机械毕业设计英文外文翻译468四轮转向汽车的转向特性及控制技术
- 格式:docx
- 大小:45.32 KB
- 文档页数:11

Automobile Transmissions and Power Steering Automobiles, trucks, buses, and tractors all depend on transmissions to deliver power from the engine to the wheels, The gasoline and diesel engines that power these vehicles cannot be connected directly to the wheels, because the engines must keep turning at a certain seed to keepfrom stalling. Also, different amount of torque (turning force) must be delivered to the wheels atdifferent times. A large amount of force is needed to get a car moving from a standstill. Less force is needed to keep the car moving once it is rolling. Going up a hill of driving at high speed requires still other amount of force. It is the job of the transmission to deliver the particularamount of force that is needed. The transmission also allows a motor vehicle to back up-----gasoline and diesel engines can run in only one direction, but the transmission can reverse thedirection of the force. And when a car stops, the transmission lets the engine keep running without moving the wheels.The heart of any transmission——even an automatic one—is a set of gears. Gears do notchange the power of an engine, but they can increase the torque by decreasing the speed. They canalso increase the speed by decreasing the torque.The automobile transmission uses a series of gears which enables the engine to continue tovehicle’’s speed is altered. Setting an automobile in operate at maximum efficiency when the vehiclevehicle’’s weight. This motion requires a large amount of power to overcome the inertia of the vehicleprocess requires high engine speed, needed for high power, and a gradual increase in a vehicle’sspeed to avoid a jerky start. To do this, a low gear ratio is allows the crankshaft to revolve several times in order to turn the real axle once. The low gear ratio is used for starting, climbing steep slops, and other situations in which maximum power is required .As power needs are reduced, a second, higher gear ratio is used which rotates the rear axle with fewer revolutions of the crankshaft. As the car’s speed increases, successively higher gear ratios are used until the drive from the engine to the rear wheels passes through the transmission without reduction. Two principle types of transmission are used, manual and automatic.The manual transmission system permits the driver to select the desired gear ratio bymanipulating a shift lever. Besides the forward speed gears, additional gearing is incorporated topermit the vehicle to operate in reverse. Manually operated passenger car transmission used in the United States and Canada usually have there speeds forward and one in reverse. Trucks, tractors, buses, and other heavy-duty vehicles have as many as 10 forward speeds and 2 in reverse. These units are basically five-speed transmissions with a two-speed auxiliary gearbox. Transmission that are to be shifted with the vehicle in motion incorporate synchromesh units to prevent gears from clashing as they are meshed. The synchromesh unit synchronizes the speed of the gears so that they revolve at the same speed as they slide into engagement.The automatic transmission system changes gear ratios automatically in response to changesin engine speed or throttle setting. The use of automatic transmissions increased tremendouslyafter World War Ⅱ, and they are installed in more than half of the automobile produced in the United States. Automobiles equipped with an automatic transmission have a control lever which allows the driver to select neutral, low, drive, and reverse. The engine is started in neutral, and the lever is moved to “drivedrive”” position the drive”” for normal operation when moving forward. In “drivevehicles can accelerate from rest to maximum speed by simply depressing the accelerator. Thelow”” position prevent the transmission from shifting out of the lower gear ratios.“lowIt is used for climbing steep grades, in mud, or at other tomes when maximum power ispark”” position, which locks the transmission to prevent a parked car needed. Some units have a “parkfrom rolling. The automatic transmission makes it easier to drive a car, but it is less efficient than a manually shifted unit and increase gasoline consumption. For this reason, the automatic transmission is not as common in Europe, where economy of operation is a prime sales factor.Four basic types of automatic transmissions have been developed to the point where they have been installed in production vehicles. The first consists of a standard mechanical transmission and clutch which is automatically shifted by pneumatic, hydraulic or electric power units. The second type uses a hydraulic torque converter plus a planetary gear system to increase engine torque. The third system combines a hydraulic coupling with an automatically shifted mechanical gearbox to provide torque amplification. The fourth type uses one or more stages of hydraulic torque conversion to provide torque multiplication.Automatic transmission shift in response to signals from speed sensing and throttle position sensors. The units incorporating hydraulic torque converters use the hydraulic fluid, under pressure, to engage and disengage planetary gear trains.Power steering system 也是汽车重要的一部分,The car of today is larger and heavier than earlier cars; the tyres are wider, further apart and inflated to lower pressures .In addition, the trend of development has been to place more than half the weight on the front wheels, especially the weight of the engine , which itself is larger and heavier than in the early days.To make cars easier to steer, the gear ratio in the steering box at the end of the steering column was changed to that turning the wheel required less torque, but this increased the number of turns of the steering wheel required on modern cars without power steering compared to 2.5 or 3 turns for cars built before 1940. Modern cars with power steering only require about three turns.Power assisted steering was first developed in the 1920s; one of the first devices was developed by an engineer at Pierce Arrow, an American make of luxury cars. The Cadillac division of General Motors was going to offer power steering as optional equipment on some models in the early 1930s, but the depression interfered with development. During World War Ⅱ power steering was fitted to military vehicles; in 1952 Chrysler began offering it , and it is now standard equipment on many of the biggest American cars .Electric devices were tried , but power steering today is always hydraulic , with oil pressure of perhaps 1000 psi (70kg/cm2) maintained by a pump driven by the engineer of the car . The system is a servomechanism, or servo loop, which makes a correction to compensate for the torque applied to the steering wheel by the driver. It consists of an actuator and a control valve. The actuator is a hydraulic cylinder with a piston, or ram, which is free to travel in either direction from the center. The function of the control valve is to respond to the torque from the steering wheel by actuating smaller valves at each end of the cylinder. The system is designed to assist the steering linkage, rather than to replace it, and it does not do all of the work of steering , but leaves some of it for the driver. Thus if the hydraulics fail the car can still be steered , though with greater effort, and at all times the feel of the road is mechanically transmitted from the front wheels to the hands of the hands of the driver on the steering wheel, an essential element of safe driving. The power steering makes a positive contribution to safe driving in that if the driver hits a small obstacle in the road or has a flat tyre at speed, the power unit makes it easier to keep the car under control. Many large cars fitted with wide, stiff radial ply tyres would be nearly impossible to steerat parking speeds without power steering.Hydrostatic systems, designed for off-the-road vehicles, are exception to some of this, because they dispense with the steering column and the steering box , and the steering wheel and the steered wheels are connected only by hydraulic tubes or hoses.The power steering system includes a reservoir to hold the oil. Oil pressure is always provided when the engine is running, but when the system is at rest, that is when the steering wheel is not being turned, equal pressure is available to each side of the piston in the actuator, so that it does not move.There are basically two types of power steering system: those which have the control valve located within the steering box, in which case it is usually a rotary valve, and those in which the valve is integral with actuator, when it is an axial spool valve.汽车传动系与动力转向装置轿车、卡车、公交车以及拖拉机都靠汽车传动系将动力从发动机输送到车轮上。
1 IntroductionThe key task for the automobile industry and its suppliers in future lies in speedily developing and implementing ecologically sound and economically justifiable mobility systems. Light metals such as aluminum and magnesium along with glass and carbon fiber reinforced materials, ceramics and composites have opened up the potential for considerable weight reduction and for "green" vehicle concepts which can be realized economically. Aluminum in particular can provide the impetus for new designs for the next millennium. Decades ago, the use of aluminum in auto construction was seen as an "experiment"; Today it is a vital factor in reducing weight and thus lowering fuel consumption.The average passenger car today contains 60 to 70 kg of aluminum, and current developments point to a doubling of this amount in the next few years. Motor vehicles both now and in future must meet requirements for: greater performance, greater safety, comfort, low pollution. Lightweight construction is not just about reducing weight; it is a question of -striking the right balance between reduced weight and structural efficiency. In vehicle construction this normally means making the best use of the generally very tight space available for individual components so as to allow weight to be minimized while still meeting all stiffness, strength, natural frequency or acoustical requirements. To achieve this, stresses must be distributed throughout the structure as evenly as possible. Modern numerical analysis methods such as FEA allow a very detailed analysis of system behavior, provide cost-efficient support for the complex process of optimization and thus make a huge contribution to advances in lightweight construction. Packaging, safety considerations, reproducibility and price place restrictions on the degree of weight reduction achievable.The broad range of expertise available to Krupp Presta AG allows the company to analyze customer specifications for steering systems and provide appropriate solutions.2 Requirements to be met by steering systemsThe steering is an important part of the feel of a car. The steering system should make driving an enjoyable experience with no unpleasant vibration from the road surface while guaranteeing the required hand- sing. It is also important that high safety requirements be met, both under normal conditions and in crash situations. The key criteria for the steering system are thus as follows:rolling friction, torsional stiffness /strength, Damping, temperature, corrosion, durability / fatigue, weight. Crash kinematics and energy absorption steering column requirements:natural frequency / stiffness, mass, damping, space, strength (crash, misuse), ergonomics, handling, acoustics, crash kinematics and energy absorption. Other basic conditions:interfaces with adjacent components, installation, joining techniques, price.3 Materialsmaterial light weighting can be achieved by using either stronger or lighter material. When stiffness or natural frequency are Important sizing criteria, low density materials with a high modulus of elasticity by quired. Non-exotic materials must be selected which are readily recyclable, low in price and display good durability.Further requirements are set by the manufacturing and joining processes. Steel, aluminum, magnesium and a variety of plastics are the materials of choice for steering systems.Low specific gravity, high corrosion resistance, low fabricating costs, high energy absorption and good recycle ability make aluminum a favored light weighting material. Owing to its high energy content, up to 90% of the aluminum used in auto construction can be recycled (intelligent design / no mixing with other materials). The favorable energy balance of aluminum puts it at a great advantage over many other materials.In environmental terms aluminum scores highly. The large amounts of primary energy required to make raw aluminum are offset over the lifetime of the vehicle. Composites could also become a very attractive proposition on account of their extreme stiffness, low weight and energy absorption capabilities. At present, howler, price is a problem, as are joining and quality assurance.4 Reducing component weightA focused strategy to reduce component weight requires a lightweight approach to design (force distribution, stresses), material (material selection), specifications (modified, realistic specifications)Key factors in lightweight design include [1]: force flows, material properties, ambient conditions ® safety requirements, reliability of joints, manufacture ability. Practical experience has shown that car makers' specifications based on steel need to be revised for lightweighting. Requirements valid for a steel steering shaft, for example, can result in severe oversizing of an aluminum shaft. Reducing component weight requires material compatible designs combined with material- compatible specifications.5 Lightweight componentsAs part of its development program Krupp Presta is replacing conventional steel steering components such as steering rods , shafts or forks with corresponding aluminum components produced by new processes. Weight savings of 20-30% are achievable depending on the basic conditions stipulated by the customer. Aluminum and magnesium die castings are already being used in steering columns , and further opportunities for weight reduction are being investigated. The lightweight steering column (Fig. 1) produced by Krupp Presta for the Audi A6 is a good example. By using magnesium die castings it has been possible to limit the weight of the steering column to just 5kg, a reduction of 15-20% over conventional (steel) designs.6 Steering column designExperience has shown that it is possible to design steering columns for cars more or less on the basis of their natural frequency alone. Additional engineering work may be required to design critical parts which must not break in the case of a crash or misuse (e.g. theft). The main task when engineering a steering column is thus to achieve the highest possible natural frequencies while minimizing weight. Low-stiffness components are being analyzed and refined in an effort to achieve uniform loading of the structure. In solving this task, use is made of numerical methods such as FEA. The structure is divided into finite elements which are characterized by specific deformation assumptions. Using FE analysis it is possible to examine complex structures, analyze sensitivities and links, discuss variations or ways of making improvements and optimize the structure numerically. Topological optimization is carried out for the analysis of low-stress areas and for the basic design of ribs and beads. CAD geometrydata are processed in an FE pre-processor. Correct modeling of the following is essential, individual parts, stiffness, contact faces, kinematics mass. Modeling is followed by computation and evaluation of the data obtained. The deformation energy is a global measure for assessing stresses. Normalizing the element deformation energy by the element mass provides information on the stresses acting on the element relative to its mass. The kinetic energy is regarded as the influence of vibrating masses which have a negative effect on the natural frequency of the steering column. By evaluating stress and strain conditions, highly localized weak points or high-stress areas can be identified.7 ConclusionsExisting technologies must be continuously adapted and improved in line with the requirements of the auto industry. Systematic weight reduction is a major challenge and requires close cooperation between vehicle manufacturers and suppliers. Materials, fabricating and joining technologies must be further refined. One prerequisite for the continuing success of Krupp Presta is the flexibility to react to customer wishes and requirements.Reference[1] Klein, B.:Leichtbau-Konstruktion. Berech- nungsgrundlagen und Gestaltung.Braunschweig: Vieweg, 1997一、简介汽车工业及其供应商,在未来的关键任务在于迅速制定和实施无害生态和经济上合理流动系统。
关于非线性整合控制的四轮转向装置和四轮扭矩车辆处理技术的发展Shinichiro Horiuchi!, Kazuyuki Okada!, Shinya Nohtomi"谢新译摘要:这篇文章介绍的是一个四轮转向装置和四轮扭矩的整体非线性控制系统。
这种持续的非线性预示的系统被应用于控制系统的设计。
这种四轮转向装置和每个轮子的扭矩协调的优点通过计算机模拟显示出来。
被带入到模拟中的驾驶力学叙述也被实施。
模拟的结果表示在被提议的非线性控制系统中那个车辆可操作性和安全性在条件受限制的情况下得到显著改良!1999年版权归日本公司和 Elsevier科学B.V.的汽车工程协会所有。
1.介绍在车辆设计中,底盘控制系统有向复杂转变的趋势。
底盘控制系统的三个主要部分是:侧部控制,垂直控制和纵观控制.这些系统是独立发展的去改善操纵,乘坐舒适性和附着摩擦/最好刹车性能来减轻驾驶的工作量。
在他们之中,有效的四轮转向装置系统的提高符合车辆转向能力及前后轮转向装置的相关法规。
这样的转向装置控制系统,通过车辆动力学的线模型描述,使得改善侧面的稳定和操纵性能变成可能[1]。
然而,当轮带接近附着力和侧面受力的非线性特性的极限的时候,四轮转向系统变的不怎么有效。
另一方面,在一个近的界限范围中,刹车和附着摩擦控制系统是有效的[2]。
由于4轮转向系统和轮子转力矩控制系统的适当协调,即使当道路情况是不怎么样的时候,车辆操作的巨大进步也可以实现[3]。
在4 WS 和direct yaw moment control(DYC)已经考虑到了。
在这一项研究中,线性4WS控制器,一个独立设计的DYC 控制器已被使用。
[4]线性模型相配理论和 LQ 控制理论被应用到整合控制系统的设计中。
Yu和Moskwa[5]计划了一个整合的控制系统,这个理论是从使用回应线性化技术和滑模态控制理论中来的。
回应线性化方式在控制浸透之前的控制决定方面遇到困难,回应线性化在一个如此情形中不容易成功。

浅析四轮转向系统在工程机械中的应用中英文Four wheel steering system is analysed in the application of engineering machinery工程机械广泛地被应用到设计生产建设的各个方面。
工程机械通常机身较长,转向不灵活,转弯半径大,与之相矛盾的是,工程机械的作业场地通常都狭窄,工作条件差,障碍物多,行驶路面凹凸不平,而且工程机械要求频繁转向。
这就提出一个迫切的任务,即如何减小工程机械的转弯半径,增加工程机械作业行走的稳定性和可靠性,即我们需要一种转向性能良好的工程机械转向系统。
Engineering machinery is widely applied to design every aspect of production and construction. Engineering machinery is longer than the fuselage, usually not flexible steering, the turning radius is big, and paradoxically, engineering machinery operation site is usually small, poor working conditions, obstacles, more road uneven, but also frequently turned to mechanical engineering requirements. It puts forward an urgent task that how to reduce engineering machinery turning radius, increase walking engineering machinery operation stability and reliability, namely, we need a kind of engineering machinery to the good performance of steering system.四轮转向系统是这些年来得到发展和应用的一种转向系统,从目前现状看来,进口的工程机械采用四轮转向技术屡见不鲜,可是国内对这一技术的研究几乎还处于空白。
四轮转向汽车的转向特性及控制技术东南大学机械工程系汪东明摘要:本文分析比较了四轮转向汽车的转向特点,概述了电控四轮转向汽车的结构原理,介绍了四轮转向系统的控制策略,指出了四轮转向系统控制技术所面临的困难,并展望其发展趋势。
关键词:四轮转向;转向特点;工作原理;控制;发展。
1、引言随着现代道路交通系统和现代汽车技术的发展,人们对汽车的转向操纵性能和行驶稳定性的要求日益提高。
作为改善汽车操纵性能最有效的一种主动底盘控制技术——四轮转向技术,于二十世纪80年代中期开始在汽车上得到应用,并伴随着现代汽车工业的发展而不断发展。
汽车的四轮转向(Four-wheel Steering ——4WS)是指汽车在转向时,后轮可相对于车身主动转向,使汽车的四个车轮都能起转向作用。
以改善汽车的转向机动性、操纵稳定性和行驶安全性。
2、四轮转向汽车的转向特性2·14WS汽车与2WS汽车转向过程分析普通两轮转向汽车(2WS汽车)的前轮既可绕自身的轮轴自转又可绕主销相对于车身偏转,而后轮只能自转而不偏转。
当驾驶员转动方向盘后,前轮转向,改变了行驶方向,地面对前轮胎产生一个横向力,通过前轮作用于车身,使车身横摆,产生离心力,使后轮产生侧偏,改变前进方向,参与汽车的转向运动。
而4WS汽车的后轮与前轮一样,既可自转也能偏转。
当驾驶员转动方向盘后,前、后轮几乎同时转向,使汽车改变前进方向,实现转向运动。
2WS汽车在转向时,前轮作主动转向,后轮只是作被动转向。
显然,2WS汽车在转向过程中,从方向盘转动到后轮参与转向运动之间存在一定的滞后时间。
2WS汽车的这种相位滞后特性使汽车转向的随动性变差,并使汽车的转向半径增大。
另外,2WS汽车在高速行驶时,相对于一定的方向盘转角增量、车身的横摆角速度和横向加速度的增量增大,使汽车在高速行驶时的操纵性和稳定性变差。
而4WS汽车在转向时,前、后轮都作主动转向,在转向过程中,灵敏度高,响应快,有效地克服了上述缺点。
汽车转向系统随着汽车电子技术的迅猛发展,人们对汽车转向操纵性能的要求也日益提高。
汽车转向系统已从传统机械转向、液压助力转向(Hydraulic Power Steering ,简称HPS) 、电控液压助力转向( Electric Hydraulic PowerSteering , 简称EHPS) ,发展到电动助力转向系统(Electric Power Steering ,简称EPS) ,最终还将过渡到线控转向系统(Steer By Wire ,简称SBW)。
机械转向系统是指以驾驶员的体力作为转向能源,其中所有传力件都是机械的,汽车的转向运动是由驾驶员操纵方向盘,通过转向器和一系列的杆件传递到转向车轮而实现的。
机械转向系由转向操纵机构、转向器和转向传动机械3大部分组成。
通常根据机械式转向器形式可以分为:齿轮齿条式、循环球式、蜗杆滚轮式、蜗杆指销式。
应用最广的两种是齿轮齿条式和循环球式(用于需要较大的转向力时) 。
在循环球式转向器中,输入转向圈与输出的转向摇臂摆角是成正比的;在齿轮齿条式转向器中,输入转向圈数与输出的齿条位移是成正比的。
循环球式转向器由于是滚动摩擦形式,因而正传动效率很高,操作方便且使用寿命长,而且承载能力强,故广泛应用于载货汽车上。
齿轮齿条式转向器与循环球式相比,最大特点是刚性大,结构紧凑重量轻,且成本低。
由于这种方式容易由车轮将反作用力传至转向盘,所以具有对路面状态反应灵敏的优点,但同时也容易产生打手和摆振等现象,且其承载效率相对较弱,故主要应用于小汽车及轻型货车上,目前大部分低端轿车采用的就是齿轮齿条式机械转向系统。
随着车辆载重的增加以及人们对车辆操纵性能要求的提高,简单的机械式转向系统已经无法满足需要,动力转向系统应运而生,它能在驾驶员转动方向盘的同时提供助力,动力转向系统分为液压转向系统和电动转向系统2 种。
其中液压转向系统是目前使用最为广泛的转向系统。
液压转向系统在机械系统的基础上增加了液压系统,包括液压泵、V 形带轮、油管、供油装置、助力装置和控制阀。
Mechanical DesignAbstract:A machine is a combination of mechanisms and other components which transforms, transmits. Examples are engines, turbines, vehicles, hoists, printing presses, washing machines, and movie cameras. Many of the principles and methods of design that apply to machines also apply to manufactured articles that are not true machines. The term "mechanical design" is used in a broader sense than "machine design" to include their design. the motion and structural aspects and the provisions for retention and enclosure are considerations in mechanical design. Applications occur in the field of mechanical engineering, and in other engineering fields as well, all of which require mechanical devices, such as switches, cams, valves, vessels, and mixers.Keywords: Mechanical Design ;Rules for Design ;Design ProcessThe Design ProcessDesigning starts with a need real.Existing apparatus may need improvements in durability, efficiency, weight, speed, or cost. New apparatus may be needed to perform a function previously done by men, such as computation, assembly, or servicing. With the objective wholly or partly.In the design preliminary stage, should allow to design the personnel fullyto display the creativity, not each kind of restraint. Even if has had many impractical ideas, also can in the design early time, namely in front of the plan blueprint is corrected. Only then, only then does not send to stops up the innovation the mentality. Usually, must propose several sets of design proposals, then perform the comparison. Has the possibility very much in the plan which finally designated, has used certain not in plan some ideas which accepts.When the general shape and a few dimensions of the several components become apparent, analysis can begin in earnest. The analysis will have as its objective satisfactory or superior performance, plus safety and durability with minimum weight, and a competitive cost. Optimum proportions and dimensions will be sought for each critically loaded section, together with a balance between the strengths of the several components. Materials and their treatment will be chosen. These important objectives can be attained only by analysis based upon the principles of mechanics, such as those of static for reaction forces and for the optimum utilization of friction; of dynamics for inertia, acceleration, and energy; of elasticity and strength of materials for stress and deflection; of physical behavior of materials; and of fluid mechanics for lubrication and hydrodynamic drives. The analyses may be made by the same engineer who conceived the arrangement of mechanisms, or, in a large company, they may be made by a separate analysis division or research group. Design is a reiterative and cooperative process, whetherdone formally or informally, and the analyst can contribute to phases other than his own. Product design requires much research and development. Many Concepts of an idea must be studied, tried, and then either used or discarded. Although the content of each engineering problem is unique, the designers follow the similar process to solve the problems.Product liability suits designers and forced in material selection, using the best program. In the process of material, the most common problems for five (a) don't understand or not use about the latest application materials to the best information, (b) failed to foresee and consider the reasonable use material may (such as possible, designers should further forecast and consider due to improper use products. In recent years, many products liability in litigation, the use of products and hurt the plaintiff accused manufacturer, and won the decision), (c) of the materials used all or some of the data, data, especially when the uncertainty long-term performance data is so, (d) quality control method is not suitable and unproven, (e) by some completely incompetent persons choose materials.Through to the above five questions analysis, may obtain these questions is does not have the sufficient reason existence the conclusion. May for avoid these questions to these questions research analyses the appearance indicating the direction. Although uses the best choice of material method not to be able to avoid having the product responsibility lawsuit, designs the personnel and the industry carries on the choice of material according to thesuitable procedure, may greatly reduce the lawsuit the quantity.May see from the above discussion, the choice material people should to the material nature, the characteristic and the processing method have comprehensive and the basic understanding.Finally, a design based upon function, and a prototype may be built. If its tests are satisfactory, the initial design will undergo certain modifications that enable it to be manufactured in quantity at a lower cost. During subsequent years of manufacture and service, the design is likely to undergo changes as new ideas are conceived or as further analyses based upon tests and experience indicate alterations. Sales appeal.Some Rules for DesignIn this section it is suggested that, applied with a creative attitude, analyses can lead to important improvements and to the conception and perfection of alternate, perhaps more functional, economical,and durable products.To stimulate creative thought, the following rules are suggested for the designer and analyst. The first six rules are particularly applicable for the analyst.1. A creative use of need of physical properties and control process.2. Recognize functional loads and their significance.3. Anticipate unintentional loads.4. Devise more favorable loading conditions.5. Provide for favorable stress distribution and stiffness with minimum weight.6. Use basic equations to proportion and optimize dimensions.7. Choose materials for a combination of properties.8. Select carefully, stock and integral components.9. Modify a functional design to fit the manufacturing process and reduce cost.10. Provide for accurate location and noninterference of parts in assembly.Machinery design covers the following contents.1. Provides an introduction to the design process , problem formulation ,safety factors.2. Reviews the material properties and static and dynamic loading analysis ,Including beam , vibration and impact loading.3. Reviews the fundamentals of stress and defection analysis.4. Introduces fatigue-failure theory with the emphasis on stress-life approaches to high-cycle fatigue design, which is commonly used in the design of rotation machinery.5. Discusses thoroughly the phenomena of wear mechanisms, surface contact stresses ,and surface fatigue.6. Investigates shaft design using the fatigue-analysis techniques.7. Discusses fluid-film and rolling-element bearing theory and application8. Gives a thorough introduction to the kinematics, design and stress analysis of spur gears , and a simple introduction to helical ,bevel ,and worm gearing.9. Discusses spring design including compression ,extension and torsion springs.10. Deals with screws and fasteners including power screw and preload fasteners.11. Introduces the design and specification of disk and drum clutches and brakes.Machine DesignThe complete design of a machine is a complex process. The machine design is a creative work. Project engineer not only must have the creativity in the work, but also must in aspect and so on mechanical drawing, kinematics, engineerig material, materials mechanics and machine manufacture technology has the deep elementary knowledge.One of the first steps in the design of any product is to select the material from which each part is to be made. Numerous materials are available to today's designers. The function of the product, its appearance, the cost of thematerial, and the cost of fabrication are important in making a selection. A careful evaluation of the properties of a. material must be made prior to any calculations.Careful calculations are necessary to ensure the validity of a design. In case of any part failures, it is desirable to know what was done in originally designing the defective components. The checking of calculations (and drawing dimensions) is of utmost importance. The misplacement of one decimal point can ruin an otherwise acceptable project. All aspects of design work should be checked and rechecked.The computer is a tool helpful to mechanical designers to lighten tedious calculations, and provide extended analysis of available data. Interactive systems, based on computer capabilities, have made possible the concepts of computer aided design (CAD) and computer-aided manufacturing (CAM). How does the psychologist frequently discuss causes the machine which the people adapts them to operate. Designs personnel''s basic responsibility is diligently causes the machine to adapt the people. This certainly is not an easy work, because certainly does not have to all people to say in fact all is the most superior operating area and the operating process. Another important question, project engineer must be able to carry on the exchange and the consultation with other concerned personnel. In the initial stage, designs the personnel to have to carry on the exchange and the consultation on the preliminary design with the administrative personnel, and is approved.This generally is through the oral discussion, the schematic diagram and the writing material carries on.If front sues, the machine design goal is the production can meet the human need the product. The invention, the discovery and technical knowledge itself certainly not necessarily can bring the advantage to the humanity, only has when they are applied can produce on the product the benefit. Thus, should realize to carries on before the design in a specific product, must first determine whether the people do need this kind of productMust regard as the machine design is the machine design personnel carries on using creative ability the product design, the system analysis and a formulation product manufacture technology good opportunity. Grasps the project elementary knowledge to have to memorize some data and the formula is more important than. The merely service data and the formula is insufficient to the completely decision which makes in a good design needs. On the other hand, should be earnest precisely carries on all operations. For example, even if places wrong a decimal point position, also can cause the correct design to turn wrongly.A good design personnel should dare to propose the new idea, moreover is willing to undertake the certain risk, when the new method is not suitable, use original method. Therefore, designs the personnel to have to have to have the patience, because spends the time and the endeavor certainlycannot guarantee brings successfully. A brand-new design, the request screen abandons obsoletely many, knows very well the method for the people. Because many person of conservativeness, does this certainly is not an easy matter. A mechanical designer should unceasingly explore the improvement existing product the method, should earnestly choose originally, the process confirmation principle of design in this process, with has not unified it after the confirmation new idea.外文论文翻译译文机械设计摘要:机器是由机械装置和其它组件组成的。

资料来源:True Four Wheel Drive System For Vehicle Four Wheel Drive System For Vehicle真正的四轮驱动车辆ABSTRACTA drive train for a four wheel drive vehicle including a front difforential engaged with a front drive shaft and front axles through a front differential gear set. The front differential includes a front bi-directional overrunning clutch that con-trols transmission of torque transfer between the front drive shaft and the front axles. A rear differential is engaged with rear axles and the transmission through a rear differential gear set. The rear differential includes a rear bi-directional over-running clutch that controls torque transfer between the trans-mission and the rear axles. The differentials are configured with a gear ratio that is within five percent of a l: 1 gear ratio.TRUE FOUR WHEEL DRIVE SYSTEM FOR VEHICLERELATED APPLICATIONThis application is related to and claims priority from U.S. Provisional Application 61/677,820, the disclosure of which is incorporated herein by reference in its entirety.FIELD OF THE INVENTIONThe invention relates to drive systems and, more particularly, to an improved drive system designed to provide substantially true four wheel drive capability.BACKGROUNDprovide four wheel drive capability. Those systems are all designed to engage all four wheels but also allow a speed differential across the axle. However, many of those systems do not provide true four wheel drive where each wheel pro-vides substantially the same speed during all drive conditions. Instead, the systems permit some degree of slippage.Current Four Wheel Drive Bi-Directional Overrun-ning Clutch SystemsI illustrates the drive system for a conventional four wheel drive vehicle with a front bi-directional over-rul111ing clutch. The drive system includes four wheels. The rear left wheel RLW is connected to a rear differential RD through a rear left axle RLA. The right rear wheel RRW is com1ected to the rear differential RD through a rear right axle RRA. The front left wheel FLW is col111ected to a front dif-ferential FD through a front left axle FLA. The front right wheelFRW is connected to the front differential FD through a front right axle FRA.mission T through a rear drive shaft RDS. The front differen-tial FD is connected to the transmission T through a front drive shaft EDS.Straight Line Operation:During straight line driving while the vehicle is in a four wheel on demand mode (i.e., four wheel drive engages only when needed) both rear wheels RLW, RRW are the primary drive wheels and are co1111ected through the rear differential RD to rotate at the same speed. In a non-slip condition of the rear wheels, the front drive shaft FDS is engaged to the front differential FD, but the front axles FLA, FRA are not engaged with the front differential. That is, the front axles FLA, FRA and front wheels FLW, FRW are gen-erally in an overrun condition such that the front differential FD is not driving the front axles FLA, FRA and, therefore, not transmitting any torque to the front wheels. This means that the front wheels FLW. FRW are free to rotate at their actual ground speeds.In order for the front wheels to be engaged, the rear wheels must slip (break traction) or spin increase speed approximately 20% faster than the front wheels. While driv-ing in a straight line, once the rear wheels slip 20%, the overrunning condition in the front differential ED is over-come and both front axles are engaged. This results in the transmission T transmitting torque to the front wheels thru the front drive which is geared in a way that decreases the vehicles ground speed. When the ground speed has increased so as to cause the rear wheel speed to be rotating less than 20% faster than the ground speed, or the speed of the rear wheel has decreased so as to be rotating less than 20% faster than the ground speed, the front wheels will start to overrun again and no torque will be transmitted to the front wheels.Turning Operation:In a comer all four wheels are trying to rotate at different speeds, This is shown on the chart in FIG. 4 which depicts wheel revolutions vs. turning radius for all four wheels. For a vehicle with alocked rear axle or solid axle (i.e., an axle where the rear axles RLA, RRA are connected, either physically or through gearing, such that they always rotate at the same speed) the ground speed is dictated by the rear outside wheel due to vehicle dynamics (i.e., the rear outside wheel has to cover more circumferential distance than the rear inside wheel when turning around a common axis.) Since both rear wheels are rotating at the same speed and the rear outside wheel is the drivewheel the rear inside wheel is beginuing to scrub or drag on the ground. This can cause inefficiencies, turf wear and/or tire wear.The primary reason conventional bi-directional ovemnming clutch four wheel drive systems have a 20% under drive is for turning. With the rear outside wheel dictat-ing ground speed the front inside wheel will go slower than the rear outside wheel as shown in FIG. 4. If there is no under drive the bi-directional oveITllllling clutch for the front inside axle would engage and begin to drive torque. This would cause the front inside wheel to travel at an incorrect speed and would create inefficiencies, turf wear, tire wear and, more importantly, torque steer.As mentioned above, during a tum the rear outside wheel is dictating ground speed, the rear inside wheel is scrubbing or dragging, and the front wheels are overrunning. Referring to FIG. 5 which depicts the percentage difference between the front and rear wheel speeds versus the turning radius of a locked rear axle, once the rear outside wheel slips or spins a certain percentage, dictated by vehicle geometry and turning radius. the bi-directional overru1ming clutch con-trolling the transfer of torque to the front inside wheel will engage and drive torque through the front inside wheel At this time both rear wheels and the front inside wheel are driving torque and their speed is dictated by the drive line, not ground speed. The front outside wheel is still ovemmning allowing it to spin at the rotational speed dictated by ground speed and vehicle geometry. When both rear wheels and the front inside wheel slip a certain percentage, again dictated by vehicle geometry and the turning radius, the bidirectional clutch con-trolling torque transfer to the front outside wheel will engage and torque will be transmitted to all four wheels, even though three of the wheels would be slipping.WedgingThe existing drive system is prone to a condition called wedging. Wedging occurs when torque is being driven through the bidirectional over-numing clutch and a rapid direction change occurs. This can cause the rollers in the clutch to be positioned or locked on the wrong side of the clutch profile preventing the output hubs from overru1ming. The effect causes the front drive to act like a solid axle, but with the 20% speed difference in the drive line it results in scrubbing of the front tires. This condition can cause exces-sive tire wear and turf wear. This also effects steering effort and stability of the vehicle. The vehicle will try to maintain a straight line due to the effect of the front drive acting like a solid axle.Because of the wedging condition in the current systems precautions are put into place to help reduce wedging. One of these precautions is the use of a cut-off switch so that when the vehicle is shifted from the forward direction to the reverse direction so as to automatically disengage the bi-directional overrum1ing clutch (for example, shutting off the coil that is indexing the roll cage). This system also uses the cut-off switch when transitioning from the reverse direc-tion to the forward direction. Another way to reduce wedging is the use of a switch, when the brakes are applied, that will interrupt power to the 4 wheel drive system. Many other methods can be used to reduce wedging, but none are 100% percent effective with the 20% difference in drive line speeds.Conventional Drive Systems:A common conventional drive system would have the same vehicle layout as in FIG. 1, but the mechanisms in the front and rear differentials would be different. Most com-mon drive systems have an open differential with the ability to be locked into a solid axle in both the front and rear differen-tials. The drive line in a conventional system would also be using a drive line that is geared to a 1: 1 ratioStraight Line Operation:During straight line driving while the vehicle is in four wheel drive and all the axles are unlocked, all four wheels are rotating at the same speed. This is due to the drive line being geared at 1:1 ratio and the front and rear differen-tials are being driven at the same speed and no differentiation is needed across the axles. This is also the case when any or both of the front and rear differentials are in a locked position creating a solid axle.Turning operation:Conventional four wheel drive systems will nor-mally have the rear differential locked and the front drive will be in the open state until the solid axle mode is selected by the user. During turning with a solid axle in the rear differential and an open differential in the front, only one tire is turning at the correct ground speed. Due to vehicle dynamics the rear outside wheel is considered the drive wheel and is turning at ground speed. The inside rear wheel is being driven at the same speed as the rear outside, but the ground speed is slower. This causes the inside rear wheel to scrub or slip during a tum. (0023] Since the two front wheels are connected to an open differential, they are allowed to differentiate across the axle, However, the differential is beingdriven at an incorrect speed. That is, the front open differential takes the input speed and averages it across the axle. In a normal non slip condition the average speed across the axle is centered about the middle of he vehicle. Since the rear outside wheel is traveling at a different speed ( or arc) than the average of the two front wheels, both front wheels are scrubbing when in a tum caus-ing un-needed drive line torque or drive line bind.Once the operator selects the solid axle mode of the vehicle, both front wheels are locked together and they now rotate at the same speed. When turning, the outside front wheel is going slower than what ground speed dictates, thus causing the wheel to scrub. At the same time the inside front wheel is going faster than the ground speed dictates causing it to, likewise, scrub.Due to the wheels being driven at the wrong speeds in a comer, conventional drive systems are not very efficient. They cause severe turf damage or wear due to the tires scrub-bing. They also cause tire wear due to the scrubbing. The tires being driven at the wrong speeds also cause issues with steer-ing and turning performance of the vehicle. The difference between ground and actual wheel speed results in the wheels trying to straighten the vehicle out. This cause's increased wear in steering components, as well as rider fatigue since increased input is needed to maintain the vehicle in the tum. Many manufacturers have added power steering to try to minimize operator input when cornering because of the four wheel drive operations.A need therefore exists for an improved four wheel drive system that incorporates bi-directional overrunning clutches in a drive system that minimizes scrubbing in all wheels while permitting 1.1 or near 1: 1 gear ratio between the front and rear axles.SUMMARY OF THE INVENTIONThe present invention is directed to drive train for a four wheel drive vehicle. The drive train includes a front drive shaft connected to a transmission. Two front axles with each axle connected to a corresponding front wheel. A front dif-ferential is engaged with the front drive shaft and the front axles through a front differential gear set. The front differen-tial includes a front bi-directional overrunning clutch that controls transmission of torque transfer between the front drive shaft and the front axles.The front bi-directional ovemmning clutch includes a front clutch housing connected to the front drive shaft so as to be rotatable by the front drive shaft, the front clutch hous-ing including an inner cam surface. A front roller assembly is located inside the front clutch housing andadjacent to the cam surface. The front roller assembly includes a roll cage with a plurality of rollers arranged in two sets within slots formed in the roll cage, the rollers are rotatable inside the slots. A plurality of springs are arranged in the roll cage to position the rollers within the slots. The roll cage is rotatable within the front clutch housing. (0029] Two front hub are located in the front clutch hous-ing. Each hub is positioned radially inward from a set of the rollers located between an outer surface of the front hub and the im1er cam surface. Each front hub is engaged with an axial end of one of the front axles so as to rotate in combination with the axle. The front hubs are independently rotatable within the roll cage and the front clutch housing.A front engagement control assembly is located within the housing and controls engagement and disengage-ment of the front bi-directional overrunning clutch. The front engagement control assembly includes an electromechanical device that is controllable for impeding rotation of the roll cage relative to the front clutch housing so as to index the roll cage relative to the front clutch housing.When the engagement control assembly is activated and the roll cage is indexed relative to the clutch housing, the front bi-directional overrunning clutch is configured to trans-mit torque from the front drive shaft to the front axles when the front clutch housing is rotating faster than the front axles. Also, when the vehicle is traveling straight the front differen-tial is configured to begin to transmit torque from the front drive shaft to the front axles at a first speed.The gear train including two rear axles, each axle com1ected to a corresponding rear wheel.A rear differential is engaged with the rear axles and the transmission through a rear differential gear set. The rear differential including a rear differential housing and a rear bi-directional overrunning clutch that controls torque transfer between the transmission and the rear axles.The rear bi-directional overrunning clutch includes a rear clutch housing located within the rear differential !mus-ing and rotatable by the transmission, the rear clutch housing including an inner cam surface. A rear roller assembly is located inside the rear clutch housing and adjacent to the cam surface. The rear roller assembly includes a roll cage with a plurality of rollers arranged in two sets within slots formed in the roll cage. The rollers are rotatable inside the slots. A plurality of springs are arranged so as to position the rollers within the slots. The roll cage is rotatable within the rear clutch housing.Two rear hubs are located in the rear clutch housing. Each hub is positioned radially inwardfrom a set of the rollers located between an outer surface of the rear hub and the im1er cam surface. Each rear hub is engaged with an axial end of one of the rear axles so as to rotate in combination with the axle. The rear hubs are independently rotatable within the roll cage and the rear clutch housing.The rollers in each set of the rear roller assembly are adapted to wedgingly engage the corresponding rear hub to the rear clutch housing when one of either the rear hub or rear clutch housing is rotating faster than the other so as to trans-mit torque from whichever is faster to whichever is slower.The differentials are configured such that when the vehicle is traveling straight and the rear differential is trans-mitting torque to the rear axles. The rear differential is con-figured to rotate the rear axles at a second speed, and where the difference between the first speed and the second speed is five percent or less. In one preferred embodiment, the differ-ence between the first speed and the second speed is less than about three percent. In another embodiment there is substan-tially no difference between the first speed and the second speed.In one embodiment, the front bi-directional over-running clutch includes an armature plate that is engaged or connected with the front roll cage such that the armature plate rotates with the roll cage. The front engagement control assembly impedes rotation of the roll cage relative to the front clutch housing by engaging the amiature plate so as to index the roll cage relative to the clutch housing.Preferably the hubs are substantially coaxially aligned with each other within the housing. and are adapted to rotate about a common axis within the housing.In one embodiment, the rear differential is part of a transaxle which is engaged with the transmission. 。
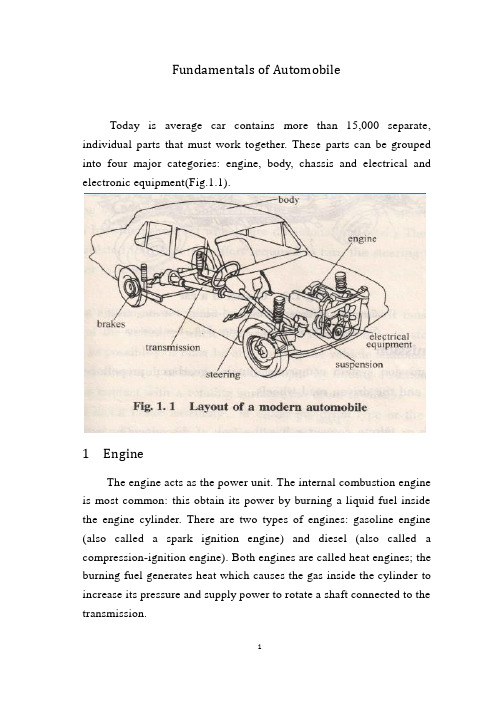
Fundamentals of AutomobileToday is average car contains more than 15,000 separate, individual parts that must work together. These parts can be grouped into four major categories: engine, body, chassis and electrical and electronic equipment(Fig.1.1).1 EngineThe engine acts as the power unit. The internal combustion engine is most common: this obtain its power by burning a liquid fuel inside the engine cylinder. There are two types of engines: gasoline engine (also called a spark ignition engine) and diesel (also called a compression-ignition engine). Both engines are called heat engines; the burning fuel generates heat which causes the gas inside the cylinder to increase its pressure and supply power to rotate a shaft connected to the transmission.2 BodyAn automobile body is a sheet metal shell with windows, doors, a hood, and a trunk deck built into it. It provides a protective covering for the engine, passengers, and cargo. The body is designed to keep passengers safe and comfortable. The body styling provides an attractive, colorful, modern appearance for the vehicle.3 chassisThe chassis is an assembly of those systems that are the major operating parts of a vehicle. The Chassis includes the transmission, suspension, steering, and brake system.3.1 TransmissionThe transmission system comprises clutch, gearbox, propeller shaft, rear axle and differential and the driven road wheels.ClutchThe clutch or torque converter has the task of disconnecting and connecting the engine's power from and to the driving wheels of the vehicle. This action may be manual or automatic.GearboxThe main purpose of the gearbox is to provide a selection of gear ratios between the engine and driving wheels, so that the vehicle can operate satisfactorily under all driving conditions. Gear selection may be done manually by the driver or automatically by a hydraulic control system.Propellor shaftThe function of the propeller (drive) shaft is to transmit the drivefrom the gearbox to the input shaft of the rear axle and differential assembly. Flexible joints allow the rear axle and wheels to move up and down without affecting operation.The role of the drive shaft from the transmission the driving force transmitted to the rear axle input shaft and the differential assembly. Universal joint allows the rear axle and wheels move up and down without affecting operation.Rear axle and differentialThe rear axle and differential unit transmits the engine's rotational power through 90 from propshaft to axle shaft to axle shaft to road wheels. A further function is to allow each driven wheel to turn at a different speed; essential when cornering because the outer wheel must turn further than the inside wheel. A third function is to introduce another gear ratio for torque multiplication.3.2 SuspensionThe axles and wheels are isolated from the chassis by a suspension system . The basic job of the suspension system is to absorb the shocks caused by irregular road surfaces that would otherwise be transmitted to the vehicle and its occupants, thus helping to keep the vehicle on a controlled and level course, regardless of road conditions.3.3 SteeringThe steering system, under the control of the driver at the steering wheel, provides the means by which the front wheels are directionally turned. The steering system may be power assisted to reduce the effort required to turn the steering wheel and make the vehicle easier to manoeuvre.3.4 BrakesThe braking system on a vehicle has three main functions. It must be able to reduce the speed of the vehicle, when necessary; it must be able to stop the car in as short a distance as possible; it must be able to hold the vehicle stationary. The braking action is achieved as a result of the friction developed by forcing a stationary surface(the brake lining)into contact with a rotating surface(the drum or disc).Each wheel has a brake assembly of either the drum type or the disc type, hydraulically operated when the driver applies the foot brake pedal.4 Electrical Equipment and InstrumentationThe electrical system supplies electricity for the ignition, horn, lights, heater, and starter. The electricity level is maintained by a charging circuit. This circuit consists of a battery, and an alternator (or generator). The battery stores electricity. The alternator changes the engine's mechanical energy into electrical energy and recharges the battery.The motor vehicle incorporates a number of electrical devices that are used for:Battery charging –alternator and regulator.Engine purposes –starting and ignition.Safety and convenience –lighting, horn, wipers, washers etc.Driver information –instrumentation and warning lamps.Of these devices instrumentation is, perhaps, most influenced by the advance of microelectronics. The basic electromechanical systems of:Speedometer –for indicating vehicle speed.Engine oil pressure –warning lamp or gauge to show operating limits.Engine coolant temperature –warning lamp or gauge to show operating limits.Battery charging –warning lamp or gauge to indicate satisfactory/unsatisfactory action.Fuel tank content –gauge to show amount of fuel in the fuel tank.are giving way to computerized vehicle management information centres.The Steering System1 The Steering GearThe steering gear mechanism enables the driver to turn the front wheels of the car. The mechanism consists of a steering gear box, pitman arm, drag link, tie rods, steering arms, and steering knuckles, the latter supporting the front wheels(Fig.6.1).Turning the steering wheel turns the steering shaft to which a worm gear is attached within the steering gear box. The steering worm moves a roller through a part of an arc, the motion of which is transmitted to the pitman arm, which moves back and forth across the width of the frame. Several arrangements of rods and levers are in common use but, in general, a drag link, connected to the pitmen arm, transmits the movement to tie rods which are connected to the steering arms. Sideward movement of the steering arms turns the steering knuckles, and the wheels, as they are pivoted on front end support mechanism.There are two types of steering system: manual steering system and power steering system. In the manual type, the driver does all the work of turning the steering wheel, steering gears, wheels, and tires. In the power type, hydraulic fluid assists the operation so that the driver's effort is reduced.Mechanical steering system: And changes the transmission systemby the diverter to be composed.Diverter: By the steering wheel, the steering wheel steering axle, changes meshing to pay (diverter) to be composed.Steering transmission system: By drop arm (drop arm), drag link, drag link arm, about trapezoidal arm, steering knuckle tie rod, if a dry bulb joint composes.Power steering system: Changes the augmenter constitution by mechanical steering system Canada.A typical power steering system needs a power steering pump and reservoir in addition to the steering gear(Fig.6.2). These parts store the hydraulic fluid and provide the hydraulic pressure to assist steering. In most instances, a V-belt from the engine power the hydraulic pump. Hoses lead from the pump to the steering gear and back to the pump.In steering gear box the gear is slightly larger and has other parts. The wormshaft is the same in both systems. Instead of a ball nut, though, the power steering system uses a power piston or rack piston in steering gear box. The power piston has teeth on one side that meshwith the sector teeth. The forward and backward motion of the power piston moves the sector, pitman shaft, and steering linkage.The power steering gear also uses a control valve to send hydraulic fluid into the steering gear at the right time. When the steering wheel starts to move in either direction, the valve opens its ports to sent fluid under pressure into the main chamber of the steering gear. The fluid pushes against the power piston and assists the motion of the steering wheel.Fig.6.2 In an integral power steering system, the power and control are in the same housing as the steering gear2 Front-GeometryThe front wheels are arranged at various angles to the car frame to provide good steering control and stability. The angles are discussed in the following order: caster, camber, steering axis inclination, toe, and turning radius.Caster is the slant of the kingpin forward at the bottom(Fig.6.3). (NOTE: Modern passenger car does not use a kingpin in an independently mounted front wheel suspension, but reference to its former position helps to clarify some front end concepts. The positionof the kingpin would be on a direct line drawn between the two ball joints). The front wheels, when provided with the proper amount of caster, will align themselves in the direction in which the car is moving. Too much caster will cause hard steering and shimmy at low speed. Too little caster will cause wander or weave at high speed and erratic steering when applying the brakes.Camber is the angle between a vertical line and a line drawn through the center of the wheel(Fig.6.4). The top of the wheel is inclined away from the car. The purpose of camber is to place the center of the tire directly under the extended line of the kingpin for easier steering. This places the weight of the car directly over the pivot point.Steering Axis Inclination is the outward tilt of the bottom of the kingpin toward the wheel(Fig.6.5). Modern engineering practice is to minimize camber in order to reduce uneven tire wear, and increase theFig.6.3 Caster Fig.6.4 Camber angular inclination of the kingpin to place its centerline directly under the center of the tire for ease in steering.Steering axis inclination also provides steering stability by raisingthe entire front end of the vehicle during a turn. Gravity causes the spindle ends to tend to return to their straight ahead position. This force is not enough to cause steering, but is enough to provide excellent directional stability. Steering axis inclination is probably a more important steering stability factor than caster.Toe-in is the difference in distance between the front and rear of the front tires, measured at spindle height(Fig.6.6). That is, the wheels are aimed slightly in as if to cross each other, it seems to cross each other's path. Due to compression of the steering linkage parts, the front wheels tend to turn out or away from each other. To offset this, they are provided with a small amount of toe-in. In operation, the wheels travel parallel paths and no side scuffing occurs.Fig.6.5 Steering axis inclinationTurning Radius, or toe-out on turns, is needed when turning a corner. Because the outside wheel on a curve turn about a longer arcthan does the inside wheel, it is necessary to have the inside wheel turn at a sharper angle to prevent tire scuffing and wear. To obtain this action, the steering arms are set at an angle to the wheels. Although the tie rod moves each arm an equal distance, the angular movement is unequal and the wheels toe-out. The sharper the turning angle, the more toe-out results.Fig.6.6 Toe-in汽车部件目前大多数的汽车由超过15000个各自独立的零部件组成,这些零部件必须一起配合工作。
外文资料及翻译Steering system(1)To change the control mechanism basically mainly by the steering wheel, the steering axle, the steering tube column and so on to be composed.(2) Diverter becomes steering wheel's rotation steering arm's swinging or the rack axis straight reciprocating motion, and to changes the control force to carry on the enlargement the organization. The diverter fixes generally on the automobile frame or the automobile body, changes the control force after the diverter generally will also change the transmission direction.(3) Steering transmission system the strength which and the movement outputs the diverter passes to the wheel (knuckle), about and causes the wheel to carry on the deflection according to certain relations the organization.TypeCrooked to energy difference, the steering system may divide into the machinery steering system and the power steering system two broad headings crooked.Mechanical steering system: And changes the transmission system by the diverter to be composed.Diverter: By the steering wheel, the steering wheel steering axle, changes meshing to pay (diverter) to be composed.Steering transmission system: By drop arm (drop arm), drag link, drag link arm, about trapezoidal arm, steering knuckle tie rod, if a dry bulb joint composes.Power steering system: Changes the augmenter constitution by mechanical steering system Canada.1.Mechanical steering system The mechanical steering system changes the energy by pilot's physical strength achievement, all power transmission are the machinery. The mechanical steering system by changes the control mechanism, the diverter and changes the transmission system three major part to be composed.(1) steering control mechanismChanges the control mechanism by the steering wheel, the steering axle, the steering tube column and so on to be composed, its function is rotates the pilot steering wheel's control force to pass to the divertor.(2) DivertorThe diverter (also often is called steering unit) is completes from the rotary motion to the translation (or approximate straightline motion) a group of gear mechanism, simultaneously is also in the steering system speed reducer drive. At present the commonly used toothed wheel rack type, follows round the world the crank to refer to sells the type, the worm bearing adjuster crank to refer to sells the type, to follow round the world - the tooth rack tooth fan type, the worm bearing adjuster hoop type and so on. We mainly introduce the first several kinds.1) Gear rack type divertorThe gear rack type diverter divides the both sides output type and among (or single end) the output type two kinds .The both sides output's gear rack type diverter, changes the gear shaft as the transmission vice-host moving parts and installs through the bearing in the diverter shell, its upper extreme through spline and universal joint sliding yoke and steering axle connection. With the steering gear meshing steering rack level arrangement, the both sides with change the steering knuckle tie rod through a ball place to be connected. The spring presses through the briquetting the rack depending in the gear, guarantees ceaseless meshing.Spring's pretightening up force available adjustment thread plug adjustment. When rotates the steering wheel, the diverter gear-driven, causes with it meshing rack along the end motion, thus about causes the steering knuckle tie rod to lead about the knuckle to rotate, causes to change the wheel deflection, thus realizes motor turning.Middle output gear rack type diverter, its structure and principle of work and both sides output gear rack type diverter basic same, the difference lies in it to change the steering knuckle tie rod in steering rack's middle with the bolt with about to be connected. On single-ended output's gear rack type diverter, a rack's end with changes the steering knuckle tie rod through the inside and outside bracket to be connected.2) Follows round the world-like the divertorFollows round the world-like the diverter is one of present domestic and foreign application most widespread structure patterns, generally has two-stage drive, the first level is screw rod nut transmission, the second level is tooth rack tooth fan transmission.In order to reduce between the steering screw steering nut's friction, the two's thread immediate contact, during is loaded with many steel balls, realizes the rolling friction. On the steering screw and the nut processes the profiled outline is two section or three section of not concentric circular arc composition approximate semicircle spiral groove. The two's spiral groove can coordinate to form the approximate circular cross section the spiral tubular channel.The nut side has two pair of through holes, may henceforth the vent plug enter the steel ball in the helix channel. Outside the steering nut has two steel ball drive pipes, each drive pipe's both sides insert the nut side separately in a pair of through hole. In the drive pipe has also packed the steel ball. Thus, in two drive pipes and nut's spiral tubular channels combine two respectively independent seals the steel ball " the flow channel ".When the steering screw rotates, passes to the steering nut through the steel ball the strength, the nut namely along the end motion. At the same time, friction couple function between the screw rod and the nut and under the steel ball, all steel balls then rolls in the spiral tubular channel, formation " ball class ". When the diverter works, two rows steel balls are only in the respective seal flow channel internal recycling, will leave.3) The worm bearing adjuster crank refers to sells the type diverterThe worm bearing adjuster crank refers to sells the type diverter's transmissionvice-(by the steering worm primarily moving parts, it is installs from themoving parts in the rocker arm shaft crank nose refers to sells. When the steering worm rotates, refers to with it meshing sells namely circles the rocker arm shaft spool thread along the circular, and leads the rocker arm shaft rotation.(3) Steering transmission systemSteering transmission system the function is the strength which and the movement outputs the diverter passes to the steering axle both sides the knuckle, causes the both sides wheering wheel deflection, and causes two wheering wheel deflection angles according to certain relational change, guarantees when motor turning the wheel and the ground relative sliding is as far as possible small.1)Uses for parts with the non-independent suspension fork changes the transmission system mainly to include the steering arm, to change the drag link, the steering, and the steering trapezium. In the front axle is only in the steering axle situation, by changes the steering trapezium general arrangement which the steering knuckle tie rod and the left and right trapezoidal arm are composed after the front axle, when the wheering wheel is in with the automobile straight line travel corresponding neutral point, trapezoidal arm and steering knuckle tie rod in and path parallel plane (horizontal plane) in angle of intersection >90.In the engine position is low or in the steering axle concurrently sufficient driving axle's situation, to avoid the movement interference, often steering trapezium arrangement before the front axle, this time above angle of intersection <90, if the steering arm is not around swings in the automobile fore-and-aft plane, but is shaking right toward left with the path parallel plane, then may change the drag link horizontal, and sells taking advantage of ball leads directly changes the steering knuckle tie rod, thus pushes somebody into doing something the both sides trapezoidal arm rotation.2)Uses for parts with the independent suspension fork changes the transmission systemWhen wheering wheel independent suspension, each wheering wheel needs to be opposite in the frame makes the independence movement, thus the steering axle must be the separation type. With this corresponding, changes in the transmission system the steering trapezium also to be the separation type.,As shown in Figure 9 b. If Pitman is not in the vehicle longitudinal plane backwards and forwards, but is in the plane parallel to the road to shake, you can bring the steering linkage 3 exhaust, and ball head pin directly driven steering tie rod 6, thus pushing the sides of a trapezoid arm. 2) and independent suspension with the steering linkage when steering wheel independent suspension, each steering wheel needs relative to the frame for independence movement, thereby steering bridge must be disconnected. And accordingly, steering linkage of steering or must be disconnected.The role of steering lever is passed from the Pitman force and motion to steering arm (or steering). It force existing tension and pressure, so direct lever is is the use of high-quality special steel manufacturing, in order to ensurereliable operation. Linkage of typical structure as shown in Figure 11. In the steering wheel to deflect or elastic deformation due to the suspension and relative to the frame beats, steering lever and Pitman and steering relative movements are spatial movement, in order not to occur, the interference of the three connections takes the ball PIN. 4) Steering damper as speed increases, the modern automobile steering wheel sometimes generate shimmy (steering wheel around the kingpin axis reciprocating swing, even whole body vibration), which not only affect vehicle stability, but also affected comfort, aggravate the nose wheel wear and tear. In the steering linkage in setting steering damper is to overcome the steering wheel shimmy of effective measures. Steering damper side of the body (or front axle) articulated, the other end and steering lever (or articulated steering).Use mechanical steering can implement steering, when steering axle load larger that the pilot's manual as steering energy is difficult to turn smoothly. Power steering system is in mechanical steering system on the basis of a set of steering device. Steering device reduces driver operated steering wheel. Steering energy from the driver's physical strength and motor (or motors), engine (or motors) accounted for the major part, through the steering device. Normally, pilots can easily control the steering. But in the steering device failure, I went back to mechanical steering system state, in general but also by the driver's steering tasks independently. (1) hydraulic power steering systems-which belongs to the steering device part is: steering pump 7, steering tubing 8, steering, and is located in the integral oil tank 6 EPS 4 internal steering control valve and steering power cylinder 5, etc. When the pilot turned the steering wheel 1 by mechanical steering makes steering tie rod 9 mobile, and driven steering, the steering wheel deflection, thus changing the car driving direction. At the same time, the steering shaft also driven steering internal rotation of the steering control valve, the hydraulic steering power cylinder produces helps the driver's steering forces. Because of the role of the steering device, the driver simply than mechanical steering system is much smaller, steering torque of the steering wheel deflection. Advantages and disadvantages: high energy consumption, especially when slow turning, think the comparison engine driving direction also relatively easy. And because the hydraulic pump pressure, is also easier to damage to the power system.(2) electric power steering system, referred to as EPS or EPS (electric, Electronic Power Steering system) in mechanical steering mechanism, increase signal sensor, electronic control unit and the Steering Body. EPS is the use of electric motor as a power source, depending on the speed of help and steering parameters, and other factors, by the electronic control unit to complete the power-assisted control, its principles can be summarized as follows: when handling and steering wheel, mounted on the steering wheel shaft torque sensor constantly measured steering shaft torque signal, the signal and the vehicle speed signal input to the electronic control unit. The electronic control unit according to the input signal, determine power torque in magnitude and direction, which is the selected motor currents and rotation direction, adjusting the size of the auxiliary power steering. Motor torque by electromagnetic clutch by gear reducer by moments later, the car's steering mechanism, to achieve a vehicle condition of steering forces. For example, Fox's EHPAS e hydraulic system from a computer according to engine speed and vehicle speed and steering angle and other signal, drive e pump to deliver power steering system. Power feel very natural. So many people on Fox in the direction of the feeling is quite good, feeling of steering control can be as long as you want. Some vehicles also claims the use of electronic power, but just motor power, no hydraulic aided, prone to noise. Power effects are far behind Fox this type of electronic power.转向系统汽车转向系统:汽车上用来改变或恢复其行驶方向的专设机构称为汽车转向系统。
Turning characteristics of multi-axle vehiclesAbstract:This paper presents a mathematical model for multi-axle vehicles operating on level ground. Considering possible factors related to turning motion such as vehicle configuration and tire slip velocities, equations of motion were constructed to predict steer ability and driving decency of such vehicles. Turning radius, slip angle at the mass center, and each wheel velocity were obtained by numerically solving the equations with steering angles and average wheel velocity as numerical inputs. To elucidate the turning characteristics faulty-axle vehicles, the eject of fundamental parameters such as vehicle speed, steering angles and type of driving system were examined for a sample of multi-axle vehicles. Additionally, field tests using full-scale vehicles were carried out to evaluate the basic turning char-ataractics on level ground.Keywords: Multi-axle vehicles; Turning maneuverability; Mathematical model1. IntroductionTrack laying running gear has been mainly used in the fields of military and construction for heavy vehicle applications. Recently, running gear with pneumatic tires has been expanding to heavy vehicles in such fields, since tire equipped vehicles excel in speed, silence and energy e?-cogency. Several papers have been published on the subject of tractability and maneuverability of multi-axle vehicles [1,2]. A theoretical study to evaluate the turning motion of skid steering vehicles was also developed by Renoir and Cravat [3]. More recent army vehicles, such as the MODIX, are designed to be equipped with independent wheel drive and steering, and load control suspensions [4]. The MODIX can turn by normal steering, skid steering, or a mixture of both. Additionally, the conversion from mechanical drive to an electric drive unit controlled by each in-hub motor has been examined [5–7]. A hybrid wheel steer system is being developed to complement the independent drive capability of the in-hub wheel motors. However, there has not been a paper or technical publication dealing with the subject comprehensively and in a logical sequence because the phenomenon of dynamic motions of the multi-axle vehicle is complex.This paper describes a computer simulation model to predict turning characteristics of multi-axle vehicles. The equations of motion for the vehicles are constructed for level ground. Tractate and side forces acting under pneumatic tires due to interaction with the ground are of fundamental importance to predict the motion of vehicles. In the numerical simulation, the brushmodel based on a physical approach was adopted for the tire model [8]. The brush model is anidealized representation of tires in the region of contact.In order to determine the turning motion of multi-axle vehicles, the ejects of fundamental parameters such as vehicle speed, steering angles and type of driving system are examined by using specification of an example vehicle. Field tests on multi-axle vehicles were also conducted and compared to the predicted results with the data numerically obtained by the model. The results demonstrated that the proposed mathematical model could accurately assess the turning characteristics of multi-axle vehicles.2. Mathematical model of multi-axle vehicles2.1. Coordinate system and kinematics of the vehicleFig. 1 shows coordinate systems used to describe a multi-axle vehicle with velocity vector V and yaw angular velocity h at the mass center. The coordinate system (X1, X2) is fixed on the level ground with unit base vectors {E1, E2}. A moving coordinate system (x1, x2) is attached to the vehicle, whose origin is located at the mass center, with unit base vectors {e1, e2}.2.2. Equations of motionNewton’s second law applied to the vehicle yields:where m and I are the mass and the moment of inertia for the vehicle, respectively. The frictional force Q is defined under the itch wheel, and x i denotes the position vector of the itch wheel. In a steady state turn, the equilibrium equations for the vehicle are obtained by setting Vand zero.2.3. Tire slip and frictional forcesModeling of shear force generation for pneumatic tires has been reviewed by Pacifica and Sharp [8] who covers physical and empirical models. The brush model, an analytical model physically derived, has been widely used for vehicle dynamics studies. The relation between deformations of tire treads and shear forces, i.e., side force and tractate force, is simplified and the model idealizes the representation of tires in the region of contact. The horizontal shear forcesacting under the tire due to interaction with the ground are assumed to be linearly dependent on the tread displacement from the tread base.In this paper, the brush model has been adopted to the vehicle model. A schematic slip motion of a tire with slip angle is shown in Fig. 2. The slip velocity vector V i S is defined by the relative velocity of tread surface and the ground as follows:Where V i and V i R denote the traveling velocity vector and the peripheral speed vector, respectively, of the itch wheel. A non-dimensional slip ratio S is defined by the ratio of the norm of slip velocity with the magnitude of the peripheral velocity:Frictional force yields at the limit of the adhesion and the coincident of yielding friction is expressed as a function of slip ratio as follows:where K is a positive constant dependent on the staidness of the tire, and l0 is the maximum coincident of friction. The limit of slip ratio S m represents the full sliding state of the tire throughout the tread, expressed by S m =1/K.Fig. 4 shows the lateral force versus the longitudinal force (braking or traction force) plotted at given values of slip angles (rod) for a tire with the property of K= 5.0.As the driving power from the engine is transmitted to the wheel through the deferential, the driving force and the rotational speed of each wheel are influenced by power train types. The general type of driving system for multivalve vehicles is illustrated in Fig. 5. Deferential aremounted in each axle to distribute equal tractate force to both side wheels and the rotational speeds of the wheels depend on the path length of the tires. The property of differential is mathematically expressed as constraint equations:where Q l i is the tractate force or the longitudinal shear force on the ith tire, and V R0 is the average peripheral velocity of the tires.3. Experimental evaluationField tests were conducted by using two full-scale vehicles. The low speed turning performance of the vehicles was evaluated on a concrete test ground and on sandy ground. One vehicle was an eight-wheel-vehicle with front-four-wheel-steering, which is identified by vehicle A. The other was a TADANO ALL TERRAIN VEHICLE or vehicle B, which is an eight-wheel-vehicle with all-wheel-steering shown in Fig. 6. The maximum coincident of friction l0 depends on the ground condition. The coercions were measured in the field and l0 =0.6 was obtained with vehicle B on the concrete ground and l0 = 0.8 with vehicle A on the sandy ground. In the field tests, two steering types were examined. One was steering by the front four wheels, and the other by all the wheels.Fig. 7 shows the experimental and predicted results of the turning radius versus steering angles. The parameter indicates the average steering angle of the front wheels and, for all-wheel steering; the angles of the rear four wheels are fixed at a maximum in its steering capability. It is clear that the turning radii of the vehicles A and B decrease as the steering angles increase. Theδlower line for vehicle B indicates the results of all-wheel steering with rear steering angles, 3δ=23.0°, 7δ=14.3°, 8δ=25.0°. From Fig. 7 it can be seen that the turning =13.7°, 4radius has been substantially decreased by making use of all the wheels for steering.4. Numerical simulation and results4.1. Vehicle response in four wheel steeringIn order to evaluate the turning characteristics of multivalve vehicles, the numerical simulation was carried out using the specifications of a full-scale vehicle. The mass is m =24,500 kg and the mass center is located at the geometric center. The determination of steering angle of each wheel is shown in Fig. 8 for the case of the first and second axle wheels being steered (4WS: four-wheel steering). Each wheel steering angle d can be obtained geometrically such that all wheels have a steering center C on the middle line between the third and the fourth axles, in a similar way to the Ackerman angle determination. In this simulation, it is assumed that there is an imaginary wheel in the middle of the two wheels on the first axle and the angle of the imaginary wheel d is used to represent the average angle of the front wheels. Fig. 9 shows the steering angles versus time used in the simulations. The vehicle model starts at the origin and accelerates in two seconds up to wheel velocity V R0 = 1.4m/s, (in Figs.9 and 10 the time axis begins at this point) then after 0.5s of straight motion, the vehicle begins steering up to the maximum steering angle δ=10.Additionally, the lateral force on the third axle is much larger than the forces on the first and second axles. It was found from the numerical results that the sideslip angle of the third axle tires is large and opposite in direction compared to the other tires.4.2. Effect of rear wheel steering on turning characteristicsThe turning radius of vehicles at low speed is expected to decrease if the rear wheels are steered with opposite angles to the front wheels. Fig. 13 shows the steering radius when the tires on the third and fourth axles are inversely steered to the front wheels. The average steering angle δis defined as the angle of an imaginary wheel in the middle of the wheels of the rear wheelsron the fourth axle as shown in Fig. 13.δat l =1.0m is illustrated in Fig.The change in turning radius versus rear steering anglesr14 for the front steering angles, d =10,20 and 30. It is clear that the turning radius decreases considerably as the rear steering angle increases. In the design of multi-axle vehicles the steer centers of the front wheels do not generally coincide with the center of the rear wheels, as seen previously.作者:K. Watanabe,J. Yamakawa , M. Tanaka, T. Sasaki国籍:American出处:The National Defense Academy, 1-10-20 Hashirimizu, Yokosuka 239-8686, JapanAvailable online 29 March 2006多轴车辆的转向特性摘要:本文为平地上操作多轴车辆的数学模型,考虑有关的可能因素构建转向车辆配置和轮胎滑移速度,如运动预测的可操作性和这些车辆的驾驶效率。
汽车转向系统的历史汽车转向系统在车辆系统中是最基础的系统,驾驶员通过方向盘操纵和控制汽车的行驶方向,从而实现了他的行驶意图。
100多年里,汽车行业中机械和电子技术的发展。
如今,汽车已经不是纯粹的机械,它是机械、电子和其他材料等的综合产品。
汽车产业的转向系统的发展,经过了漫长的变革。
传统的转向系统是机械转向系统,汽车的方向盘通过试点,通过这样一系列的机械零件使方向盘实现偏转,从而实现转向的控制。
由于在20世纪50年代,液压助力转向系统在汽车上的应用,标志着转向系统又进入一个新的开始。
汽车转向系统的动力源从人力转变为液压助力转向。
转向系统增加了液压助力器,高压钠灯(液压助力转向)是基于机械和液压系统。
液压系统和发动机,发动机开始时一部分是汽车发动机的功率,另一部分的功率是液压系统的动能。
由于其工作可靠,成熟的技术已被广泛使用。
转向系统的主要特点是流体的压力,减少驾驶员在方向盘的支持,提高了转向灯和自动运行的稳定性。
但同时,也有一些液压动力系统的缺陷。
针对汽车设计和制造,完成后的车辆转向动态特性无法改变。
其直接后果是,在低功率时汽车的部分的动力特性可以得到很好的发挥,但在高速期间有良好的方式来检测,因为是不可调整的动力特性,没有更好的方式驱动,当动力学特征高功率时,而不是非常善于低段的效果好。
如果没有看准车辆的液压系统,还必须是发动机驱动。
因此,能源消耗提高燃油发动机,现有的液压油泄漏问题不仅污染环境,容易到其他组件,针对气温低,液压系统的性能较差。
近年来,随着电子技术的广泛应用,转向系统也越来越多地使用电子设备。
变成电子控制系统,因此,相应的出现了电动助力转向系统。
电液动力转向可以分为两大类:电动液压转向系统(电液压动力 - EHPS)和电动液压转向,电控ECHPS转向(液压助力转向)。
电动液压助力转向系统是在液压系统的液压助力系统的发展的基础上,不同的是,在液压系统动力源的电动液压动力系统,但不是由汽车发动机电机驱动液压系统,节约能源和减少发动机的燃料消耗。
附录附录ASteering Behavior and Control Technology0f Four—wheel Steering AutomobiIeABSTRACTThis paper analyses the characteristics of car four-wheel steering control to, summarizes the principle of construction four-wheel steering cars. Introduced the four-wheel steering system control strategy. Points out the four-wheel steering system control technology faces difficulties, and prospects the trend of its development.Keywords: four-wheel steering; Steering characteristics; Working principle; Control; Development;1. IntroductionWith modern road traffic system and the development of modern automobile technology, people on the car's steering control performance and driving stability requirement is increasing day by day. As the most effective improve vehicle handling performance of a kind of active chassis control technology - four-wheel steering technology. In the 1980s began in cars get application, and as the modern automobile industry and continuous development. Car four-wheel steering means in turn, the rear car can be relative to body active steering, that the car can be up to four wheels role. To improve the car turned to maneuverability, handling stability and driving safety.2. The car's steering four-wheel steering2.1 4ws cars and 2ws steering process analysisOrdinary two wheel steering can not only the front car around its own wheel rotation and relative to body deflection around the precision, then wheel rotation and not only deflection. When the driver turned the steering wheel, front wheel steering, changed directions face front tyre, produced a transverse force, through the front wheel effect on body, make the body yawing and produce centrifugal force, the rear wheels cornering,produced change direction, participate in the sports car to. And the rear and front car 4ws as, can rotation can also deflection. When the driver turned the steering wheel, front and rear wheels, that car almost at the same time to change direction, realize steering movement.In turn, the 2ws car before active steering wheel rotation just makes passive steering. Obviously, 2ws cars in steering process from the steering wheel rotation to rear wheel steering movement in between the existence of certain lag time. This phase lag 2ws automobile steering characteristics make the servo sex becomes poor, and that the car steering radius increased. In addition, 2ws car at a high speed, the steering wheel Angle relative to certain incremental, body yaw-rate and lateral acceleration incremental increases, made the car at a high speed handling and stability becomes poor. And in turn, the car 4ws has done before, rear wheel steering, active in the process of steering, high sensitivity, fast response, effectively overcome the shortcomings.2.2 4ws automobile steering wayAccording to the theory analysis and road test showed that a four-wheel steering can improve the maneuverability and steering control stability of high speed, modern 4ws car is developed according to the guiding ideology. Generally speaking, in the process of steering cars in 4ws, according to different driving conditions, front and rear wheel steering Angle should follow certain rules between. At present, the front, rear typical 4ws deflection rules generally are described below:(a) inverse phase steeringAs shown in figure A1 (a) shows, steering wheel Angle at low speeds or larger, front and rear inverse phase shift, realize that the rear wheels with the front deflect deflect instead, and with the steering wheel Angle deflection Angle increases and increases in a certain range. This redirection speed way can improve the manipulation of the car, reduce automobile portability turning radius, making cars maneuverability. Easy car turned turn, obstacle avoidance and driving, garage and parking. As for cars, if rear inverse phase 5 °, then turned can reduce minimum steering radius was about 0.5.(b) phase with steeringAs shown in figure A1 (b) shows, in a high-speed or steering wheel Angle is lesser, front and rear wheels with phase shift, realize that the rear wheels deflect the deflection direction with front wheel. Make the car body yaw-rate greatly reduce automobile body, can reduce the tendency of cornering undergo dynamic, guarantee the overtaking the highway, elevated highway, in and out, in the approach and flyovers insufficient steering state. Now, there are many 4ws cars take improving vehicle handling performance focuses on making cars on high-speed steering stability, without excessive demands in low-speed driving car course-altering maneuvers flexibility. The features is low by front wheel steering car only when only in car speeds, after up to a certain value, rear, only participate in steering phasewith four-wheel steering.(a)Reverse a steering (b)Coincidental a steeringFigure A1 four-wheel steering the front of the car, rear deflection rule3. Four-wheel steering car components and working characteristics4ws car is in front wheel steering system, and on the basis of suspension in cars on install a set of rear wheel steering system, both through certain questions of contact, making cars in front wheel steering also participate in the meanwhile, rear wheel steering. After decades of research and development, have molding 4ws car type has a variety of, composition, structure is different, working principle and control methods vary. The typical electric 4ws system mainly by the front wheel steering system, sensors, ECU, rear wheel steering actuators and rear wheel steering transmission mechanism etc. the sensor will front wheel steering motor sports the signal and the signal into ECU were analyzed and calculated, will process after the drive signal to rear wheel steering actuators, rear wheel steering actuators action, through the rear wheel steering transmission mechanism, rear wheel deflection. Meanwhile, ECU when carried out monitoring car operation condition, calculate target steering Angle and rear real-time steering Angle, the difference in value between real-time adjustment to rear wheels corner. Such, can according to the actual sports car, to realize the state car four-wheel steering. General 4ws cars equipped with two turning mode, can enter 4ws state, also can keep the traditional 2ws state, drivers can pass the driving indoor steering mode switch selection. When 4ws car in the course of driving the electronic control system malfunction, rear wheel automatic back into the middle, the automatic into the front wheel steering state, ensure like ordinary front wheel steering car driving safely as automobiles. Meanwhile, dashboard "4ws" indicator, warning drivers, stored on ECU fault condition of warranty, so that by yards.4. Four-wheel steering control of the car4ws system not only to realize the need for automotive steering movement, and guarantee the vehicle steering traveling stability. At present, in the research and development of automobile 4ws centered on improving car, the transient manipulation stability as a starting point, explore due to rear brought car in response to changes, andadopts various rear wheel control strategy and produce different effect. Auto four-wheel steering control depends on tires were lateral force, four-wheel steering can make cars in turn, the rear directly involved in for car yawing movement and lateralizing control. Through timely, accurate control of the rear wheel steering Angle, not only can shorten the process of steering the transient response, and can actively control cars the trajectory and attitude. In turn, that the car during its longitudinal direction centerline of the direction, even with the direction of the car horn decreases overlap, attitude Angle of steering bodywork cornering, improves the lateral stability car.4.1 control goalsThat car in turn to basic keep PianJiao zero gravity side car. So can greatly improve the car to the steering wheel input dynamic response characteristics, largely improved yaw-rate and lateral acceleration of transient performance indicators, lower the body posture change. From the PianJiao zero target start. According to certain control program is to realize the rear wheels to function is derived based four-wheel steering. Of course, the modern 4ws cars also have some other control goal request.4.2 control strategy model basedThe general situation of the studies are 4ws system based on a simple dof vehicle model of linear. This is just a kind of utopian mathematical model, when modeling overlooked in some of the dynamic parameters of the car without considering changes, automobile driving produces in the process of many of the random uncertainties and not very accurate. Early 4ws controller design are based on linear dynamic equation with the hypothesis, but due to the above reasons, make the design of control system doesn't meet practical needs, there is no guarantee that the vehicle steering control stability.4.3 control methodDifferent cars driving performance requirements of steering and different models of the car wheels deflection 4ws law is not the same. Thus, different 4ws vehicle USES control method is endless and same, various control method has its emphases respectively. At present, in some molding 4ws with car on the control method basically has:(a). The set than simply steering system 4ws.(b). Than before, rear wheel steering front-wheel corner function 4ws system.(c).Than before, rear wheel steering j speed function 4ws system is.(d). The 4ws with first-order lagging system.(e).With reversed-phase characteristics 4ws system(f). With optimal control characteristics of 4ws system.(g). Has since learning, white the ability to adjust the 4ws system.Former five kinds of control system belong to classical control theory category, only to satisfy car under certain conditions, but also can't adapt to the need of motor sports ofrandom changes, along with the computer technology and some advanced control theory of development, 4ws system will towards adaptive, intelligent direction.4.4 4ws system control technology developmentAt present, for research and development of car 4ws remains constant developing and perfecting stage. Although researchers from structure to control principle of four-wheel steering on have done a lot of research, 4ws technology have made many progress. But, in the use of modern control theory of automotive steering control strategy choice of methods of determination and control, mainly depend on experience, the corresponding theoretical basis is still very lack, 4ws technology not really into wide use in commercial car on stage, no widely used.In the technology in relatively mature 4ws cars, most use electric hydraulic power 4ws system. With the rapid development of electronic technology, computer technology in cars, the wide application of electronic electric 4ws system will be the trend of the development of automobile 4ws. Although in 4ws system research and development has made great development, however, as the core technical problems 4ws system - 4ws system controller design, what on earth as the best control objectives? Adopt what kind of control method? Still no in this field is the same view. Already, early before of the 4ws and the system based on a simple dof vehicle model, linear controller design are based on 4ws with linear dynamic equation hypothesis, PID control strategy. We know, 4ws system control mainly dependent on tires were transverse force. Early studies is the automobile tires as linear model, general 4ws control is based on the transverse force by tire wheel in proportion to the side PianJiao assumptions, this assumption just in the lateral acceleration smaller range effective. When in the lateral acceleration larger range, tire cornering characteristics of nonlinear area, will go to one side of the PianJiao tyres by transverse force in the response of the relationship of scale, and no longer the longitudinal force by tire vertical load, etc, have relations. In fact, car in turning down the street, tire basically all work in nonlinear area. At this time, garnish with linear control theory for research, appear reluctant to. 4ws vehicle handling dynamics problems is very complicated nonlinear multibody dynamics problems of the control system for 4ws research should be taken into account in the sports car, in-depth study of affecting its state response, establish simulation kinetic parameters of actual sports car mathematical model, adopt more effective control strategy. With the continuous development of control technology, some advanced modern control method has been applied in 4ws system control study, as optimal control and adaptive control, sliding mode control, robust control etc, in recent years, appeared again fuzzy control, based on artificial neural network theory, control method, etc. The study of 4ws control system from linear field gradually transition to nonlinear fields, some multi-degree-of-freedom car dynamics models have proposed 4ws, but mostly in infancy, is not mature. The future of thedevelopment of the system is studied 4ws trend for mainly concentrated :(a). Further research and development of new rear wheel steering actuators and rear wheel steering transmission mechanism, improve the manipulation of steering portability, flexibility and steering Angle of accuracy.(b). For 4ws system, further development, design high performance, high precision, high sensitivity sensor, in order to correctly detection car sports signal.(c). Deep study turning the tyre during transient characteristics as the main factors, to join in the mathematic model of the system 4ws.(d). The control theory and control into method is applied to the 4ws controller study.附录B四轮转向汽车的转向特性及控制技术摘要本文分析比较了四轮转向汽车的转向特点,概述了电控四轮转向汽车的结构原理。

附录附录A 英文文献Along with automobile electronic technology swift and violent development, the people also day by day enhance to the motor turning handling quality request. The motor turning system changed, the hydraulic pressure boost from the traditional machinery changes (Hydraulic Power Steering, is called HPS), the electrically controlled hydraulic pressure boost changes (Elect ric Hydraulic Power Steering, is called EHPS), develops the electrically operated boost steering system (Elect ric Power Steering, is called EPS), finally also will transit to the line controls the steering system (Steer By Wire, will be called SBW).The machinery steering system is refers by pilot's physical strength achievement changes the energy, in which all power transmission all is mechanical, the automobile changes the movement is operates the steering wheel by the pilot, transmits through the diverter and a series of members changes the wheel to realize. The mechanical steering system by changes the control mechanism, the diverter and major part changes the gearing 3 to be composed.Usually may divide into according to the mechanical diverter form: The gear rack type, follows round the world -like, the worm bearing adjuster hoop type, the worm bearing adjuster refers sells the type. Is the gear rack type andfollows using the broadest two kinds round the world -like (uses in needing time big steering force).In follows round the world -like in the diverter, the input changes the circle and the output steering arm pivot angle is proportional; In the gear rack type diverter, the input changes the turn and the output rack displacement is proportional. Follows round the world -like the diverter because is the rolling friction form, thus the transmission efficiency is very high, the ease of operation also the service life are long, moreover bearing capacity, therefore widely applies on the truck. The gear rack type diverter with follows round the world -like compares, the most major characteristic is the rigidity is big, the structure compact weight is light, also the cost is low. Because this way passes on easily by the wheel the reacting force to the steering wheel, therefore has to the pavement behavior response keen merit, but simultaneously also easy to have phenomena and so on goon and oscillation, also its load bearing efficiency relative weak, therefore mainly applies on the compact car and the pickup truck, at present the majority of low end passenger vehicle uses is the gear rack type machinery steering system.Along with the vehicles carrying capacity increase as well as the people to the vehicles handling quality request enhancement, the simple mechanical type steering system were already unable to meet the needs, the power steering system arise at the historic moment, it could rotate the steering wheel while the pilot to provide the boost, the power steering system divides into the hydraulic pressure steering system and the electrically operated steering system 2kinds.Hydraulic pressure steering system is at present uses the most widespread steering system.The hydraulic pressure steering system increased the hydraulic system in the mechanical system foundation, including hydraulic pump, V shape band pulley, drill tubing, feed installment, boost installment and control valve. It with the aid of in the motor car engine power actuation hydraulic pump, the air compressor and the generator and so on, by the fluid strength, the physical strength or the electric power increases the pilot to operate the strength which the front wheel changes, enables the pilot to be possible nimbly to operate motor turning facilely, reduced the labor intensity, enhanced the travel security.The hydraulic pressure boost steering system from invented already had about half century history to the present, might say was one kind of more perfect system, because its work reliable, the technology mature still widely is applied until now. It takes the power supply by the hydraulic pump, after oil pipe-line control valves to power hydraulic cylinder feed, through the connecting rod impetus rotation gear movement, may changes the boost through the change cylinder bore and the flowing tubing head pressure size the size, from this achieved changes the boost the function. The traditional hydraulic pressure type power steering system may divide into generally according to the liquid flow form: Ordinary flow type and atmosphericpressure type 2 kind of types, also may divide into according to the control valve form transfers the valve type and the slide-valve type.Along with hydraulic pressure power steering system on automobile daily popularization, the people to operates when the portability and the road feeling request also day by day enhance, however the hydraulic pressure power steering system has many shortcomings actually: ①Because its itself structure had decided it is unable to guarantee vehicles rotates the steering wheel when any operating mode, all has the ideal operation stability, namely is unable simultaneously to guarantee time the low speed changes the portability and the high speed time operation stability;②The automobile changes the characteristic to drive the pilot technical the influence to be serious; ③The steering ratio is fixed, causes the motor turning response characteristic along with changes and so on vehicle speed, transverse acceleration to change, the pilot must aim at the motor turning characteristic peak-to-peak value and the phase change ahead of time carries on certain operation compensation, thus controls the automobile according to its wish travel. Like this increased pilot's operation burden, also causes in the motor turning travel not to have the security hidden danger; But hereafter appeared the electrically controlled hydraulic booster system, it increases the velocity generator in the traditional hydraulic pressure power steering system foundation, enables the automobile along with the vehicle speed change automatic control force size, has to a certain extent relaxed the traditional hydraulic pressure steering system existence question.At present our country produces on the commercial vehicle and the passenger vehicle uses mostly is the electrically controlled hydraulic pressure boost steering system, it is quite mature and the application widespread steering system. Although the electrically controlled hydraulic servo alleviated the traditional hydraulic pressure from certain degree to change between the portability and the road feeling contradiction, however it did not have fundamentally to solve the HPS system existence insufficiency, along with automobile microelectronic technology development, automobile fuel oil energy conservation request as well as global initiative environmental protection, it in aspect and so on arrangement, installment, leak-proof quality, control sensitivity, energy consumption, attrition and noise insufficiencies already more and more obvious, the steering system turned towards the electrically operated boost steering system development.The electrically operated boost steering system is the present motor turning system development direction, its principle of work is: EPS system ECU after comes from the steering wheel torque sensor and the vehicle speed sensor signal carries on analysis processing, controls the electrical machinery to have the suitable boost torque, assists the pilot to complete changes the operation. In the last few years, along with the electronic technology development, reduces EPS the cost to become large scale possibly, Japan sends the car company, Mitsubishi Car company, this field car company, US's Delphi automobile system company, TRW Corporation and Germany's ZFCorporation greatly all one after another develops EPS.Mercedes2Benz and Siemens Automotive two big companies invested 65,000,000 pounds to use in developing EPS, the goal are together load a car to 2002, yearly produce 300 ten thousand sets, became the global EPS manufacturer. So far, the EPS system in the slight passenger vehicle, on the theater box type vehicle obtains the widespread application, and every year by three million speed development.Steering is the term applied to the collection of components, linkages, etc. which allow for a vessel (ship, boat) or vehicle (car) to follow the desired course. An exception is the case of rail transport by which rail tracks combined together with railroad switches provide the steering function.The most conventional steering arrangement is to turn the front wheels using a hand–operated steering wheel which is positioned in front of the driver, via the steering column, which may contain universal joints to allow it to deviate somewhat from a straight line. Other arrangements are sometimes found on different types of vehicles, for example, a tiller or rear–wheel steering. Tracked vehicles such as tanks usually employ differential steering —that is, the tracks are made to move at different speeds or even in opposite directions to bring about a change of course.Many modern cars use rack and pinion steering mechanisms, where the steering wheel turns the pinion gear; the pinion moves the rack, which is a sort of linear gear which meshes with the pinion, from side to side. This motionapplies steering torque to the kingpins of the steered wheels via tie rods and a short lever arm called the steering arm.Older designs often use the recirculating ball mechanism, which is still found on trucks and utility vehicles. This is a variation on the older worm and sector design; the steering column turns a large screw (the "worm gear") which meshes with a sector of a gear, causing it to rotate about its axis as the worm gear is turned; an arm attached to the axis of the sector moves the pitman arm, which is connected to the steering linkage and thus steers the wheels. The recirculating ball version of this apparatus reduces the considerable friction by placing large ball bearings between the teeth of the worm and those of the screw; at either end of the apparatus the balls exit from between the two pieces into a channel internal to the box which connects them with the other end of the apparatus, thus they are "recirculated".The rack and pinion design has the advantages of a large degree of feedback and direct steering "feel"; it also does not normally have any backlash, or slack. A disadvantage is that it is not adjustable, so that when it does wear and develop lash, the only cure is replacement.The recirculating ball mechanism has the advantage of a much greater mechanical advantage, so that it was found on larger, heavier vehicles while the rack and pinion was originally limited to smaller and lighter ones; due to the almost universal adoption of power steering, however, this is no longer an important advantage, leading to the increasing use of rack and pinion on newercars. The recirculating ball design also has a perceptible lash, or "dead spot" on center, where a minute turn of the steering wheel in either direction does not move the steering apparatus; this is easily adjustable via a screw on the end of the steering box to account for wear, but it cannot be entirely eliminated or the mechanism begins to wear very rapidly. This design is still in use in trucks and other large vehicles, where rapidity of steering and direct feel are less important than robustness, maintainability, and mechanical advantage. The much smaller degree of feedback with this design can also sometimes be an advantage; drivers of vehicles with rack and pinion steering can have their thumbs broken when a front wheel hits a bump, causing the steering wheel to kick to one side suddenly (leading to driving instructors telling students to keep their thumbs on the front of the steering wheel, rather than wrapping around the inside of the rim). This effect is even stronger with a heavy vehicle like a truck; recirculating ball steering prevents this degree of feedback, just as it prevents desirable feedback under normal circumstances.The steering linkage connecting the steering box and the wheels usually conforms to a variation of Ackermann steering geometry, to account for the fact that in a turn, the inner wheel is actually traveling a path of smaller radius than the outer wheel, so that the degree of toe suitable for driving in a straight path is not suitable for turns.As vehicles have become heavier and switched to front wheel drive, the effort to turn the steering wheel manually has increased - often to the pointwhere major physical exertion is required. To alleviate this, auto makers have developed power steering systems. There are two types of power steering systems—hydraulic and electric/electronic. There is also a hydraulic-electric hybrid system possible.A hydraulic power steering (HPS) uses hydraulic pressure supplied by an engine-driven pump to assist the motion of turning the steering wheel. Electric power steering (EPS) is more efficient than the hydraulic power steering, since the electric power steering motor only needs to provide assist when the steering wheel is turned, whereas the hydraulic pump must run constantly. In EPS the assist level is easily tunable to the vehicle type, road speed, and even driver preference. An added benefit is the elimination of environmental hazard posed by leakage and disposal of hydraulic power steering fluid.An outgrowth of power steering is speed adjustable steering, where the steering is heavily assisted at low speed and lightly assisted at high speed. The auto makers perceive that motorists might need to make large steering inputs while manoeuvering for parking, but not while traveling at high speed. The first vehicle with this feature was the Citroën SM with its Diravi layout, although rather than altering the amount of assistance as in modern power steering systems, it altered the pressure on a centring cam which made the steering wheel try to "spring" back to the straight-ahead position. Modern speed-adjustable power steering systems reduce the pressure fed to the ram asthe speed increases, giving a more direct feel. This feature is gradually becoming commonplace across all new vehicles.Four-wheel steering (or all wheel steering) is a system employed by some vehicles to increase vehicle stability while maneuvering at high speed, or to decrease turning radius at low speed.In most four-wheel steering systems, the rear wheels are steered by a computer and actuators. The rear wheels generally cannot turn as far as the Alternatively, several systems, including Delphi's Quadrasteer and the system in Honda's Prelude line, allow for the rear wheels to be steered in the opposite direction as the front wheels during low speeds. This allows the vehicle to turn in a significantly smaller radius —sometimes critical for large trucks or vehicles with trailers.附录B 文献翻译随着汽车电子技术的迅猛发展,人们对汽车转向操纵性能的要求也日益提高。

汽车转向控制中英文对照外文翻译文献(文档含英文原文和中文翻译)中英文对照翻译汽车的转向控制控制系统稳定性是针对提高驾驶安全性提出的一系列措施中最新的一个。
这个系统能够在40毫秒内实现从制动开始到制动恢复的过程,这个时间是人的反应时间得七倍。
他们通过调整汽车扭矩或者通过应用汽车左侧或右侧制动,如果需要甚至两者兼用,来实现准确的行车路线。
这个系统已被应用于奔驰S600汽车了。
稳定的机械自动系统能够在制动时发现肇端,并且在驾驶人员发现能够反应以前实现车辆的减速。
安全玻璃,安全带,撞击缓冲区,安全气囊,ABS系统,牵引力控制系统还有现在的稳定调节系统。
汽车安全系统的连续升级,已经产生了一种为保护汽车所有者安全的设计模式。
稳定调节系统帮助驾驶员从不可控制的曲线制动中解脱出来,从而避免了汽车的摆动滑行和交通事故。
利用计算机和一系列传感器,稳定调节系统能够检测到制动轮的打滑并且比人更快的恢复对汽车的方向控制。
系统每百万分之一秒作出一次快速捕捉,以及断断汽车是否在按照驾驶员的路线行驶。
如果检测到汽车行驶路线和驾驶员驾驶路线存在一个微小的偏差,系统会在瞬间纠正发动机扭矩或者应用汽车左右制动。
过程的标准反应时间是40毫秒----人的平均反应时间的七分之一。
罗伯特博世工程系统负责人安东·范·桑特解释说:“一个稳定的控制系统能够‘感觉到”驾驶员想要运动的方向,通过控制转向角度,油门踏板的位置,制动板的状态来确定汽车实际运动路线的偏航比率(汽车偏离方向轴的角度)和横向加速度”。
项目负责人阿明·马勒领导着范桑特的工作小组和奔驰汽车公司的工程师发明了第一个完全有效的稳定调节系统,该系统由发动机扭矩控制系统,制动系统,牵引控制系统组成以实现理想与现实运动之间的最小差距。
汽车安全专家相信稳定调节系统能够减少交通事故的发生,至少是在伤亡严重的事故方面。
安全统计表明,多数的单车撞击事故伤亡(占伤亡事故发生的4%),事故能够通过应用这项新技术避免。
机械专业英语词汇中英文对照翻译一览表陶瓷ceramics合成纤维synthetic fibre电化学腐蚀electrochemical corrosion车架automotive chassis悬架suspension转向器redirector变速器speed changer板料冲压sheet metal parts孔加工spot facing machining车间workshop工程技术人员engineer气动夹紧pneuma lock数学模型mathematical model画法几何descriptive geometry机械制图Mechanical drawing投影projection视图view剖视图profile chart标准件standard component零件图part drawing装配图assembly drawing尺寸标注size marking技术要求technical requirements刚度rigidity内力internal force位移displacement截面section疲劳极限fatigue limit断裂fracture塑性变形plastic distortion脆性材料brittleness material刚度准则rigidity criterion垫圈washer垫片spacer直齿圆柱齿轮straight toothed spur gear 斜齿圆柱齿轮helical-spur gear直齿锥齿轮straight bevel gear运动简图kinematic sketch齿轮齿条pinion and rack蜗杆蜗轮worm and worm gear虚约束passive constraint曲柄crank摇杆racker凸轮cams共轭曲线conjugate curve范成法generation method定义域definitional domain值域range导数\\微分differential coefficient求导derivation定积分definite integral不定积分indefinite integral曲率curvature偏微分partial differential毛坯rough游标卡尺slide caliper千分尺micrometer calipers攻丝tap二阶行列式second order determinant 逆矩阵inverse matrix线性方程组linear equations概率probability随机变量random variable排列组合permutation and combination 气体状态方程equation of state of gas动能kinetic energy势能potential energy机械能守恒conservation of mechanical energy动量momentum桁架truss轴线axes余子式cofactor逻辑电路logic circuit触发器flip-flop脉冲波形pulse shape数模digital analogy液压传动机构fluid drive mechanism机械零件mechanical parts淬火冷却quench淬火hardening回火tempering调质hardening and tempering磨粒abrasive grain结合剂bonding agent砂轮grinding wheel后角clearance angle龙门刨削planing主轴spindle主轴箱headstock卡盘chuck加工中心machining center 车刀lathe tool车床lathe钻削镗削bore车削turning磨床grinder基准benchmark钳工locksmith锻forge压模stamping焊weld拉床broaching machine拉孔broaching装配assembling铸造found流体动力学fluid dynamics流体力学fluid mechanics加工machining液压hydraulic pressure切线tangent机电一体化mechanotronics mechanical-electrical integration气压air pressure pneumatic pressure稳定性stability介质medium液压驱动泵fluid clutch液压泵hydraulic pump阀门valve失效invalidation强度intensity载荷load应力stress安全系数safty factor可靠性reliability螺纹thread螺旋helix键spline销pin滚动轴承rolling bearing滑动轴承sliding bearing弹簧spring制动器arrester brake十字结联轴节crosshead联轴器coupling链chain皮带strap精加工finish machining粗加工rough machining变速箱体gearbox casing腐蚀rust氧化oxidation磨损wear耐用度durability随机信号random signal离散信号discrete signal超声传感器ultrasonic sensor 集成电路integrate circuit挡板orifice plate残余应力residual stress套筒sleeve扭力torsion冷加工cold machining电动机electromotor汽缸cylinder过盈配合interference fit热加工hotwork摄像头CCD camera倒角rounding chamfer优化设计optimal design工业造型设计industrial moulding design有限元finite element滚齿hobbing插齿gear shaping伺服电机actuating motor铣床milling machine钻床drill machine镗床boring machine步进电机stepper motor丝杠screw rod导轨lead rail组件subassembly可编程序逻辑控制器Programmable Logic Controller PLC 电火花加工electric spark machining电火花线切割加工electrical discharge wire - cutting 相图phase diagram热处理heat treatment固态相变solid state phase changes有色金属nonferrous metal陶瓷ceramics合成纤维synthetic fibre电化学腐蚀electrochemical corrosion车架automotive chassis悬架suspension转向器redirector变速器speed changer板料冲压sheet metal parts孔加工spot facing machining车间workshop工程技术人员engineer气动夹紧pneuma lock数学模型mathematical model画法几何descriptive geometry机械制图Mechanical drawing投影projection视图view剖视图profile chart标准件standard component零件图part drawing装配图assembly drawing尺寸标注size marking技术要求technical requirements刚度rigidity内力internal force位移displacement截面section疲劳极限fatigue limit断裂fracture塑性变形plastic distortion脆性材料brittleness material刚度准则rigidity criterion垫圈washer垫片spacer直齿圆柱齿轮straight toothed spur gear 斜齿圆柱齿轮helical-spur gear直齿锥齿轮straight bevel gear运动简图kinematic sketch齿轮齿条pinion and rack蜗杆蜗轮worm and worm gear虚约束passive constraint曲柄crank摇杆racker凸轮cams共轭曲线conjugate curve范成法generation method定义域definitional domain值域range导数\\微分differential coefficient求导derivation定积分definite integral不定积分indefinite integral曲率curvature偏微分partial differential毛坯rough游标卡尺slide caliper千分尺micrometer calipers攻丝tap二阶行列式second order determinant 逆矩阵inverse matrix线性方程组linear equations概率probability随机变量random variable排列组合permutation and combination气体状态方程equation of state of gas动能kinetic energy势能potential energy机械能守恒conservation of mechanical energy 动量momentum桁架truss轴线axes余子式cofactor逻辑电路logic circuit触发器flip-flop脉冲波形pulse shape数模digital analogy液压传动机构fluid drive mechanism机械零件mechanical parts淬火冷却quench淬火hardening回火tempering调质hardening and tempering磨粒abrasive grain结合剂bonding agent砂轮grinding wheel Assembly line 组装线Layout 布置图Conveyer 流水线物料板Rivet table 拉钉机Rivet gun 拉钉枪Screw driver 起子Pneumatic screw driver 气动起子worktable 工作桌OOBA 开箱检查fit together 组装在一起fasten 锁紧(螺丝)fixture 夹具(治具)pallet 栈板barcode 条码barcode scanner 条码扫描器fuse together 熔合fuse machine热熔机repair修理operator作业员QC品管supervisor 课长ME 制造工程师MT 制造生技cosmetic inspect 外观检查inner parts inspect 内部检查thumb screw 大头螺丝lbs. inch 镑、英寸EMI gasket 导电条front plate 前板rear plate 后板chassis 基座bezel panel 面板power button 电源按键reset button 重置键Hi-pot test of SPS 高源高压测试Voltage switch of SPS 电源电压接拉键sheet metal parts 冲件plastic parts 塑胶件SOP 制造作业程序material check list 物料检查表work cell 工作间trolley 台车carton 纸箱sub-line 支线left fork 叉车personnel resource department 人力资源部production department生产部门planning department企划部QC Section品管科stamping factory冲压厂painting factory烤漆厂molding factory成型厂common equipment常用设备uncoiler and straightener整平机punching machine 冲床robot机械手hydraulic machine油压机lathe车床planer |plein|刨床miller铣床grinder磨床linear cutting线切割electrical sparkle电火花welder电焊机staker=reviting machine铆合机position职务president董事长general manager总经理special assistant manager特助factory director厂长department director部长deputy manager | =vice manager副理section supervisor课长deputy section supervisor =vice section superisor副课长group leader/supervisor组长line supervisor线长assistant manager助理to move, to carry, to handle搬运be put in storage入库pack packing包装to apply oil擦油to file burr 锉毛刺final inspection终检to connect material接料to reverse material 翻料wet station沾湿台Tiana天那水cleaning cloth抹布to load material上料to unload material卸料to return material/stock to退料scraped |\\'skr?pid|报废scrape ..v.刮;削deficient purchase来料不良manufacture procedure制程deficient manufacturing procedure制程不良oxidation |\\' ksi\\'dei?n|氧化scratch刮伤dents压痕defective upsiding down抽芽不良defective to staking铆合不良embedded lump镶块feeding is not in place送料不到位stamping-missing漏冲production capacity生产力education and training教育与训练proposal improvement提案改善spare parts=buffer备件forklift叉车trailer=long vehicle拖板车compound die合模die locker锁模器pressure plate=plate pinch压板bolt螺栓administration/general affairs dept总务部automatic screwdriver电动启子thickness gauge厚薄规gauge(or jig)治具power wire电源线buzzle蜂鸣器defective product label不良标签identifying sheet list标示单location地点present members出席人员subject主题conclusion结论decision items决议事项responsible department负责单位pre-fixed finishing date预定完成日approved by / checked by / prepared by核准/审核/承办PCE assembly production schedule sheet PCE组装厂生产排配表model机锺work order工令revision版次remark备注production control confirmation生产确认checked by初审approved by核准department部门stock age analysis sheet 库存货龄分析表on-hand inventory现有库存available material良品可使用obsolete material良品已呆滞to be inspected or reworked 待验或重工total合计cause description原因说明part number/ P/N 料号type形态item/group/class类别quality品质prepared by制表notes说明year-end physical inventory difference analysis sheet 年终盘点差异分析表physical inventory盘点数量physical count quantity帐面数量difference quantity差异量cause analysis原因分析raw materials原料materials物料finished product成品semi-finished product半成品packing materials包材good product/accepted goods/ accepted parts/good parts 良品defective product/non-good parts不良品disposed goods处理品warehouse/hub仓库on way location在途仓oversea location海外仓spare parts physical inventory list备品盘点清单spare molds location模具备品仓skid/pallet栈板tox machine自铆机wire EDM线割EDM放电机coil stock卷料sheet stock片料tolerance工差score=groove压线cam block滑块pilot导正筒trim剪外边pierce剪内边drag form压锻差pocket for the punch head挂钩槽slug hole废料孔feature die公母模expansion dwg展开图radius半径shim(wedge)楔子torch-flame cut火焰切割set screw止付螺丝form block折刀stop pin定位销round pierce punch=die button圆冲子shape punch=die insert异形子stock locater block定位块under cut=scrap chopper清角active plate活动板baffle plate挡块cover plate盖板male die公模female die母模groove punch压线冲子air-cushion eject-rod气垫顶杆spring-box eject-plate弹簧箱顶板bushing block衬套insert 入块club car高尔夫球车capability能力parameter参数factor系数phosphate皮膜化成viscosity涂料粘度alkalidipping脱脂main manifold主集流脉bezel斜视规blanking穿落模dejecting顶固模demagnetization去磁;消磁high-speed transmission高速传递heat dissipation热传rack上料degrease脱脂rinse水洗alkaline etch龄咬desmut剥黑膜D.I. rinse纯水次Chromate铬酸处理Anodize阳性处理seal封孔revision版次part number/P/N料号good products良品scraped products报放心品defective products不良品finished products成品disposed products处理品barcode条码flow chart流程表单assembly组装stamping冲压molding成型spare parts=buffer备品coordinate座标dismantle the die折模auxiliary fuction辅助功能poly-line多义线heater band 加热片thermocouple热电偶sand blasting喷沙grit 砂砾derusting machine除锈机degate打浇口dryer烘干机induction感应induction light感应光response=reaction=interaction感应ram连杆edge finder巡边器concave凸convex凹short射料不足nick缺口speck瑕??shine亮班splay 银纹gas mark焦痕delamination起鳞cold slug冷块blush 导色gouge沟槽;凿槽satin texture段面咬花witness line证示线patent专利grit沙砾granule=peuet=grain细粒grit maker抽粒机cushion缓冲magnalium镁铝合金magnesium镁金metal plate钣金lathe车mill锉plane刨grind磨drill铝boring镗blinster气泡fillet镶;嵌边through-hole form通孔形式voller pin formality滚针形式cam driver铡楔shank摸柄crank shaft曲柄轴augular offset角度偏差velocity速度production tempo生产进度现状torque扭矩spline=the multiple keys花键quenching淬火tempering回火annealing退火carbonization碳化tungsten high speed steel钨高速的moly high speed steel钼高速的organic solvent有机溶剂bracket小磁导liaison联络单volatile挥发性resistance电阻ion离子titrator滴定仪beacon警示灯coolant冷却液crusher破碎机阿基米德蜗杆Archimedes worm安全系数safety factor; factor of safety安全载荷safe load凹面、凹度concavity扳手wrench板簧flat leaf spring半圆键woodruff key变形deformation摆杆oscillating bar摆动从动件oscillating follower摆动从动件凸轮机构cam with oscillating follower 摆动导杆机构oscillating guide-bar mechanism 摆线齿轮cycloidal gear摆线齿形cycloidal tooth profile摆线运动规律cycloidal motion摆线针轮cycloidal-pin wheel包角angle of contact保持架cage背对背安装back-to-back arrangement背锥back cone ;normal cone背锥角back angle背锥距back cone distance比例尺scale比热容specific heat capacity闭式链closed kinematic chain闭链机构closed chain mechanism臂部arm变频器frequency converters变频调速frequency control of motor speed 变速speed change变速齿轮change gear change wheel变位齿轮modified gear变位系数modification coefficient标准齿轮standard gear标准直齿轮standard spur gear表面质量系数superficial mass factor表面传热系数surface coefficient of heat transfer 表面粗糙度surface roughness并联式组合combination in parallel并联机构parallel mechanism并联组合机构parallel combined mechanism并行工程concurrent engineering并行设计concurred design, CD不平衡相位phase angle of unbalance不平衡imbalance (or unbalance)不平衡量amount of unbalance不完全齿轮机构intermittent gearing波发生器wave generator波数number of waves补偿compensation参数化设计parameterization design, PD残余应力residual stress操纵及控制装置operation control device槽轮Geneva wheel槽轮机构Geneva mechanism ;Maltese cross 槽数Geneva numerate槽凸轮groove cam侧隙backlash差动轮系differential gear train差动螺旋机构differential screw mechanism差速器differential常用机构conventional mechanism; mechanism in common use车床lathe承载量系数bearing capacity factor承载能力bearing capacity成对安装paired mounting尺寸系列dimension series齿槽tooth space齿槽宽spacewidth齿侧间隙backlash齿顶高addendum齿顶圆addendum circle齿根高dedendum齿根圆dedendum circle齿厚tooth thickness齿距circular pitch齿宽face width齿廓tooth profile齿廓曲线tooth curve齿轮gear齿轮变速箱speed-changing gear boxes齿轮齿条机构pinion and rack齿轮插刀pinion cutter; pinion-shaped shaper cutter 齿轮滚刀hob ,hobbing cutter齿轮机构gear齿轮轮坯blank齿轮传动系pinion unit齿轮联轴器gear coupling齿条传动rack gear齿数tooth number齿数比gear ratio齿条rack齿条插刀rack cutter; rack-shaped shaper cutter齿形链、无声链silent chain齿形系数form factor齿式棘轮机构tooth ratchet mechanism插齿机gear shaper重合点coincident points重合度contact ratio冲床punch传动比transmission ratio, speed ratio传动装置gearing; transmission gear传动系统driven system传动角transmission angle传动轴transmission shaft串联式组合combination in series串联式组合机构series combined mechanism 串级调速cascade speed control创新innovation creation创新设计creation design垂直载荷、法向载荷normal load唇形橡胶密封lip rubber seal磁流体轴承magnetic fluid bearing从动带轮driven pulley从动件driven link, follower从动件平底宽度width of flat-face从动件停歇follower dwell从动件运动规律follower motion从动轮driven gear粗线bold line粗牙螺纹coarse thread大齿轮gear wheel打包机packer打滑slipping带传动belt driving带轮belt pulley带式制动器band brake单列轴承single row bearing单向推力轴承single-direction thrust bearing单万向联轴节single universal joint单位矢量unit vector当量齿轮equivalent spur gear; virtual gear当量齿数equivalent teeth number; virtual number of teeth 当量摩擦系数equivalent coefficient of friction当量载荷equivalent load刀具cutter导数derivative倒角chamfer导热性conduction of heat导程lead导程角lead angle等加等减速运动规律parabolic motion; constant acceleration and deceleration motion等速运动规律uniform motion; constant velocity motion等径凸轮conjugate yoke radial cam等宽凸轮constant-breadth cam等效构件equivalent link等效力equivalent force等效力矩equivalent moment of force等效量equivalent等效质量equivalent mass等效转动惯量equivalent moment of inertia等效动力学模型dynamically equivalent model底座chassis低副lower pair点划线chain dotted line(疲劳)点蚀pitting垫圈gasket垫片密封gasket seal碟形弹簧belleville spring顶隙bottom clearance定轴轮系ordinary gear train; gear train with fixed axes 动力学dynamics动密封kinematical seal动能dynamic energy动力粘度dynamic viscosity动力润滑dynamic lubrication动平衡dynamic balance动平衡机dynamic balancing machine动态特性dynamic characteristics动态分析设计dynamic analysis design动压力dynamic reaction动载荷dynamic load端面transverse plane端面参数transverse parameters端面齿距transverse circular pitch端面齿廓transverse tooth profile端面重合度transverse contact ratio端面模数transverse module端面压力角transverse pressure angle锻造forge对称循环应力symmetry circulating stress对心滚子从动件radial (or in-line ) roller follower对心直动从动件radial (or in-line ) translating follower对心移动从动件radial reciprocating follower对心曲柄滑块机构in-line slider-crank (or crank-slider) mechanism多列轴承multi-row bearing多楔带poly V-belt多项式运动规律polynomial motion多质量转子rotor with several masses惰轮idle gear额定寿命rating life额定载荷load ratingII 级杆组dyad发生线generating line发生面generating plane法面normal plane法面参数normal parameters法面齿距normal circular pitch法面模数normal module法面压力角normal pressure angle法向齿距normal pitch法向齿廓normal tooth profile法向直廓蜗杆straight sided normal worm法向力normal force反馈式组合feedback combining反向运动学inverse ( or backward) kinematics 反转法kinematic inversion反正切Arctan范成法generating cutting仿形法form cutting方案设计、概念设计concept design, CD防振装置shockproof device飞轮flywheel飞轮矩moment of flywheel非标准齿轮nonstandard gear非接触式密封non-contact seal非周期性速度波动aperiodic speed fluctuation非圆齿轮non-circular gear粉末合金powder metallurgy分度线reference line; standard pitch line分度圆reference circle; standard (cutting) pitch circle 分度圆柱导程角lead angle at reference cylinder分度圆柱螺旋角helix angle at reference cylinder分母denominator分子numerator分度圆锥reference cone; standard pitch cone分析法analytical method封闭差动轮系planetary differential复合铰链compound hinge复合式组合compound combining复合轮系compound (or combined) gear train 复合平带compound flat belt复合应力combined stress复式螺旋机构Compound screw mechanism复杂机构complex mechanism杆组Assur group干涉interference刚度系数stiffness coefficient刚轮rigid circular spline钢丝软轴wire soft shaft刚体导引机构body guidance mechanism刚性冲击rigid impulse (shock)刚性转子rigid rotor刚性轴承rigid bearing刚性联轴器rigid coupling高度系列height series高速带high speed belt高副higher pair格拉晓夫定理Grashoff`s law根切undercutting公称直径nominal diameter高度系列height series功work工况系数application factor工艺设计technological design工作循环图working cycle diagram工作机构operation mechanism工作载荷external loads工作空间working space工作应力working stress工作阻力effective resistance工作阻力矩effective resistance moment 公法线common normal line公共约束general constraint公制齿轮metric gears功率power功能分析设计function analyses design 共轭齿廓conjugate profiles共轭凸轮conjugate cam构件link鼓风机blower固定构件fixed link; frame固体润滑剂solid lubricant关节型操作器jointed manipulator惯性力inertia force惯性力矩moment of inertia ,shaking moment 惯性力平衡balance of shaking force惯性力完全平衡full balance of shaking force惯性力部分平衡partial balance of shaking force 惯性主矩resultant moment of inertia惯性主失resultant vector of inertia冠轮crown gear广义机构generation mechanism广义坐标generalized coordinate轨迹生成path generation轨迹发生器path generator滚刀hob滚道raceway滚动体rolling element滚动轴承rolling bearing滚动轴承代号rolling bearing identification code 滚针needle roller滚针轴承needle roller bearing滚子roller滚子轴承roller bearing滚子半径radius of roller滚子从动件roller follower滚子链roller chain滚子链联轴器double roller chain coupling 滚珠丝杆ball screw滚柱式单向超越离合器roller clutch过度切割undercutting函数发生器function generator函数生成function generation含油轴承oil bearing耗油量oil consumption耗油量系数oil consumption factor赫兹公式H. Hertz equation合成弯矩resultant bending moment合力resultant force合力矩resultant moment of force黑箱black box横坐标abscissa互换性齿轮interchangeable gears花键spline滑键、导键feather key滑动轴承sliding bearing滑动率sliding ratio滑块slider环面蜗杆toroid helicoids worm环形弹簧annular spring缓冲装置shocks; shock-absorber灰铸铁grey cast iron回程return回转体平衡balance of rotors混合轮系compound gear train积分integrate机电一体化系统设计mechanical-electrical integration system design机构mechanism机构分析analysis of mechanism机构平衡balance of mechanism机构学mechanism机构运动设计kinematic design of mechanism机构运动简图kinematic sketch of mechanism机构综合synthesis of mechanism机构组成constitution of mechanism机架frame, fixed link机架变换kinematic inversion机器machine机器人robot机器人操作器manipulator机器人学robotics技术过程technique process技术经济评价technical and economic evaluation 技术系统technique system机械machinery机械创新设计mechanical creation design, MCD 机械系统设计mechanical system design, MSD 机械动力分析dynamic analysis of machinery机械动力设计dynamic design of machinery机械动力学dynamics of machinery机械的现代设计modern machine design机械系统mechanical system机械利益mechanical advantage机械平衡balance of machinery机械手manipulator机械设计machine design; mechanical design机械特性mechanical behavior机械调速mechanical speed governors机械效率mechanical efficiency机械原理theory of machines and mechanisms机械运转不均匀系数coefficient of speed fluctuation机械无级变速mechanical stepless speed changes基础机构fundamental mechanism基本额定寿命basic rating life基于实例设计case-based design,CBD基圆base circle基圆半径radius of base circle基圆齿距base pitch基圆压力角pressure angle of base circle基圆柱base cylinder基圆锥base cone急回机构quick-return mechanism急回特性quick-return characteristics急回系数advance-to return-time ratio急回运动quick-return motion棘轮ratchet棘轮机构ratchet mechanism棘爪pawl极限位置extreme (or limiting) position极位夹角crank angle between extreme (or limiting) positions计算机辅助设计computer aided design, CAD计算机辅助制造computer aided manufacturing, CAM计算机集成制造系统computer integrated manufacturing system, CIMS计算力矩factored moment; calculation moment计算弯矩calculated bending moment加权系数weighting efficient加速度acceleration加速度分析acceleration analysis加速度曲线acceleration diagram尖点pointing; cusp尖底从动件knife-edge follower间隙backlash间歇运动机构intermittent motion mechanism减速比reduction ratio减速齿轮、减速装置reduction gear减速器speed reducer减摩性anti-friction quality渐开螺旋面involute helicoid渐开线involute渐开线齿廓involute profile渐开线齿轮involute gear渐开线发生线generating line of involute渐开线方程involute equation渐开线函数involute function渐开线蜗杆involute worm渐开线压力角pressure angle of involute渐开线花键involute spline简谐运动simple harmonic motion键key键槽keyway交变应力repeated stress交变载荷repeated fluctuating load交叉带传动cross-belt drive交错轴斜齿轮crossed helical gears胶合scoring角加速度angular acceleration角速度angular velocity角速比angular velocity ratio角接触球轴承angular contact ball bearing角接触推力轴承angular contact thrust bearing 角接触向心轴承angular contact radial bearing 角接触轴承angular contact bearing铰链、枢纽hinge校正平面correcting plane接触应力contact stress接触式密封contact seal阶梯轴multi-diameter shaft结构structure结构设计structural design截面section节点pitch point节距circular pitch; pitch of teeth节线pitch line节圆pitch circle节圆齿厚thickness on pitch circle节圆直径pitch diameter节圆锥pitch cone节圆锥角pitch cone angle解析设计analytical design紧边tight-side紧固件fastener径节diametral pitch径向radial direction径向当量动载荷dynamic equivalent radial load径向当量静载荷static equivalent radial load径向基本额定动载荷basic dynamic radial load rating径向基本额定静载荷basic static radial load tating径向接触轴承radial contact bearing径向平面radial plane径向游隙radial internal clearance径向载荷radial load径向载荷系数radial load factor径向间隙clearance静力static force静平衡static balance静载荷static load静密封static seal局部自由度passive degree of freedom矩阵matrix矩形螺纹square threaded form锯齿形螺纹buttress thread form矩形牙嵌式离合器square-jaw positive-contact clutch 绝对尺寸系数absolute dimensional factor绝对运动absolute motion绝对速度absolute velocity均衡装置load balancing mechanism抗压强度compression strength开口传动open-belt drive开式链open kinematic chain开链机构open chain mechanism可靠度degree of reliability可靠性reliability可靠性设计reliability design, RD空气弹簧air spring空间机构spatial mechanism空间连杆机构spatial linkage空间凸轮机构spatial cam空间运动副spatial kinematic pair空间运动链spatial kinematic chain 空转idle宽度系列width series框图block diagram雷诺方程Reynolds‘s equation离心力centrifugal force离心应力centrifugal stress离合器clutch离心密封centrifugal seal理论廓线pitch curve理论啮合线theoretical line of action 隶属度membership力force力多边形force polygon力封闭型凸轮机构force-drive (or force-closed) cam mechanism力矩moment力平衡equilibrium力偶couple力偶矩moment of couple连杆connecting rod, coupler连杆机构linkage连杆曲线coupler-curve连心线line of centers链chain链传动装置chain gearing链轮sprocket sprocket-wheel sprocket gear chain wheel联组V 带tight-up V belt联轴器coupling shaft coupling两维凸轮two-dimensional cam临界转速critical speed六杆机构six-bar linkage龙门刨床double Haas planer轮坯blank。
History of the development of the Steering SystemSteering system is necessary in vehicle system is the basic system, driver through the steering wheel to manipulate and control car's direction of travel, so as to realize the intention of his driving.For more than 100 years, automobile industry with mechanical and electronic technology development and progress. Today, the car is not purely mechanical sense of a car, it is the mechanical, electronic, materials and other comprehensive product. Steering system with the development of the car industry after the long evolution.The traditional steering system is mechanical steering system, automotive steering wheel, by pilot control through such a series of mechanical parts steering wheel to realize the deflection, so as to realize the steering.As in the 1950s, hydraulic power steering system in automotive applications, marked the beginning of steering system. Sources of power steering by previous human to human and hydraulic booster.Hydraulic booster HPS (Hydraulic Power Steering) is in the Steering system based on the mechanical and Hydraulic system increased a. The hydraulic system and the engine, when the general part of the engine starts, provide automobile engine power forward, another part of the kinetic energy of hydraulic system for power. Due to its reliable work, mature technology still has been widely used. The steering system of the main characteristic is the fluid pressure, reduce drivers support in the steering wheel, improved the steering light and auto operation stability.But at the same time, there are also some hydraulic power system flaw:Aiming at vehicle design and manufacture, after the completion of the vehicle steering dynamical characteristics cannot change. The direct consequence is that when the dynamical characteristics in low power, car in low segment can get very good, but in high-speed period has good way to sense, because cannot adjust dynamical characteristics, no better way drivers, When the dynamical characteristics in high power, not very good at low segment tprompt effect, If not, aiming to vehicle hydraulic system must also be in the engine driving. As a result, the energy consumption, increase fuel engine,Existing hydraulic oil leakage problems should not only to environmental pollution, and easy to other components,Aiming at low temperatures, hydraulic system performance is poor.In recent years, with the electronic technology in the wide application, steering system also more and more used electronic devices. Turn into the electronic control system, therefore, thecorresponding appeared electrohydraulic power steering system. Electrohydraulic Power Steering can be divided into two categories: electric Hydraulic Steering system (Electro Hydraulic Power - the EHPS) and electric Hydraulic Steering Electronically Controlled ECHPS Steering (Hydraulic Power Steering). Electric hydraulic steering system is in hydraulic power system on the basis of the development of hydraulic booster systems, and different is, electric hydraulic power system of power sources in the hydraulic system, but not by motor engine motor drive hydraulic system, save energy and reduce the engine fuel consumption. Electric hydraulic steering is in traditional hydraulic booster systems on the basis of the development, the difference is that the electric hydraulic steering system, electronic control devices increased. The electronic control unit can according to the steering rate, speed auto operation parameters of hydraulic system, change the size of the hydraulic booster at different speeds, so as to realize the change, dynamical characteristics. But under the motor drive hydraulic system, in turn, motor can stop turning, thereby reducing energy consumption.Although electrohydraulic power steering system of hydraulic steering overcomes the drawbacks. But due to the existence of hydraulic system, it exists the hydraulic oil leakage problem, and electrohydraulic power steering system, introduced motor drive system is more complex, costs and reliability.In order to avoid Electric hydraulic Steering system, Electric Power Steering system of Electric Power Steering (EPS) should now. It with all sorts of steering system, the biggest difference lies in the electric power steering system has no hydraulic system. Originally produced by hydraulic steering system by motor. Electric power steering system of general by the torque sensor and microprocessor, motor, etc. The basic principle is: when the driver turned the steering wheel drive shaft rotation, to install in the rotation axes of the torque sensor and torque signal into electrical signals to microprocessors, microprocessor based on speed and torque signal other vehicles running parameters, according to the set procedures in the treatment of that power motors booster direction and the size of the booster. Since 1988, the first in Japan suzuki Cervo car to equip the steering system, power steering system is widely recognized by the people.Steering system is mainly embodied in the following aspects:A power steering system can provide different at different speeds under the dynamical characteristics. In the low road, steering, to increase more light, At high speed reduced steering, even in order to improve the road are increased to damp.A power steering system only in steering motors to work, to provide power, so as to reduce energy consumption.A motor, so by battery-powered electric power steering system can not work in engine under the condition of the work.Electric power steering system should not hydraulic system, compared with hydraulic booster systems and automated assembly. And electric power steering system can change the booster program microprocessor algorithm, easy dynamical characteristics of the change.The development of science and technology is changing, the traditional steering system of steering control (wheel steering), and turn of transmission mechanism. But the thought of the spark can always bring surprise! Electronic Steering system SBW Steering (to the Wire) was changed to the traditional concept of three most with micro-controller, it was replaced By the Steering transmission mechanism, the three most into two parts. Electronic steering system is the most advanced and automotive steering system of technology. It mainly consists of steering control module, to execute module and micro controller three modules.Steering control module's main function is to torque sensor detection by the driver intention, and to detect signal (including rotation direction and rotational speed, etc) by bus to micro controller, and micro controller based on the signal, and speed feedback control module is a steering wheel to make drivers, can feel road. But this is the way, is the development of virtual according to test data of integrated, formed "experience", and by way of curing process in the form of micro controller. So it is with speed, turning to the size of the torque rate and some corresponding relation.Steering Angle sensor and actuator including steering motors, steering motor controller etc. It is the function of micro controller based on the control command, drive motor rotation Angle to execute, complete to action. Also the size of the rotation Angle sensor monitoring and feedback to micro controller, forming a complete accurate closed-loop control system, steering movement.Micro controller is the core of electronic steering system. It is receiving signal detection, processed send corresponding control signal.Due to the micro controller replaced steering transmission mechanism, thus mechanical connection between components of the system, reduce the response speed and the accuracy of the response. And to turn strategy, transmission control software programming any Settings, And other equipment, such as ABS, automatic navigation equipment. Transmission mechanism of reducing brings a bigger car interior space, give rides more fun. And turning behavior can be recorded, save in software that can help EEPROM after further perfecting the steering control strategy, even can provide evidence for the traffic accident.Auto safety question has been the focus of public attention. Steering system and lightingsystem can give at night traffic better security. Page shown above, the traditional lighting system is the vehicle to the front line irradiation, vehicles and pedestrians in corners if drivers will be hard to find in the corner, pedestrians traffic accidents. If the lighting system combined with the steering system, pictured above, when drivers in the steering wheel to the right of the steering wheel Angle, light with the right to change, the more wide illumination turn, lighting, so in a broader range of pedestrian road corner will easily be found. Currently the lighting technology has in the midrange Citroen triumph, Toyota camrys are used.At present, electronic steering system reliability and the cost is obstructed the development. If the micro controller is mainly manifested in the problem, steering system will complete failure, its not like electric power steering system and electric hydraulic steering system, in the motor or hydraulic system, also can appear when problems with human to control cars. The micro-controller electronic steering system malfunction, because no mechanical systems can be connected to the steering wheel and steering, therefore impossible to control of the car. But despite the electronic steering system is still the future development direction of steering system.汽车转向系的发展历史转向系统是在车辆系统是必要的基本制度,通过方向盘司机操纵和控制汽车的方向旅行,以实现他的驾驶意图。
附录附录ASteering Behavior and Control Technology0f Four—wheel Steering AutomobiIeABSTRACTThis paper analyses the characteristics of car four-wheel steering control to, summarizes the principle of construction four-wheel steering cars. Introduced the four-wheel steering system control strategy. Points out the four-wheel steering system control technology faces difficulties, and prospects the trend of its development.Keywords: four-wheel steering; Steering characteristics; Working principle; Control; Development;1. IntroductionWith modern road traffic system and the development of modern automobile technology, people on the car's steering control performance and driving stability requirement is increasing day by day. As the most effective improve vehicle handling performance of a kind of active chassis control technology - four-wheel steering technology. In the 1980s began in cars get application, and as the modern automobile industry and continuous development. Car four-wheel steering means in turn, the rear car can be relative to body active steering, that the car can be up to four wheels role. To improve the car turned to maneuverability, handling stability and driving safety.2. The car's steering four-wheel steering2.1 4ws cars and 2ws steering process analysisOrdinary two wheel steering can not only the front car around its own wheel rotation and relative to body deflection around the precision, then wheel rotation and not only deflection. When the driver turned the steering wheel, front wheel steering, changed directions face front tyre, produced a transverse force, through the front wheel effect on body, make the body yawing and produce centrifugal force, the rear wheels cornering,produced change direction, participate in the sports car to. And the rear and front car 4ws as, can rotation can also deflection. When the driver turned the steering wheel, front and rear wheels, that car almost at the same time to change direction, realize steering movement.In turn, the 2ws car before active steering wheel rotation just makes passive steering. Obviously, 2ws cars in steering process from the steering wheel rotation to rear wheel steering movement in between the existence of certain lag time. This phase lag 2ws automobile steering characteristics make the servo sex becomes poor, and that the car steering radius increased. In addition, 2ws car at a high speed, the steering wheel Angle relative to certain incremental, body yaw-rate and lateral acceleration incremental increases, made the car at a high speed handling and stability becomes poor. And in turn, the car 4ws has done before, rear wheel steering, active in the process of steering, high sensitivity, fast response, effectively overcome the shortcomings.2.2 4ws automobile steering wayAccording to the theory analysis and road test showed that a four-wheel steering can improve the maneuverability and steering control stability of high speed, modern 4ws car is developed according to the guiding ideology. Generally speaking, in the process of steering cars in 4ws, according to different driving conditions, front and rear wheel steering Angle should follow certain rules between. At present, the front, rear typical 4ws deflection rules generally are described below:(a) inverse phase steeringAs shown in figure A1 (a) shows, steering wheel Angle at low speeds or larger, front and rear inverse phase shift, realize that the rear wheels with the front deflect deflect instead, and with the steering wheel Angle deflection Angle increases and increases in a certain range. This redirection speed way can improve the manipulation of the car, reduce automobile portability turning radius, making cars maneuverability. Easy car turned turn, obstacle avoidance and driving, garage and parking. As for cars, if rear inverse phase 5 °, then turned can reduce minimum steering radius was about 0.5.(b) phase with steeringAs shown in figure A1 (b) shows, in a high-speed or steering wheel Angle is lesser, front and rear wheels with phase shift, realize that the rear wheels deflect the deflection direction with front wheel. Make the car body yaw-rate greatly reduce automobile body, can reduce the tendency of cornering undergo dynamic, guarantee the overtaking the highway, elevated highway, in and out, in the approach and flyovers insufficient steering state. Now, there are many 4ws cars take improving vehicle handling performance focuses on making cars on high-speed steering stability, without excessive demands in low-speed driving car course-altering maneuvers flexibility. The features is low by front wheel steering car only when only in car speeds, after up to a certain value, rear, only participate in steering phasewith four-wheel steering.(a)Reverse a steering (b)Coincidental a steeringFigure A1 four-wheel steering the front of the car, rear deflection rule3. Four-wheel steering car components and working characteristics4ws car is in front wheel steering system, and on the basis of suspension in cars on install a set of rear wheel steering system, both through certain questions of contact, making cars in front wheel steering also participate in the meanwhile, rear wheel steering. After decades of research and development, have molding 4ws car type has a variety of, composition, structure is different, working principle and control methods vary. The typical electric 4ws system mainly by the front wheel steering system, sensors, ECU, rear wheel steering actuators and rear wheel steering transmission mechanism etc. the sensor will front wheel steering motor sports the signal and the signal into ECU were analyzed and calculated, will process after the drive signal to rear wheel steering actuators, rear wheel steering actuators action, through the rear wheel steering transmission mechanism, rear wheel deflection. Meanwhile, ECU when carried out monitoring car operation condition, calculate target steering Angle and rear real-time steering Angle, the difference in value between real-time adjustment to rear wheels corner. Such, can according to the actual sports car, to realize the state car four-wheel steering. General 4ws cars equipped with two turning mode, can enter 4ws state, also can keep the traditional 2ws state, drivers can pass the driving indoor steering mode switch selection. When 4ws car in the course of driving the electronic control system malfunction, rear wheel automatic back into the middle, the automatic into the front wheel steering state, ensure like ordinary front wheel steering car driving safely as automobiles. Meanwhile, dashboard "4ws" indicator, warning drivers, stored on ECU fault condition of warranty, so that by yards.4. Four-wheel steering control of the car4ws system not only to realize the need for automotive steering movement, and guarantee the vehicle steering traveling stability. At present, in the research and development of automobile 4ws centered on improving car, the transient manipulation stability as a starting point, explore due to rear brought car in response to changes, andadopts various rear wheel control strategy and produce different effect. Auto four-wheel steering control depends on tires were lateral force, four-wheel steering can make cars in turn, the rear directly involved in for car yawing movement and lateralizing control. Through timely, accurate control of the rear wheel steering Angle, not only can shorten the process of steering the transient response, and can actively control cars the trajectory and attitude. In turn, that the car during its longitudinal direction centerline of the direction, even with the direction of the car horn decreases overlap, attitude Angle of steering bodywork cornering, improves the lateral stability car.4.1 control goalsThat car in turn to basic keep PianJiao zero gravity side car. So can greatly improve the car to the steering wheel input dynamic response characteristics, largely improved yaw-rate and lateral acceleration of transient performance indicators, lower the body posture change. From the PianJiao zero target start. According to certain control program is to realize the rear wheels to function is derived based four-wheel steering. Of course, the modern 4ws cars also have some other control goal request.4.2 control strategy model basedThe general situation of the studies are 4ws system based on a simple dof vehicle model of linear. This is just a kind of utopian mathematical model, when modeling overlooked in some of the dynamic parameters of the car without considering changes, automobile driving produces in the process of many of the random uncertainties and not very accurate. Early 4ws controller design are based on linear dynamic equation with the hypothesis, but due to the above reasons, make the design of control system doesn't meet practical needs, there is no guarantee that the vehicle steering control stability.4.3 control methodDifferent cars driving performance requirements of steering and different models of the car wheels deflection 4ws law is not the same. Thus, different 4ws vehicle USES control method is endless and same, various control method has its emphases respectively. At present, in some molding 4ws with car on the control method basically has:(a). The set than simply steering system 4ws.(b). Than before, rear wheel steering front-wheel corner function 4ws system.(c).Than before, rear wheel steering j speed function 4ws system is.(d). The 4ws with first-order lagging system.(e).With reversed-phase characteristics 4ws system(f). With optimal control characteristics of 4ws system.(g). Has since learning, white the ability to adjust the 4ws system.Former five kinds of control system belong to classical control theory category, only to satisfy car under certain conditions, but also can't adapt to the need of motor sports ofrandom changes, along with the computer technology and some advanced control theory of development, 4ws system will towards adaptive, intelligent direction.4.4 4ws system control technology developmentAt present, for research and development of car 4ws remains constant developing and perfecting stage. Although researchers from structure to control principle of four-wheel steering on have done a lot of research, 4ws technology have made many progress. But, in the use of modern control theory of automotive steering control strategy choice of methods of determination and control, mainly depend on experience, the corresponding theoretical basis is still very lack, 4ws technology not really into wide use in commercial car on stage, no widely used.In the technology in relatively mature 4ws cars, most use electric hydraulic power 4ws system. With the rapid development of electronic technology, computer technology in cars, the wide application of electronic electric 4ws system will be the trend of the development of automobile 4ws. Although in 4ws system research and development has made great development, however, as the core technical problems 4ws system - 4ws system controller design, what on earth as the best control objectives? Adopt what kind of control method? Still no in this field is the same view. Already, early before of the 4ws and the system based on a simple dof vehicle model, linear controller design are based on 4ws with linear dynamic equation hypothesis, PID control strategy. We know, 4ws system control mainly dependent on tires were transverse force. Early studies is the automobile tires as linear model, general 4ws control is based on the transverse force by tire wheel in proportion to the side PianJiao assumptions, this assumption just in the lateral acceleration smaller range effective. When in the lateral acceleration larger range, tire cornering characteristics of nonlinear area, will go to one side of the PianJiao tyres by transverse force in the response of the relationship of scale, and no longer the longitudinal force by tire vertical load, etc, have relations. In fact, car in turning down the street, tire basically all work in nonlinear area. At this time, garnish with linear control theory for research, appear reluctant to. 4ws vehicle handling dynamics problems is very complicated nonlinear multibody dynamics problems of the control system for 4ws research should be taken into account in the sports car, in-depth study of affecting its state response, establish simulation kinetic parameters of actual sports car mathematical model, adopt more effective control strategy. With the continuous development of control technology, some advanced modern control method has been applied in 4ws system control study, as optimal control and adaptive control, sliding mode control, robust control etc, in recent years, appeared again fuzzy control, based on artificial neural network theory, control method, etc. The study of 4ws control system from linear field gradually transition to nonlinear fields, some multi-degree-of-freedom car dynamics models have proposed 4ws, but mostly in infancy, is not mature. The future of thedevelopment of the system is studied 4ws trend for mainly concentrated :(a). Further research and development of new rear wheel steering actuators and rear wheel steering transmission mechanism, improve the manipulation of steering portability, flexibility and steering Angle of accuracy.(b). For 4ws system, further development, design high performance, high precision, high sensitivity sensor, in order to correctly detection car sports signal.(c). Deep study turning the tyre during transient characteristics as the main factors, to join in the mathematic model of the system 4ws.(d). The control theory and control into method is applied to the 4ws controller study.附录B四轮转向汽车的转向特性及控制技术摘要本文分析比较了四轮转向汽车的转向特点,概述了电控四轮转向汽车的结构原理。