CN_5 lenze9400自由应用_V20
- 格式:ppt
- 大小:1.17 MB
- 文档页数:19



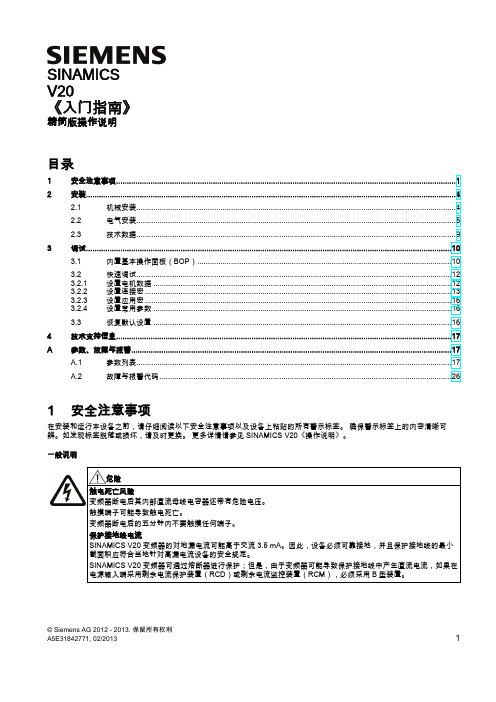
思科公开信息思科 Catalyst 9400 管理引擎模块目录产品概述 (3)详细信息 (4)特性 (5)平台优势 (12)许可 (16)规格 (19)保修 (23)订购 (24)Cisco Capital (25)文档历史记录 (26)产品概述思科 Catalyst® 9400 系列是思科专为安全性、物联网 (IoT) 和多云环境打造的主打模块化企业交换接入和汇聚平台。
该系列交换机是思科领先的企业架构思科® SD-Access 的基本组件。
该平台采用最高支持 9 Tbps 系统带宽的机箱架构,并具备符合高密度 IEEE 802.3bt 标准的业界领先功率输出(60W 和 90W PoE),可为您提供强大的投资保护。
现在,整个产品组合都具有提供冗余的能力。
依靠无中断转发和状态切换 (NSF/SSO)、服务中软件升级 (ISSU)、上行链路恢复能力、电源 N+1/N+N 冗余以及思科 StackWise®虚拟 (SVL)(带 ISSU)等功能,思科 Catalyst 9400 系列交换机可实现一流的高可用性。
该平台面向企业进行了优化,采用了创新的双向维护风扇托架和侧向气流设计,非常适合对深度约为 16 英寸的配线柜进行部署。
单个系统可扩展至最多 384 个接入端口,并可选择 1 千兆以太网铜缆、1 千兆以太网光纤、思科 UPOE +©、思科通用型以太网供电(思科 UPOE®)和增强型以太网供电 (PoE+) 等多种端口类型;也可扩展至最多 192 个端口,并可选择 10G 光纤和多千兆等多种端口类型。
该平台还支持高级路由和基础设施服务、SD-Access 功能,以及网络系统虚拟化。
借助这些功能,您可以将该平台部署到中小型园区环境的核心层和汇聚层中。
软件定义架构的基础要应对高级持续性安全威胁、物联网 (IoT) 设备的指数级增长、无处不在的移动性和云的采用等等趋势,必须采用一种集高级硬件和软件创新于一身的网络交换矩阵,在保护和简化客户网络的同时,使客户网络实现自动化。
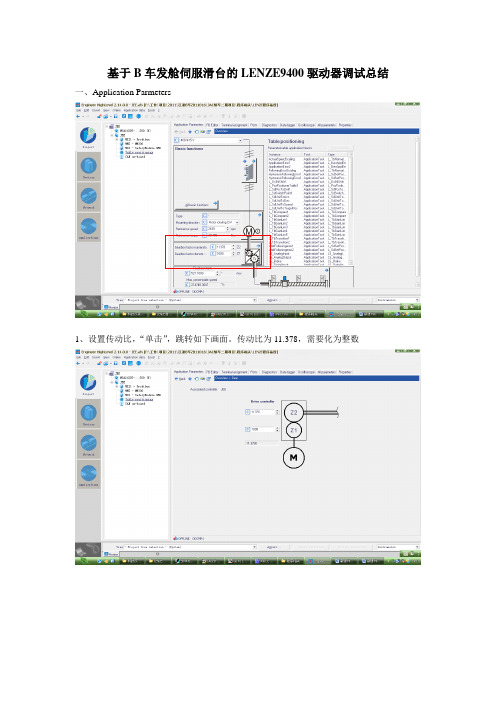
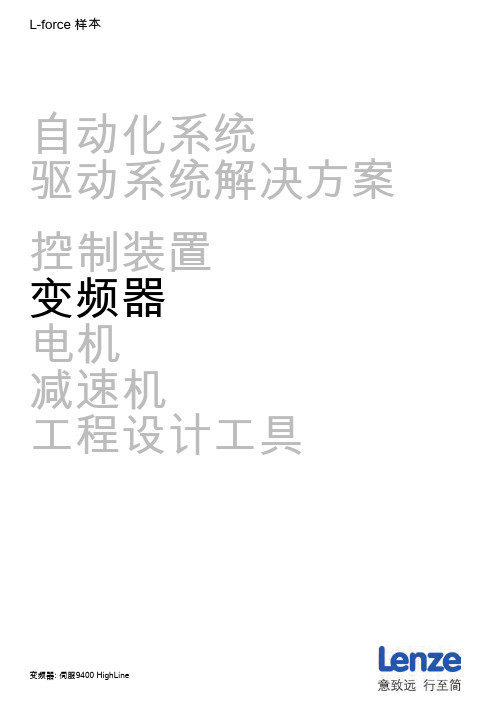
基于B车发舱伺服滑台的LENZE9400驱动器调试总结一、Application Parmeters1、设置传动比,“单击”,跳转如下画面。
传动比为11.378,需要化为整数2、设置电机基本参数,“单击”跳转如下画面1)、根据电机类型,选择电机类型。
此处选择伺服异步电机 2)、“单击”,设置电机参数,画面如下:123选择“From Driver ”,会自动获取电机基本参数 3) 、设置外围编码器的参数.“单击”,画面如下3.1)、编码器类型:此处选X8(绝对值编码器) 3.2)也选择绝对值编码213、根据齿轮大小,传动比。
设置相关参数。
“单击”,画面跳转如下1)、Feed constant: 传动轮转动一圈所走得距离。
本项目为527.1mm;根据齿轮数和齿间距可得出该值。
2)、Reference velocity: 计算所得的线速度。
可以设计的极限速度比较。
二者应该一样。
3)、Unit:选择单位mm4)、Motor reference speed :电机额定转速。
二、FB editor1 2 31、输入(控制字1W,定位模式速度值1W,速度模式速度值1W,目标位2W,定位模式加速度1W)以及一些常量1)、控制字。
PLC将控制字以整字的形式发给驱动器是,发的值是一一对应的,如发L#08,驱动器收到的就是L#08。
但是如果PLC将控制字以位的形式发给驱动器,则需要注意将高8位和低8位相反。
例如控制字PLC地址为QW40,则Q40.0对应驱动器bBit8,Q40.7对应bBit15;而Q41.0对应bBit0,Q41.7对应bBit7。
bBit0:SwitchOn 驱动器没有反馈Ready信号,则需要一直发此信号。
bBit1:预留bBit2:QSP 快停。
PLC发此信号,电机快速停止bBit3:速度模式正转bBit4:速度模式反转bBit5:预留bBit6:预留bBit7:故障复位(故障清楚)bBit8:预留 bBit9:预留 bBit10:预留bBit11:定位模式使能 ,走定位模式,必须发信号bBit12:定位模式启动 ,启动定位模式,在bBit11为真的前提下,电机开始运动。
L-force样本自动化系统驱动系统解决方案控制装置变频器电机减速机工程设计工具变频器:伺服9400HighLineL-force样本的内容Lenze,让许多事物变得简单。
关于Lenze我们的原则:用最合适的产品应对实际应用L-force产品系列1.1基于控制器的自动化自动化系统1.2基于驱动器的自动化2.1HighLine任务驱动系统解决方案2.2StateLine任务2.3BaseLine任务3.1控制器3200C柜式控制器控制装置3.2控制器c3003.3控制器p500面板控制器3.4控制器p3003.5I/O1000'3.6监控面板4.1变频器8400protec分布式变频器4.2变频器8400motec4.4柜式伺服9400HighLine4.5伺服8400TopLine4.6伺服驱动器i7004.7变频器8400HighLine4.8变频器8400StateLine4.10变频器8400BaseLine5.1同步伺服电机MCS伺服电机电机5.2MD☐KS同步伺服电机5.3异步伺服电机MQA5.4异步伺服电机MCA5.5三相交流电机MF三相交流电机5.6三相交流电机MH5.7三相交流电机MD5.8Lenze Smart电机m3005.9基础型MD/MH三相交流电机6.1g700-P行星轮减速机轴向减速机减速机6.2MPR/MPG行星轮减速机6.3g500-H斜齿轮减速机6.4GST斜齿轮减速机6.5g500-S小侧隙斜齿轮减速机6.6GFL小侧隙斜齿轮减速机6.7g500-B伞齿轮减速机直角减速机6.8GKR伞齿轮减速机6.9GKS螺旋伞齿轮减速机6.10GSS圆柱斜齿轮蜗轮蜗杆减速机6.11分配如上电机数据7.1Navigator工程设计工具7.2Drive Solution Designer7.3Drive Solution Catalogue7.4Engineer7.5PLC Designer7.6VisiWinNET®7.7EASY Starter精选组合附加组合Lenze,让许多事物变得简单。
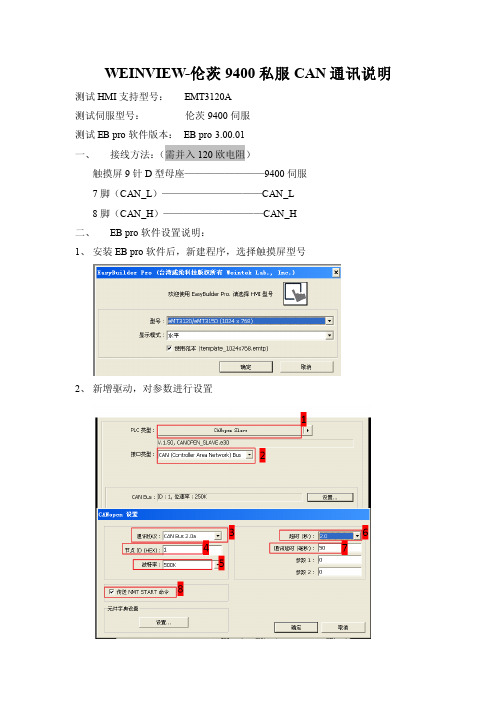
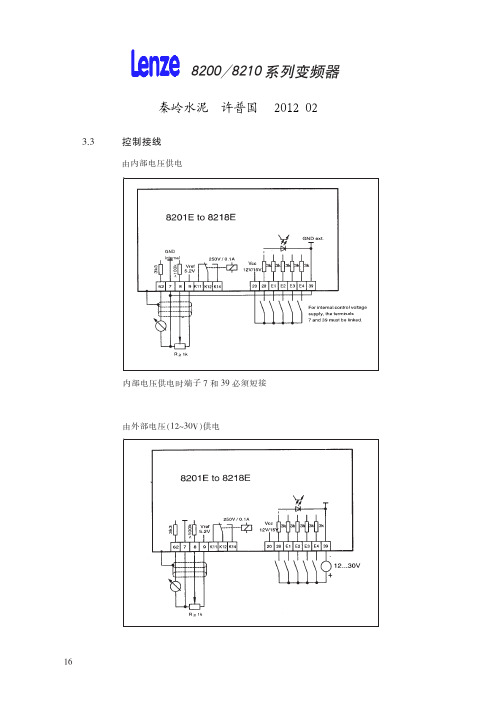
WEINVIEW-伦茨9400私服CAN通讯说明测试HMI支持型号:EMT3120A测试伺服型号:伦茨9400伺服测试EB pro软件版本:EB pro 3.00.01一、接线方法:(需并入120欧电阻)触摸屏9针D型母座————————9400伺服7脚(CAN_L)——————————CAN_L8脚(CAN_H)——————————CAN_H二、EB pro软件设置说明:1、安装EB pro软件后,新建程序,选择触摸屏型号2、新增驱动,对参数进行设置①PLC类型、选择CANopen Slave②接口类型:选择默认CAN Bus③通讯协议:针对9400伺服选择CAN Bus 2.0a④节点ID:即伺服的节点站号(节点ID)⑤波特率:即匹配伺服的波特率⑥超时:设置触摸屏判断通讯超时的时间,正常设置1-3S⑦通讯延时:根据客户设备通道反应时间判定(一般SDO),9400伺服参数通道需要20-50ms反应时间,如果过短伺服会返回错误代码(实际设定设定时考虑物理传送和处理时间,可设置更短的延时)。
⑧传送NMT START命令:部分设备需要启动命令时勾选设置。
3、元件字典设置①TxPDO映射:TxPDO目前采用RxPDO代替,即TxPDO无需设置。
②RxPDO映射:过程通道进行PDO映射地方,RxPDO和TxPDO均在此映射。
③SDO功能码:参数通道功能码设置,比如参数通道COB-ID为601H,节点ID为01H,此时SDO功能码设置600H(COB-ID去掉节点ID)④导入EDS档案:由于EB pro软件中TxPDO映射采用RxPDO方式映射,标准EDS档案导入会存在问题,如果需要导入,需将EDS档案中的TxPDO映射部分映射到RxPDO中即可。
备注:系统会默认4个TxPDO和4个RxPDO,可根据使用情况随意增减。
4、参数通道(SDO)设置:举例对9400伺服11号参数和位置长度读写。
如果对11号参数读写,用“数值输入元件”设置如下:节点ID和功能码已在以上步骤中设置好。
![伦茨9400中文使用手册[1]](https://img.taocdn.com/s1/m/8c12d857581b6bd97e19ea52.png)


u高分辨率、720p 高清 PTZ 摄像机具有高性能的 30 倍变焦镜头,适用于在照明度极低的场景中拍摄精细的细节u Intelligent Tracking(智能跟踪)和报警规则引擎采用板载智能视频分析 (IVA)u使用双重录像选项(iSCSI 和 SD 卡)以及双电源选项(高功率以太网供电(高功率 PoE)/24 VAC),增强系统灵活性u完全可配置的四码流,且视频流可单独配置,基于博世通用产品平台 (CPP4)u安装极为轻松直观,具备多个预配置的用户模式,允许用户选择适合其应用场合的摄像机配置AUTODOME IP starlight 7000 HD 是一款易于安装的高速PTZ 球型摄像机,它采用经过现场验证的室内/室外吊装防护罩或室内嵌入天花板式防护罩,配备优质的高清 (HD)720p50/60 视频和 30 倍光学变焦,无论在白天还是黑夜都可以提供出色的画面质量和网络性能。
该摄像机使您可以通过网络完全控制球型摄像机的所有功能,包括遥摄/俯仰/变焦操作、预置位、巡视路线和报警,并可通过 Web 配置球型摄像机的所有设置。
此外,它还提供直接网络视频流,并且采用 H.264 压缩/带宽限制技术,不但能高效地管理带宽和存储要求,同时还能提供出色的图像品质。
功能采用starlight技术的高性能PTZ摄像机相当出色的低光照灵敏度使此摄像机在所有光线条件下均表现出色。
光线不足时,此摄像机可以移开红外滤镜以自动从彩色切换至黑白模式,从而增强灵敏度,同时保持高超的图像品质。
在昏暗的环境中工作时,自动控制快门速度将会使灵敏度提高 50 倍以上。
Starlight 型号具有 720p50/60 高清成像平台,并采用starlight 技术。
此摄像机可在环境光线不足的场景中生成清晰的视频图像,而不会出现与使用慢速快门的摄像机相关的任何运动模糊。
此摄像机经过调试,在白天和黑夜工作时,均可提供高品质的高清视频。
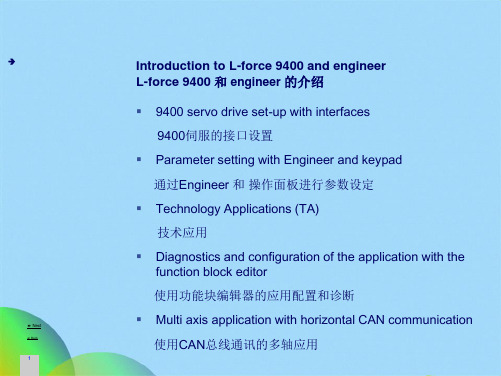


伦茨9400伺服使用手册Welcome Practical introduction: 实用简介 L-force 9400 Servo DrivesL-force Engineer19 January 2007 Trainer: Torsten He Markus Toeberg Markus Warnecke StefanWitte 9400 Servo Drives Target Introduction to L-force 9400 and engineer First withoutengineer L-force 9400 和 engineer 的介绍 Engineer with single drive basics of TA 9400 servo drive set-up with interfaces Structured project further TA 9400伺服的接口设置 FB editor Parameter setting with Engineer and keypad Multi axis applications Onlinealternatives 通过Engineer 和操作面板进行参数设定 Technology Applications TA 技术应用 Diagnostics and configuration of the application with the function block editor使用功能块编辑器的应用配置和诊断 Next Back Multi axis application with horizontal CAN communication 2 使用CAN总线通讯的多轴应用 9400 Servo DrivesModular set-up ? 11 kW Target First without engineer Engineer with single drive basicsof TA Mounting base Structured project 安装底板 further TA FB editor Power module Multi axis applications 功率模块 Online alternatives Extension module 扩展模块Accessories Next Back 附件 3 9400 Servo Drives Interfaces at the power module Target First without engineer Engineer with single drive basics of TA CAN on board 内置CAN Structured project further TA 24 V supply and FB editor state bus 24V和状态总线 Multi axis applications Online alternatives Analog / digital IOs 2 module receptacles模拟/数字 I/O for extensions 2个扩展模块插槽 LEDs 指示灯 Diagnostic interfaceModule receptacle for 诊断接口 memory module 存储模块插槽 Resolver input 旋转变压器接口 Module receptacle for Next Multi encoder input safety technology Back 编码器接口安全模块插槽 HighLine StateLine: 1 个扩展插槽 4 9400 Servo DrivesLEDs Target First without engineer 指示灯 Engineer with single drive basics of TA CAN RUN CAN ERROR CAN 运行 Structured project CAN 错误further TA OFFCAN inactive CAN没激活 FB editor Bus warning Pre-operational 总线报警预操作 Multi axis applications Bus off Operational 总线关闭操作 Online alternativesDRIVE READY DRIVE ERROR 驱动器投入驱动器错误 OFF Pulse inhibit OFF OK due to an error 由于错误而禁止 Error status Controller inhibited 错误状态控制器禁止 System error Controller enabled 系统错误控制器使能 USER ready 24V 用户定义 Next Applicable in the application Back 在应用中使用 5 9400 ServoDrives Keypad Target First without engineer 面板 Engineer with single drive basics of TA 4 direction keys for navigation Structured project 4个方向键用于导航 further TA 2context-sensitive function keys FB editor 2个功能键 Multi axis applications Run and stop keys configurable Online alternatives 运行和停止键(可配置) Status field 状态区 Notes: 注: Diagnostic amp parameter setting only ready 仅用于诊断和参数设定Next Application is stored in the memory module Back 应用存储在存储模块中 6 9400Servo Drives Your training set-up… Target First without engineer 你的培训设置…Engineer with single drive basics of TA 2x 9400 HighLine Single Drive type 1(2个9400HighLine Structured project 单驱动型1) further TA – Extension module Ethernet (扩展模块-以太网) FB editor – Memory module MM330 (存储模块-MM330)Multiaxis applications – Safety module SM0 (安全模块-SM0) Online alternatives –Firmware version 01.51.01 (固件版本01.51.01) 2x Motor MCS06C41 with resolverand tooth wheel(2个伺服电机带旋变和齿型轮) – left Z 72 and 32 (左Z72,32)– right Z 60 and 20 (右Z60,20) Belt 皮带– left L 600 mm Z 120(左L600mm;Z120) Next – right L 535 mm Z 107 (右L535mm;Z107) Back Active application:“Actuator –speed“ (激活应用 Actuator 7 – speed) 9400 ServoDrives Exercise 1:Detect the drive status Target First without engineer by means of LEDs and keypad 通过指示灯和面板检测驱动器状态 Engineer with single drive basics of TA 1. Switch on the supply voltages 24 V and 400 V Structured project 电源上电further TA FB editor 2.Make the left drive rotate:运转左侧驱动器 Multi axis applicationsRFR Controllerenable Reglerfreigabe控制器使能 Online alternatives DI1 Deactivation of quick stop 快停取消 DI2 Start 启动 AI1 Speed setpoint 速度设定 3. Switch off the 400 Vsupply voltage 切断400V电源 4. Find out the drive status by means of the LEDs and the keypad 通过指示灯和面板观察状态 5. Make the logbook being displayed at the keypad Next 对面板显示进行记录 Back 8 9400 Servo Drives Start assistant 启动助手Target First without engineer Engineer with single drive basics of TA Structured projectfurther TA FB editor Multi axis applications Online alternatives Next Back 9 9400 Servo Drives User interface 用户界面 Target First without engineer Engineer with single drive basics of TA Work space Structured project 工作区 further TA Menu bar 菜单栏FB editor Tool bar Multi axis applications 工具栏 Onlinealternatives View bar 浏览栏Project tree 工程树 ready Next Back Messages and monitor panel 信息和监视盘 109400 Servo Drives Target First without engineer Going online 在线连接 Engineer withsingle drive basics of TA Diagnostic adapter 诊断适配器 Structured project further TACAN FB editor Ethernet TCP/IP 以太网 Multi axis applications Online alternatives Point-to-point- connection 点对点连接 ready Next 10-pole special cable Back RJ69 10芯RJ69电缆 11 9400 Servo Drives How to go online 如何连接 Target First withoutengineer Engineer with single drive basics of TA 1. Select the channel of communication 选择通讯通道 Structured project further TA FBeditor Multi axis applications 2. Start the search for devices 搜索驱动器 Online alternatives 3. Confirm the detected device 确认检测到的设备 4. Connect 连接 ready Next Back 12 9400 Servo Drives Colour represents online 在线的颜色表示 Target First without engineer Engineer with single drive basics of TA Value in the Structured project work space:工作区的颜色 further TAyellow modifiable FB editor Multi axis applications 黄可修改 Online alternativesgrey yellow read only 土黄只读 red communication error 红通讯错误NextBack 13 9400 Servo Drives Exercise 2: Detect the drive status Target First without engineer by means of the engineer 通过engineer检测驱动器状态 Engineer with singledrive basics of TA 1. Start the L-force Engineer. 启动 Structured project further TA 2.Create a new project by going online via diagnostic adapters and uploading the data fromthe right drive FB editor controller. Name the project “P ractical intro“. 创建一个新工Multi axis applications 程,并通过诊断电缆从右侧的驱动器上载数据,命名为”Practical Online alternatives intro” 3. Open the project tree. Click on the drive controller. Evaluate the drive status by means of the tab “Diagnostics”. 打开工程树,点击控制器,通过“Diagnostics”栏监控驱动器状态 4. Adapt the monitor window: Showthe “Device utilisation Ixt” as a log with a suitable resolution.观察设备利用率“Deviceutilisation Ixt”是否合适 Next 5. Save your project. 保存工程 Back 14 9400 ServoDrives Solution: Detect the drive status检测驱动器状态 Target First without engineerEngineer with single drive basics of TA Structured project further TA FB editor Multi axis applications Online alternatives Next Back 15 9400 Servo Drives Applications Target 应用 First without engineer Engineer with single drive basics of TA Application configured function of one device Structured project further TA 应用单个驱动器配置的功能 FB editor Multi axis applications How can applications be created如何建立应用, Online alternatives Two possible solutions:两个可能的方法: 1. Modify or extenda prefabricated technology application supplied by Lenze 修改和扩展伦茨预先提供的技术应用 2. Create the application completely by yourself insert “No Application” or just don’t insert any application. The empty application can be edited then within the function block editor 完全由用户自己创建(插入“No Application” 或不插入任何ready Next 应用,可以用功能块编辑器在空应用上编辑) Back 16 9400 Servo DrivesApplications supplied by Lenze…伦茨提供的应 Target First without engineer 用Engineer with single drive basics of TA are called technology applications e. g.我们称作“TA”,如: Structured project further TA – Actua.。