3.1WMD-PFS控制系统
- 格式:pdf
- 大小:4.96 MB
- 文档页数:18
DCS分散控制系统中英文对照DCS分散控制系统中英文对照DCS---------------- 分散控制系统BTG----------------常规摸拟仪表RUNBACK------------自动快速减负荷RUNRP-------------- 强增负荷RUNDOWN------------强减负荷FCB----------------快速甩负荷MFT---------------- 锅炉主燃料跳闸TSI----------------汽轮机监测系统ETS----------------汽轮机紧急跳机系统TAS---------------- 汽轮机自启动系统AGC----------------自动发电控制ADS----------------调度自动化系统CCS---------------- 单元机组协调控制系统FSSS---------------锅炉炉膛安全监控系统BMS----------------燃烧管理系统SCS----------------顺序控制系统MCC----------------调节控制系统DAS---------------- 数椐采集系统DEH----------------数字电液调节系统MEH----------------给水泵汽轮机数字电液调节系统BPS----------------旁路控制系统DIS----------------数字显示站MCS---------------- 管理指令系统BM-----------------锅炉主控TM-----------------汽轮机主控DEB---------------- 协调控制原理ULD----------------机组负荷指令ABTC---------------CCS的主控系统MLS---------------- 手动负荷设定器BCS----------------燃烧器控制系统PLC----------------可编程控制器UAM---------------- 自动管理系统MTBF---------------平均故障间隔时间MTTR---------------平均故障修复时间SPC---------------- 定值控制系统OPC----------------超数保护控制系统ATC----------------自动汽轮机控制ETS---------------- 汽轮机危急遮断系统AST----------------自动危急遮断控制IMP----------------调节级压力VP----------------- 阀位指令FA-----------------全周进汽PA-----------------部分进汽LVDT--------------- 线性位移差动转换器UMS----------------机组主控顺序TMS----------------机主控顺序BMS---------------- 炉主控顺序BFPT---------------给水泵汽轮机PID----------------比例积分微分调节器BATCHDATA---------- 批数椐节STEPSUBOUTINE------步子程序节FUNCTIONSUBOUTINE--功能子程序节MONITORSUBOUTINE--- 监视子程序节MCR----------------最大连续出力ASP----------------自动停导阀LOB---------------- 润滑油压低LP-----------------调速油压低LV-----------------真空低OS----------------- 超速PU-----------------发送器RP-----------------转子位置TB--------------- 轴向位移DPU----------------分散控制单元MIS----------------自动化管理信息系统DEL----------- 数据换码符DTE----------------数据终端设备DCE---------------数据通信设备RTU--------------- 远程终端TXD---------------发送数据RXD----------------接收数据RTS------------ 请求发送CTS---------结束发送DSR-------------数据装置准备好DTR----------- 数据终端准备好WORKSTATION------工作站DATAHIGHWAYS--------数据高速公路DATANETWORK------ 数据网络OIS-----------操作员站EWS----工程师站MMI---人机接口DHC------------- 数据高速公路控制器FP-----------功能处理器MFC----------多功能处理器NMRR----差模抑制比CMRR-------共模抑制比OIU-----------操作员接口MMU-----------端子安装单元CIU-----------计算机接口单元COM-----------控制器模件LIM------------回路接口模件LMM----------逻辑主模件BIM----------总线接口模件AMM---模拟主模件DSM--------- 数字子模件DLS----数字逻辑站ASM-----------模拟子模件DIS-------数字指示站CTS-------- 控制I/O子模件TPL---------通信回路端子单元TDI/IDO--数字输入/输出端子单元TAI/TAO-------- 模拟输入/输出端子单元TLS-----------逻辑站端子单元TCS-------控制器站端子单元CTM------------ 组态调整单元MBD------------控制板LOG--------记录器站ENG----------工程师控制站HSR--------历史数据存储及检索站OPE-----------操作员/报警控制台CALC------------- 记算机站TV---------高压主汽阀GV-----------高压调节阀RV---------中压主汽阀IV--------- 中压调节阀PPS--汽轮机防进水保护系统AS-----------自动同步BOP---------轴承润滑油泵EOP--------- 紧急事故油泵SOB-------高压备用密封油泵CCBF-------------协调控制锅炉跟随方式CCTF------------ 协调控制汽轮机跟随方式CRT----------阴极射线管GC----------高压调节阀控制IC-------- 中压调节阀控制TC-------------高压主汽阀控制LDC---------负荷指令计算机OA------------ 操作员自动控制PCV--------压力控制阀门RD--------快速降负荷RSV------------中压主汽阀TSI-----------汽轮机监控仪表TPC----------汽轮机压力控制UPS----------不间断电源。
一、PROMOS控制系统原理1 工作原理:PROMOS系统上电后,控制器首先对急停和电话等非智能部件进行初始化查询,然后根据返回的信息,判断安全回路是否正常;对非智能部件初始化结束后,接着进行智能部件的初始化,以设置每一个I/O口的数据类型,如:开关量、模拟量、或频率量。
初始化完成以后,控制器每隔35 ms对非智能部件进行一次查询,并不断对智能部件进行令牌式查询。
智能部件通过I/O口采集的信息,首先由智能部件进行预处理,然后传给控制器,由控制器进行处理,决定是否进行某种动作,然后将指令传给智能部件,由智能部件控制执行单元来完成控制器的指令。
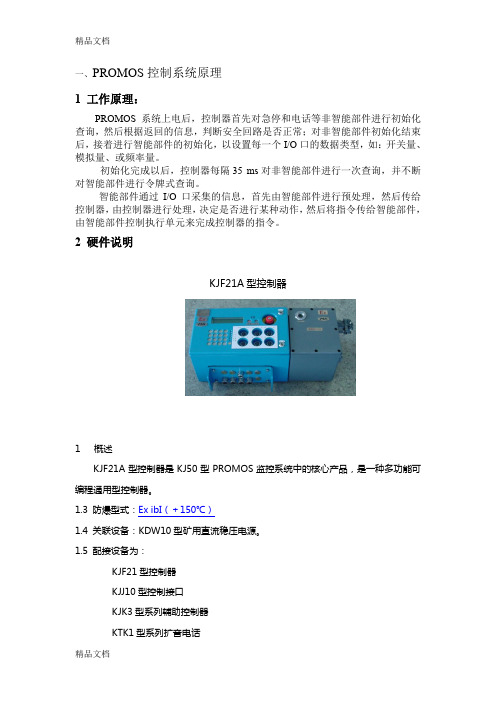
2 硬件说明KJF21A型控制器1 概述KJF21A型控制器是KJ50型PROMOS监控系统中的核心产品,是一种多功能可编程通用型控制器。
1.3 防爆型式:Ex ibI(+150℃)1.4 关联设备:KDW10型矿用直流稳压电源。
1.5 配接设备为:KJF21型控制器KJJ10型控制接口KJK3型系列辅助控制器KTK1型系列扩音电话KPG3型系列急停开关KFD1型系列线路终端KPA1型按钮KPG2型开关KZD2型电控阀等等2 组成结构与工作原理2.1 外部结构其产品外形结构见图1控制器外形图(4)磁感应开关指示灯(5)外围设备错误指示灯(6)安全回路状态指示灯(7)维修状态指示灯(8)单机状态指示灯(9)被控设备运行指示灯(10)预警按钮(15)3#单台启停旋钮(16)备用单台启停旋钮(17)1#单台启停旋钮(18)2#单台启停旋钮(19)Linie右(20)AST口(21)Linie左(22)集中控制开关(23)控制方式开关(24)磁感应开关2.2内部结构2.CMA卡4.LINIE卡15.LINIE卡2X1.AST线NF语音通信功能X2.NF语音内部通信插座X3.前面板通信总线插座X4.PS2305S电源插座X5.AST2,AST3电源插座X6.PS2300电源AMP插座X7.AST1和LINIE外部电源插座X8.LINIE1左插座X9.LINIE1右插座X10.LINIE2左插座X11.LINIE2右插座X12.AST1插座X13.AST2插座X14.AST3插座X15.20MA串口A(SIO1)插座X16.20MA串口B(SIO2)插座S2 PS2501模块和AST光缆连接开关H1-H10 发光指示灯2.2.3 串行接口:控制器有两个串行接口SIOⅠ(B)和SIOⅡ(A),按通讯方式可选择20mA,通信距离A口:1000M,B口:2000M20mA外系统设备接口2.3.2 通讯波特率的设定KDW10型矿用直流稳压电源1 概述1.1KDW10型矿用直流稳压电源(以下简称电源)是PROMOS系统中的关键产品,为PROMOS系统提供本安电源,适用于煤矿井下的有甲烷和煤尘爆炸性危险的环境中,其防爆型式为:矿用隔爆兼本安型。
企业不仅需要"所有者激励经营者',"经营者激励员工',而且需要"员工激励经营者'的新观点。
PFS采用的唯一评价标准既不是计划指标与财务报表,也不是股票价格,而是员工对经营者的认同度。
PFS能够有效解决企业"59岁现象'、"所有者管理缺位'、"经营者短期行为'等一系列问题,可与经营者年薪制、股票期权或股份期权等并存于企业当中,共同提高企业经营者的积极性。
PFS不仅能激发企业经营者的积极性,同时还能激发广大员工的积极性,而且不以降低所有者的积极性为代价,即便在所有者无法到企业进行管理的情况下,企业仍然能够实现自我激励和自我约束,从而有利于企业走上自我激励和自我约束相结合的良性循环轨道,实现长期可持续发展;有利于从制度上化解风险和矛盾;有利于企业和谐、稳定以及长期发展。
PFS设计,符合帕累托改进原则,适用于所有权与经营权适度分离的现代股份制企业,尤其是"所有者开明、经营者优秀、员工素质高、企业文化好'的大型、特大型企业。
PFS导入,是借助专业咨询公司入驻企业所做的一系列调研和培训工作,实现多数员工理解和支持的系统同态,再经过企业法人机构和员工组织机构的审议通过,建立永续性员工基金,设基金管理委员会和基金监察委员会,制定员工对经营者的奖励办法及奖励决定程序。
PFS建立后,在满足特定条件时系统将自动发生员工对经营者的激励现象。
PFS提出,预示了企业激励机制新境界的来临第三境界:员工激励经营者!在这个新境界来临的时代里,企业不仅有"所有者对经营者的激励机制'和"经营者对员工的激励机制',而且有"员工对经营者的激励机制'。
这三大类机制相互作用,一方面可共同促进企业加速成长,攀登新的台阶,实现新的跨越;另一方面可增强企业长生机能,有助于打造百年企业,实现基业常青。
电厂DCS分散控制系统中英文对照DCS-----------------------------分散控制系统BTG-----------------------------常规模拟仪表RUNBACK-------------------------自动快速减负荷RUNRP---------------------------强增负荷RUNDOWN-------------------------强减负荷FCB-----------------------------快速甩负荷MFT-----------------------------锅炉主燃料跳闸TSI-----------------------------汽轮机监测系统ETS-----------------------------汽轮机紧急跳机系统TAS-----------------------------汽轮机自启动系统AGC-----------------------------自动发电控制ADS-----------------------------调度自动化系统CCS-----------------------------单元机组协调控制系统FSSS----------------------------锅炉炉膛安全监控系统BMS-----------------------------燃烧管理系统SCS-----------------------------顺序控制系统MCC-----------------------------调节控制系统DAS-----------------------------数椐采集系统DEH-----------------------------数字电液调节系统MEH-----------------------------给水泵汽轮机数字电液调节系统BPS-----------------------------旁路控制系统DIS-----------------------------数字显示站MCS-----------------------------管理指令系统BM------------------------------锅炉主控TM------------------------------汽轮机主控DEB-----------------------------协调控制原理ULD-----------------------------机组负荷指令ABTC----------------------------CCS的主控系统MLS-----------------------------手动负荷设定器BCS-----------------------------燃烧器控制系统PLC-----------------------------可编程控制器UAM-----------------------------自动管理系统MTBF----------------------------平均故障间隔时间MTTR----------------------------平均故障修复时间SPC-----------------------------定值控制系统OPC-----------------------------超数保护控制系统ATC-----------------------------自动汽轮机控制ETS-----------------------------汽轮机危急遮断系统AST-----------------------------自动危急遮断控制IMP------------------------------调节级压力VP------------------------------阀位指令FA------------------------------全周进汽PA------------------------------部分进汽LVDT----------------------------线性位移差动转换器UMS-----------------------------机组主控顺序TMS-----------------------------机主控顺序BMS-----------------------------炉主控顺序BFPT----------------------------给水泵汽轮机PID-----------------------------比例积分微分调节器BATCHDATA-----------------------批数椐节STEPSUBOUTINE-------------------步子程序节FUNCTIONSUBOUTINE—-------------功能子程序节MONITORSUBOUTINE----------------监视子程序节MCR-----------------------------最大连续出力ASP-----------------------------自动停导阀LOB-----------------------------润滑油压低LP------------------------------调速油压低LV------------------------------真空低OS------------------------------超速PU------------------------------发送器RP------------------------------转子位置TB------------------------------轴向位移DPU-----------------------------分散控制单元MIS-----------------------------自动化管理信息系统DEL-----------------------------数据换码符DTE-----------------------------数据终端设备DCE-----------------------------数据通信设备RTU-----------------------------远程终端TXD-----------------------------发送数据RXD-----------------------------接收数据RTS-----------------------------请求发送CTS-----------------------------结束发送DSR-----------------------------数据装置准备好DTR-----------------------------数据终端准备好WORKSTATION---------------------工作站DATAHIGHWAYS--------------------数据高速公路DATANETWORK---------------------数据网络OIS-----------------------------操作员站EWS-----------------------------工程师站MMI-----------------------------人机接口DHC-----------------------------数据高速公路控制器FP------------------------------功能处理器MFC-----------------------------多功能处理器NMRR----------------------------差模抑制比CMRR----------------------------共模抑制比OIU-----------------------------操作员接口MMU-----------------------------端子安装单元CIU-----------------------------计算机接口单元COM-----------------------------控制器模件LIM-----------------------------回路接口模件LMM-----------------------------逻辑主模件BIM-----------------------------总线接口模件AMM-----------------------------模拟主模件DSM-----------------------------数字子模件DLS-----------------------------数字逻辑站ASM-----------------------------模拟子模件DIS-----------------------------数字指示站CTS-----------------------------控制I/O子模件TPL-----------------------------通信回路端子单元TDI/IDO-------------------------数字输入/输出端子单元TAI/TAO-------------------------模拟输入/输出端子单元TLS-----------------------------逻辑站端子单元TCS-----------------------------控制器站端子单元CTM-----------------------------组态调整单元MBD-----------------------------控制板LOG-----------------------------记录器站ENG-----------------------------工程师控制站HSR-----------------------------历史数据存储及检索站OPE-----------------------------操作员/报警控制台CALC----------------------------记算机站TV------------------------------高压主汽阀GV------------------------------高压调节阀RV------------------------------中压主汽阀IV------------------------------中压调节阀PPS-----------------------------汽轮机防进水保护系统AS------------------------------自动同步BOP-----------------------------轴承润滑油泵EOP-----------------------------紧急事故油泵SOB-----------------------------高压备用密封油泵CCBF----------------------------协调控制锅炉跟随方式CCTF----------------------------协调控制汽轮机跟随方式CRT-----------------------------阴极射线管GC------------------------------高压调节阀控制IC------------------------------中压调节阀控制TC------------------------------高压主汽阀控制LDC-----------------------------负荷指令计算机OA------------------------------操作员自动控制PCV-----------------------------压力控制阀门RD------------------------------快速降负荷RSV-----------------------------中压主汽阀TSI-----------------------------汽轮机监控仪表TPC-----------------------------汽轮机压力控制UPS-----------------------------不间断电源。

华为高清视讯系统技术方案建议书临时方案华为技术有限公司2016年10月9日使用说明(2016.10.9):1、模板使用时根据实际客户需求和方案设计,选择相应章节内容,与实际方案不相关的内容需删除;2、模板中使用说明、备注部分为内部参考,具体制作面向客户提交的方案时,需删除所有使用说明、备注部分。
目录1视讯技术发展及应用需求 (5)1.1技术发展 (5)1.1.1视频 (5)1.1.2音频 (5)1.1.3组网 (5)1.2应用需求 (6)1.2.1高临场感体验 (6)1.2.2低带宽高清 (6)1.2.3良好的网络适应性 (6)1.2.4良好的易用性 (6)1.2.5稳定性和可维护性 (7)1.2.6标准开放和融合互通 (7)1.2.7支持多种线路接入方式 (7)1.2.8客户化、可定制 (7)2华为高清视讯系统需求分析 (7)2.1华为背景简介 (7)2.2华为网络现状分析 (8)2.3华为客户需求分析 (8)3 华为高清视频系统设计方案建议 (8)3.1系统设计依据 (8)3.2系统设计原则 (11)3.3方案四SMC2.0+MCU96X0 ................................................................... 错误!未定义书签。
3.4系统组网方案四配置清单 ...................................................................... 错误!未定义书签。
4华为高清视频系统主要功能及特点 (12)4.1良好的高清晰音视频沟通体验 (12)4.1.1全高清108060端到端解决方案 (12)4.1.2高流畅性 (12)4.1.3强大全编全解处理能力,最大限度支持动态速率、协议适配 (13)4.1.4VME+H.264 HP 低带宽高清 (13)4.1.5H.264 SVC技术 (14)4.1.6高清1080P60FPS静态/动态双流 (14)4.1.7高保真,立体声,CD音质效果 (15)4.2丰富的会议召集模式 (15)4.2.1主叫呼集 (15)4.2.2匿名会议(电话会议模式) (16)4.2.3管理员调度 (16)4.2.4网络预约 (16)4.2.5视音频IVR导航与ad-hoc创建和加入会议 (16)4.2.6特服号入会 (16)4.2.7Outlook预约会议 (16)4.2.8云化资源池管理实现会议智能调度 (16)4.3良好的网络适应性 (18)4.3.1超强纠错(SEC 2.0-- Super Error Concealment) (18)4.3.2超强纠错(SEC 3.0-- Super Error Concealment) (18)4.3.3智能调速(IRC--Intelligent Rate Control) (19)4.3.4断线恢复(RoD--Reconnect on Disconnect) (19)4.3.5丢包重传(ARQ--Automatic Repeat reQuest) (20)4.4简单易用 (20)4.4.1用户界面简约时尚 (20)4.4.2PAD智能操控平台 (20)4.4.3丰富的会议控制功能 (20)4.4.4会议模板预置功能 (21)4.4.5字幕与横幅功能 (22)4.4.6一屏三显,节约投资 (22)4.4.7多视一流功能 (22)4.4.8无线辅流,轻松共享数据 (23)4.4.9支持WIFI呼叫及无线麦克 (23)4.4.10USB零配置 (24)4.4.11全景会场功能 (25)4.4.12多组多画面(on-table多画面) (25)4.4.13图形化操作界面 (25)4.4.14软终端随时随地接入会议 (26)4.4.153G-SDI接口实现1080P60fps远距离传输 (28)4.5安全稳定 (28)4.5.1产品成熟 (28)4.5.2系统稳定 (29)4.5.3多重加密 (30)4.5.4系统安全 (30)4.5.5资源池会议备份 (32)4.6管理维护方便 (33)4.6.1分级分权,大网维护简单 (33)4.6.2Nlog网络线路实时监控 (37)4.6.3支持WEB管理 (37)4.6.4系统设备拓扑图生成管理 (37)4.6.5系统设备配置批量升级及备份 (37)4.6.6系统告警和日志管理 (38)4.7标准互通 (39)4.7.1采用国际标准协议 (39)4.7.2支持TIP协议,与思科网真互通 (39)4.7.3华为视讯产品互联互通能力介绍 (39)4.7.4支持与微软UC系统互通 (41)4.7.5端到端IMS融合解决方案 (42)4.8丰富组网 (42)4.8.1支持多种接入方式 (42)4.8.2最大5级和超强多通道级联能力 (43)4.8.3支持大容量语音接入,满足在外人员接入视频会议需求 (43)4.8.4支持高清录制点播功能 (44)4.8.5支持软件化部署的管理平台 (48)4.8.6完善的公私网穿越解决方案 (49)4.9专业定制 .................................................................................................. 错误!未定义书签。
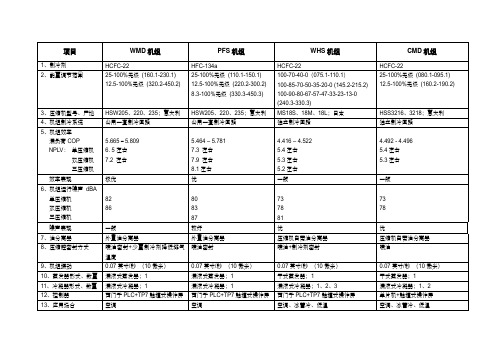
几种主流DCS系统对比分析DCS系统是工业自动化中的重要组成部分,不同的系统具有各自的性能特点。
以下是四种不同DCS系统的比较:Yokogawa DCS(CS3000):该系统具有可靠性、实时性和开放性,能够兼容非CENTUM系统部件。
此外,它还具有虚拟测试功能(FCS仿真器)。
需要注意的是,如果需要G3防腐认证,用户需要特别指出。
CENTUMCS3000R3.01:该系统具有系统配置齐全、冗余容错、点对点对等通讯方式等特点。
此外,它还具有双冗余令牌控制总线等功能,最大位号量为十万,最快扫描周期为1秒,趋势图最多可定义2560个参数。
系统保存数据最长维持72小时,操作站为通用PC,并具有安全措施。
Emerson DCS(Delta V):该系统具有系统配置灵活、可靠性高、操作和维护工作量小等特点。
此外,它还具有一体化的模块软件、虚拟测试功能和控制器及卡件全部带有G3防腐认证等特点。
INVENSYS DCS(I/A Series):该系统具有开放性、可靠性和技术先进性等特点。
它的Mesh网络具备高速、多冗余、点对点的网络通讯性能,而且有自己的DCS系统和ESD系统,系统间通讯能力强且可靠顺畅。
需要注意的是,如果需要G3防腐认证,用户需要特别指出。
Honeywell DCS(PKS C300):该系统具有可靠性、实时性和开放性等特点,全双冗余结构,容错以太网技术,强大的可组态功能,控制器及卡件可选G3防腐等级保护模件。
需要注意的是,查阅资料显示该系统带有OPC但不对外开放,如果需要使用OPC协议,用户需要额外提出要求。
综上所述,不同的DCS系统具有各自的性能特点,用户应该根据自己的需求选择最适合自己的系统。
四家系统的共同点包括:广泛应用于传统领域,具备大型系统的应用经验;系统配置齐全且具备冗余容错;具有安全措施以保证系统数据的安全可靠;可通过OPC协议和其它系统及上层管理网无缝集成;都提供24小时内紧急维护;都支持其它通讯协议。
第一章系统内容描述1火灾自动报警部分火灾自动报警部分主要由安装在整个燕都大酒店建筑内各个部位的火灾探测器及手动报警按钮、消火栓按钮等设备组成。
火灾探测器就如同火灾报警系统的“眼睛”,通过各自的火灾探测传感器采集现场的火警信号,实时传送给火灾报警控制器,火灾报警控制器进行各种智能的分析判断后发出火灾报警,并联动相应的联动设备,进行人员疏散和灭火。
手动报警按钮则作为自动报警的一个关键补充,如人为发现火情后及时按下手动报警按钮,通知主机何处发生了火情,并进行相关的联动措施。
本系统中的火灾报警部分包括智能烟感探测器、智能温感探测器、智能红外光束感烟探测器、车库非编码感温探测器、可燃气体探测器、手动报警按钮、地址式消火栓按钮等设备组成。
2.2联动控制部分联动控制部分主要是在火灾报警后,进行人员疏散和灭火的联动,保护建筑物内的人民生命财产安全。
联动控制与火灾报警相辅相成,缺一不可,有了可靠的火灾报警还需要有同样可靠的联动控制,这样才能在火灾发生时把火灾造成的损失降到最低。
联动控制部分包括消火栓系统联动、自动喷淋灭火系统、消防广播强切、切断非消防电源、防火卷帘门、电梯首次迫降、声光报警器、空调通风系统切断、防排烟系统联动、煤气阀联动、客房蜂鸣器底座联动等联动控制。
消防联动控制系统还留出与消防广播、楼宇自控、安防等弱电系统、时钟的接口等。
2.3系统配置说明本着安全可靠、技术先进、经济合理、使用方便的原则,针对燕都大酒店的消防报警系统的技术要求,详细配置如下:1)本工程采用的诺帝菲尔系统由消防报警控制器NFS3030、监控图文电脑计算机、消防广播通信系统、感烟感温探测器、联动模块、楼层显示器等组成,系统构成示意图如下图:火灾报警及联动构成示意图图2)本工程依据招标设备量和平面图,得出如下设备量:序号型号名称数量1 FSP-851 智能烟感探测器21142 FST-851 智能温感探测器1373 B501 智能探测器底座17644 B501BH 智能蜂鸣器底座4895 M500K 手动报警按钮带插孔2066 J-XAP-M-M500H 消火拴按钮3057 FMM-1 输入模块5388 FCM-1 输出模块540依据以上的外部设备数量,计算出总的智能探测器点数为2257,模块总点数为1589。


闭环式电控空气悬架电控单元标定系统研究作者:顾士洲严天一滕利卫来源:《青岛大学学报(工程技术版)》2022年第01期文章编号: 10069798(2022)01003008; DOI: 10.13306/j.10069798.2022.01.005摘要:为使闭环式电控空气悬架系统匹配不同车型,本文主要对闭环式电控空气悬架系统电控单元标定系统进行研究。
分析了闭环式电控空气悬架系统电控单元总体结构,开发了基于飞思卡尔MC9S12XDT512主控芯片的闭环式电控空气悬架系统电控单元,并利用CodeWarrior集成开发环境,编写了电控单元各模塊驱动程序。
同时,根据闭环式电控空气悬架系统电控单元功能需求,并基于CAN通信,开发了其电控单元标定系统。
为验证本文开发的闭环式电控空气悬架系统电控单元标定系统的实车应用可行性,利用具有闭环式电控空气悬架系统的试验改装车辆,开展相关实车静态和道路试验。
试验结果表明,当车辆分别处于空载、空载+100 kg和空载+200 kg状态时,高、中、低位手动调节下的前后悬稳态,实际高度与标定高度误差绝对值保持在3 mm以内,满足设计需求;当车辆车速分别为15,30,45,60,75,90 km/h时,高、中、低位自动调节下的前后悬高度平均值与标定的前后悬高度误差绝对值,始终控制在5 mm以内,满足实车应用需求。
该研究对工程实际中闭环式电控空气悬架系统电控单元标定系统的设计开发具有一定参考意义。
关键词:闭环式电控空气悬架系统; 电控单元; 标定系统; 实车试验中图分类号: U463.33文献标识码: A传统的开环式电控空气悬架系统的充放气回路具有封闭性特点,当空气弹簧充气时,气体介质由存有压缩气体的储气筒提供;放气时,从空气弹簧放出的气体再泵回储气筒,实现了气体介质的循环利用。
而闭环式电控空气悬架系统是一种新型电控空气悬架系统,其基本功能是通过电控单元适时地控制空气弹簧充放气动作,合理调节车身高度,改变悬架刚度和阻尼,以适应不同车速和路况,使车辆保持良好平顺性、燃油经济性及通过性等[14]。
国产maxDNA大型分散控制系统在600MW超临界机组脱硫FCS中的应用吴科;刘舟【期刊名称】《工业控制计算机》【年(卷),期】2015(028)010【摘要】Based on the physical features and control requirements for the 600MW supercritical unit FGD FCS,the IP-owned domestic maxDNA large-scale distributed control system was successful y applied for via right hardware configura-tion and control algorithm design.This system is proved to have high stability and good performance and able to meet re-quirements of FCS and could be used widely.%针对某电厂600MW超临界机组脱硫FCS的特点和控制要求,采用具有知识产权的国产maxDNA大型分散控制系统,通过合理的硬件配置和控制算法软件设计,实现系统的成功应用.应用结果表明,该系统满足控制要求,且稳定可靠,性能优异,可推广应用.【总页数】3页(P4-5,8)【作者】吴科;刘舟【作者单位】南京国电南自美卓控制系统有限公司,江苏南京 210032;南京国电南自美卓控制系统有限公司,江苏南京 210032【正文语种】中文【相关文献】1.国产 maxDNA 大型分散控制系统在1000 MW 机组一体化控制中的应用 [J], 吴科;马振华;朱能飞;陈玉年2.maxDNA分散控制系统在电厂DCS系统改造中的应用 [J], 闫红霞3.maxDNA分散控制系统在电厂DCS系统改造中的应用 [J], 闫红霞4.maxDNA分散控制系统在电厂DCS系统改造中的应用 [J], 闫红霞5.maxDNA大型分散控制系统在1000MW超超临界机组DEH和ETS中的应用[J], 陈玉年;纪政;朱能飞;吴科因版权原因,仅展示原文概要,查看原文内容请购买。

美国生物战评估系统(BCDS)中预研技术演示系统(ATD)
的进展
王珊珊
【期刊名称】《国外防化科技动态》
【年(卷),期】2004(000)008
【摘要】日前,美国防护威胁降低局(DTRA)已经完成了生物战评估系统(BCDS)的预研技术演示阶段(ATD)任务,整个评估系统预计从2004年6月开始,到2O09年完成。
而业已完成的ATD系统能够全面展示小型无人飞行器(UAVS)以及相关传感器对DTRA研发的反大规模杀伤性武器评估(WMD)系统的支持。
【总页数】2页(P2-3)
【作者】王珊珊
【作者单位】无
【正文语种】中文
【中图分类】E931
【相关文献】
1.美国国防预研计划局支付得起的树脂基复合材料计划进展述评 [J], 张和善
2.美国进一步发展生物战探测技术拟研制通用探测系统 [J],
3.美国研发生物战评估系统 [J], 姜蔚
4.美国应用生物芯片技术开发新型生物战剂检测传感器 [J], 张新民;张传本
5.促进航空预研成果转化调整预研经费比例强化先期技术演示验证 [J], 吕佩
因版权原因,仅展示原文概要,查看原文内容请购买。