-motor and step-motor.And what’s more,different control circuits based FPGA are designed accordering to the different characteristic of current-motor and step-motor. The rotate speed of step-motor is controlled by changing frequency .The output-voltage changes accordering to the rate of impulses,and so the aim to control the rotate of current-motor achieve.Keyword : step-motor motor-control PWM FPGA目录1.系统设计 (3)1.1功能介绍 (3)1.2电机控制简介 (3)1.2.1步进电机的控制 (3)1.2.2直流电机的控制 (3)1.3总体设计方案 (4)1.3.1总体设计思路 (4)1.3.2方案论证与比较 (4)2.单元电路设计 (7)2.1.步进电机驱动电路 (7)2.2.直流电机驱动电路 (8)3.软件设计 (8)3.1实现方法 (8)3.2 程序流程图 (9)4.系统测试 (10)5.结论及参考文献 (10)5.1.结论: (10)5.2.参考文献: (10)6.附录 (10)前言步进电机:一般,电动机都是连续旋转,而步进电动机却是一步一步转动的。

基于FPGA的步进电机控制器设计步进电机是一种常用于机械和自动化控制系统中的执行器。
它们以很高的精度和可控性而闻名,广泛应用于各种领域中。
而FPGA(现场可编程门阵列)是一种可编程逻辑器件,具有高度灵活性和可重构性。
结合这两个技术,可以设计出一种高性能的步进电机控制器。
首先,步进电机控制器的主要功能是对步进电机进行驱动和控制。
步进电机的控制与其他类型电机的控制有所不同,它们是通过依次激活电机的相来实现转动。
因此,步进电机控制器需要能够根据给定的输入信号,准确地控制电机的转动步数和方向。
FPGA可以提供一个灵活的平台,用来实现步进电机控制器的各种功能。
它可以通过编程来定义电机控制逻辑,并且可以实时地响应外部输入信号。
此外,FPGA还可以同时控制多个步进电机,实现多轴控制。
为了设计一个基于FPGA的步进电机控制器,首先需要了解步进电机的工作原理和控制方式。
步进电机通常由多个电磁线圈组成,当这些线圈被激活时,电机会发生位置变化。
步进电机有两种常见的控制方式,分别是全步和半步控制。
全步控制是每次只激活一相,而半步控制是每次激活两相,以获得更高的分辨率。
接下来,需要使用HDL(硬件描述语言)编写FPGA的控制逻辑。
例如,可以使用Verilog或VHDL语言来描述步进电机的控制方式以及电机运动的算法。
编写的代码应该能够解析输入信号,并根据需要通过适当的时序生成电机的驱动信号。
在设计步进电机控制器时,还需要考虑速度和位置的反馈。
可以通过添加编码器或传感器来获取电机的位置信息,并将其反馈到FPGA中进行闭环控制。
这样可以实现更高的精度和可重复性。
此外,步进电机控制器还可以与其他系统进行通信,例如PC或PLC。
可以使用串行通信协议(如SPI或UART)来实现与外部系统的数据交换。
这样,用户可以通过外部系统发送命令和接收反馈,实现更高级别的控制和监控。
最后,为了验证步进电机控制器的功能和性能,需要进行仿真和实验。
可以使用FPGA开发板和步进电机进行实际测试,检查控制器的工作是否符合预期。

基于fpga的pid控制器的设计与实现
基于FPGA的PID控制器的设计与实现可以分为以下几个步骤:
1. 确定PID控制器的输入和输出。
PID控制器的输入一般为被
控对象的当前状态以及目标状态,输出为控制信号。
根据具体应用场景确定PID控制器的输入和输出。
2. 设计PID控制算法。
PID控制算法是PID控制器的核心,可以根据被控对象的数学模型和控制要求来设计。
常见的PID
控制算法包括增量式PID控制算法、位置式PID控制算法等。
3. 在FPGA上实现PID控制器。
首先,根据PID控制算法设
计PID控制器的结构,包括比例(P)、积分(I)和微分(D)三个部分。
然后,使用硬件描述语言(如Verilog或VHDL)
来实现PID控制器的功能,并根据需要进行时钟与时序设计。
最后,编译、综合和实现设计,生成可在FPGA上运行的bit
文件。
4. 连接被控对象与FPGA。
将FPGA的输出信号连接到被控对
象的执行机构上,确保PID控制器的输出能够对被控对象产
生控制作用。
5. 调试与优化。
通过实际测试和调试,验证PID控制器的性能,并根据实验结果进行调整和优化,以达到预期的控制效果。
值得注意的是,在设计和实现基于FPGA的PID控制器时,
需要根据具体的应用需求和系统环境进行合理的设计和调整,以充分发挥FPGA在高速、实时控制方面的优势。

基于fpga的pid控制器设计基于FPGA的PID控制器设计在现代工业自动化领域中,PID(比例-积分-微分)控制器被广泛应用于各种控制系统中。
PID控制器可以通过对系统的误差进行连续的测量和调整,实现对系统的稳定控制。
而基于FPGA的PID控制器设计,则可以将PID控制算法实现在可编程逻辑器件上,提供更高的计算性能和灵活性。
在实际的FPGA PID控制器设计中,首先需要对被控对象进行建模和参数的测定。
建模是指将实际的被控对象转化为数学模型,以便进行控制算法的设计和仿真。
参数测定是指通过实验或模型辨识的方法,确定PID控制器中的比例、积分和微分参数,以使得系统的控制性能最优。
接下来,需要将PID控制算法实现在FPGA芯片上。
FPGA芯片具有高度可编程性和并行性,能够提供更快的响应和更高的计算性能。
通过使用硬件描述语言(HDL)如VHDL或Verilog,可以将PID控制算法转化为FPGA上的逻辑电路,并通过时钟信号进行同步。
在FPGA上实现PID控制器的关键是如何将连续的控制算法转化为离散的电路。
其中,采样周期的选择是一个重要的考虑因素。
采样周期应根据被控对象的动态特性和控制要求进行选择,以保证系统的稳定性和控制性能。
一般来说,较短的采样周期可以提高控制的灵敏度,但也会增加系统的计算负载。
除了采样周期外,PID控制器的输出还需要进行数字到模拟的转换,以控制外部执行机构。
这可以通过使用数字-模拟转换器(DAC)来实现。
DAC可以将FPGA输出的数字信号转化为模拟电压或电流,以驱动执行机构。
为了验证PID控制器的设计和性能,可以通过在FPGA上进行仿真和实际实验来进行验证。
仿真可以通过在FPGA开发板上加载控制程序,并对模拟或实际的被控对象进行测试。
实验则是将FPGA控制器与实际的被控对象连接,以验证其在实际环境中的控制性能。
基于FPGA的PID控制器设计是一项复杂而又重要的工作。
它不仅需要对被控对象进行建模和参数测定,还需要将PID控制算法转化为FPGA上的逻辑电路,并进行数字到模拟转换。

新型嵌入式电脑横机控制器的设计的开题报告
一、背景介绍
随着工业自动化和信息化的发展,横机在现代制造业中越来越普遍,其对治具和芯片的精度要求也越来越高。
传统的控制器设计难以满足现代横机的需求,需要一种
全新的嵌入式电脑控制器来提高横机的精度和稳定性。
二、研究目的
本研究旨在设计一种新型嵌入式电脑横机控制器,实现横机的高精度控制,提升横机的生产效率和稳定性。
三、研究内容
1. 确定控制器的性能指标:包括控制精度、响应时间等。
2. 设计控制器的硬件和软件系统:选用高性能处理器和大容量存储器,结合优化的程序算法实现高效稳定的控制。
3. 建立控制器的通讯接口:支持多种通讯协议,以便与其他设备联网交互数据。
4. 进行实验验证:对设计的控制器进行实际应用测试,分析控制器的性能和可靠性,不断优化改进。
四、研究意义
本研究的成果将有助于提升横机的生产效率和稳定性,提高工业自动化水平,推动制造业转型升级。
同时,设计的嵌入式电脑控制器也可应用于其他工业生产领域,
具有广泛的应用前景。
五、研究方法
本研究采用文献调研和实验验证相结合的方法,通过查阅相关文献了解现有技术,设计并实现具有自主知识产权的新型嵌入式电脑横机控制器,进行实际应用测试和性
能评估。
六、预期成果
设计实现一款全新的嵌入式电脑横机控制器,具有高精度、稳定性强、通讯性能好等特点,为制造业提供高效稳定的控制解决方案。
![毕业设计(论文)-电脑横机设计[管理资料]](https://img.taocdn.com/s1/m/dbf73d868e9951e79a892771.png)
摘要横机是针织行业中生产成形产品的一类机械设备,随着电脑科技和机电一体化技术的发展,电子控制代替人工控制已经是一种趋势,电脑横机应运而生。
电脑横机的出现是横机业的一次重大革命,它不仅可以实现电子控制,在加工花型及产品质量方面都有了质的飞越。
随着经济的发展,电脑横机取代手动横机是必然趋势。
人们对电脑横机产品的要求也越来越高,组织结构的研发也就显的非常重要。
本文主要利用江苏金龙公司的龙星电脑横机和德国STOLL公司CMS系列的电脑横机,探讨了几种典型常规组织花型的编织工艺,开发了几种较有特色的组织花型,并就其特点和性能进行了分析和探讨。
希望这些花型的开发有助于电脑横机的应用,有助于毛衫产品的开发,提高毛衫的时尚性、独特性和附加值。
关键词:针织;电脑横机;组织结构;产品设计ABSTRACTThe flat knitting machine is a kind of mechanical device in the knitting profession produces the formation product, along with the computer science and the integration of machinery technology's development, the electronic control replaced the manual control already was one tendency, the computer flat knitting machine arises at the historic moment. the computer flat knitting machine appearance was a flat knitting machine industry secondary load Great Revolution, it not only might Implemented the electronic control, had the archery target leap in the processing flower product and the product quality aspect, but also along with the computer horizontal machine renewal, its unceasing developed toward the intellectualized direction. Along with the economical development, the computer flat knitting machine substitution manual flat knitting machine is the inevitable trend. The people are also getting higher and higher to the computer flat knitting machine product's request, structure research and development also on necessity obviously.This article mainly unifies Jiang Su Jin long Corporation's Long Xing the computer flat knitting machine as well as German STOLL Corporation CMS series computer flat knitting machine, and the more popular group figured joins own design at present the basic group figured, carries on the design processing, and carries on the discussion and the analysis on its Features and the performance, hoped that some flowers can enhance sweater's value in the application process, enhances sweater's fashionable, the Uniquely. Enhances sweater's value.Key words:the knitting;the computerized flat knitting machine;pattern design;knitting structure目录前言 0第一章电脑横机的发展及其主要特征 0 0 (2)第二章常规产品的编织 (5) (5) (6)第三章特殊产品的研发 (27) (27) (32) (34) (37) (37) (40) (41) (43) (44) (45) (47) (49)结论 (51)参考文献 (52)附录 (53)谢辞 (61)前言电脑横机是针织业的一场革命,电脑横机作为较为先进的生产设备,它的产品组织结构的研发也逐渐被重视,如果电脑横机能够编织出复杂的手工织品,那么将大大降低成本,同时有利于该组织的普及。

第12卷 第2期集美大学学报(自然科学版)Vol .12 No .2 2007年4月Journal of J i m ei University (Natural Science )Ap r .2007 [收稿日期]2005-10-27[作者简介]陈建容(1967-),男,实验师,从事电子技术研究.[文章编号]1007-7405(2007)02-0155-06基于FPG A 的多模式步进电机控制器的设计陈建容,叶文才(集美大学信息工程学院,福建厦门361021)[摘要]应用FPG A 器件设计了多模式步进电机控制器,描述了应用A ltera 公司FPG A 编程软件QuartusⅡ411设计控制器各功能模块的过程以及调试方法,并成功地在FPG A 器件上验证了设计的可行性.[关键词]步进电机;FPG A;控制器;Quartus Ⅱ[中图分类号]TP 276[文献标识码]A0 引言步进电机作为执行元件,是机电一体化的关键产品之一,具有运动精确、无累积误差、动态响应特性好、易于正反向旋转及在低速情况下输出较大力矩等特点,广泛应用于各种自动化控制系统中.原来步进电机控制系统多采用分立元件或者小规模集成电路组合而成,不仅安装调试复杂,需要消耗大量元器件,而且产品一旦定型之后,要改变控制方案就一定要重新设计电路.随着微电子技术的进步以及各应用领域多样化的需要,促使集成电路向高速、高集成度、低功耗的系统集成方向发展.20世纪末,FPG A (Field Pr ogra mmodle Gate A rray )器件得到了广泛的应用,采用FPG A 器件设计步进电机控制器具有编程简单、运行高速、可靠性高、功能强、开发期短等优点[1].1 步进电机的种类及其各种工作模式步进电机又叫脉冲电机,也就是根据给予脉冲的数量和频率来决定步进电机转动位移的大小和运行的速度.根据电源供给情况可以分成单极性和双极性两种,一般采用单极性的直流电源较普遍.根据绕组的多少有三、四、五、六相等多种,而对于不同的步进电机又可工作于单相通电、双相通电或双相交互通电等多种方式.以三相步进电机为例就有单3拍、双3拍和三相6拍等3种工作模式[2].111 单3拍工作方式步进电机正转时,通电顺序为A -B -C -A,各相通电的电压波形如图1所示.步进电机反转时,通电顺序为A -C -B -A.112 双3拍工作方式步进电机的通电顺序为AB -BC -CA -AB.113 三相6拍的工作方式三相6拍工作方式的通电顺序为A -AB -B -BC -C -CA -A ,对于四相步进电机则有单4拍、双4拍和四相8拍等工作模式.集美大学学报(自然科学版)第12卷2 多模式步进电机控制器设计方案根据步进电机的工作原理,以三相、四相电机控制器为例设计了如图2所示的控制器原理图.图2主要包括3部分功能模块.数据分配器通过模式选择信号sel0、sel1将外部脉冲送入相应的功能控制模块;功能模块是实现功能的核心模块,通过功能模块实现不同的模式控制;数据选择器通过模式选择信号,根据不同的模式功能,选择该功能模块的信号输出.图2中共用到4个数据选择器,数据选择器a 选择输出步进电机A 相信号输出,输入、输出的连接线在示意图(见图2)中全部画出,数据选择器b 、c 选择输出步进电机B 相和C 相信号,连接线方式相同于数据选择器a,这里省略.数据选择器d 输出步进电机D 相脉冲,只用于四相步进电机,所以只输入四相电机控制模块的D 3、D 4信号,其他输入端直接接地.本设计可实现8种模式的步进电机控制,如果要实现更多种模式步进电机的控制,只要将1~4数据分配器改为1~8数据分配器,将4选1数据选择器改为8选1数据选择器,然后再增加相应的模式控制模块就可以扩展到16种控制模式[3].211 数据分配器的设计图3是数据分配器的RT L 电路,应用synp lify 软件加载VHDL 文件直接转换为RT L 电路.数据分配器根据给定的选择信号sel0和sel1控制输入的时钟信号clk,按照设定的从Y 0、Y 1、Y 2、Y 3中的一路输出,输送给相应的模式控制模块.sel0、sel1取值为00时从Y 0输出,01则从Y 1输出,10从Y 2输出,11从Y 3输出.在写VHDL 程序时定义电路的输入和输出变量名称、数据类型,考虑到初始状态其输出应为0,所以在进程的开始要置输出均为0.针对不同的选择信号,电路从不同的输出端口输出从输入端送进来的时钟信号,这就可以使用CASE 语句来实现,若所有条件语句中的选择值不能完整覆盖CASE 语句中表达式的取值,则最末一个条件句中的选择必须用“others ”表示,其目・651・ 第2期陈建容等:基于FPG A的多模式步进电机控制器的设计的是为了使条件语句中的所有选择值能涵盖表达式的所有取值,以免被插入不必要的锁存器.这一点对于定义为ST D _LOGI C 和ST D _LOGI C_VECT OR 数据类型的值尤为重要.除此之外,条件句中的选择值必在表达式的取值范围中,每一条件句的选择值只能出现一次,不能有相同选择值的条件语句出现,执行中必须选中且只能选中所列条件语句中的一条.包装元件入库变成一个包装好的单一元件sy mbol,并放置在工程路径指定的目录中以备总模块调用.212 模式控制模块的设计各模式控制模块的设计基本类似,现以三相双3拍控制模块的设计为例,说明设计过程.该模块控制步进电机工作于三相状态,每次同时给两相通电,需要有一个复位信号,当复位信号高电平时,状态机[4]就回到起始状态.图4是该模块的状态机.图4中共有4个状态:ST0(起始状态)、ST1(A 、B 两相通电状态)、ST2(B 、C 两相通电状态)、ST3(C 、A 两相通电状态).U _d1为方向信号.步进电机的运行方式为:状态机起始或是被复位(en1=‘1’)都处于ST0(起始状态),此时输出端为“000”,步进电机不运转.当脉冲到来,而且U _d1恒为高电平时,状态机将按下列顺序转换:ST0状态→ST1状态→ST2状态→ST3状态→ST1状态,对应步进电机的绕组通电顺序是AB →BC →CA →AB ,而输出端分别输出“000”→“011”→“110”→“101”→“011”;若是U _d1为低电平,状态机转换顺序变为:ST0状态→ST2状态→ST1状态→ST3状态→ST2状态,步进电机的绕组通电顺序是CB →BA →AC →CB ,输出:“000”→“110”→“011”→“101”→“110”.将该模块包装为一个sy mbol 以备总模块调用.213 数据选择器模块设计数据选择器实现对一台步进电机的旋转模式进行控制,而该模块的功能就是实现在不同选择信号下,输出不同的旋转模式控制信号.该模块的输入信号有选择信号sel[0]和sel[1](与上述数据分配器的sel 是同一个信号)、a [2..0]、b[2..0]、c[3..0]和d[3..0],输出信号只有f [3..0].当sel 为“00”时对应单3拍输出模式的输出,即让步进电机按照单3拍模式运行;当sel 为“01”时对应步进电机按双3拍模式运行;当sel 为“10”时步进电机按三相7拍模式运行;当sel 为“11”时按双4拍模式运行.其RT L 电路如图5所示,un1_sel 等4个与门由选择信号sel 构成,进程中的if 语句形成了其中的多路选择器.将该模块包装为一个sy mbol 以备总模块调用.・751・集美大学学报(自然科学版)第12卷214 模块集成各功能模块设计完成后,连接生成总的功能模块,实现设计功能.生成后的总模块如图6所示.对涉及的外部端口做一个说明:1)时钟脉冲信号clk (输入):步进电机运行的依据,一个脉冲相当于给步进电机绕组通电一次,驱动步进电机旋转.2)模式选择信号sel [1..0](输入):既作为数据分配器的选择信号,也作为数据选择器的选择信号.为输入数据分配器的时钟脉冲信号clk 选择输出端,传送到选定的转换模块,并将其转换后的控制序列从数据选择器中选定输出,直接控制步进电机运转.3)正/反转控制信号U _d (输入):连接各个模式控制块,控制步进电机的运转方向.4)使能信号en (输入):该信号也连接系统的各个模式控制块,控制步进电机的停止/运行,当它为高电平时,步进电机停止运转.5)各相绕组通/断信号线f [3..0]:f [0]控制电机的A 相绕组;f [1]为B 相绕组的控制信号;f [2]输出控制C 相通/断;f [3]控制D 相绕组.当输出为‘1’时,代表对绕组通电,从而实现了对步进电机的运行模式控制.输入时钟信号clk 由sel 选择信号决定其从数据分配的4个输出端Y 0、Y 1、Y 2、Y 3中的一个输・851・ 第2期陈建容等:基于FPG A 的多模式步进电机控制器的设计出,图6中4个模式控制模块的复位信号(en0、en1、en2、en3)由同一个复位信号en 来控制,正/反方向控制信号U _d 连接4个模式控制模块的方向控制信号(U _d0、U _d1、U _d2、U _d3),而4个模式控制模块的输出接到数据选择器的4个输入端,由前面的sel 选择信号决定是哪路数据输出,用以控制步进电机旋转模式.3 系统调试311 时序仿真调试调试主要运用A ltera 公司的Quartus II 411软件进行各个模块的时序仿真以及Cycl one 器件EP 2I C6Q240C8实现总模块的下载调试.具体操作:先打开各个模块的VHD 文件置顶并进行编译,之后新建一个波形文件,设置其输入信号与仿真时间,保存文件,在assignments →settings step →si m ulat or 选择要仿真的波形文件并设置E ND TI M E,然后就可以进行仿真了.通过对各个模块的时序仿真波形进行分析(具体方法如前各模块设计所述),达到设计要求后,就可以对总模块进行时序仿真[5].总模块的时序仿真图如图7和图8所示.在图7中说明了步进电机4种不同的运行模式.具体分析如下:当U _d 为高电平时,假定此时步进电机的方向为正方向,当sel 为“00”时输出端将输出步进电机工作在三相状态下运转模式1的序列(A →B →C →A );当sel 为“01”时输出按模式3旋转的序列(AB →BC →CA →AB );当sel 为“10”时输出模式5的控制序列(A →B →C →A );最后当sel 为“11”时输出模式7的控制序列(AB →BC →CD →DA →AB ).图8说明了另外的4种模式.具体分析如下:此时U _d 为低电平可以认为电机是反方向旋转,当sel 为“00”时按模式2输出序列:C →B →A →C;当sel 为“01”时按模式4输出序列:CB →BA →AC →CB;当sel 为“10”时按模式6输出序列:D →C →B →A →D;当sel 为“11”时按模式8输出序列:DC →CB →BA →AD →DC .注意到:当en 信号为高时,该系统的输出均为0,这是因为在连接总模块电路图时把各个模式控制模块的复位信号用同一个使能信号来控制,这样当步进电机的运转出现问题时可以马上停止.・951・集美大学学报(自然科学版)第12卷312 下载到实际FPG A 器件上进行工程调试使用Quartus II 的软件成功编译设计工程之后,就可以对A ltera 器件进行编程或配置了.Quartus II 编译器的A sse mbler 模块自动将适配过程的器件、逻辑单元和引脚分配信息转换为器件的编程图像,并将这些图像以SRAM 对象文件(1s of )的形式保存为编译文件,Quartus Ⅱ软件的编程器(Pr ogra m 2mer )使用该文件对器件Byte B laster M V 进行编程配置.配置完成便可以下载到FPG A 器件进行调试.工程调试在G W 48S OPC /E DA 开发系统上完成.将程序下载到该开发系统中的FPG A 器件EP 2I C6Q240C8中,加入输入脉冲,选择信号用开发器上的模拟开关替代,将模块输出信号通过一级功率驱动,能很好完成对各种模式三相和四相的小功率步进电机的控制功能,取得满意的效果.因此,只需一片FPG A 芯片就能根据需要设计出多种模式的步进电机控制器.本研究的步进电机控制器与传统的步进电机控制器比较具有电路简单、设计容易、性能稳定等优点.[参考文献][1]任爱锋,初秀琴,常存.基于FPG A 的嵌入式系统设计[M ].西安:电子科技大学出版社,2004.[2]陈隆昌,阎治安,刘新正.控制电机[M ].西安:西安电子科技大学出版社,2004.[3]李峻,张俊儒.电机控制集成电路的原理[M ].北京:冶金工业出版社,1995.[4]潘松,黄继业.E DA 技术实用教程[M ].北京:科学出版社,2003.[5]杨刚,龙海燕.现代电子技术———VHDL 与数字系统设计[M ].北京:电子工业出版社,2004.D esi gn of a M ulti 2m ode Stepp i n g M otor Con troller by the FPGACHE N J ian 2r ong,YE W en 2cai(School of I nf or mati on Engineering,J i m ei University,Xia men 361021,China )Abstract:A multi 2mode stepp ing mot or contr oller was designed by the FPG A instru ment .The design p r ocess of each functi onal bl ock of the contr oller devel oped by the s oft w are Quartus Ⅱ411devoted t o the A l 2tera Co mpany πs FPG A devel opment was described .Its feasibility was successfully validated in the FPG A in 2stru ment .Key words:stepp ing mot or;FPG A;contr oller;Quartus Ⅱ(责任编辑 朱雪莲)・061・。