t
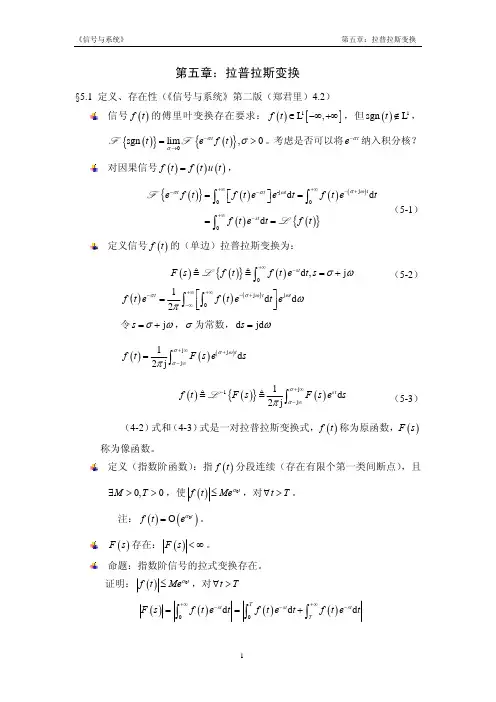
f (t) e( j)td t F ( j)
令 : j s , 具有频率的量纲 , 称为复频率。
F s f t es t dt
2.拉氏逆变换
F j f t e j t dt F s f t es t dt
对于f t e t 是F j 的傅里叶逆变换
f
(t) e t
0σ
σ0 的信号成为指数阶信号;
2.有界的非周期信号的拉氏变换一定存在;
3.lim tne t 0 0 t
4.lime te t 0 α t
5.et2 等信号比指数函数增 长快,找不到收敛坐标,
为非指数阶信号,无法进行拉氏变换。
6.一般求函数的单边拉氏变换可以不加注其收敛范 围。
f t e t 1 F j ejtd
2 π
两边同乘 以 e t f t 1 F j e jt d
2 π
其中: s j ; 若取常数,则d s jd
积分限:对 :
对s :
j
j
f t 1
j
F
s
estd s
2 π j j
例题及说明
1.满足 lim t
号与系统 信
§5.1 拉普拉斯变换
拉普拉斯变换 拉普拉斯变换的收敛域
哈尔滨理工大学
一.从傅里叶变换到拉普拉斯变换
1.拉普拉斯正变换
信号 f (t), 乘以衰减因子 e t ( 为任意实数)后容易满足
绝对可积条件,依傅氏变换定义 :
F1
F f (t) e t
f
(t
)
ቤተ መጻሕፍቲ ባይዱ
e
t
e
j
td
例题
例题
例题
例题