多传感器数据融合在飞机地面防撞中的应用
- 格式:pdf
- 大小:246.71 KB
- 文档页数:3

飞行控制系统中的传感器融合技术研究近年来,随着对航空安全性和航空器性能提升的要求越来越高,飞行控制系统的技术得到了前所未有的发展。
其中,传感器融合技术作为飞行控制系统中的一个重要部分,起到了至关重要的作用。
一、传感器融合技术的基本原理传感器融合技术是将多种不同类型的传感器数据整合起来,并通过数据处理和算法优化实现对目标识别、跟踪和控制等过程的优化。
传感器融合技术的最终目的是提高系统的准确性、可靠性、可用性和实时性。
二、传感器融合技术在飞行控制系统中的应用传感器融合技术在飞行控制系统中有着广泛的应用。
对于民用飞机来说,传感器融合技术可以实现对飞机高度、速度、姿态等状态信息的实时监测和反馈,同时对飞机的飞行轨迹进行跟踪和控制,提高了飞行安全性和稳定性。
对于军用飞机来说,传感器融合技术可以帮助飞行员实现对目标的快速识别和跟踪,提高战斗机的作战效能和任务完成率。
除此之外,传感器融合技术还可以用于无人机、导弹和火箭等飞行器的控制和指导,为军事和民用领域提供了极大的便利和优势。
三、传感器融合技术的发展趋势随着信息技术和人工智能的不断发展,传感器融合技术也将迎来新的发展机遇。
未来的传感器融合技术将更加注重数据的全面性和精确性,采用更为高效的算法和模型优化方法,实现更加精准的目标识别和跟踪。
在智能化发展的背景下,传感器融合技术还将结合机器学习、深度学习等技术,实现飞行控制系统的可自主学习和自适应控制,提高系统的适应性和鲁棒性,进一步提升飞行安全性和操作效率。
总之,传感器融合技术在飞行控制系统中具有重要的地位和作用,它的不断发展和优化将继续为航空事业的发展打下坚实的基础。

多传感器融合技术在海上防撞导航设备中的应用摘要:海上导航事关人员和货物的安全,因此,防撞导航设备的准确性和可靠性至关重要。
多传感器融合技术在海上防撞导航设备中的应用极大地提高了导航的安全性和效率。
本文将讨论多传感器融合技术在海上防撞导航设备中的作用,并对其优势和未来发展进行探讨。
1. 引言海上交通日益繁忙,能够提供准确导航和防撞功能的设备变得尤为重要。
传统的导航设备存在精度和实时性方面的缺陷。
为了克服这些问题,多传感器融合技术开始应用于海上防撞导航设备中。
2. 多传感器融合技术概述多传感器融合技术是将多个传感器的数据进行整合和分析,从而得出更准确和可靠的导航信息。
传感器可以包括雷达、卫星导航系统、自动识别系统(AIS)以及摄像头等。
通过融合这些多源数据,可以提供更全面和实时的导航信息。
3. 多传感器融合技术在海上防撞导航设备中的作用3.1 精确定位和船舶识别传统的GPS导航系统存在精度问题,尤其在密集水域和恶劣天气条件下。
多传感器融合技术可以通过整合GPS、卫星导航系统和其他传感器的数据,提供更精确的位置信息。
此外,多传感器融合技术还可以识别和跟踪附近船舶的位置和行驶路径,以避免碰撞事故的发生。
3.2 障碍物检测和避免多传感器融合技术还可以通过图像处理技术和雷达数据分析,实时监测和识别周围水域的障碍物,如其他船只、岛屿、礁石等。
当检测到障碍物时,系统会自动发出警报,提醒船员采取避免措施,以防止潜在的碰撞事件。
3.3 海上交通监控和预警系统多传感器融合技术可以结合自动识别系统(AIS)数据和雷达图像,提供实时的海上交通监控和预警系统。
通过分析船舶的航向、速度和预计交叉路线,系统可以及时预警可能发生的碰撞情况,并向船舶发送警报信息。
4. 多传感器融合技术的优势4.1 提高导航的准确性和可靠性多传感器融合技术通过整合多源数据,可以提供更准确和可靠的导航信息,使船舶能够更精确地确定自身位置和周围环境情况,从而避免碰撞和降低事故发生的风险。

多传感器信息融合及其运用多传感器信息融合是指利用多个传感器获取的信息来提取并融合目标的各方面特征,从而实现对目标的更准确、全面的感知和认知。
随着传感器技术的不断发展和成熟,多传感器信息融合在各领域的应用越来越广泛,尤其在军事、航天、无人驾驶、智能机器人等领域具有重要的应用价值。
多传感器信息融合的基本思想是通过将多传感器获取的信息交互、互补和整合,得到比单一传感器更可靠和准确的信息。
传感器的种类很多,包括视觉传感器、声音传感器、红外传感器、雷达传感器等等。
不同传感器对同一目标的感知具有各自的特点和优势,通过将这些传感器的信息进行融合,能够弥补各自的不足,提高目标感知的准确性和鲁棒性。
多传感器信息融合的方法有很多种,常用的包括基于模型的融合方法、基于贝叶斯理论的融合方法、基于滤波器的融合方法等。
这些方法主要通过建立数学模型或概率模型,将传感器的信息进行融合,并得出目标的估计值或状态值。
基于滤波器的融合方法是一种常用且有效的方法,如卡尔曼滤波器、粒子滤波器等。
多传感器信息融合在军事领域具有重要的应用价值。
军事装备中常用多种传感器进行目标侦测、识别、跟踪等任务,如雷达、红外传感器、光学传感器等。
将这些传感器的信息进行融合,能够提高目标的识别性能、跟踪精度和抗干扰能力,提升战场态势感知的水平。
多传感器信息融合在无人驾驶领域也有广泛的应用。
无人驾驶汽车依赖于多个传感器来感知车辆周围的环境和交通状况,包括激光雷达、摄像头、超声波传感器等。
将这些传感器的信息进行融合,能够实现对交通标志、行人、车辆等的准确感知和判断,并做出相应的决策和控制,确保行驶的安全性和可靠性。
智能机器人领域也是多传感器信息融合的重要应用领域之一。
智能机器人常用多传感器来感知环境、获取目标信息和执行任务,如摄像头、声音传感器、接触传感器等。
将这些传感器的信息进行融合,能够实现对环境的三维建模、目标的感知和定位、路径规划和导航等功能,提高机器人的智能化水平和执行任务的效率。

多传感器融合在航空航天系统中的应用研究一直是航空航天领域的一个重要课题。
随着航空航天技术的不断发展和进步,传感器技术的应用也变得越来越广泛。
传感器在航空航天系统中的作用不仅仅是提供数据,更重要的是通过对多个传感器数据的融合,可以提高系统的性能和准确性。
因此,多传感器融合技术在航空航天系统中的应用研究具有重要意义。
在航空航天系统中,传感器起着至关重要的作用。
传感器是指一种能够感知并采集某种信息的装置,如温度传感器、压力传感器等。
在航空航天系统中,各种传感器可以用于监测飞行器的各种参数,如速度、高度、姿态角等。
然而,由于单一传感器的限制,往往无法满足系统的需求。
因此,多传感器融合技术应运而生。
多传感器融合技术是指通过整合多个传感器的数据,利用数据融合算法,得到更加准确和可靠的信息。
在航空航天系统中,多传感器融合技术可以帮助系统实现自主导航、目标跟踪、环境感知等功能。
通过多传感器融合,系统可以减少不确定性,提高预测精度,增强抗干扰能力,提高系统的稳定性和可靠性。
多传感器融合技术在航空航天系统中的应用非常广泛。
在飞行器导航系统中,多传感器融合可以通过融合GPS、惯性导航系统、气压计等传感器的数据,实现对飞行器位置、速度等参数的准确测量。
在飞行器目标识别系统中,多传感器融合可以通过融合红外传感器、雷达传感器等的数据,实现对目标的有效跟踪和识别。
在航空航天系统的环境感知中,多传感器融合可以通过融合气象雷达、光学传感器等的数据,实现对环境的全面监测。
多传感器融合技术在航空航天系统中的应用不仅可以提高系统性能,还可以降低系统的成本。
通过合理设计多传感器融合系统,可以减少不必要的传感器重复、降低传感器的功耗、提高系统的效率。
此外,多传感器融合技术还可以增强系统的抗干扰能力,提高系统的应对复杂环境的能力。
在实际应用中,多传感器融合技术还面临一些挑战。
如何选择合适的传感器,如何设计有效的数据融合算法,如何准确估计传感器误差和不确定性等都是需要研究和解决的问题。

多传感器数据融合技术在航空安全监测中的应用随着民航运输在我国不断发展,航空安全事故的预防和控制问题越来越受到广泛关注。
而多传感器数据融合技术在航空安全监测中的应用也逐渐得到人们的认可和重视。
本文将从多传感器数据融合技术的概念、原理,以及在航空安全监测中的应用等方面加以探讨。
一、多传感器数据融合技术的概念传感器是一种能够感知并反馈环境信息的设备,例如摄像头、声音传感器、温度传感器等。
多传感器数据融合技术是指利用多种不同的传感器来获取样本数据,并通过融合方法将多个传感器数据综合起来,得到更全面、更准确、更稳定的信息。
二、多传感器数据融合技术的原理多传感器数据融合技术的原理是基于“多个观测角度可以提供更全面、更准确的信息”这一原则,将多个传感器的数据融合起来,以期实现信息的互补、补偿,达到更全面、更准确、更稳定的结论。
多传感器技术实现的核心是数据融合,数据融合实现的方法包括多传感器信息融合和多传感器决策融合。
多传感器信息融合通常需要对各个传感器采集数据进行预处理、数据过滤、特征提取、特征选择等操作。
在多传感器信息融合推理阶段,通常采用贝叶斯概率论方法来进行数据融合,得到综合判断信息。
多传感器决策融合则是将已经处理后的各个传感器的决策结果进行融合,产生最终的决策结果。
三、多传感器数据融合技术在航空安全监测中的应用已经形成了一整套成熟的方案和工作流程,主要体现在以下方面:1. 飞机监控多传感器数据融合技术可以用于飞机与地面监控系统的集成,收集飞行过程中的各种传感器数据进行分析和处理,以获取更全面、准确的飞行信息,预测可能发生的问题,并提出相应的解决方案。
2. 气象预警多传感器数据融合技术可以对多项气象数据进行分析和处理,提供更准确的天气预报和预警信息,为机场空管、飞行员和机务人员提供参考。
3. 航空交通管制多传感器数据融合技术可以对多个传感器提供的飞行数据进行融合,为航空交通管制提供更全面、准确的航班信息,以协调各种航班的起飞降落,保证航班的安全运营。

多传感器融合技术在航空制导中的应用多传感器融合技术指的是利用多个传感器从不同角度对同一对象进行监测,并将不同传感器获取的信息融合在一起,从而提高对目标的感知能力和定位精度。
在航空制导领域,多传感器融合技术具有重要的应用价值。
传统的航空导航系统采用GPS等全球导航卫星系统进行位置定位,在晴朗天气条件下定位精度较高,但在城市峡谷、山区、建筑密集区域等信号遮蔽环境下,GPS的定位精度下降,甚至会出现定位失败。
因此,需要利用其他传感器来进行辅助定位。
首先,惯性测量单元(IMU)可以对航空器进行姿态、加速度、角速度等参数的测量。
IMU可以提供高频率、高精度、低时延的数据信息,因此可以用于判断平台姿态状态和位置信息,并且可以校正GPS信号的时间延迟和漂移误差。
其次,雷达传感器可以进行距离、速度和角度的测量。
这些信息有助于确定目标在空间中的位置和运动状态,同时也可以进行目标识别和跟踪。
因为雷达信号可以穿过云层和雨雾,因此在天气复杂的环境下也可以进行可靠的检测。
再次,光学传感器(如相机和激光雷达)可以进行高精度的三维空间重建。
相机可以利用双目或多目测量技术确定目标的视角和距离,从而实现精确的目标追踪;激光雷达可以进行高精度的三维点云测量,获取目标的形状、位置和方向信息。
另外,地磁、气压、温度等传感器也可以提供多样化的信息,用于环境状态的监测和校正。
多传感器融合技术将不同传感器获得的信息整合在一起,可以消除各传感器单独存在的噪声和误差,提高感知精度和稳定性。
同时,多传感器融合可以更好地应对复杂的环境和多重干扰,确保导航系统的高鲁棒性和实时性。
航空器的导航定位精度、精准自主驾驶以及自适应运动控制等方面都可以得到显著提升。
总之,多传感器融合技术在航空制导中的应用已初步展现出巨大的潜力。
随着传感器技术和算法的不断发展,其应用前景也将越来越广阔,为航空领域的创新和发展带来新的机遇和挑战。


航空器的多传感器数据处理与融合在现代航空领域,航空器的安全、高效运行离不开先进的技术支持。
多传感器数据处理与融合技术便是其中至关重要的一环。
它就像航空器的“智慧大脑”,能够将来自多个传感器的信息进行整合、分析和处理,为飞行员和地面控制人员提供准确、全面、及时的态势感知,从而保障飞行安全,提高飞行效率。
要理解航空器的多传感器数据处理与融合,首先得知道航空器上都有哪些传感器。
常见的航空器传感器包括但不限于惯性导航系统、全球定位系统(GPS)、气象雷达、气压高度计、空速传感器、姿态传感器等等。
这些传感器各自承担着不同的测量任务,为航空器提供了丰富的飞行状态和环境信息。
惯性导航系统是航空器内部的一种重要传感器,它通过测量加速度和角速度来计算航空器的位置、速度和姿态。
然而,惯性导航系统存在着误差累积的问题,随着时间的推移,其测量结果的准确性会逐渐降低。
GPS 则是通过接收卫星信号来确定航空器的位置和速度,具有高精度和全球性覆盖的优点。
但 GPS 信号容易受到干扰,比如在山区、高楼林立的城市或者恶劣天气条件下,可能会出现信号丢失或不准确的情况。
气象雷达能够探测前方的气象状况,帮助飞行员提前避开危险的气象区域。
气压高度计通过测量大气压力来计算航空器的飞行高度,空速传感器则用于测量航空器相对于空气的速度。
姿态传感器则负责监测航空器的俯仰、滚转和偏航角度。
这么多传感器各自为政可不行,这就需要多传感器数据处理与融合技术来发挥作用了。
多传感器数据处理与融合的过程就像是一场精心编排的“信息交响乐”。
首先,各个传感器采集到的数据会被进行预处理,这包括去除噪声、校准和转换等操作,以确保数据的质量和准确性。
接下来,就是数据融合的关键步骤。
数据融合的方法有很多种,比如卡尔曼滤波、贝叶斯估计、加权平均等等。
以卡尔曼滤波为例,它能够根据传感器的测量误差和历史数据,对当前的状态进行最优估计。
通过不断地更新和修正,融合后的结果能够更加准确地反映航空器的真实状态。

航空航天系统多传感器数据融合技术研究作为航空航天系统中的关键技术之一,多传感器数据融合技术在现代飞行器的设计、实时控制和智能决策中起到了重要作用。
利用多传感器数据融合技术,可以将来自不同传感器的数据进行集成、校正和解释,提高系统的性能、准确性和可靠性。
本文将介绍航空航天系统中多传感器数据融合技术的研究进展和应用案例,以及所面临的挑战和未来发展方向。
首先,我们需要了解什么是多传感器数据融合技术。
多传感器数据融合技术是指将来自不同传感器的数据进行集成,以获得更准确、全面和可靠的信息。
航空航天系统中常见的传感器包括雷达、光电传感器、惯性导航系统等。
这些传感器可以提供不同类型的数据,如位置、速度、距离、温度等。
多传感器数据融合技术通过集成和处理这些数据,提供更全面、准确的信息,帮助飞行器实现精确的导航、目标识别和环境感知等功能。
在航空航天系统中,多传感器数据融合技术的应用非常广泛。
首先,它可以提高导航系统的精度和可靠性。
传统的导航系统常常只依赖于单一传感器的数据,其精度和可靠性受到限制。
而多传感器数据融合技术可以结合多个传感器的信息,通过滤波、融合和校正等算法,提高导航系统的精度和可靠性,从而降低飞行器的导航误差。
其次,多传感器数据融合技术在目标识别和追踪中也起到重要作用。
航空航天系统需要准确地识别和追踪空中或地面上的目标。
传统的目标识别和追踪系统通常只依赖于单一传感器的数据,容易受到环境干扰和噪声的影响。
而多传感器数据融合技术可以结合多个传感器的信息,通过特征提取、分类和联合概率推理等算法,提高目标识别和追踪的准确性和鲁棒性。
此外,多传感器数据融合技术还可以改善飞行器的环境感知和障碍物避障能力。
在航空航天系统中,准确地感知和理解周围的环境是保证飞行安全的关键。
多传感器数据融合技术可以结合多个传感器的信息,生成更准确、全面的环境地图,并利用这些信息进行路径规划和障碍物避障。
通过多传感器数据融合技术,飞行器可以更好地应对复杂的环境和任务要求,提高飞行安全性和效率。
飞行器的多传感器数据融合技术在现代航空航天领域,飞行器的性能和安全性要求越来越高,多传感器数据融合技术应运而生。
这项技术就像是给飞行器装上了一双更加敏锐和全面的“眼睛”,让其能够在复杂的环境中更加稳定、高效地飞行。
想象一下,飞行器在飞行过程中,会有各种各样的传感器在同时工作。
比如,有测量速度的传感器、测量高度的传感器、测量姿态的传感器,还有测量周围环境的传感器等等。
这些传感器就像一个个独立的信息源,它们各自获取着不同但又相关的数据。
然而,如果只是单纯地依赖某一个传感器的数据,就可能会出现偏差或者不全面的情况。
这时候,多传感器数据融合技术就发挥了关键作用。
多传感器数据融合技术的核心目标是将来自多个传感器的信息进行整合和处理,以获得更准确、更完整、更可靠的关于飞行器状态和周围环境的认知。
通过这种融合,可以有效地弥补单个传感器的局限性,提高整个系统的性能和可靠性。
为了更好地理解多传感器数据融合技术,我们可以把它类比成一个拼图游戏。
每个传感器获取的数据就像是一块拼图,单独看每一块可能不太能看出全貌,但当把所有的拼图块按照正确的方式拼接在一起时,一幅清晰完整的画面就呈现出来了。
在飞行器中,这个“拼接”的过程是通过一系列复杂的算法和数学模型来实现的。
在实际应用中,多传感器数据融合技术通常分为三个层次:数据级融合、特征级融合和决策级融合。
数据级融合是最底层也是最直接的融合方式。
在这个层次,直接将各个传感器获取的原始数据进行组合和处理。
就好像把一堆未经加工的原材料直接混合在一起,然后进行统一的加工处理。
这种融合方式能够最大程度地保留原始数据的细节,但同时也需要处理大量的数据,计算量较大。
特征级融合则是在数据级融合的基础上,先对各个传感器的数据进行特征提取,然后再将这些特征进行融合。
这就好比先从原材料中提取出关键的特征部分,然后再把这些特征组合起来。
这样可以减少数据量,提高处理效率,但也可能会在特征提取的过程中丢失一些有用的信息。

多传感器信息融合技术的作用
多传感器信息融合技术是一种将多个传感器采集的数据进行集成、分析和处理的技术。
它可以将多个传感器的数据进行合并,从而提高系统的可靠性和准确性。
该技术在军事、航空、医疗和工业等领域得到了广泛应用。
在军事领域,多传感器信息融合技术可以帮助军队进行情报搜集和目标跟踪。
通过融合多个传感器的数据,可以提高情报收集的准确性和及时性,从而为军队的作战决策提供有力支持。
在航空领域,多传感器信息融合技术可以帮助飞行员更好地了解飞行环境,提高飞行安全。
例如,在飞机上安装多个传感器可以提高飞机的自主导航能力,减少对地面导航站的依赖。
在医疗领域,多传感器信息融合技术可以帮助医生更好地了解病情,提高诊断准确性。
例如,通过使用多个生物传感器可以同时监测多项生理指标,从而更全面地了解病人的健康状况。
在工业领域,多传感器信息融合技术可以帮助企业进行智能化生产。
例如,在生产线上安装多个传感器可以实时监测生产过程中的各项指标,从而及时发现并解决问题,提高生产效率和产品质量。
总之,多传感器信息融合技术的作用是多方面的,它可以提高系统的可靠性、准确性和效率,为各行各业提供有力支持。
- 1 -。

航空航天系统中的多传感器融合技术研究随着科技的不断发展,现代化的航空航天系统中,各种传感器的种类越来越多,可以应用的场景也越来越广泛。
但是,每种传感器都有其自身的优势和缺点,而使用多种传感器进行检测,可以弥补单一传感器的缺陷,提高系统的性能和鲁棒性。
此时,融合多个传感器来实现目标检测与跟踪,就成为了航空航天系统中的重要问题之一——多传感器融合技术。
从简单的控制系统到现代化的航空航天系统,多传感器融合技术的应用越来越广泛。
多传感器融合技术可以通过将不同传感器的信息融合起来,从而得到更加准确、完整的目标信息。
这种融合技术不仅可以实现在遥感卫星、无人机等上,也可以应用于机器人、医疗设备、智能家居等领域。
多传感器融合技术的目的是将来自不同传感器的数据进行整合,并通过算法获得更准确、更稳定的测量结果。
该技术的应用领域范围广泛,从早期的火力控制和雷达系统,到现代化的搜索和救援设备以及无人机等。
多传感器融合技术的主要优点是能够实现目标的高精度定位、跟踪和识别,从而提高整个系统在复杂环境下的鲁棒性和可靠性。
一、多传感器融合技术的分类多传感器融合技术按照数据融合的方式,可以分为基于信息的融合和基于数据的融合。
基于信息的融合技术是指将来自不同传感器的感知信息转化为相同的主题,使其互相补充,从而获得更准确的信息。
基于数据的融合技术是指将来自不同传感器的数据打包成一个整体,并对其进行处理和分析,以得出更具可信度的测量数据。
此外,多传感器融合技术还可以按照其架构分为闭环系统和开环系统。
闭环系统是指将感知信息与控制系统紧密连接,控制系统通过反馈和前馈控制技术将感知信息进行调整与校正,实现控制目标的准确性和精确性。
开环系统则是指感知信息与控制系统之间的信息传输是单向的,控制系统无法对传统信息进行调整和校正,就算传感器输出的信息存在误差也无法进行修正。
二、多传感器融合技术的应用多传感器融合技术广泛应用于航空航天系统中。
其中,目标跟踪和导航控制是应用最为广泛的两个领域。
用于航空领域的多源传感器数据融合技术分析在航空领域,多源传感器数据融合技术是一种关键的技术,可以显著提高飞行器的感知能力和情报处理能力,以及提高飞行安全性和效率。
本文将对用于航空领域的多源传感器数据融合技术进行详细分析。
多源传感器数据融合技术是通过将来自不同传感器的数据进行有效集成和利用,从而获取更为准确和全面的信息。
在航空领域中,利用多种类型的传感器,如雷达、红外、光学、声音等,可以实现对飞行器周边环境的全面感知和监测。
然而,单一传感器的数据容易受到噪声、干扰等因素的影响,而多源传感器数据融合技术可以通过综合各传感器的数据来弥补单一传感器的不足,提高信息的可靠性、精确性和鲁棒性。
首先,多源传感器数据融合技术在航空领域中有助于实现目标检测与跟踪。
通过将来自不同传感器的信息融合,可以提高飞行器对目标的检测率和准确率。
例如,将雷达和红外传感器的数据融合,可以在任何天气条件下都能有效地检测到目标,并且可以准确地跟踪目标的位置和运动轨迹,为飞行器提供准确的导航和避障信息。
其次,多源传感器数据融合技术可以提高航空领域的环境感知能力。
通过将不同传感器的数据融合,在复杂的环境中可以更全面、准确地感知到飞行器周围的障碍物、地形、气象等信息。
例如,利用多源传感器数据融合技术可以实现对飞行器周边的地形、障碍物和气象的全面感知,并且可以实时监测和预警飞行器可能遇到的风险和危险情况,提高飞行安全性。
此外,多源传感器数据融合技术还可以提高飞行器的自适应与决策能力。
通过将来自不同传感器的数据融合,可以实现对飞行器状态的实时监测与分析,包括姿态、速度、位置等方面。
基于这些信息,飞行器可以根据当前环境的变化做出相应的决策和调整,提高飞行器在不同复杂任务中的自适应能力。
例如,在飞行过程中,通过综合多种传感器的数据,飞行器可以实时调整飞行姿态,确保航线的稳定和安全。
最后,多源传感器数据融合技术还可以提高航空领域中的目标识别和特征提取能力。
多传感器融合技术在航空器故障诊断中的应用随着科技的不断进步与应用,多传感器融合技术在航空器故障诊断中得到了越来越广泛的应用。
航空器是一种高度复杂的系统,其安全性和可靠性非常重要。
而多传感器融合技术可以提高航空器故障诊断的准确度和效率,降低事故发生的风险。
本文将介绍多传感器融合技术的基本原理和在航空器故障诊断中的应用。
一、多传感器融合技术的基本原理多传感器融合技术是指将多个传感器所获取的数据进行综合分析和处理,以提高诊断结果的准确性和鲁棒性。
传统的单一传感器在诊断过程中往往存在着许多的限制和误差,因此无法充分地反映系统的真实状况。
而通过多传感器融合技术,可以有效地弥补单一传感器的不足之处,提高诊断的可靠度和精度。
多传感器融合技术主要包括以下几个方面:1. 数据融合:将多个传感器所采集的数据进行汇总和综合,得到更为全面和准确的诊断结果。
2. 特征融合:将多个特征量进行综合和分析,得到更为全面和准确的系统特征。
3. 决策融合:将多个决策结果进行综合和分析,得到更为可靠和准确的判断。
通过多传感器融合技术,可以与传统的单一传感器相比,提高系统的灵敏度和可靠度,并有效地降低了系统的误判率和漏诊率。
二、多传感器融合技术在航空器故障诊断中的应用1. 航空器结构故障诊断在航空器的运行过程中,往往会出现各种各样的故障,而结构故障是比较常见的一种。
传统的故障诊断方法主要是依靠经验和人工的判断,存在着误判和漏诊的风险。
而多传感器融合技术可以将多种故障诊断方法进行整合和优化,提高系统的灵敏度和准确性,同时大大降低了误判率和漏诊率。
2. 航空器电子故障诊断航空器的电子系统是航空器运行的重要组成部分。
传统的电子故障诊断方法通常需要依靠人工的排查,需要消耗大量的时间和精力,同时也存在着漏诊和误判的风险。
而多传感器融合技术可以将多个传感器进行综合和分析,快速地定位故障原因并提供精确的解决方案。
3. 航空器降落轮故障诊断降落轮是航空器起降过程中必不可少的部分,其故障会直接影响航空器的运行安全。

基于多传感器信息融合的飞机防撞系统近年来,民航交通需求日益增加,伴随着航班密度的增加,防止飞机碰撞已成为确保民航安全的一项重要任务。
目前,尽管各航空公司和航空港已建立了各种各样的信息系统,但由于系统设计时缺乏统一全面的规划,造成对同一信息目标,各信息系统之间纯在着信息不完全、信息不一致、甚至信息相悖的问题。
使得目前飞机作业系统的信息不通畅,这样使机场管理层缺少对信息目标的全面、准确把握,缺少对异常事件的及时应变能力。
多传感器信息融合是利用计算机技术将来自多个传感器或多源的观测信息进行分析、综合处理,从而得出决策和估计任务所需的信息的处理过程。
它具有可靠性强、覆盖范围广、可信度高、反应速度快等特点。
本文侧重研究了信息融合技术在飞机防撞系统中的应用。
采用多传感器信息融合,充分利用多传感器的优点来弥补单一传感器的不足。
1 多传感器信息融合信息融合最早用于军事领域,是一个处理探测、互联、评估以及组合多源信息和数据的多层次、多方面的过程。
自20世纪80年代中期以来,多传感器数据融合技术(MSDF)成为处理大量数据和决策支持的有力方法。
数据融合集成了传统的学科和该领域新的技术,学科包括计算机科学、专家系统、决策论、认识论、概率论、数字信号处理、模糊逻辑和神经网络等。
数据融合的最终目的是为人的决策提供支持。
对决策过程的支持程度大小可以作为判定数据融合系统好坏的标准。
如图1所示,信息融合相对于信息表征的层次可分为数据层信息融合、特征层信息融合和决策层信息融合。
数据层信息融合是指对匹配的采集数据进行融合,并对融合的数据进行特征提取和状态(属性)说明;特征层信息融合属于中间层次,是特征层联合识别,在融合前,融合系统首先对原始信息进行特征提取,把原始输入数据变换成统一的数据表达形式(即具有相同的数据结构),然后对特征信息进行综合分析与处理;决策层信息融合是高层次融合,充分利用特征层融合对象的各类特征信息,并增加了人的参与因素(专家经验),采用适当的融合技术来实现,决策层融合是融合的最终结果,其目的是为控制决策提供依据,融合结果直接影响决策水平。

飞行器的多传感器融合与应用在现代航空航天领域,飞行器的性能和安全性不断追求卓越,多传感器融合技术应运而生,并在飞行器的设计、控制和运行中发挥着至关重要的作用。
多传感器融合,简单来说,就是将来自多个不同传感器的数据整合在一起,以获取更全面、准确和可靠的信息。
这些传感器就像是飞行器的“眼睛”和“耳朵”,它们各自有着独特的功能和特点,但单独使用时都存在一定的局限性。
例如,惯性导航系统能够提供连续的位置、速度和姿态信息,但随着时间的推移会产生累积误差;而全球定位系统(GPS)能够提供高精度的位置信息,但在信号受到干扰或遮挡的情况下可能会失效。
通过将这些传感器的数据融合,就能够取长补短,实现更优的性能。
在飞行器中,常见的传感器类型包括惯性传感器(如加速度计和陀螺仪)、卫星导航传感器(如GPS 和北斗)、气压高度计、磁传感器、视觉传感器(如摄像头)等等。
每种传感器都有其特定的测量原理和适用范围。
惯性传感器是飞行器中最基本的传感器之一,它们能够实时测量飞行器的加速度和角速度。
通过对这些数据进行积分运算,可以推算出飞行器的位置和姿态。
然而,由于积分过程中的误差积累,惯性传感器的测量结果在长时间运行后会出现较大偏差。
卫星导航传感器则可以提供非常精确的位置和速度信息,但它们依赖于卫星信号,在室内、峡谷等环境中可能会失去信号。
此外,卫星导航系统的更新频率相对较低,对于高速运动的飞行器来说,可能无法满足实时性的要求。
气压高度计通过测量大气压力来计算飞行器的高度,但其精度容易受到天气条件和气压变化的影响。
磁传感器可以测量地磁场的方向,从而辅助确定飞行器的航向,但它容易受到周围磁场干扰。
视觉传感器能够提供丰富的环境信息,例如识别障碍物、跟踪目标等,但图像处理和算法的复杂度较高,并且在光照条件恶劣或环境复杂的情况下性能可能会下降。
多传感器融合的方法多种多样,常见的有卡尔曼滤波、扩展卡尔曼滤波、粒子滤波等。
以卡尔曼滤波为例,它是一种基于线性系统模型的最优估计方法。

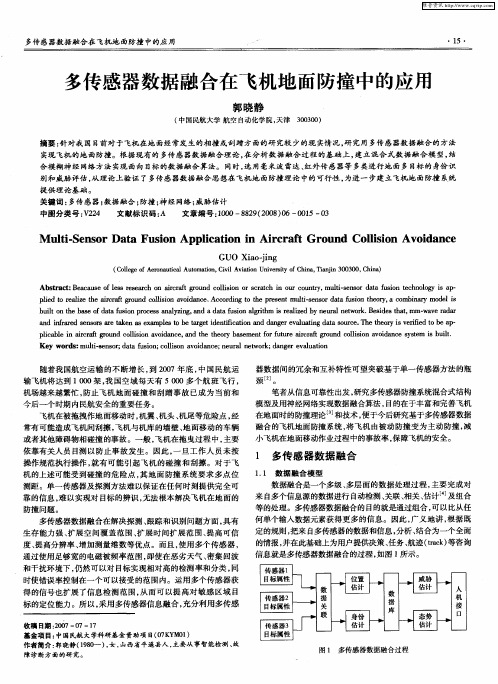
收稿日期:2007-07-17基金项目:中国民航大学科研基金资助项目(07KY M01)作者简介:郭晓静(1980—),女,山西省平遥县人,主要从事智能检测、故障诊断方面的研究。
多传感器数据融合在飞机地面防撞中的应用郭晓静(中国民航大学航空自动化学院,天津 300300)摘要:针对我国目前对于飞机在地面经常发生的相撞或刮蹭方面的研究较少的现实情况,研究用多传感器数据融合的方法实现飞机的地面防撞。
根据现有的多传感器数据融合理论,在分析数据融合过程的基础上,建立混合式数据融合模型,结合模糊神经网络方法实现面向目标的数据融合算法。
同时,选用毫米波雷达、红外传感器等多类进行地面多目标的身份识别和威胁评估,从理论上验证了多传感器数据融合思想在飞机地面防撞理论中的可行性,为进一步建立飞机地面防撞系统提供理论基础。
关键词:多传感器;数据融合;防撞;神经网络;威胁估计中图分类号:V224 文献标识码:A 文章编号:1000-8829(2008)06-0015-03M ulti 2Sen sor Da t a Fusi on Appli ca ti on i n A i rcraft Ground Collisi on Avo i danceG UO Xiao 2jing(College of Aer onautical Aut omati on,Civil Aviati on University of China,Tianjin 300300,China )Abstract:Beacause of less research on aircraft gr ound collisi on or scratch in our country,multi 2sens or data fusi on technol ogy is ap 2p lied t o realize the aircraft gr ound collisi on av oidance .According t o the p resent multi 2sens or data fusi on theory,a co mbinary model is built on the base of data fusi on p r ocess analyzing,and a data fusi on algrith m is realized by neural net w ork .Besides that,mm 2wave radar and infrared sens ors are taken as exa mp les t o be target identificati on and danger evaluating data s ource .The theory is verified t o be ap 2p licable in aircraft gr ound collisi on av oidance,and the theory base ment f or future aircraft gr ound collisi on av oidance syste m is built .Key words:multi 2sens or;data fusi on;collis on avoidance;neural net w ork;danger evaluati on 随着我国航空运输的不断增长,到2007年底,中国民航运输飞机将达到1000架,我国空域每天有5000多个航班飞行,机场越来越繁忙,防止飞机地面碰撞和刮蹭事故已成为当前和今后一个时期内民航安全的重要任务。
飞机在被拖拽作地面移动时,机翼、机头、机尾等危险点,经常有可能造成飞机间刮擦,飞机与机库的墙壁、地面移动的车辆或者其他障碍物相碰撞的事故。
一般,飞机在拖曳过程中,主要依靠有关人员目测以防止事故发生。
因此,一旦工作人员未按操作规范执行操作,就有可能引起飞机的碰撞和刮擦。
对于飞机的上述可能受到碰撞的危险点,其地面防撞系统要求多点位测距。
单一传感器及探测方法难以保证在任何时刻提供完全可靠的信息,难以实现对目标的辨识,无法根本解决飞机在地面的防撞问题。
多传感器数据融合在解决探测、跟踪和识别问题方面,具有生存能力强、扩展空间覆盖范围、扩展时间扩展范围、提高可信度、提高分辨率、增加测量维数等优点。
而且,使用多个传感器,通过使用足够宽的电磁被频率范围,即使在恶劣天气、密集回波和干扰环境下,仍然可以对目标实现相对高的检测率和分类,同时使错误率控制在一个可以接受的范围内。
运用多个传感器获得的信号也扩展了信息检测范围,从而可以提高对敏感区域目标的定位能力。
所以,采用多传感器信息融合,充分利用多传感器数据间的冗余和互补特性可望突破基于单一传感器方法的瓶颈[2]。
笔者从信息可靠性出发,研究多传感器防撞系统混合式结构模型及用神经网络实现数据融合算法,目的在于丰富和完善飞机在地面时的防撞理论[3]和技术,便于今后研究基于多传感器数据融合的飞机地面防撞系统,将飞机由被动防撞变为主动防撞,减小飞机在地面移动作业过程中的事故率,保障飞机的安全。
1 多传感器数据融合1.1 数据融合模型数据融合是一个多级、多层面的数据处理过程,主要完成对来自多个信息源的数据进行自动检测、关联、相关、估计[4]及组合等的处理。
多传感器数据融合的目的就是通过组合,可以比从任何单个输入数据元素获得更多的信息。
因此,广义地讲,根据既定的规则,把来自多传感器的数据和信息,分析、结合为一个全面的情报,并在此基础上为用户提供决策、任务、航迹(track )等咨询信息就是多传感器数据融合的过程,如图1所示。
图1 多传感器数据融合过程・51・多传感器数据融合在飞机地面防撞中的应用可见,融合过程分为3个层次:第1层为位置/身份估计,用于处理各种数值数据。
位置估计一般以最优估计技术为基础;身份估计一般以参数匹配技术为基础,从比较简单的技术到更复杂的统计方法。
第2层为态势评估。
第3层为威胁评估。
第2、3层要处理大量的反映数值数据词关系、含义的抽象数据,因此要使用推断或推理技术。
根据数据和处理过程的分辨率可将融合结构分为像素级融合、特征级融合和决策级融合3类。
本研究选择特征级融合结构,即从每个传感器数据中提取出代表传感器视野中目标的特征数据,然后各目标的特征数据又融合为一个综合特征,如图2所示。
图2 数据融合结构目标的特征向量从毫米波雷达、被动式红外传感器数据中抽取,然后把这些特征向量连接起来形成一个综合特征向量输入到神经网络中。
神经网络经过离线训练,可以识别出期待的目标,并且把它们从虚假目标中分离出来,当输入一个新的特征向量时,网络就可以以一定的概率、置信度或优先级指出该特征向量是属于哪一类。
因为训练网络的时候使用了所有传感器的数据,所以如果某一个传感器由其他类型的传感器所代替,就要重新开始收集数据并进行重新训练。
人工智能信息技术在第三层次的多传感器数据融合中的应用正处于研究发展阶段,实际应用的潜力很大。
通过选择神经网络系统,使数据融合系统具有较好的自学习和自适应能力。
1.2 目标识别算法毫米波雷达和红外传感器都有一定的缺陷和不足,很多情况下,两类传感器对各自的判决不能完全确定,所以在进行目标识别时可以采用基于统计方法的De mp ster 2Shafer (D 2S )数据融合算法[5,7]。
假设a1、a2、a3、a4分别表示雷达和红外传感器探测范围内存在的4个目标,其中,a1———目标距离为1,身份属性为A;a2———目标距离为2,身份属性为B;a3———目标距离为1,身份属性为B;a4———目标距离为2,身份属性为A 。
则雷达R 检测到目标的距离为1的概率分配为m R =m R (a 1∪a 3)m R (θ)(1)式中,m R (θ)为目标的距离不可检测为1的概率。
红外O 对目标属于A 的概率分配为m O =m O (a 1∪a 4)m O (θ)(2)式中,m O (θ)为目标属性不可检测为A 的概率。
于是根据D 2S 融合规则,得到矩阵m =m (a 1∪a 3)m (θ)m (a 1)m (a 1∪a 4)(3)其中m (a 1∪a 3)=m O (θ)m R (a 1∪a 3)(4)m (θ)=m O (θ)m R (θ)(5)m (a 1)=m R (a 1∪a 3)m A (a 1∪a 4)(6)m (a 1∪a 4)=m R (θ)m O (a 1∪a 4)(7) 一般来讲,m (a 1)的概率分配值最高,它作为两传感器的数据融合输出结果。
1.3 目标跟踪实现对于多目标物的跟踪,由于目标所处环境以及目标物的运动很难用精确的数学模型来描述,所以借助于模糊逻辑进行目标跟踪更符合现实情况,特别是将神经网络的自学习特点与模糊逻辑相结合容易得到较准确的态势估计和威胁估计。
模糊神经网络在每一时刻依靠样本数据和神经网络学习算法来定义或更新模糊系统。
神经网络的节点能完成二值或连续值运算,并可以有线性或非线性输出函数。
一个通用的神经网络结构由4层节点或处理单元组成一个前反馈型全互联网络,如图3所示。
每个节点完成的处理功能为Z j =F j (∑Y iWji-θj )(8)式中,Z j 是节点j 的总输出;F 是输出函数;Y i 是节点i 的输出;W ji 是节点i 到输入节点j 所使用的权值;θj 阈值,在阈值以下,节点j 不向后继节点提供输出。
图3 神经网络结构图3说明,通过控制权向量、阈值和输出函数,可以调整模型的输出,从而得到对应于已知输入的特定输出,实现神经网络节点的学习功能。
神经网络能够逐步自适应各种输入,从而使网络能够动态地取得权值、阈值和输出函数,为给定输入模式提供所希望的输出模式。
如果把节点控制构成内部反馈网络,则形成自组织神经网络,能进行自主学习。
模糊逻辑应用于多目标跟踪,常选用模糊卡尔曼滤波器。
卡尔曼滤波器在已知所有历史量测的条件下,对目标的位置、速度等状态的估计值与测量值之间误差的方差进行最小化,特别是离散时间模糊卡尔曼滤波器对于多目标跟踪的运算速度相对提高。
在模糊卡尔曼滤波器中对状态矢量X 的预测方程和更新方程如下X^k /k -1=FX ^k -1/k -1(9)X^k /k =X ^k /k -1+G k C k (10)式中,F 为转移矩阵;X^k /k -1为在k -1时刻,用已有的所有数据对k 时刻所作的预测;X^k -1/k -1为k -1时刻状态矢量的预测值;C k 为由模糊逻辑产生的修正矢量;X^k /k 为修正后的k 时刻状态矢量预测值;G k 为滤波器增益。