D_H坐标系下机械手正向运动学分析
- 格式:pdf
- 大小:160.77 KB
- 文档页数:3
机器人的d-h参数摘要:1.引言2.什么是机器人的d-h 参数3.d-h 参数的构成4.d-h 参数的应用5.结论正文:1.引言随着科技的快速发展,机器人技术逐渐成为人们关注的焦点。
在机器人领域,d-h 参数是一个非常重要的概念。
本文将详细解析机器人的d-h 参数,包括它的定义、构成以及应用。
2.什么是机器人的d-h 参数d-h 参数,全称Denavit-Hartenberg 参数,是一种用于描述机器人手臂运动学特性的参数。
它由一组关节变量和一组关节角度组成,可以方便地描述机器人手臂在空间中的位置和姿态。
3.d-h 参数的构成d-h 参数共有四个组成部分,分别是:- 关节变量:描述机器人手臂各关节的转动角度。
- 关节角度:描述机器人手臂各关节的转动方向。
- 旋转轴:描述关节变量和关节角度的旋转轴。
- 坐标系:描述旋转轴所在的坐标系。
这四个组成部分共同构成了机器人的d-h 参数。
4.d-h 参数的应用d-h 参数在机器人领域具有广泛的应用,主要包括:- 运动学分析:通过d-h 参数,可以方便地分析机器人手臂在空间中的运动轨迹。
- 逆运动学求解:通过d-h 参数,可以求解机器人手臂的逆运动学问题,从而实现对机器人的精确控制。
- 碰撞检测:通过d-h 参数,可以快速检测机器人手臂在运动过程中是否会与其他物体发生碰撞。
5.结论d-h 参数是描述机器人手臂运动学特性的重要参数,它具有简洁、直观、易于计算等优点。
在机器人领域,d-h 参数被广泛应用于运动学分析、逆运动学求解和碰撞检测等方面。
基于ADAMS的危险作业机械手工作轨迹分析赵亮亮;马振书;杜峰坡;来升【摘要】利用SolidWorks软件创建机械手的虚拟样机模型,采用D-H法对机械臂进行正向运动学分析和解算,为进一步验证解的正确性,运用ADAMS软件对机械臂运动特性进行仿真分析,得到了机械手处于2种抓取位姿时手爪形心随大臂俯仰的轨迹曲线,与经过正向运动学分析由Matlab绘制的曲线相吻合,这就证明了正向运动学分析的正确性.同时,基于ADAMS的机械手工作轨迹分析,为机械臂的优化设计及运动控制提供了参考依据.%The virtual model of the manipulator is established using SolidWorks,and the direct kinematics problem is analyzed based on the Denavit - Hartenberg method. In order to verify the accuracy of solutions, moving behavior simulation for the manipulator is analyzed depending on ADAMS,and trajectory curves of the gripper's centroid accompanied with the first arm's moving are drawn when the manipulator is set in the two kinds of working poses. The curves are consistent with the ones that are drawn by Matlab through analyzing direct kinematics,which proves the analytic results of direct kinematics to be right. In addition, the working trajectory analysis of the gripper provides a reference for optimal design and motion control of the manipulator.【期刊名称】《机械与电子》【年(卷),期】2011(000)001【总页数】4页(P44-47)【关键词】机械手;正向运动学;工作轨迹;ADAMS【作者】赵亮亮;马振书;杜峰坡;来升【作者单位】军械工程学院,河北石家庄050003;总装备部军械技术研究所,河北石家庄050003;总装备部军械技术研究所,河北石家庄050003;军械工程学院,河北石家庄050003【正文语种】中文【中图分类】TH137;TP2410 引言危险作业机器人[1]是当前机器人领域研究的一个热点。
机械手 D-H 坐标系建立分析孙伏【摘要】D-H method is used widely when analyzing robots and spatial mechanism .However , the fact that there are two joints in middle connecting rod has caused difficulty in understanding and handling in terms of building the linkage ’ coordinate on the previous or rearjoint .On the basis of clarifying the parametric im-plication, the study has tried building and comparing two methods .It shows that the two methods have a-chieved equal results .Through examples , the study analyzes D-H parameter list and kinematical equation with the two methods and comes up with D-H coordination selection method when applying D-H coordinates analy-sis.%在机械手和空间机构分析时,D-H分析法使用广泛。
但是在建立D-H坐标时,中间连杆有两个关节,连杆的坐标是建在前关节还是后关节上,该问题会引起理解和处理的困扰。
在明确了D-H法及其参数含义的基础上,通过两种不同位置D-H坐标的建立和分析对比,说明了两种方法是完全等价的。
通过实例,分析对比了两种方法的D-H参数表和运动学方程,总结出在D-H法分析时D-H坐标选择方法和注意事项。
六自由度机械手的坐标建立及运动学分析1.坐标建立:在六自由度机械手的坐标建立中,一般采用DH约定法(Denavit-Hartenberg法)来建立坐标系。
DH法是一种常用的方法,能够简化坐标系的描述,方便运动学分析。
首先,根据机械手的实际结构和运动方式,确定基座系(O-1-X1-Y1-Z1)和工具系(O-6-X6-Y6-Z6)两个坐标系。
其中,基座系固定在机械手的基座上,而工具系固定在机械手臂的末端执行器部分。
然后,根据机械手的连杆关系,逐个确定每个连杆的坐标系。
对于每个连杆的坐标系,可以通过以下几个步骤确定:1)确定连杆旋转轴,选择旋转轴为Z轴。
2)确定连杆的连杆中心线与相邻连杆中心线的夹角,选择夹角为连杆坐标系的转角θ。
3)确定连杆坐标系的原点与相邻连杆坐标系的原点之间的距离,选择距离为连杆坐标系的运动方向z。
4)确定连杆坐标系的x轴,通过右手定则确定。
根据以上步骤,可以逐个确定各个连杆的坐标系,最终建立整个六自由度机械手的坐标系。
2.运动学分析:运动学正解是指通过给定每个关节的转角,计算末端执行器的位置和姿态。
运动学正解的计算可以采用连乘法则,从基座系逐步向前计算每个连杆的变换矩阵,最终得到末端执行器的变换矩阵。
运动学逆解是指通过给定末端执行器的位置和姿态,计算每个关节的转角。
运动学逆解的计算可以通过逆运动学方法实现,其中一种常用的方法是通过解析法,通过求解多元非线性方程组得到关节转角的解析解。
在进行运动学分析时,还需要考虑机械手的工作空间限制、奇异位置的问题以及碰撞检测等。
因此,在实际运动学分析中,可能需要进行机器人的轨迹规划和路径规划。
总结:六自由度机械手的坐标建立和运动学分析是机械手设计和控制的基础。
通过建立机械手的坐标系,可以方便地描述六自由度机械手的结构和运动方式。
而运动学分析可以通过运动学正解和逆解,实现机械手的位置和姿态的计算。
熟练掌握六自由度机械手的坐标建立和运动学分析,对于机械手的设计和控制具有重要意义。
标准d-h参数法建立六关节臂型机器人的连杆坐标系
标准D-H参数法是一种常用的方法,用于建立机器人的运动
学模型。
在六关节臂型机器人中,每个关节都有一个连杆坐标系。
以下是使用标准D-H参数法建立六关节臂型机器人连杆坐标
系的步骤:
1. 给每个关节定义一个坐标系,通常选择右手坐标系规定方向。
其中,基座(base)使用基座坐标系(坐标系0),末端执行
器(end effector)使用末端坐标系(坐标系N)。
2. 选择一个参考位置,并为每个关节选择一个坐标系原点,通常选取连接轴线的交点作为原点。
3. 根据机器人的结构和运动特点,确定关节坐标系的方向,规定z轴为关节轴线的方向,x轴为连接前一关节与当前关节的
交线的方向。
4. 使用三个转换矩阵描述每个关节的位姿变换,即由前一个关节坐标系到当前关节坐标系的变换关系。
5. 使用DH参数(a, alpha, d, theta)描述每个关节坐标系之间
的相对位移,其中a和alpha表示连接前一关节与当前关节坐
标系原点的距离和连接线与x轴之间的夹角;d表示连接前一
关节与当前关节坐标系原点在z轴方向上的位移;theta表示
连接前一关节与当前关节坐标系原点在z轴方向上的旋转角度。
6. 根据DH参数,建立每两个关节坐标系之间的变换矩阵,乘积即为整个机器人的运动学变换矩阵。
值得注意的是,标准D-H参数法只能用于建立运动学模型,
不考虑机器人的物理约束和动力学特性。
如果需要进行动力学分析和控制,还需要考虑惯性、摩擦等因素,使用更为复杂的方法。
机器人连杆D-H参数及其坐标变换高向东清华大学机械学院在建立坐标变换方程时,把一系列的坐标系建立在连接连杆的关节上,用齐次坐标变换来描述这些坐标之间的相对位置和方向,就可以建立起机器人的运动学方程.现在的问题是如何在每个关节上确定坐标系的方向,以及如何确定相邻两个坐标系之间的相对平移量和旋转量,即需要采用一种合适的方法来描述相邻连杆之间的坐标方向和参数。
常用的是D-H参数法。
D-H参数法Denavit和Hartenberg于1995年提出了一种为关节链中的每一杆件建立坐标系的矩阵方法,即D-H参数法.1.连杆坐标系的建立如图3-15所示,关于建立连杆坐标系的规定如下:(1)z i坐标轴沿i+1关节的轴线方向;(2)x i坐标轴沿z i和z i-1轴的公垂线,且指向背离z i-1轴的方向;(3)y i坐标轴的方向须满足x i轴、z i轴构成x i y i z i右手直角坐标系的条件。
2.连杆参数1)单根连杆参数用两相邻关节轴线间的相对位置关系来描述单根连杆的尺寸,有两个参数。
(1)连杆长度(link length)a i为两关节轴线之间的距离,即z i轴与z i轴的公垂线长度,沿x i轴方向测量.a i总为正值,当两关—1节轴线平行时,a i=l i,l i为连杆的长度;当两关节轴线垂直时,a i=0。
(2)连杆扭角(link twist)αi为两关节轴线之间的夹角,即z i与z i-1轴之间的夹角,绕x i轴从z i—1轴旋转到z i轴,符合右手规则时为正。
当两关节轴线平行时,αi=0;当两关节轴线垂直时,αi=90o.2)相邻连杆之间的参数相邻两连杆之间的参数,用两根公垂线之间的关系来描述.(1)连杆距离(link offset)d i为两根公垂线a i与a i-1之间的距离,即x i轴与x i—1轴之间的距离,在z i—1轴上测量。
对于转动关节,d i为常数;对于移动关节,d i为变量。
(2)连杆转角(joint angle)θi为两根公垂线a i与a i-1之间的夹角,即x i轴与x i-1轴之间的夹角,绕z i—1轴从x i-1轴旋转到x i轴,符合右手规则时为正.对于转动关节,θi为变量;对移动关节,θi为常数。
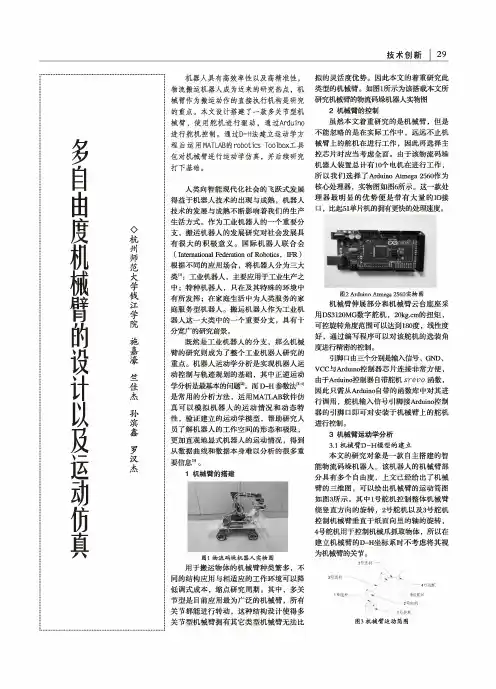
技术创新 29◊杭州师范大学钱江学院施嘉濠竺佳杰 孙滨鑫罗汉杰多自由度机械臂的设计以及运动仿真机器人具有高效率性以及高精准性, 物流搬运机器人成为近来的研究热点,机械臂作为搬运动作的直接执行机构是研究 的重点。
本文设计搭建了一款多关节型机械臂,使用舵机进行驱动,通过Arduino进行舵机控制。
通过D-H 法建立运动学方 程后运用MATLAB 的robotics Toolbox 工具包对机械臂进行运动学仿真,并后续研究 打下基础。
人类向智能现代化社会的飞跃式发展 得益于机器人技术的出现与成熟,机器人 技术的发展与成熟不断影响着我们的生产生活方式。
作为工业机器人的一个重要分 支,搬运机器人的发展研究对社会发展具有很大的积极意义。
国际机器人联合会 (International Federation of Robotics , IFR )根据不同的应用场合,将机器人分为三大 类叫工业机器人,主要应用于工业生产之 中;特种机器人,只在及其特殊的环境中 有所发挥;在家庭生活中为人类服务的家庭服务型机器人。
搬运机器人作为工业机器人这一大类中的一个重要分支,具有十 分宽广的研究前景。
既然是工业机器人的分支,那么机械臂的研究则成为了整个工业机器人研究的 重点。
机器人运动学分析是实现机器人运 动控制与轨迹规划的基础,其中正逆运动学分析是最基本的问题鷺而D-H 参数法X是常用的分析方法,运用MATLAB 软件仿 真可以模拟机器人的运动情况和动态特 性,验证建立的运动学模型,帮助研究人员了解机器人的工作空间的形态和极限,更加直观地显式机器人的运动情况,得到 从数据曲线和数据本身难以分析的很多重 要信息曲□1机械臂的搭建图1物流码垛机器人实物图用于搬运物体的机械臂种类繁多,不 同的结构应用与相适应的工作环境可以降低调式成本,缩点研究周期。
其中,多关节型是目前应用最为广泛的机械臂,所有关节都能进行转动,这种结构设计使得多关节型机械臂拥有其它类型机械臂无法比 拟的灵活度优势。
机械臂D-H法正运动学研究一、D-H参数定义Denavit-Hartenberg (D-H) 方法是一种广泛用于描述机器人臂杆的参数化方法。
在D-H参数中,每一个关节都有一个与之对应的连杆,其中包含了四个参数:关节角度、连杆长度、连杆偏移量和关节旋转轴。
这些参数提供了机械臂的位置和姿态信息,使得我们能够全面描述机械臂的状态。
二、连杆变换矩阵连杆变换矩阵是D-H参数的核心部分,它描述了从一个连杆到下一个连杆的坐标变换。
通过连续应用这些变换矩阵,我们可以得到机械臂末端执行器的全局位置和姿态。
这些变换矩阵是仿射变换的一种,包括了平移和旋转。
三、关节角度计算关节角度是描述机械臂运动状态的重要参数。
通过测量或计算每个关节的角度,我们可以确定机械臂的位置和姿态。
关节角度的计算是机械臂控制的关键步骤,通常需要通过传感器或编码器进行测量。
四、正运动学方程建立正运动学方程是描述机械臂末端执行器位置和姿态的数学模型。
通过已知的关节角度和D-H参数,我们可以计算出末端执行器的位置和姿态。
正运动学方程是非线性方程,通常需要通过数值方法进行求解。
五、运动学逆解在某些情况下,我们已知末端执行器的位置和姿态,需要求解关节角度。
这就是运动学逆解问题。
解决逆解问题需要用到正运动学方程的反向求解,需要找到使得末端执行器达到特定位置和姿态的关节角度。
六、工作空间分析工作空间是指机械臂末端执行器能够达到的所有位置和姿态的集合。
工作空间分析是评估机械臂性能的重要步骤,包括工作空间的形状、大小以及可达性等。
通过优化D-H参数和工作空间设计,可以提高机械臂的灵活性和工作效率。
七、碰撞检测与避障在机器人操作中,碰撞检测和避障是非常重要的安全措施。
通过实时监测机械臂与环境或其他物体之间的距离和角度关系,我们可以避免发生碰撞事故。
同时,为了确保机器人能够自主适应不同的环境,需要进行实时的路径规划和避障策略设计。
这些技术依赖于对工作空间的精确理解以及对运动学方程的实时求解。
2.8机器人正运动学方程的D-H表示法在1955年,Denavit和Hartenberg在“ASME Journal of Applied Mechanics”发表了一篇论文,后来利用这篇论文来对机器人进行表示和建模,并导出了它们的运动方程,这已成为表示机器人和对机器人运动进行建模的标准方法,所以必须学习这部分内容。
Denavit-Hartenberg(D-H模型表示了对机器人连杆和关节进行建模的一种非常简单的方法,可用于任何机器人构型,而不管机器人的结构顺序和复杂程度如何。
它也可用于表示已经讨论过的在任何坐标中的变换,例如直角坐标、圆柱坐标、球坐标、欧拉角坐标及RPY坐标等。
另外,它也可以用于表示全旋转的链式机器人、SCARA机器人或任何可能的关节和连杆组合。
尽管采用前面的方法对机器人直接建模会更快、更直接,但D-H表示法有其附加的好处,使用它已经开发了许多技术,例如,雅克比矩阵的计算和力分析等。
假设机器人由一系列关节和连杆组成。
这些关节可能是滑动(线性)的或旋转(转动)的,它们可以按任意的顺序放置并处于任意的平面。
连杆也可以是任意的长度(包括零),它可能被弯曲或扭曲,也可能位于任意平面上。
所以任何一组关节和连杆都可以构成一个我们想要建模和表示的机器人。
为此,需要给每个关节指定一个参考坐标系,然后,确定从一个关节到下一个关节(一个坐标系到下一个坐标系)来进行变换的步骤。
如果将从基座到第一个关节,再从第一个关节到第二个关节直至到最后一个关节的所有变换结合起来,就得到了机器人的总变换矩阵。
在下一节,将根据D-H表示法确定一个一般步骤来为每个关节指定参考坐标系,然后确定如何实现任意两个相邻坐标系之间的变换,最后写出机器人的总变换矩阵。
图2.25 通用关节—连杆组合的D-H表示假设一个机器人由任意多的连杆和关节以任意形式构成。
图2.25表示了三个顺序的关节和两个连杆。
虽然这些关节和连杆并不一定与任何实际机器人的关节或连杆相似,但是他们非常常见,且能很容易地表示实际机器人的任何关节。
正向运动学主要解决机器人运动学方程及手部位姿的问题。
摘要:一、正向运动学简介1.正向运动学的定义2.正向运动学的研究意义二、正向运动学的基本问题1.机器人运动学方程2.手部位姿问题三、正向运动学的应用领域1.工业机器人2.服务机器人3.智能家居四、正向运动学的发展趋势1.正向运动学与逆向运动学的结合2.正向运动学在新型机器人中的应用正文:正向运动学是机器人学中的一个重要分支,主要研究机器人运动控制和手部位姿的问题。
正向运动学通过对机器人各个关节的位姿进行建模和控制,使得机器人能够准确地执行预定的运动任务。
一、正向运动学简介正向运动学,又称正运动学,主要研究机器人的运动学方程及手部位姿的问题。
其中,运动学方程是描述机器人各个关节运动规律的数学模型,而手部位姿则是机器人在执行任务时,手部需要达到的目标位置和姿态。
正向运动学的主要任务是建立机器人运动学方程,并求解手部位姿,使得机器人能够准确地执行预定的运动任务。
二、正向运动学的基本问题正向运动学涉及两个基本问题:机器人运动学方程和手部位姿问题。
1.机器人运动学方程机器人运动学方程是描述机器人各个关节运动规律的数学模型。
一般情况下,机器人运动学方程是一个非线性方程组,需要通过一定的算法进行求解。
求解机器人运动学方程可以帮助我们了解机器人在执行运动任务过程中各个关节的运动状态,从而为机器人的运动控制提供依据。
2.手部位姿问题手部位姿问题是正向运动学的另一个基本问题,主要研究机器人在执行任务时,手部需要达到的目标位置和姿态。
手部位姿问题的解决可以帮助机器人准确地抓取物体、完成装配任务等。
三、正向运动学的应用领域正向运动学在许多领域都有广泛的应用,如工业机器人、服务机器人、智能家居等。
1.工业机器人正向运动学在工业机器人领域的应用十分广泛。
通过正向运动学的研究,可以提高工业机器人的运动精度和运动效率,从而提高生产效率和产品质量。
2.服务机器人服务机器人也需要解决正向运动学问题,以便准确地执行服务任务。
2.8机器人正运动学方程的D-H表示法在1955年,Denavit和Hartenberg在“ASME Journal of Applied Mechanics”发表了一篇论文,后来利用这篇论文来对机器人进行表示和建模,并导出了它们的运动方程,这已成为表示机器人和对机器人运动进行建模的标准方法,所以必须学习这部分内容。
Denavit-Hartenberg(D-H)模型表示了对机器人连杆和关节进行建模的一种非常简单的方法,可用于任何机器人构型,而不管机器人的结构顺序和复杂程度如何。
它也可用于表示已经讨论过的在任何坐标中的变换,例如直角坐标、圆柱坐标、球坐标、欧拉角坐标及RPY坐标等。
另外,它也可以用于表示全旋转的链式机器人、SCARA机器人或任何可能的关节和连杆组合。
尽管采用前面的方法对机器人直接建模会更快、更直接,但D-H表示法有其附加的好处,使用它已经开发了许多技术,例如,雅克比矩阵的计算和力分析等。
假设机器人由一系列关节和连杆组成。
这些关节可能是滑动(线性)的或旋转(转动)的,它们可以按任意的顺序放置并处于任意的平面。
连杆也可以是任意的长度(包括零),它可能被弯曲或扭曲,也可能位于任意平面上。
所以任何一组关节和连杆都可以构成一个我们想要建模和表示的机器人。
为此,需要给每个关节指定一个参考坐标系,然后,确定从一个关节到下一个关节(一个坐标系到下一个坐标系)来进行变换的步骤。
如果将从基座到第一个关节,再从第一个关节到第二个关节直至到最后一个关节的所有变换结合起来,就得到了机器人的总变换矩阵。
在下一节,将根据D-H表示法确定一个一般步骤来为每个关节指定参考坐标系,然后确定如何实现任意两个相邻坐标系之间的变换,最后写出机器人的总变换矩阵。
图2.25 通用关节—连杆组合的D-H表示假设一个机器人由任意多的连杆和关节以任意形式构成。
图2.25表示了三个顺序的关节和两个连杆。
虽然这些关节和连杆并不一定与任何实际机器人的关节或连杆相似,但是他们非常常见,且能很容易地表示实际机器人的任何关节。