步进电机说明书
- 格式:pdf
- 大小:301.01 KB
- 文档页数:10

3MA22100(三相高压)细分步进驱动器使用手册Version1.0版权所有 不得翻印【使用前请仔细阅读本手册,以免损坏驱动器】宁波纳川自动化科技有限公司3MA22100步进电机驱动器使用说明 在使用本品前,请仔细阅读本使用说明书请妥善保管本说明书,以备日后参考本册外观图片仅供参考,请以实物为准安全注意事项请勿带电插拔连接线缆。
此产品非密封,请勿在内部混入镙丝、金属屑等导电性异物或可燃性异物,储存和使用时请注意防潮防湿。
驱动器为功率设备,尽量保持工作环境的散热通风。
在连上步进电机,调节好电流后使其连续工作半小时后观察步进电机是否在额定温度后方可进行后续使用,如果电机温度过高请联系制造商。
一、产品简介1.1 产品概述3MA22100是纳川科技最新推出的一款采用精密电流控制技术设计的高细分步进电机驱动器,适合驱动110-130型各种品牌的三相混合式步进电机。
由于采用了先进的抗噪声控制方法,能大幅度降低电机运转时的噪声和振动,使得步进电机运转时的噪声和平稳性趋近于伺服电机的水平。
和市场上的大多数其他细分驱动产品相比,步进电机和驱动器的发热量降幅达15-30%。
1.2 产品特点⏹高性能、低价格、超低噪声⏹电机和驱动器发热极低⏹供电电压AC110-250V⏹输出电流峰值可达8.3A(均值5.86A)⏹输入电信号TTL兼容(5V兼容)⏹静止时电流自动减半⏹可驱动三相混合式步进电机⏹高速光耦隔离信号输入,脉冲响应频率最高可达100KHz⏹抗高频干扰能力强⏹输出电流设定方便⏹有过压、欠压、过流、过热、相间短路保护功能1.2 应用领域适合各种大型自动化设备和仪器,例如:雕刻机、打标机、切割机、激光照排、绘图仪、数控机床、拿放装置等。
在用户期望低成本、小噪声、高速度的设备中效果特佳。
二、电气、机械和环境指标2.1 电气指标说明 3MA22100最小值 典型值 最大值 单位 输出电流 3.3(均值2.34)- 10(均值7.11) A 输入电源电压 110 180 250(含纹波)VAC 逻辑输入电流 7 10 16 mA 步进脉冲频率 0 - 40 KHZ 绝缘电阻500MΩ2.2 使用环境及参数冷却方式自然冷却使用环境场合 尽量避免粉尘、油雾及腐蚀性气体环境温度0℃-+50℃ 最高工作温度70℃湿度 40-90% RH9 (不能结露和有水珠)震动 5.9m/S2 Max 保存温度 -20℃-125℃ 重量约1500克2.3 机械安装图 单位:毫米2.4 加强散热方式(1)驱动器的可靠工作温度通常在65℃以内,电机的工作温度在80℃以内;(2)安装驱动器时请采用竖着侧面安装,形成较强的空气对流,必要时机内靠近驱动器出安装风扇,强制散热,保证驱动器在可靠的工作温度范围内工作。

24BYJ48 步进电机使用手册驱动方法及参数插入到开发板的方法:直接插入到LCD12864 位置一、前言:步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
为此,黑金刚开发板套件中首次引入了步进电机技术,采用扩展的方式,方便用户应用掌握。
虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。
它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。
因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。
步进电机的主要特性:1、步进电机必须加驱动才可以运转,驱动信号必须为脉冲信号,没有脉冲的时候,步进电机静止,如果加入适当的脉冲信号,就会以一定的角度(称为步角)转动。
转动的速度和脉冲的频率成正比。
2、黑金刚配套的是28BYJ48 5V 驱动的4 相5 线的步进电机,而且是减速步进电机,减速比为1:64,步进角为5.625/64度。
如果需要转动 1 圈,那么需要360/5.625*64=4096个脉冲信号。
3、步进电机具有瞬间启动和急速停止的优越特性。
4、改变脉冲的顺序,可以方便的改变转动的方向。
因此,目前打印机,绘图仪,机器人,等等设备都以步进电机为动力核心。
二、配套的原理图及程序:1、如果不考虑数据锁存功能,步进电机的扩展板电路可以简化为下图:2、黑金刚套件采用的是5V 步进电机,该步进电机的耗电流为200m a左右,采用uln2003 驱动,驱动端口为P0.0(A),P0.1(B),P0.2(C),P0.3(C)。
正转次序: AB 组--BC 组--CD 组--DA 组(即一个脉冲,正转5.625度);反转次序:AB组--AD组--CD组--CB组(即一个脉冲,正转5.625 度),如下表:表1:正转表表2:反转表3ASM 驱动程序:;*** ****步进电机的驱动********;F O S C = 12M H z;---------------------------------------------------------------------------------; 步进电机的驱动信号必须为脉冲信号!!!转动的速度和脉冲的频率成正比!!!; 本步进电机步进角为5.625 度. 一圈360 度, 需要64 个脉冲完成!!!;---------------------------------------------------------------------------------; A 组线圈对应P0.0; B 组线圈对应P0.1; C 组线圈对应P0.2; D 组线圈对应P0.3; 正转次序:AB 组--BC组--CD组--DA组(即一个脉冲,正转5.625 度);----------------------------------------------------------------------------------ORG 0000HL J M P M A I NORG 0100HM A I N:;----------------------------正转--------------------------M OV R3,#192 ;正转3 圈共192 个脉冲S T A R T:M OV R0,#00HS T A R T1:M OV P0,#00HM OV A,R0M OV D P T R,#T A B LEM OV C A,@A+D P TRJ Z START ;对A 的判断,当A=0 时则转到S T A RTM OV P0,AL C A LL D EL AYI N C R0D J N Z R3,S T A R T1M OV P0,#00HLCALL D EL AY1;-----------------------------反转------------------------M OV R3,#128 ;反转2 圈共128 个脉冲S T A R T2:M OV P0,#00HM OV R0,#05S T A R T3:M OV A,R0M OV D P T R,#T A B LEM OV C A,@A+D P TRJ Z S T A R T2M OV P0,ACALL D EL AYI N C R0D J N Z R3,S T A R T3M OV P0,#00HLCALL D EL AY1L J M P M A I N;---------------------------转速控制-----------------------D EL AY:M OV R7,#10 ;步进电机的转速M3:M OV R6,#248D J N ZR6,$D J N Z R7,M3RET;---------------------------延时控制----------------------D EL AY1:M OV R4,#5 ;2S延时子程序D EL2:M OV R3,#200D EL3:M OV R2,#250D J N ZR2,$ D JN Z R3,D E L3D J N Z R4,DE L2RET;---------------------------正反转表----------------------T A B L E:DB 03H,06H,0C H,09H;正转表DB 00;正转结束DB 03H,09H,0C H,06H;反转表DB 00;反转结束E ND4、C语言驱动程序:/******************************步进电机的驱动************************************* ;F O S C = 12M H z;---------------------------------------------------------------------------------; 步进电机的驱动信号必须为脉冲信号!!!转动的速度和脉冲的频率成正比!!!; 本步进电机步进角为5.625 度. 一圈360 度, 需要64 个脉冲完成!!!;---------------------------------------------------------------------------------; A 组线圈对应P0.0; B 组线圈对应P0.1; C 组线圈对应P0.2; D 组线圈对应P0.3; 正转次序:AB 组--BC组--CD组--DA组(即一个脉冲,正转5.625 度);----------------------------------------------------------------------------------**********************************************************************************/ /*头文件*/#i n c l ud e<r e g52.h>#i n c l ud e<i n t r i n s.h>#d e f i n e u i n t un s i gn e d i n t#d e f i n e u c h a r un s i gn e d c h a r#d e f i n e nop() _nop_()u c h a r code t a b l e1[]={0x03,0x06,0x0c,0x09};/*正转表*/u c h a r code t a b l e2[]={0x03,0x09,0x0c,0x06};/*反转表*/#d e f i n e m o t o r P0vo i d d e l a y(u c h a r m s)/*延时*/{u c h a r j;w h il e(m s--){f o r(j=0;j<250;j++){;}}}vo i d m a i n(){u c h a r i,j;w h il e(1){//正转3 圈共192 个脉冲j=0;f o r(i=0;i<192;i++){m o t o r = 0x00;m o t o r = t a b l e1[j];j++;i f(j>=4)j=0;d e l a y(2);}d e l a y(200);d e l a y(200);d e l a y(200);d e l a y(200);d e l a y(200);//正转2 圈共128 个脉冲j=0;f o r(i=0;i<128;i++){m o t o r = 0x00;m o t o r = t a b l e2[j];j++;i f(j>=4)j=0;d e l a y(2);}d e l a y(200);d e l a y(200);d e l a y(200);d e l a y(200);d e l a y(200);}}。

MECHATRONIC DRIVE WITH STEPPER MOTORTRINAMIC Motion Control GmbH & Co. KGHamburg, GermanyHardware Version V1.2HARDWARE MANUAL+ +PD-1140+ +U NIQUE F EATURES :Table of Contents2Features (3)3Order Codes (5)4Mechanical and Electrical Interfacing (6)4.1Dimensions (6)4.2Stepper Motor Specifications (7)4.3Connectors of PD-1140 (8)4.3.1Power and Communication Connector (9)4.3.1.1Power Supply (9)4.3.1.2RS485 (10)4.3.1.3CAN (11)4.3.2Multipurpose I/O Connector (12)4.3.2.1Digital Inputs IN_1, IN_2, IN_3 (13)4.3.2.2Analog Input IN_0 (14)4.3.2.3Outputs OUT_0, OUT_1 (14)4.3.3Motor Connector (15)4.3.4Mini-USB Connector (16)5Reset to Factory Defaults (17)6On-Board LEDs (18)7Operational Ratings (19)8Torque Curves (20)8.1.1PD42-1-1140 Torque Curve (20)8.1.2PD42-2-1140 Torque Curve (20)8.1.3PD42-3-1140 Torque Curve (21)8.1.4PD42-4-1140 Torque Curve (21)9Functional Description (22)10PD-1140 Operational Description (23)10.1Calculation: Velocity and Acceleration vs. Microstep and Fullstep Frequency (23)11Life Support Policy (25)12Revision History (26)12.1Document Revision (26)12.2Hardware Revision (26)13References (26)2FeaturesThe PANdrive™PD-1140 is a full mechatronic solution with state of the art feature set. It is highly integrated and offers a convenient handling. The PD-1140 includes a stepper motor, controller/driver electronics, and TRINAMICs sensOstep™ encoder. It can be used in many decentralized applications and has been designed for 0.20… 0.70Nm max. holding torque and 24V DC nominal supply voltage. With its high energy efficiency from TRINAMICs coolStep technology cost for power consumption is kept down. The TMCL™ firmware allows for standalone operation and direct mode.M AIN C HARACTERISTICSMotion controller-Motion profile calculation in real-time-On the fly alteration of motor parameters (e.g. position, velocity, acceleration)-High performance microcontroller for overall system control and serial communication protocol handlingBipolar stepper motor driver-Up to 256 microsteps per full step-High-efficient operation, low power dissipation-Dynamic current control-Integrated protection-stallGuard2 feature for stall detection-coolStep feature for reduced power consumption and heat dissipationEncoder-sensOstep magnetic encoder (1024 increments per rotation) e.g. for step-loss detection under all operating conditions and positioning supervisionInterfaces-RS485 2-wire communication interface-CAN 2.0B communication interface-USB full speed (12Mbit/s) device interface- 4 multipurpose inputs:-3x general-purpose digital inputs(Alternate functions: STOP_L / STOP_R / HOME switch inputs or A/B/N encoder input) -1x dedicated analog input- 2 general purpose outputs-1x open-drain 1A max.-1x +5V supply output (can be switched on/off in software)Software-TMCL: standalone operation or remote controlled operation,program memory (non volatile) for up to 2048 TMCL commands, andPC-based application development software TMCL-IDE available for free.Electrical and mechanical data-Supply voltage: +24V DC nominal (9… 28V DC)-Motor current: up to 2A RMS / 2.8A peak (programmable)-0.22… 0.70Nm max. holding torque (depends on motor)Refer to separate TMCL Firmware Manual, too.TRINAMIC S U NIQUE F EATURES – E ASY TO U SE WITH TMCLstallGuard2™ stallGuard2 is a high-precision sensorless load measurement using the back EMF on thecoils. It can be used for stall detection as well as other uses at loads below those which stall the motor. The stallGuard2 measurement value changes linearly over a wide range of load, velocity, and current settings. At maximum motor load, the value goes to zero or near to zero. This is the most energy-efficient point of operation for the motor.Load [Nm]stallGuard2Initial stallGuard2 (SG) value: 100%Max. loadstallGuard2 (SG) value: 0Maximum load reached. Motor close to stall. Motor stallsFigure 2.1 stallGuard2 load measurement SG as a function of loadcoolStep ™coolStep is a load-adaptive automatic current scaling based on the load measurement via stallGuard2 adapting the required current to the load. Energy consumption can be reduced by as much as 75%. coolStep allows substantial energy savings, especially for motors which see varying loads or operate at a high duty cycle. Because a stepper motor application needs to work with a torque reserve of 30% to 50%, even a constant-load application allows significant energy savings because coolStep automatically enables torque reserve when required. Reducing power consumption keeps the system cooler, increases motor life, and allows reducing cost.00,10,20,30,40,50,60,70,80,9050100150200250300350EfficiencyVelocity [RPM]Efficiency with coolStepEfficiency with 50% torque reserveFigure 2.2 Energy efficiency example with coolStep3Order CodesThe PD-1140 is currently available with four NEMA 17 stepper motors.The length of the PANdrives is specified without the length of the axis. For the overall length of the product please add 24mm.Table 3.1 PD-1140 order codesThe following options are available:Table 3.2 PD-1140 firmware optionsA cable loom set is available for this module:Table 3.2 Cable loom order codes4Mechanical and Electrical Interfacing4.1DimensionsThe PD-1140 includes the TMCM-1140 stepper motor controller/driver module, the magnetic encoder based on sensOstep technology and a NEMA17 bipolar stepper motor. Currently, there is a choice between four NEMA 17/42mm bipolar stepper motors with different lengths and different holding torques.Figure 4.1 PD-1140 dimensions4.2Stepper Motor SpecificationsM AIN CHARACTERISTICS OF FOUR DIFFERENT MOTORS AVAILABLE AS PART OF THE PD-1140Table 4.1: NEMA 17 / 42mm stepper motor technical data4.3 Connectors of PD-1140The controller/driver board of the PD-1140 offers four connectors including the motor connector which is used for attaching the motor coils to the electronics. The power and communication connector is used for power supply, CAN interface, and RS485 interface. The 8pin multipurpose I/O connector offers four multipurpose inputs and two general purpose outputs. Further, there is a connector for the USB interface.USBMotor14Multi-purposeI/O18Power and Communication16Figure 4.2 Overview connectorsFigure 4.3 Connectors and mating connectors, contacts and applicable wire4.3.1 Power and Communication ConnectorA 6pin JST PH-series 2mm pitch single row connector is used for power supply, RS485 and CAN serial communication. Please note the additional power supply information in chapter 4.3.1.1.61Table 4.1 Connector for power supply and interfaces4.3.1.1 Power SupplyFor proper operation care has to be taken with regard to power supply concept and design. Due to space restrictions the TMCM-1140 includes about 40µF/35V of supply filter capacitors. These are ceramic capacitors which have been selected for high reliability and long life time. The module includes a 28V suppressor diode for over-voltage protection. There is no reverse polarity protection. The module will short any reversed supply voltage due to the suppressor diode (uni-directional version) and the internal diodes of the driver transistors.It is important that the power supply voltage is kept below the upper limit of 28V (please see also chapter 6, operating values). Otherwise the driver electronics might be seriously damaged! Especially, when the selected operating voltage is near the upper limit a regulated power supply is highly recommended. In addition to power stabilization (buffer) and filtering this added capacitor will also reduce any voltage spikes which might otherwise occur from a combination of high inductance power supply wires and the ceramic capacitors. In addition it will limit slew-rate of power supply voltage at the module. The low ESR of ceramic-only filter capacitors may cause stability problems with some switching power supplies.4.3.1.2RS485For remote control and communication with a host system the TMCM-1140 provides a two wire RS485 bus interface. For proper operation the following items should be taken into account when setting up an RS485 network:1.BUS STRUCTURE:The network topology should follow a bus structure as closely as possible. That is, the connection between each node and the bus itself should be as short as possible. Basically, it should be short compared to the length of the bus.termination resistor (120 Ohm)termination resistor (120 Ohm)Figure 4.4 Bus structure2.BUS TERMINATION:Especially for longer busses and/or multiple nodes connected to the bus and/or high communication speeds, the bus should be properly terminated at both ends. The TMCM-1140 does not integrate any termination resistor. Therefore, 120 Ohm termination resistors at both ends of the bus have to be added externally.3.NUMBER OF NODES:The RS485 electrical interface standard (EIA-485) allows up to 32 nodes to be connected to a single bus. The bus transceiver used on the PD-1140 units (SN65HVD3082ED) has just 1/8th of the standard bus load and allows a maximum of 256 units to be connected to a single RS485 bus. 4.NO FLOATING BUS LINES:Avoid floating bus lines while neither the host/master nor one of the slaves along the bus line is transmitting data (all bus nodes switched to receive mode). Floating bus lines may lead to communication errors. In order to ensure valid signals on the bus it is recommended to use a resistor network connecting both bus lines to well defined logic levels. In contrast to the termination resistors this network is normally required just once per bus. Certain RS485 interface converters available for PCs already include these additional resistors (e.g. USB-2-485).terminationresistor(120 Ohm)RS485- / RS485BRS485+ / RS485AFigure 4.5 Bus lines with resistor network4.3.1.3CANFor remote control and communication with a host system the TMCM-1140 provides a CAN bus interface. Please note that the CAN interface is not available in case USB is connected. For proper operation the following items should be taken into account when setting up a CAN network:1.BUS STRUCTURE:The network topology should follow a bus structure as closely as possible. That is, the connection between each node and the bus itself should be as short as possible. Basically, it should be short compared to the length of the bus.termination resistor (120 Ohm)terminationresistor(120 Ohm) Figure 4.6: CAN bus structure2.BUS TERMINATION:Especially for longer busses and/or multiple nodes connected to the bus and/or high communication speeds, the bus should be properly terminated at both ends. The TMCM-1140 does not integrate any termination resistor. Therefore, 120 Ohm termination resistors at both ends of the bus have to be added externally.3.NUMBER OF NODES:The bus transceiver used on the TMCM-1140 units (TJA1050T) supports at least 110 nodes under optimum conditions. Practically achievable number of nodes per CAN bus highly depends on bus length (longer bus -> less nodes) and communication speed (higher speed -> less nodes).4.3.2Multipurpose I/O ConnectorAn 8pin JST PH-series 2mm pitch single row connector is available for all multipurpose inputs and outputs.18Table 4.4 Multipurpose I/O connector4.3.2.1 Digital Inputs IN_1, IN_2, IN_3The eight pin connector of the TMCM-1140 provides three multipurpose digital inputs IN_1, IN_2 and IN_3.All three inputs accept up-to +24V input signals. They are protected against these higher voltages using voltage resistor dividers together with limiting diodes against voltages below 0V (GND) and above +3.3V DC (see figure below).IN_1IN_2IN_3microcontroller (all)and TMC429 (IN_0, IN_1)common switch for allFigure 4.7 General purpose inputs (simplified input circuit)The three digital inputs have alternate functionality depending on configuration in software. The following functions are available:Table 4.7 Multipurpose inputs / alternate functions4.3.2.2 Analog Input IN_0The eight pin connector of the TMCM-1140 provides one dedicated analog input IN_0.This dedicated analog input offers a full scale input range of 0… +10 V with a resolution of the internal analog-to-digital converter of the microcontroller of 12bit (0… 4095).The input is protected against higher voltages up-to +24 V using voltage resistor dividers together with limiting diodes against voltages below 0 V (GND) and above +3.3 V DC (see figure below).IN_0ADC input (microcontroller)Figure 4.8 General purpose inputs (simplified input circuit)4.3.2.3 Outputs OUT_0, OUT_1The eight pin connector of the TMCM-1140 offers two general purpose outputs OUT_0 and OUT_1. OUT_0 is an open-drain output capable of switching up to 1A. The output of the N-channel MOSFET transistors is connected to a freewheeling diode for protection against voltage spikes especially from inductive loads (relais etc.) above supply voltage (see figure below).microcontrollerFigure 4.9 General purpose output OUT_0In contrast OUT_1 is able to supply +5V (100mA max.) to an external load. An integrated P-channel MOSFET allows to switch on / off this +5V supply in software (see figure below). This output might be used in order to supply +5V to an external encoder circuit.microcontrollerOUT_0Figure 4.10 General purpose output OUT_14.3.3Motor ConnectorAs motor connector a 4pin JST PH-series 2mm pitch single row connector is available. The motor connector is used for connecting the four motor wires of the two motor coils of the bipolar stepper motor to the electronics.41Table 4.5 Motor connector4.3.4 Mini-USB ConnectorA 5pin mini-USB connector is available on-board for serial communication (as alternative to the CAN and RS485 interface). This module supports USB 2.0 Full-Speed (12Mbit/s) connections.15Table 4.6 Connector for USBFor remote control and communication with a host system the TMCM-1140 provides a USB 2.0 full-speed(12Mbit/s) interface (mini-USB connector). As soon as a USB-Host is connected the module will accept commands via USB.USB B US P OWERED O PERATION M ODEThe TMCM-1140 supports both, USB self powered operation (when an external power is supplied via the power supply connector) and USB bus powered operation, (no external power supply via power supply connector).On-board digital core logic will be powered via USB in case no other supply is connected (USB bus powered operation). The digital core logic comprehends the microcontroller itself and also the EEPROM. The USB bus powered operation mode has been implemented to enable configuration, parameter settings, read-outs, firmware updates, etc. by just connecting an USB cable between module and host PC. No additional cabling or external devices (e.g. power supply) are required.Please note that the module might draw current from the USB +5V bus supply even in USB self powered operation depending on the voltage level of this supply.5Reset to Factory DefaultsIt is possible to reset the PD-1140 to factory default settings without establishing a communication link. This might be helpful in case communication parameters of the preferred interface have been set to unknown values or got accidentally lost.For this procedure two pads on the bottom side of the board have to be shortened.Please perform the following steps:1.Power supply off and USB cable disconnected2.Short two pads as marked in Figure 5.13.Power up board (power via USB is sufficient for this purpose)4.Wait until the on-board red and green LEDs start flashing fast (this might take a while)5.Power-off board (disconnect USB cable)6.Remove short between pads7.After switching on power-supply / connecting USB cable all permanent settings have beenrestored to factory defaultsShort these two padsFigure 5.1 Reset to factory default settings6On-Board LEDsThe board offers two LEDs in order to indicate board status. The function of both LEDs is dependent on the firmware version. With standard TMCL firmware the green LED should be flashing slowly during operation and the red LED should be off.When there is no valid firmware programmed into the board or during firmware update the red and green LEDs are permanently on.B EHAVIOR OF LED S WITH S TANDARD TMCL F IRMWARERed LEDGreen LEDFigure 6.1 On-board LEDs7Operational RatingsThe operational ratings show the intended or the characteristic ranges and should be used as design values.In no case shall the maximum values be exceeded!Table 7.1 General operational ratings of moduleO PERATIONAL RATINGS OF MULTIPURPOSE I/O STable 7.2 Operational ratings of multipurpose I/Os8Torque Curves8.1.1PD42-1-1140 Torque CurveFigure 8.1 PD42-1-1140 torque vs. velocity 24V / 2A, 256µsteps 8.1.2PD42-2-1140 Torque CurveFigure 8.2 PD42-2-1140 torque vs. velocity 24V / 2A, 256µsteps8.1.3PD42-3-1140 Torque CurveFigure 8.3 PD42-3-1140 torque vs. velocity 24V / 2A, 256µsteps 8.1.4PD42-4-1140 Torque CurveFigure 8.4 PD42-4-1140 torque vs. velocity 24V / 2A, 256µsteps9Functional DescriptionThe PD-1140 is a highly integrated mechatronic device which can be controlled via several serial interfaces. Communication traffic is kept low since all time critical operations, e.g. ramp calculations are performed on board. Nominal supply voltage of the unit is 24V DC. The PANdrive is designed for both: direct mode and standalone operation. Full remote control of device with feedback is possible. The firmware of the module can be updated via any of the serial interfaces.In Figure 9.1 the main parts of the PD-1140 are shown:-the microprocessor, which runs the TMCL operating system (connected to TMCL memory),-the motion controller, which calculates ramps and speed profiles internally by hardware,-the power driver with stallGuard2 and its energy efficient coolStep feature,-the MOSFET driver stage,-the QSH stepper motor, and-the sensOstep encoder with resolutions of 10bit (1024 steps) per revolution.9…Figure 9.1 Main parts of the PD-114010 PD-1140 Operational Description10.1 C alculation: Velocity and Acceleration vs. Microstep andFullstep FrequencyThe values of the parameters sent to the TMC429 do not have typical motor values like rotations per second as velocity. But these values can be calculated from the TMC429 parameters as shown in this section.Table 10.1 TMC429 velocity parametersM ICROSTEP F REQUENCYThe microstep frequency of the stepper motor is calculated with3220482][][_⋅⋅⋅=divpulse CLK velocityHz f Hz usf with usf: microstep-frequencyF ULLSTEP F REQUENCYTo calculate the fullstep frequency from the microstep frequency, the microstep frequency must be divided by the number of microsteps per fullstep.usrsHz usf Hz fsf 2][][=with fsf: fullstep-frequencyThe change in the pulse rate per time unit (pulse frequency change per second – the acceleration a ) is given by 29__max 22++⋅=div ramp div pulse CLK a f aThis results in acceleration in fullsteps of:usrs aaf 2=with af: acceleration in fullstepsE XAMPLE :Hz MHz msf 31.12207032204821000161=⋅⋅⋅=Hz Hz fsf 34.1907231.122070][6==sMHzMhz a 21.11921000)16(29112=⋅=++s MHzs MHzaf 863.1221.1196==C ALCULATION OF THE NUMBER OF ROTATIONSA stepper motor has e.g. 72 fullsteps per rotation.49.267234.1907===rotation per fullsteps fsf RPS46.1589726034.190760=⋅=⋅=rotation per fullsteps fsf RPM11Life Support PolicyTRINAMIC Motion Control GmbH & Co. KG does not authorize or warrant any of its products for use in life support systems, without the specific written consent of TRINAMIC Motion Control GmbH & Co. KG.Life support systems are equipment intended to support or sustain life, and whose failure to perform, when properly used in accordance with instructions provided, can be reasonably expected to result in personal injury or death.© TRINAMIC Motion Control GmbH & Co. KG 2013Information given in this data sheet is believed to be accurate and reliable. However neither responsibility is assumed for the consequences of its use nor for any infringement of patents or other rights of third parties, which may result from its use.Specifications are subject to change without notice.All trademarks used are property of their respective owners.12Revision History12.1Document RevisionTable 12.1 Document revision12.2H ardware RevisionTable 12.2 Hardware revision13References[PD-1140 TMCL] PD-1140 TMCL Firmware Manual [TMC262] TMC262 Datasheet[TMC429] TMC429 Datasheet[TMCL-IDE] TMCL-IDE User ManualPlease refer to .。
步进电机驱动器使用手册目录1安全事项 (2)2产品外形 (4)2.1产品外形 (4)3接口定义 (5)3.1电机、电源接口C N1 (5)3.1.1两相步进电机接线 (5)3.1.2五相步进电机接线 (6)3.2控制接口C N2 (7)3.2.1脉冲(P u l)信号/上限位信号 (9)3.2.2方向(D i r)信号/下限位信号 (9)3.2.3回零(Z e r o)信号/原点信号 (9)3.2.4脱机/使能(F r e e/E n a b l e)信号 (9)3.2.5到位(I N P)信号 (10)3.2.6就绪(R D Y)信号 (11)3.2.7接口电压 (11)3.3编码器接口C N3 (13)3.4U S B接口C N4 (14)3.5M o d b u s接口C N5 (15)4L E D指示 (16)4.1状态指示L E D (16)4.2通讯指示L E D (18)5性能参数 (18)5.1机械参数 (18)5.2安装尺寸 (19)6应用指南 (20)6.1安装准备 (20)6.2机械安装 (20)6.3电气安装 (21)6.4日常维护 (21)6.5注意事项 (21)6.5常见问题 (22)为保障使用者人身安全,保护设备正常使用,请务必阅读并遵守本章的安全事项。
在操作时违反本事项所示要求,可能会导致人员重伤或者死亡。
在操作时违反本事项所示要求,可能会引起驱动器永久损坏及附加事故。
谨防触电,爆炸或其他危险禁止在易爆、易燃或腐蚀性环境使用本产品;禁止开启产品外壳;驱动器带电时内部电压可能超过36VDC,驱动器和电机都必须接安全保护地线;驱动器内部电压不会瞬间释放,必须先切断电源,等指示灯熄灭后才能进行插拔、接线、设置、测量、搬动等人工操作;禁止带电插拔;驱动器故障时温度可能很高,必须先切断电源,等下降至安全温度后才能进行人工操作;驱动器应用于直接涉及人身安全的设备,必须配备人身安全防范措施;驱动器或设备故障时可能存在火灾隐患,必须配备消防安全防范措施。
QMOT STEPPER MOTORSTRINAMIC Motion Control GmbH & Co. KGHamburg, GermanyV 2.3QMOT QSH5718 MANUAL++QSH-5718 -41-28-05557mm 2.8A, 0.55Nm-51-28-10157mm 2.8A, 1.01Nm-56-28-12657mm 2.8A, 1.26Nm-76-28-18957mm 2.8A, 1.89Nm++Contents1Life support policy (3)2Features (4)3Order Codes (5)4Mechanical dimensions (6)4.1Dimensions (6)4.2Leadwire configuration (7)5Torque figures (8)5.1QSH5718-41-28-055 (8)5.2QSH5718-51-28-101 (9)5.3QSH5718-56-28-126 (9)5.4QSH5718-76-28-189 (10)6Considerations for operation (11)6.1Choosing the best fitting motor for an application (11)6.2Motor Current Setting (11)6.2.1Choosing the optimum current setting (12)6.2.2Choosing the standby current (12)6.3Motor Driver Supply Voltage (12)6.3.1Determining if the given driver voltage is sufficient (13)6.4Back EMF (BEMF) (13)6.5Choosing the Commutation Scheme (14)6.5.1Fullstepping (14)7Revision history (15)7.1Document revision (15)1Life support policyTRINAMIC Motion Control GmbH & Co. KG does not authorize or warrant any of its products for use in life support systems, without the specific written consent of TRINAMIC Motion Control GmbH & Co. KG.Life support systems are equipment intended to support or sustain life, and whose failure to perform, when properly used in accordance with instructions provided, can be reasonably expected to result in personal injury or death.© TRINAMIC Motion Control GmbH & Co. KG 2011Information given in this data sheet is believed to be accurate and reliable. However neither responsibility is assumed for the consequences of its use nor for any infringement of patents or other rights of third parties, which may result from its use.Specifications are subject to change without notice.2FeaturesThese two phase hybrid stepper motors are optimized for microstepping and give a good fit to the TRINAMIC family of motor controllers and drivers.Characteristics:∙NEMA 23 mounting configuration∙ 6.35mm axis diameter, 20mm axis length∙step angle 1.8∙optimized for microstep operation∙optimized fit for TMC239/TMC249/TMC262 based driver circuits∙ 4 wire connection∙CE approved∙flange max. 56.5mm x 56.5mm∙D-cut of 15mm length and 0.5mm depth∙up to 75V recommended operation voltageTable 2.1: Specifications of QSH5718-41-28-055, QSH5718-51-28-101, QSH5718-56-28-126,and QSH5718-76-28-1893Order CodesThe length of the motor is specified without the length of the axis. For the total length of the product add 24mm.Table 3.1: Order codes4Mechanical dimensions4.1DimensionsFigure 4.1: Dimensions of QSH5718. All values in mm.4.2 Leadwire configurationblackr e db l u eFigure 4.2: Leadwire configuration5 Torque figuresThe torque figures detail motor torque characteristics for half step operation in order to allow simple comparison For half step operation there are always a number of resonance points (with less torque) which are not depicted. These will be minimized by microstep operation in most applications.5.1 QSH5718-41-28-055VM: 30V, 2,8A/Phase100001000100Speed [Pps]Torque [Nm]0,5600,4800,4000,3200,2400,1600,0800,000Half stepFigure 5.1: QSH5718-41-28-055 speed vs. torque characteristicsVM: 30V, 2,8A/Phase100001000100Speed [Pps]Torque [Nm]1,0500,9000,7500,6000,4500,3000,1500,000Half stepFigure 5.2: QSH-5718-51-28-101 speed vs. torque characteristics5.3 QSH5718-56-28-126VM: 30V, 2,8A/Phase100001000100Speed [Pps]Torque [Nm]1.2601.0800.9000.7200.5400.3600.1800.000Half stepFigure 5.3: QSH5718-56-28-126 speed vs. torque characteristicsVM: 30V, 2,8A/Phase100001000100Speed [Pps]Torque [Nm]2,1001,8001,5001,2000,9000,6000,3000,000Half stepFigure 5.4: QSH5718-76-28-189 speed vs. torque characteristics6Considerations for operationThe following chapters try to help you to correctly set the key operation parameters in order to get a stable system.6.1Choosing the best fitting motor for an applicationFor an optimum solution it is important to fit the motor to the application and to choose the best mode of operation. The key parameters are the desired motor torque and velocity. While the motor holding torque describes the torque at stand-still, and gives a good indication for comparing different motors, it is not the key parameter for the best fitting motor. The required torque is a result of static load on the motor, dynamic loads which occur during acceleration/deceleration and loads due to friction. In most applications the load at maximum desired motor velocity is most critical, because of the reduction of motor torque at higher velocity. While the required velocity generally is well known, the required torque often is only roughly known. Generally, longer motors and motors with a larger diameter deliver a higher torque. But, using the same driver voltage for the motor, the larger motor earlier looses torque when increasing motor velocity. This means, that for a high torque at a high motor velocity, the smaller motor might be the better fitting solution.Please refer to the torque vs. velocity diagram to determine the best fitting motor, which delivers enough torque at the desired velocities.Determining the maximum torque required by your applicationJust try a motor with a torque 30-50% above the application’s maximum requirement. Take into consideration worst case conditions, i.e. minimum driver supply voltage and minimum driver current, maximum or minimum environment temperature (whichever is worse) and maximum friction of mechanics. Now, consider that you want to be on the safe side, and add some 10 percent safety margin to take into account for unknown degradation of mechanics and motor. Therefore try to get a feeling for the motor reliability at slightly increased load, especially at maximum velocity. That is also a good test to check the operation at a velocity a little higher than the maximum application velocity.6.2Motor Current SettingBasically, the motor torque is proportional to the motor current, as long as the current stays at a reasonable level. At the same time, the power consumption of the motor (and driver) is proportional to the square of the motor current. Optimally, the motor should be chosen to bring the required performance at the rated motor current. For a short time, the motor current may be raised above this level in order to get increased torque, but care has to be taken in order not to exceed the maximum coil temperature of 130°C respectively a continuous motor operation temperature of 90°C.Table 6.1: Motor current settings6.2.1Choosing the optimum current settingGenerally, you choose the motor in order to give the desired performance at nominal current. For short time operation, you might want to increase the motor current to get a higher torque than specified for the motor. In a hot environment, you might want to work with a reduced motor current in order to reduce motor self heating.The Trinamic drivers allow setting the motor current for up to three conditions:-Stand still (choose a low current)-Nominal operation (nominal current)-High acceleration (if increased torque is required: You may choose a current above the nominal setting, but be aware, that the mean power dissipation shall not exceed the motors nominal rating)6.2.2Choosing the standby currentMost applications do not need much torque during motor standstill. You should always reduce the motor current during standstill. This reduces power dissipation and heat generation. Depending on your application, you typically at least can half power dissipation. There are several aspects why this is possible: In standstill, motor torque is higher than at any other velocity. Thus, you do not need the full current even with a static load! Your application might need no torque at all, but you might need to keep the exact microstep position: Try how low you can go in your application. If the microstep position exactness does not matter for the time of standstill, you might even reduce the motor current to zero, provided that there is no static load on the motor and enough friction in order to avoid complete position loss.6.3Motor Driver Supply VoltageThe driver supply voltage in many applications cannot be chosen freely, because other components have a fixed supply voltage of e.g. 24V DC. If you have the possibility to choose the driver supply voltage, please refer to the driver data sheet and consider that a higher voltage means a higher torque at higher velocity. The motor torque diagrams are measured for a given supply voltage. You typically can scale the velocity axis (steps/sec) proportionally to the supply voltage to adapt the curve, e.g. if the curve is measured for 48V and you consider operation at 24V, half all values on the x-Axis to get an idea of the motor performance.For a chopper driver, consider the following corner values for the driver supply voltage (motor voltage). The table is based on the nominal motor voltage, which normally just has a theoretical background in order to determine the resistive loss in the motor.Comment on the nominal motor voltage: Array(Please refer to motor technical data table.)Table 6.2: Driver supply voltage considerations6.3.1Determining if the given driver voltage is sufficientTry to brake the motor and listen to it at different velocities. Does the sound of the motor get raucous or harsh when exceeding some velocity? Then the motor gets into a resonance area. The reason is that the motor back-EMF voltage reaches the supply voltage. Thus, the driver cannot bring the full current into the motor any more. This is typically a sign, that the motor velocity should not be further increased, because resonances and reduced current affect motor torque.Measure the motor coil current at maximum desired velocityFor microstepping: If the waveform is still basically sinusoidal, the motor driver supply voltage is sufficient.For Fullstepping: If the motor current still reaches a constant plateau, the driver voltage is sufficient. If you determine, that the voltage is not sufficient, you could either increase the voltage or reduce the current (and thus torque).6.4Back EMF (BEMF)Within SI units, the numeric value of the BEMF constant has the same numeric value as the numeric value of the torque constant. For example, a motor with a torque constant of 1 Nm/A would have a BEMF constant of 1V/rad/s. Turning such a motor with 1 rps (1 rps = 1 revolution per second = 6.28 rad/s) generates a BEMF voltage of 6.28V.The Back EMF constant can be calculated as:is multiplied by 2 in this formula, The voltage is valid as RMS voltage per coil, thus the nominal current INOMsince the nominal current assumes a full step position, with two coils switched on. The torque is in unit [Nm] where 1Nm = 100cNm = 1000mNm.One can easily measure the BEMF constant of a two phase stepper motor with a (digital) scope. One just has to measure the voltage of one coil (one phase) when turning the axis of the motor manually. With this, one gets a voltage (amplitude) and a frequency of a periodic voltage signal (sine wave). The full stepfrequency is 4 times the frequency the measured sine wave.6.5Choosing the Commutation SchemeWhile the motor performance curves are depicted for fullstepping and halfstepping, most modern drivers provide a microstepping scheme. Microstepping uses a discrete sine and a cosine wave to drive both coils of the motor, and gives a very smooth motor behavior as well as an increased position resolution. The amplitude of the waves is 1.41 times the nominal motor current, while the RMS values equal the nominal motor current. The stepper motor does not make loud steps any more – it turns smoothly! Therefore, 16 microsteps or more are recommended for a smooth operation and the avoidance of resonances. To operate the motor at fullstepping, some considerations should be taken into account.Table 6.3: Comparing microstepping and fullsteppingMicrostepping gives the best performance for most applications and can be considered as state-of-the art. However, fullstepping allows some ten percent higher motor velocities, when compared to microstepping. A combination of microstepping at low and medium velocities and fullstepping at high velocities gives best performance at all velocities and is most universal. Most Trinamic driver modules support all three modes.6.5.1FullsteppingWhen operating the motor in fullstep, resonances may occur. The resonance frequencies depend on the motor load. When the motor gets into a resonance area, it even might not turn anymore! Thus you should avoid resonance frequencies.6.5.1.1Avoiding motor resonance in fullstep operationDo not operate the motor at resonance velocities for extended periods of time. Use a reasonably high acceleration in order to accelerate to a resonance-free velocity. This avoids the build-up of resonances. When resonances occur at very high velocities, try reducing the current setting.A resonance dampener might be required, if the resonance frequencies cannot be skipped.7Revision history 7.1Document revisionTable 7.1: Documentation revisionMouser ElectronicsAuthorized DistributorClick to View Pricing, Inventory, Delivery & Lifecycle Information:A nalog Devices Inc.:QSH5718-76-28-189QSH5718-56-28-126QSH5718-51-28-101QSH5718-41-28-055。
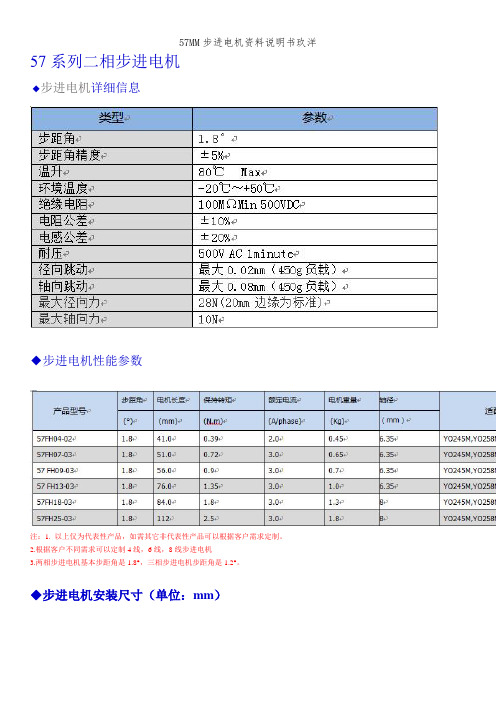
57系列二相步进电机◆步进电机详细信息◆步进电机性能参数注:1. 以上仅为代表性产品,如需其它非代表性产品可以根据客户需求定制。
2.根据客户不同需求可以定制4线,6线,8线步进电机3.两相步进电机基本步距角是1.8°,三相步进电机步距角是1.2°。
◆步进电机安装尺寸(单位:mm)57 FH系列步进电机标准出轴为光轴,直径6.35mm,直径8mm,伸出轴长度21mm。
可按用户要求铣单扁、做双出轴、变更出轴长度;也可按用户要求定制电气参数,例如电流大小;或根据用户使用环境做参数调整,例如供电电压36V要求低速大力矩;还可按用户提供样品仿制步进电机。
◆步进电机曲线图说明◆步进电机接线图说明注意:◆电机特性数据和技术数据都是在匹配我公司驱动器驱动YBM86的情况下测得,测试电压为DC28V。
◆步进电机力矩测试数据与驱动器型号、参数设置、驱动器供电电压密切相关;同规格步进电机因定转子间隙不同,饶线方式不同,其矩频特性也不同。
◆电机安装前务必用电机前端盖安装止口定位,并注意公差配合,严格保证电机轴与负载轴的同心度,不同心会导致断轴。
◆电机与负载连接时,严禁敲击,电机轴与轴承受敲击后可能影响电机性能,甚至损坏。
◆电机与驱动器连接时,请勿接错相,错相或缺相时电机不能正常运转,可能损伤步进电机驱动器。
◆无电机接线图时,用万用表测量,电机线两两相通,分别接A+A-、B+B-。
无万用表时,挑两根电机线短接,若电机轴旋转阻力增大,则这两根线是一组线圈。
电机旋转初始方向与所需方向相反时,把A+A-两线换位即可57BYGH系列步进电机说明书步距角:0.9/1.8度绝缘电阻:500 V DC 100MΩ绝缘强度:500V AC 1 Minute温升:65K环境温度:-10℃~+55℃绝缘等级:B二相混合式步进电机型号相数电压(V)额定电流(A)电阻(Ω)电感(mH)静转矩(Kg.cm)定位转矩(kg.cm)重量(Kg)机身长(mm)出轴长(mm)接线图57BYGH101 4 3 1.3 2.3 2.2 4.9 0.3 0.45 45 21 a 57BYGH102 2 5.1 0.75 6.8 12.5 5 0.3 0.45 45 21 b 57BYGH201 4 12 0.7 17.5 22 8.5 0.7 0.65 55 21 a 57BYGH202 2 2.4 1.5 1.6 4.0 8 0.7 0.65 55 21 b 57BYGH203 4 5 1.5 3.3 3.6 8.5 0.7 0.65 55 21 a 57BYGH204 4 2.7 3 0.9 1.4 8.5 0.7 0.65 55 21 a 57BYGH205 2 4.4 1.15 3.8 8 9 0.7 0.65 55 21 b 57BYGH206 4 4 1.6 2.5 3.5 8.5 0.7 0.65 55 21 a 57BYGH207 4 3 2 1.5 2 8.5 0.7 0.65 55 21 a 57BYGH208 2 1.8 3 0.6 1.3 8.5 0.7 0.65 55 21 b 57BYGH209 2 4.5 1.5 3 5.4 9 0.7 0.65 55 21 b 57BYGH301 4 3.0 3 1.0 1.8 14 0.9 1.0 76 21 a 57BYGH302 4 2.6 2.4 1.1 1.9 14 0.9 1.0 76 21 a 57BYGH303 4 5.4 1.5 3.6 6.8 14 0.9 1.0 76 21 a 57BYGH304 4 7 1.5 4.7 7.4 14 0.9 1.0 76 21 a 57BYGH306 2 2.7 3 0.9 2.2 15 0.9 1.0 76 21 b 57BYGH308 4 2.4 3 0.8 1.7 14 0.9 1.0 76 21 a 57BYGH401 4 2.7 3 0.9 1.9 20 1.1 1.5 96 21 a型号相数电压(V)额定电流(A)电阻(Ω)电感(mH)静转矩(Kg.cm)定位转矩(kg.cm)重量(Kg)机身长(mm)出轴长(mm)接线图接线说明:步进电机与步进电机驱动器的接法很简单:只要能分清楚电机的A+,A-,B+,B-端就可以了。

EasySmc 2130 步进电机控制器使用说明厦门华菱工控技术有限公司Xiamen Hualing Industry Control Technology Co.,Ltd一、概述 (1)二、性能指标 (1)三、运动控制系统组成框图 (1)3.1、PLC作为上位机,如松下的FP0-C10CR,带RS-232C串口 (1)3.2、工业控制计算机作为上位机,使用RS232 OR RS485与 EasySmc 2130 构成主从系统 (2)3.3、EasyHmi作为上位机,可最大限度的提高性能价格比,需要用户订制 (2)四、接线说明和跳线定义 (2)4.1、外形尺寸说明 (3)4.2、接线端说明 (3)4.2.1、电源输入信号 (3)4.2.2、串行口信号 (3)4.2.3、步进电机驱动信号 (3)4.2.4、下限输入,原点输入,上限输入,外部联锁输入信号 (4)4.2.5、紧急故障停止输入信号 (5)4.2.6、手动信号输入 (5)4.3、手动/联机跳线说明 (5)五、串行口控制命令说明 (5)5.1、初始化命令 (7)5.1.1、设置X轴加速度,起跳频率,最大速度(命令码1......7) (7)5.1.2、设置Y轴加速度,起跳频率,最大速度(命令码8......12). (8)5.1.3、设置Z轴加速度,起跳频率,最大速度(命令码13......15).. (9)5.1.4、设置各轴手动参数和反向复位距离S(命令码16+DAT1) (9)5.1.5、恢复默认的控制器参数,保存当前的控制器参数(命令码17+DAT1) (9)5.1.6、紧急制动、平滑制动命令(命令码18+DAT1) (9)5.1.7、控制命令(命令码19+DAT1) (10)5.2、轴位置参数设置命令 (11)5.2.1、设置X轴软件限位寄存器(命令码21+DAT1) (11)5.2.2、设置Y轴软件限位寄存器(命令码22+DAT1) (11)5.2.3、设置Z轴软件限位寄存器(命令码23+DAT1) (11)5.2.4、设置X轴当前位置寄存器(命令码24+DAT1) (11)5.2.5、设置Y轴当前位置寄存器(命令码25+DAT1) (11)5.2.6、设置Z轴当前位置寄存器(命令码26+DAT1) (12)5.3、轴状态和运动参数查询命令 (12)5.3.1、查询X轴状态(命令码31+DAT1) (12)5.3.2、查询Y轴状态(命令码32+DAT1) (12)5.3.3、查询Z轴状态(命令码33+DAT1) (12)5.3.4、查询X轴运动参数(命令码34+DAT1) (12)5.3.5、查询Y轴运动参数(命令码35+DAT1) (13)5.3.6、查询Z轴运动参数(命令码36+DAT1) (14)5.3.7、读出控制器当前手动、联机状态(命令码37+DAT1) (14)5.3.8、命令执行情况的查询(命令码38+DAT1) (15)5.4、复位运动命令和独立运动命令 (16)5.4.1、X轴复位运动(命令码41+DAT1) (16)5.4.2、Y轴复位运动(命令码42+DAT1) (17)5.4.3、Z轴复位运动(命令码43+DAT1) (17)5.4.4、X轴独立运动(命令码44+DAT1) (17)5.5、直线插补命令 (17)5.5.1、XY直线插补运动(命令码51+DAT1+DAT2) (17)5.5.2、XZ直线插补运动(命令码52+DAT1+DAT2) (18)5.5.3、YZ直线插补运动(命令码53+DAT1+DAT2) (18)5.5.4、XYZ直线插补运动(命令码57+DAT1+DAT2+DAT3) (18)5.6、圆弧插补命令 (18)5.6.1、XY圆弧插补运动(命令码61+DAT1+DAT2+DAT3) (18)5.6.2、XZ圆弧插补运动(命令码62+DAT1+DAT2+DAT3) (19)5.6.3、YZ圆弧插补运动(命令码63+DAT1+DAT2+DAT3) (19)5.7、样条插补命令 (19)5.7.1、命令格式 (19)5.7.2、样条同步输出功能 (21)5.8、其它 (21)5.8.1、计数器(2个) (21)5.8.2、程序下载、上载、脱机执行 (21)六、故障检查、维修保养、售后服务 (22)附录 (23)动控制系统。

yf19步进电机控制器说明书摘要:一、概述二、产品特点三、技术参数四、工作原理五、安装与使用六、注意事项七、故障排除八、售后服务正文:一、概述yf19 步进电机控制器是一款高性能的步进电机控制设备,适用于各种步进电机的控制。
它能够精确地控制步进电机的旋转角度和转速,广泛应用于各种自动化设备、机器人和数控机床等领域。
二、产品特点1.高精度:yf19 步进电机控制器能够精确地控制步进电机的旋转角度和转速,提高了设备的运动精度。
2.高效率:yf19 步进电机控制器采用优化的控制算法,有效地提高了步进电机的工作效率。
3.稳定性:yf19 步进电机控制器具有优良的抗干扰性能,确保设备在各种工况下的稳定运行。
4.可编程:yf19 步进电机控制器支持编程,用户可以根据实际需求设置控制参数,以满足不同应用场景的需求。
三、技术参数1.控制方式:脉冲控制2.工作电压:DC 24V3.脉冲信号输入:脉冲信号输入正(PUL)、脉冲信号输入负(PUL-)、方向电平信号(DIR)、方向电平信号负(DIR-)4.脱机信号输入:脱机信号输入正(EN)、脱机信号输入负(EN-)5.输出电流:0-2A(可根据用户需求定制)四、工作原理yf19 步进电机控制器通过接收脉冲信号来控制步进电机的旋转。
当控制器接收到脉冲信号时,它会将脉冲信号转换为相应的电流信号,并通过驱动器将电流信号传递给步进电机,从而驱动步进电机旋转。
五、安装与使用1.选购合适的步进电机和驱动器,确保它们与控制器的接口兼容。
2.将步进电机和驱动器连接到控制器上,并确保接线正确无误。
3.接通电源,并确保控制器的工作电压与步进电机和驱动器的工作电压一致。
4.通过编程设置控制器的控制参数,以满足实际应用需求。
5.启动设备,观察步进电机的旋转情况,如有异常,请及时排查故障。
六、注意事项1.控制器应避免暴露在潮湿、高温和有腐蚀性的环境中,以免损坏设备。
2.接线时应确保线缆牢固,避免线缆松动导致设备故障。

上海安浦鸣志自动化设备有限公司STM23R集成式步进电机用户手册目录1 产品介绍 (4)1.1 概述 (4)1.2 特性 (4)1.3 功能框图 (5)1.4 安全须知 (6)2 开始前的准备 (7)2.1 安装硬件 (7)2.2 选择合适的电源 (7)2.2.1 选择电源电压 (7)2.2.2 选择电源电流 (9)3 安装及接线 (12)3.1 连接电源 (12)3.2 连接输入 & 输出 (13)3.2.1 连接引脚图 (13)3.2.2 脉冲方向输入 (13)3.2.3 使能输入 (14)3.2.4 报警输出 (15)4 开关选择 (17)4.1 运行电流 (17)4.2 空闲电流 (17)4.3 自测模式 (18)4.4 数字信号滤波 (18)4.5 细分插补技术 (18)4.6 抗共振 (19)4.7 步进脉冲类型 (19)4.8 细分设置 (20)5 错误代码 (21)6 参考资料 (22)6.1 机械尺寸 (22)6.2 技术规格 (23)6.3 力矩曲线 (24)6.4 散热 (25)7 联系MOONS’ (27)本用户手册所述内容仅适用于以下机型:1 产品介绍感谢您选择鸣志STM23R集成式电机产品。
希望我们产品优越的性能、优异的质量和优秀的性价比可以帮助您成功的完成运动控制项目。
1.1 概述STM23R系列是基于PID电流控制算法设计的高性能、细分型步进电机和驱动器集成化产品,具有优越的性能表现,高速大力矩输出,低噪音,低振动,许多配置参数为拨码开关可选。
希望我们产品优越的性能、优异的质量和优秀的性价比可以帮助您成功的完成运动控制项目。
1.2 特性•供电电源 12 - 70V的直流电源•输出电流拨码开关设定,4种开关选择,最大5A•输出力矩 STM23R-2 最大可达 0.9 N.mSTM23R-3 最大可达 1.5 N.m•输入 & 输出 3 路光电隔离数字输入,5 -24V1 路光电隔离数字输出,30V 100mA•电流控制先进的数字电流控制提供卓越的高速力矩,4位开关选择设置分别为设定最大电流的50%,70%,90%,100%•速度范围最高可达60rps•空闲电流拨码开关选择,在电机停止运行后1.0秒电流会自动减为额定电流的 50%或90%•自测模式电机以1转每秒的速度做正反转往复运动,拨码开关选择,ON时启用,OFF时关闭•数字信号滤波有效滤出信号输入时的噪音。
sd2280步进电机驱动器说明书1、首先确定步进电机拖动负载所需要的扭矩。
最简单的方法是在负载轴上加一杠杆,用弹簧秤拉动杠杆,拉力乘以力臂长度既是负载力矩。
或者根据负载特性从理论上计算出来。
由于步进电机是控制类电机,所以目前常用步进电机的最大力矩不超过45Nm,力矩越大,成本越高,如果您所选择的电机力矩较大或超过此范围,可以考虑加配减速装置。
2、确定步进电机的最高运行转速。
转速指标在步进电机的选取时至关重要,步进电机的特性是随着电机转速的升高,扭矩下降,其下降的快慢和很多参数有关,如:驱动器的驱动电压、电机的相电流、电机的相电感、电机大小等等,一般的规律是:驱动电压越高,力矩下降越慢;电机的相电流越大,力矩下降越慢。
在设计方案时,应使电机的转速控制在600转每分或800转每分以内,当然这样说很不规范,可以参考矩-频特性。
3、根据负载最大力矩和最高转速这两个重要指标,再参考矩-频特性,就可以选择出适合自己的步进电机。
如果您认为自己选出的电机太大,可以考虑加配减速装置,这样可以节约成本,也可以使您的设计更灵活。
要选择好合适的减速比,要综合考虑力矩和速度的关系,选择出最佳方案。
4、最后还要考虑留有一定的力矩余量和转速余量。
5、可以先选择混合式步进电机,如果由于价格因素,可以选取反应式步进电机。
6、尽量选取细分驱动器,且使驱动器工作在细分状态。
7、选取时且勿走入只看电机力矩这一个指标的误区,也就是说并非电机的扭矩越大越好,要和速度指标一起考虑。
8、超小型驱动器和微型驱动器是靠外壳作为散热器的,应固定在较大、较厚的金属板上或外加风机散热,如果没有散热条件,而驱动器又工作在转速较低的场合(这时驱动器发热较大),可以选用带风机的90型驱动器代替。

Instruction ManualStep Motor Driver (24 VDC Servo) Pulse input type Series LECPA###-#The intended use of the step motor driver is to control the movement of an electrical actuator in response to step data and electrical inputs.These safety instructions are intended to prevent hazardous situations and/or equipment damage. These instructions indicate the level of potential hazard with the labels of “Caution,” “Warning” or “Danger.”They are all important notes for safety and must be followed in addition to International Standards (ISO/IEC) *1), and other safety regulations.IEC 60204-1: Safety of machinery - Electrical equipment of machines. (Part 1: General requirements)ISO 10218-1: Robots and robotic devices - Safety requirements for industrial robots - Part 1: Robots.• Refer to product catalogue, Operation Manual and Handling Precautions for SMC Products for additional information. • Keep this manual in a safe place for future reference.CautionCaution indicates a hazard with a low level of risk which, if not avoided, could result in minor or moderate injury.WarningWarning indicates a hazard with a medium level of riskwhich, if not avoided, could result in death or serious injury.DangerDanger indicates a hazard with a high level of risk which, ifnot avoided, will result in death or serious injury.Warning• Always ensure compliance with relevant safety laws and standards.• All work must be carried out in a safe manner by a qualified person in compliance with applicable national regulations.2.1General specificationsItemSpecificationsCompatible motorStep motor (servo 24 VDC)Power supply voltage24 VDC +/-10%(motor drive control, stop, lock brake release).Current consumption 3 A (Peak 5 A) maximum Parallel Inputs 5 inputs (photo-coupler isolation) Parallel Outputs 9 outputs (photo-coupler isolation)Compatible encoderIncremental A/B phase(resolution: 800 pulses / rotation)Serial communication RS485Lock controlForced lock release terminal (applicable tonon-magnetizing lock). Cable lengthIO cable: 5 m maximumActuator cable: 20 m maximumCooling method Natural air-cooling Operatingtemperature0o C to 40o C (no freezing)Storage temperature -10o C to 60o C (no freezing) Operating humidity 90% RH or less (no condensation)Insulation resistance50 MΩ (500 VDC)between external terminals and caseWeight120 g (Direct mounting type)140 g (DIN rail mounting type)WarningSpecial products (-X) might have specifications different from those shown in this section. Contact SMC for specific drawings.4 Installation4.1 InstallationWarning• Do not install the product unless the safety instructions have been read and understood.• Design the installation so that the temperature surrounding the controller is within the specified operating temperature. Leave enough space between the controllers so that the operating temperature of the controllers remains within the specification range.• Mount the controller vertically with 30 mm minimum space on the top and bottom of the controller as shown below.• Allow 60 mm minimum space between the front of the controller and a door (lid) so that the connectors can be connected and disconnected.4.2 Mounting• The controller can be direct mounted using screws or mounted on a DIN rail (model LECPA##D).• When using DIN rail mounting, hook the controller on the DIN rail and press the lever down to lock it.CautionIf the mounting surface for the controller is not flat or is uneven, excessive stress may be applied to the enclosure, which can cause failure. Be sure to mount on a flat surface. 4.3 EnvironmentWarning• Do not use in an environment where corrosive gases, chemicals, salt water or steam are present.• Do not use in an explosive atmosphere.• Do not expose to direct sunlight. Use a suitable protective cover.• Do not install in a location subject to vibration or impact in excess of the product’s specifications.• Do not mount in a location exposed to radiant heat that would result in temperatures in excess of the product’s specifications.• Avoid mounting the controller near a vibration source, such as a large electromagnetic contactor or circuit breaker on the same panel. • Do not use in an environment with strong magnetic fields present. 4.4 WiringCaution• Do not perform wiring while the power is on. • Confirm proper insulation of wiring.• Do not route wires and cables together with power or high voltage cables.• Keep wiring as short as possible to prevent interference from electromagnetic noise and surge voltage.• Do not use an inrush current limited type of power supply for the controller.• Do not connect multiple wires to one connector terminal.Power Supply ConnectorWire the power supply cable to the power supply plug connector, then insert it into connector PWR on the driver.• Use special screwdriver (Phoenix Contact No. SZS0.4×2.0) to open / close lever and insert the wire into the connector terminal.Power Supply Wire specificationsPrepare the wiring according to the following specifications (to be prepared by the user).ORIGINAL INSTRUCTIONSPower supply connector. SMC Part No. LEC-D-1-1. Phoenix Contact Part No: FK-MC0.5/5-ST-2.510 mm minimum Driver30 mm min. (Direct mounting) 50 mm min. (DIN rail mounting)30 mm minimumParallel I/O Connector• When connecting the parallel I/O connector to a PLC use an SMC parallel I/O cable (LEC-CL5-#).• There are 2 types of parallel I/O with this controller: NPN type and PNP type. Check the polarity required before use.The parallel I/O wiring should be prepared according to the polarity.For further details of the Parallel I/O wiring refer to the Operation Manual on the SMC website (URL: https:// ).4.5 Ground connection• Place a ground cable with crimped terminal under one of the M4 mounting screws with a shakeproof washer and tighten the screw.CautionThe M4 screw, cable with crimped terminal and shakeproof washer must be prepared by the user.The controller must be connected to Ground to reduce noise. If higher noise resistance is required, ground the 0 V (signal ground). When grounding the 0 V, avoid flowing noise from ground to 0 V.• A dedicated Ground connection must be used. Grounding should be to a D-class ground (ground resistance of 100 Ω maximum).• The cross-sectional area of the ground cable shall be 2 mm 2 minimum. • The Grounding point should be as near as possible to the controller. Keep the grounding cable as short as possible.In order to move the electric actuator to a specific position, it is necessary to set up the patterns of operation with a PC using the controller setting software or by using a teaching box. This set up data will be recorded in the memory of the controller.Step data describes the data that sets items of operation (such as positioning width) excluding speed, position, acceleration, and deceleration, which are determined by the pulse-signal input. Step data will become effective as soon as it is recorded into the driver.Refer to the Operation Manual on the SMC website (URL: https:// ) for further setting details.Refer to the table below for details of the LED status.LEDDescriptionPWROFFPower is not supplied Green LED is ON Power is suppliedGreen LED is flashingEEPROM memory writing ALM OFFNormal operationRed LED is ONController Alarm generated7 How to OrderRefer to the catalogue on the SMC website (URL: https:// ) for the How to Order information.8 Outline Dimensions (mm)Refer to the drawings / operation manual on the SMC website (URL: https:// ) for outline dimensions.9 Maintenance9.1 General MaintenanceCaution• Not following proper maintenance procedures could cause the product to malfunction and lead to equipment damage.• Before performing maintenance, turn off the power supply. Check the voltage with a tester 5 minutes after the power supply is turned OFF. • If any electrical connections are disturbed during maintenance, ensure they are reconnected correctly and safety checks are carried out as required to ensure continued compliance with applicable national regulations.• Do not make any modification to the product.• Do not disassemble the product, unless required by installation or maintenance instructions.Caution• Maintenance should be performed according to the procedure indicated in the Operation Manual.• When equipment is serviced, first confirm that measures are in place to prevent dropping of work pieces and run-away of equipment, etc, then cut the power supply to the system. When machinery is restarted, check that operation is normal with actuators in the correct position.Warning• Perform maintenance checks periodically.• Confirm wiring and screws are not loose. Loose screws or wires may cause unexpected malfunction.• Conduct an appropriate functional inspection and test after completing maintenance. In case of any abnormalities (if the actuator does not move, etc.), stop the operation of the system. Otherwise, an unexpected malfunction may occur and it will become impossible to ensure safety. Operate an emergency stop instruction to confirm safety. • Do not put anything conductive or flammable inside of the controller. • Ensure sufficient space around the controller for maintenance.10 Limitations of Use10.1 Limited warranty and Disclaimer/Compliance Requirements Refer to Handling Precautions for SMC Products.11 Product disposalThis product shall not be disposed of as municipal waste. Check your local regulations and guidelines to dispose of this product correctly, in order to reduce the impact on human health and the environment.12 ContactsRefer to or www.smc.eu for your local distributor / importer.URL: https:// (Global) https://www.smc.eu (Europe) SMC Corporation, 4-14-1, Sotokanda, Chiyoda-ku, Tokyo 101-0021, Japan Specifications are subject to change without prior notice from the manufacturer. © 2021 SMC Corporation All Rights Reserved. Template DKP50047-F-085MPin No. Insulation Colour Dot mark Dot colour Category Signal 1 Light brown ● Black 24 V COM+ 2 Light brown ● Red 0 V COM- 3 Yellow ● Black Pulse signal NP+ 4 Yellow ● Red Pulse signal NP- 5 Light green ● Black Pulse signal PP+ 6 Light green ● Red Pulse signal PP- 7 Grey ● Black Input SETUP 8 Grey ● Red Input RESET 9 White ● Black Input SVON 10 White ● Red Input CLR 11 Light brown ●● Black Input TL 12 Light brown ●● Red Output TLOUT 13 Yellow ●● Black Output WAREA 14 Yellow ●● Red Output BUSY 15 Light green ●● Black Output SETON 16 Light green ●● Red Output INP 17 Grey ●● Black Output SVRE 18 Grey ●● Red Output ESTOP19White ●● Black Output ALARM 20White ●● Red Output AREA。
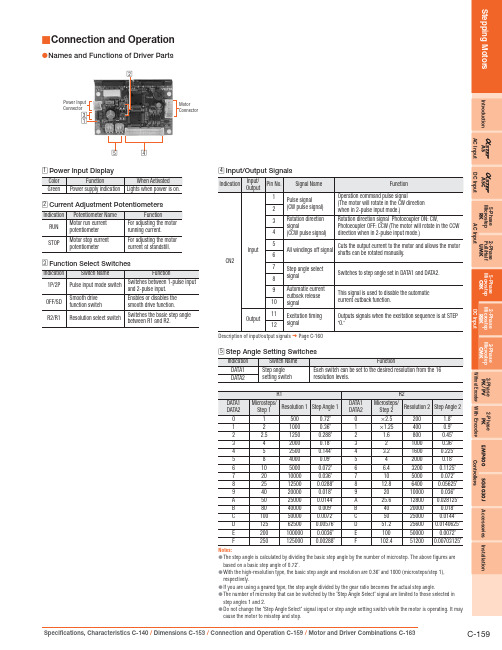
IntroductionASASC5-Phase Microstep RK 2-Phase Full/Half UMK 5-Phase Microstep CRK 2-Phase Microstep RBK 2-Phase Microstep CMK2-Phase PK/PV 2-Phase PK EMP400SG8030J Accessories Installation AC InputDC InputAC InputDC InputWithout Encoder With Encoder ControllersConnection and Operation■Names and Functions of Driver Parts●ConnectorMotorConnector□5□4124Description of input/output signals ➜ Page C-1605Notes:The step angle is calculated by dividing the basic step angle by the number of microstep. The above figures are ●based on a basic step angle of 0.72˚.With the high-resolution type, the basic step angle and resolution are 0.36˚ and 1000 (microsteps/step 1), ●respectively.If you are using a geared type, the step angle divided by the gear ratio becomes the actual step angle.●The number of microstep that can be switched by the "Step Angle Select" signal are limited to those selected in ●step angles 1 and 2.Do not change the "Step Angle Select" signal input or step angle setting switch while the motor is operating. It may ●cause the motor to misstep and stop.Connection Diagram●DriverControllerInput Signal Connection◇Signals can be connected directly when 5 VDC is supplied. If the signals are used at a voltageexceeding 5 VDC, be sure to provide an external resistor to prevent the current exceeding 20 mA from flowing. Internal components will be damaged if a voltage exceeding 5 VDC is supplied directly without using an external resistor.Example: If the voltage is 24 VDC, connect a resistor (R 1) of 1.5 to 2.2 k Ω and 0.5 W or more.Output Signal Connection◇Use output signals at 24 VDC or less and 10 mA or less.If these specifications are exceeded, the internal components may be damaged.Check the specification of the connected equipment.When the current is above 10 mA, connect an external resistor R 2.Power Supply◇Use a power supply that can supply sufficient input current. When power supply capacity is insufficient, a decrease in motor output can cause the following malfunctions:Motor does not operate properly at high-speed ●Slow motor startup and stopping●Notes on Wiring◇Use twisted-pair wires of AWG24 ●∼22 and keep wiring as short as possible [within 2 m (6.6 ft.)].Note that as the length of the pulse signal line increases, the maximum transmission frequency ●decreases. Technical reference ➜ Page F-54Use wires of AWG22 or thicker for the power supply lines. When assembling the connector, ●use the hand-operated crimp tool or the crimped driver lead wire set (sold separately). The crimp tool is not provided with the package. It must be purchased separately.Provide a minimum distance of 2 cm (0.79 in.) between the signal lines and power lines (AC ●lines, motor lines and other large-current circuits).Do not run the signal lines in the same duct as power lines or bundle them with power lines.If noise generated by the motor lead wires causes a problem, insert ferrite cores in the motor ●lead wire.Incorrect connection of DC power input will lead to driver damage. Make sure that the polarity ●is correct before turning power on.IntroductionASASC5-Phase Microstep RK 2-Phase Full/Half UMK 5-Phase Microstep CRK2-Phase Microstep RBK 2-Phase Microstep CMK2-Phase PK/PV 2-Phase PK EMP400SG8030JAccessoriesInstallationAC Input DC InputAC Input DC InputWithout Encoder With EncoderControllersStep Angle Select (C/S) Input Signal◇You may select two step angles (resolutions) from 16 available ●step angles (resolutions) with the step angle setting switches DATA1 and DATA2.When the signal is at "photocoupler OFF ," a step angle set by ●DATA1 is selected; at "photocoupler ON," DATA2 is selected.Example: Changing the step angle from 0.072˚ to 0.72˚.Step Angle Select CW Pulse MotorON OFF (DATA1)(DATA2)10 Pulses1 PulseBe sure to change step angle select inputs only when the pulse ●signals are at rest. Switching while moving may cause a positional error of the motor.When the step angle is changed by the "Step Angle Select" signal, ●the "Excitation Timing" signal output may become impossible for some combinations of step angles. When the "Excitation Timing" signal is used, adjust the number of pulses so that the motor can operate with angles that are multiples of 7.2˚.Example:After moving 9 pulses with 0.072˚/step setting, change the step angle to 0.72˚/step and move 1 pulse. In this case, "Excitation Timing" signal will not be output because the step "0" position is skipped.Operate 9 pulses with 0.072˚/step Operate 1 pulse with 0.72˚/step STEP "0""Excitation Timing" signal is only output at step "0" position.✽Automatic Current Cutback Release (C.D.INH) Input Signal ◇When this signal is in the "photocoupler ON" state, the automatic●current cutback function is disabled. When this signal is in the"photocoupler OFF" state, the automatic current cutback function will be activated after the motor stops (after approximately 100 msec).The photocoupler must be "OFF" except when the running current ●is adjusted.Excitation Timing (TIMING) Output Signal Output Circuit and Sample Connection◇The "Excitation Timing" signal is output to indicate when the motor ●excitation is in the initial stage (step "0" at power up).The "Excitation Timing" signal is output simultaneously with a ●pulse input each time the excitation sequence returns to step "0." The excitation sequence will complete one cycle for every 7.2˚ rotation of the motor output shaft.Microsteps/step 1: Signal is output once every 10 pulses. Microsteps/step 10: Signal is output once every 100 pulses.Timing chart at 0.72˚/step (Microsteps/step 1)When connected as shown in the sample connection, the signal will be "photocoupler ON" at ✽step "0."Pulse Input Rotation DirectionInputON OFF ON OFF ON OFF Excitation TimingOutput ✽Note:When power is turned ON, the excitation sequence is reset to step "0" and the "Excitation ●Timing" signal is output.Timing Chart●MotorPower Input2-Pulse Input Mode1-Pulse Input ModeRotation DirectionInput Signal Pulse Input SignalCW Pulse Input Signal CCW Pulse Input SignalAll Windings OffInput Signal Step Angle SelectInput SignalON OFF ON OFF ON OFFONOFFON OFF ON OFF ON OFFCW CCW1 ✽T he minimum switching time to change direction (1-pulse input mode), and switching time to change CW, CCW pulse (2-pulse input mode) 10 μs is shown as a response time of circuit. The motor may need more time than that.2 ✽D epends on load inertia, load torque and starting frequency.3 ✽N ever input a pulse signal immediately after switching the "All Windings Off" signal to the "photocoupler OFF" state. The motor may not start.4 ✽W ait at least 5 seconds before turning on the power again.Adjusting the Current ■Adjusting the Motor Current●Use the "RUN" potentiometer to decrease the current and suppress the temperature rise in the motor/driver, or when there is sufficient motor torque and you want to suppress vibration by lowering the current.Use the "STOP" potentiometer to readjust the current at motor standstill in relation to the holding-brake force of the motor.Factory settingsRunning current: Rated currentCurrent at motor standstill: 50% of rated currentFollow the procedure below to adjust the motor current. Connecting an Ammeter◇Connect a DC ammeter as illustrated below.Connect a DC ammeter in series to the blue motor lead wireand motor connector pin No. 1. Set all driver input signals to the "photocoupler OFF" state.Disconnect the red motor lead wire from connector pin No. 2, and black motor lead wire from connector pin No. 5.Note:Do not input pulse signals.●Electric shock may result if the red and black motor lead wires contact each other. Insulate ✽these motor lead wires to prevent electric shock.Adjusting the Motor Running Current◇To adjust the motor running current, follow the procedure below:1. S et the automatic current cutback release signal to the"photocoupler ON" state. Keep other signals in the "photocoupler OFF" state.2. Turn on the power to the driver.3. U se the "RUN" potentiometer to adjust the motor running current.4. W hen the power is turned on, the value measured by the ammeterrepresents the total current in two phases through the blue motor lead wire. The current for one phase is equivalent to one-half the ammeter value. (Example: To set the current to 1.0 A/phase, adjust the current level until the ammeter reads 2.0 A.)5. W hen the running current has been adjusted, set the automaticcurrent cutback release signal to the "photocoupler OFF" state. Notes:Be sure to use the motor at the rated current or below.●Adjusting the running current will also change the current at standstill.●Adjusting the Current at Motor Standstill◇To adjust the current at motor standstill, follow the procedure below: 1. S et the automatic current cutback release signal to the"photocoupler OFF" state. Keep other signals in the"photocoupler OFF" state.2. Turn on the power to the driver.3. U se the "STOP" potentiometer to adjust the motor current atstandstill.4. W hen the power is turned on, the value measured by the ammeterrepresents the total current in two phases through the blue motor lead wire. The current for one phase is equivalent to one-half the ammeter value. (Example: To set the current to 0.5 A/phase, adjust the current level until the ammeter reads 1.0 A.)Holding Torque[N·m (oz-in)]Maximum Holding Torque [N·m (oz-in)]×Current at Standstill[A]Motor Rated Current [A]=Notes:Always set the running current first, turn off the driver power and turn it back on, and then set ●the current at standstill. Setting the running current after current at standstill may change the current setting at standstill.Setting the current at motor standstill too low may affect the starting of the motor or the●position-holding action.。

用户手册DT5045/8080步进电机驱动器Version1.010.19系统上电前请仔细阅读手册深圳市鼎拓达机电有限公司传真:技术支持热线:*************http://*************目 录1 简介.................................................................................................................................- 3 -1.1 概述 (3)1.2 特性 (3)2 产品功能框图...................................................................................................................- 4 -3 性能指标..........................................................................................................................-4 -3.1 电气指标 (4)3.2 环境指标 (4)4 端口与接线.......................................................................................................................-5 -4.1 电源连接 (5)4.2 电机连接 (6)4.3 控制信号连接 (7)4.3.1 脉冲&方向信号............................................................................................................- 7 -4.3.2 使能信号........................................................................................................................- 7 -4.3.3 控制信号输入示例.......................................................................................................- 7 -4.3.4 报错输出接口连接.......................................................................................................- 8 -4.3.5 驱动器状态指示灯.......................................................................................................- 8 -5 驱动器运行参数设定.........................................................................................................- 8 -5.1 电流设定 (8)5.2 自动减流设定 (9)5.3 细分设定 (9)5.4 自检 (9)6 电机参数设定...................................................................................................................- 9 -7 安装...............................................................................................................................- 1 -7.1 机械尺寸 (10)7.2 驱动器安装 (10)1简介感谢您选择我司步进电机驱动器。

表中电机空载启动频率的测试条件:驱动电压为24VDC典型适配驱动器:SH-20402N SH-20403 SH-20803N-D SH-20806CN货物 编码规 格 型 号相 数 步 距 角 ( °)静态相电流 (A)相电阻(Ω)相电感(mH)保持转矩 (N ·m)定位转矩 (N ·m)空载启动 频率 (半步方式) (KHz ) 重量 (K g ) 转动 惯量(g ·cm 2)外形图000973 42BYG250A-SASSML-0151 2 0.9/1.8 1.5 1.3 2.10.230.012 1.6 0.21 38 1000974 42BYG250A-BASSML-0151 2 0.9/1.8 1.5 1.3 2.10.230.012 1.6 0.21 38 2000975 42BYG250B-SASSML-0151 2 0.9/1.8 1.5 2.1 5.00.430.015 1.5 0.23 57 1000976 42BYG250B-BASSML-0151 2 0.9/1.8 1.5 2.15.00.430.0151.5 0.23 57 2000977 42BYG250C-SASSML-0151 2 0.9/1.8 1.52.03.850.540.025 1.5 0.36 82 1000978 42BYG250C-BASSML-0151 2 0.9/1.81.52.03.850.540.0251.50.36822两相混合式步进电机 42系列技术数据绝 缘 电 阻 —— 500VDC 100M Ω Min轴 向 间 隙 —— 1mm Max 径 向 跳 动 —— 0.02mm Max 温 升 —— 65K Max 绝 缘 强 度 —— 500VAC 1Min 绝 缘 等 级 —— B 级使用环境温度—— -25℃~+40℃ 使用环境湿度—— <85%RH贮存环境温度—— -5℃~+30℃ 贮存环境湿度—— <75%RH型号说明说明:可根据客户需要进行产品定制,产品型号末尾标注Ver *.* 的表示为特殊定制品,*.*为特制版本号。

FixedSeries LEPY/LEPSSpecific Product Precautions 1Be sure to read before handling. Refer to back cover for Safety Instructions and the Operation Manual for Electric Actuator Precautions. Please download it via our website, 20C o u r t e s y o f C M A /F l o d y n e /H y d r a d y n e ŀ M o t i o n C o n t r o l ŀ H y d r a u l i c ŀ P n e u m a t i c ŀ E l e c t r i c a l ŀ M e c h a n i c a l ŀ (800) 426-5480 ŀ w w w .c m a f h .c o m7.When it is necessary to operate the product by the manual override screw, check the position of the manual override and leave necessary space for access.Do not apply excessive torque to the manual override screw. This may lead to damage and malfunction.8.When an external guide is used, connect it in such a way that no impact or load is applied to it.This may cause a malfunction due to an increase in sliding resistance, or use a freely moving connector (such as a floating joint).1.When the pushing operation is used, be sure to set to [Pushing operation].Also, do not hit the workpiece in positioning operation or in the range of positioning operation.I t may damage and malfunction. If the operation is interrupted or stopped during the cycle: W hen the pushing operation command is output immediately after restarting the operation, the direction of movement depends on the position of restart.e the product within the specified pushing speed range for the pushing operation.It may lead to damage and malfunction.3.For the pushing operation, ensure that the force is applied in the direction of the rod axis.4.The moving force should be the initial value.If the moving force is set below the initial value, it may cause an alarm.5.The actual speed of this actuator is affected by the load.Check the model selection section of the catalog.6.Do not scratch or dent the sliding parts of the rod, by striking or attaching objects.The rod is manufactured to precise tolerances, even a slight deformation may cause malfunction.7.Avoid using the electric actuator in such a way that rotational torque would be applied to the rod.It may cause deformation of the non-rotating sliding part, leading to clearance in the internal guide or an increase in the sliding resistance.Refer to the table below for the approximate values of the allowable range of rotational torque.HandlingCautionMountingWarningSide mounting (Body mounting through-hole)Side mounting (Body tapped)Bottom mounting (Body tapped)Rod side mounting (Rod type only)6.Tighten the mounting screws within the specified torque range.Tightening with higher torque than the specified range may cause malfunction while the tightening with lower torque can cause the displacement of gripping position or dropping a workpiece.Series LEPY/LEPSSpecific Product Precautions 2Be sure to read before handling. Refer to back cover for Safety Instructions and the Operation Manual for Electric Actuator Precautions. Please download it via our website, 21C o u r t e s y o f C M A /F l o d y n e /H y d r a d y n e ŀ M o t i o n C o n t r o l ŀ H y d r a u l i c ŀ P n e u m a t i c ŀ E l e c t r i c a l ŀ M e c h a n i c a l ŀ (800) 426-5480 ŀ w w w .c m a f h .c o mHandlingCaution13.In pushing operation, set the product to a position of atleast 0.5 mm away from a workpiece. (T his position is referred to as a pushing start position.)The following alarms may be generated and operation may become unstable.a. “Posn failed” alarm is generated.The product cannot reach a pushing start position due to variation in the width of workpieces.b. “Pushing ALM” alarm is generated.The product is pushed back from a pushing start position after starting to push.c. “Deviation over flow” alarm is generated.Displacement exceeding the specified value is generated at the pushing start position.14.For the pushing operation, use the product within theduty ratio range below.The duty ratio is a ratio at the time that can keep being pushed.15.When mounting the product, keep a 40 mm or longerdiameter for bends in the cable.MaintenanceWarning1.Ensure that the power supply is stopped and the workpiece is removed before starting maintenance work or replacement of the product.8.Do not operate by fixing the rod and moving the actuatorbody.Excessive load will be applied to the rod, leading to damage to the actuator and reduced the life of the product.9.Return to origin1)Do not apply a load, impact or resistance in addition to the transferred load during return to origin.Additional force will cause the displacement of the origin position since it is based on detected motor torque.2)W hen the return to origin is set with <Basic parameter> [Origin offset], it is necessary to change the current position of the product. Recheck the value of step data.3)It is recommended to set the directions of return to origin and pushing in the same direction in order to enhance the measurement accuracy during pushing operation.10.There is no backlash effect in pushing operation.The return to origin is done by the pushing operation.The position can be displaced by the effect of the backlash during the positioning operation.Take the backlash into consideration when setting the position.11.Do not hit the stroke end except during return to origin.This may damage the inner parts.12.INP output signal1) Positioning operationW hen the product comes within the set range by step data [In position], the INP output signal will turn on.Initial value: Set to [0.50] or higher.2)Pushing operationW hen the effective pushing force exceeds the step data [Trigger LV], the INP output signal will turn on.W hen [Pushing force] setting and [Trigger LV] are set less than [Pushing force], use the product within the specified range of[Pushing force] and [Trigger LV].a)To ensure that the actuator pushes the workpiece with the set [Pushing force], it is recommended that the [Trigger LV]be set to the same value as the [Pushing force].b)If the [Trigger LV] is set lower than the [operation pushing force (current pushing force) for the pushing operation], the pushing force will exceed the trigger LV from the pushing start position and the INP output signal will turn on before pushing the workpiece. Increase the pushing force, or change the work load so that the current pushing force becomes smaller than the trigger LV.Series LEPY/LEPSSpecific Product Precautions 3Be sure to read before handling. Refer to back cover for Safety Instructions and the Operation Manual for Electric Actuator Precautions. Please download it via our website, 22C o u r t e s y o f C M A /F l o d y n e /H y d r a d y n e ŀ M o t i o n C o n t r o l ŀ H y d r a u l i c ŀ P n e u m a t i c ŀ E l e c t r i c a l ŀ M e c h a n i c a l ŀ (800) 426-5480 ŀ w w w .c m a f h .c o m。
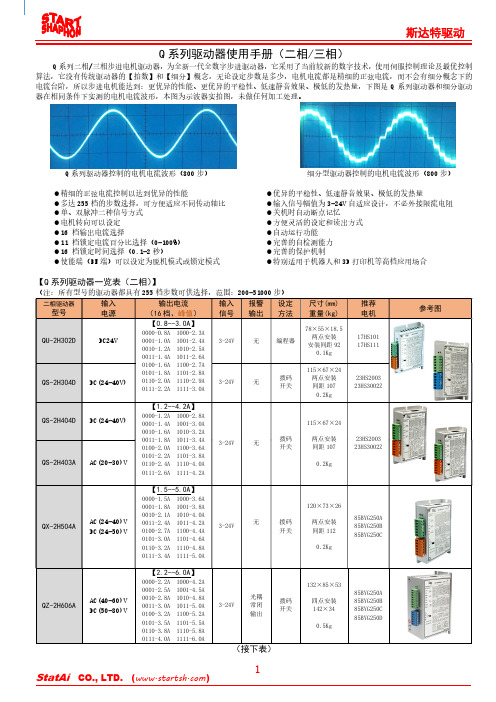
Q 系列二相/三相步进电机驱动器,为全新一代全数字步进驱动器,它采用了当前较新的数字技术,使用伺服控制理论及最优控制电流台阶,所以步进电机能达到:更优异的性能、更优异的平稳性、低速静音效果、极低的发热量,下图是Q 系列驱动器和细分驱动Q 系列驱动器使用手册(二相/三相)算法,它没有传统驱动器的【拍数】和【细分】概念,无论设定步数是多少,电机电流都是精细的正弦电流,而不会有细分概念下的器在相同条件下实测的电机电流波形,本图为示波器实拍图,未做任何加工处理。
Q 系列驱动器控制的电机电流波形(800步) 细分型驱动器控制的电机电流波形(800步)精细的正弦电流控制以达到优异的性能 优异的平稳性、低速静音效果、极低的发热量 多达255档的步数选择,可方便适应不同传动轴比 输入信号幅值为3-24V 自适应设计,不必外接限流电阻 单、双脉冲二种信号方式 关机时自动断点记忆 电机转向可以设定 方便灵活的设定和读出方式 16 档输出电流选择 自动运行功能 11 档锁定电流百分比选择(0-100%) 完善的自检测能力 16 档锁定时间选择(0.1-2秒) 完善的保护机制 使能端(EN 端)可以设定为脱机模式或锁定模式 特别适用于机器人和3D 打印机等高档应用场合【Q 系列驱动器一览表(二相)】(注:所有型号的驱动器都具有255档步数可供选择,范围:200-51000步)(接上表)【Q系列驱动器一览表(三相)】(注:所有型号的驱动器都具有255档步数可供选择,范围:200-51000步) 完全相同,但体积减小便于安装、信号连接方便、有更好的性价比。
此驱动器和本公司切割机控制系统完美结合,驱动器无拨码开关,其参数在系统内设定,驱动器的运行状态被系统时时监测且用于控制。
输入电源:AC(40-70)V,输出电流:2.2-6.0A,机身尺寸:192×120×56,四点安装:302×37,重量:1.0Kg。