二自由度振动系统的简单主动控制【开题报告】
- 格式:doc
- 大小:88.00 KB
- 文档页数:3

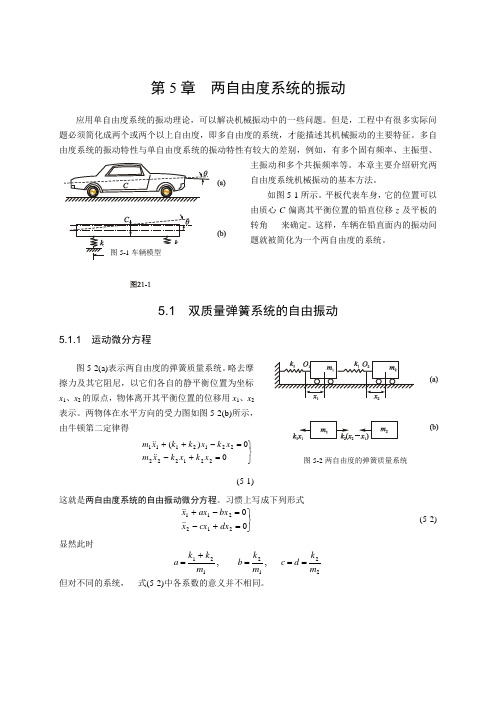
二自由度系统的振动1.概述在实际工程中,真正的单自由度振动是很少的,而是根据需要将被研究对象简化成单自由度系统来研究。
但是许多问题不能简化为单自由度系统,为满足工程精度上的需要,必须按多自由度系统来研究。
一般讲,三自由度以上的系统要得到闭合解是相当困难的。
在这种情况下,可以用坐标变换的方法,将描述实际问题的广义坐标用一组新的坐标来代替。
新坐标所描述的系统运动方程与实际系统是相同的,但用新坐标描述的系统微分方程之间已不存在耦合,称为各自独立的微分方程,就可以按单自由度系统的微分方程那样一一单独求解。
这种新坐标主坐标或模态坐标。
二自由度系统是最简单的多自由度振动系统,许多多自由度喜用的物理概念及解题思路可以从二自由度系统的分析中得到启迪,也是分析多自由度系统的基础。
二自由度振动系统的结构具有两个固有频率。
当系统按其中某一固有频率作自由振动时,称之为主振动。
主振动是简谐振动。
当发生主振动时,描述振动的两个独立变量与振幅之间有确定的比例关系,即两个振幅比决定了整个系统的振动形态,称之为主振型。
任意初始条件下的自由振动一般是这两个不同频率的主振动的叠加,其叠加后的振动不一定是简谐振动。
当外界激扰为简谐激扰时,系统对其响应是与激扰频率相同的简谐振动。
当激扰频率接近系统的任意一固有频率时,就会发生共振。
共振时的振型就是与固有频率相对应的主振型。
此时,喜用的两个振动的振幅都趋于最大值。
2.二自由度系统的运动方程图1所示为具有粘性阻尼的二自由度系统。
图1.二自由度系统模型对质量m1、m2绘分离体图,如图2所示。
图2.二自由度系统分析图用牛顿第二定律分别列分离体在水平方向方程得:整理得:由两个联立二阶常微分方程所描述的系统统称为二自由度系统。
上述方程可以方便的表示成矩阵形式。
常数矩阵[m]、[c]和[k]分别为质量、阻尼、刚度矩阵。
{x(t)}和{F(t)}分别称为二维位移向量和力向量。
可以将上述方程写成矩阵形式:对于同一系统当采用不同的独立坐标系来描述时,其[m]、[c]、[k]矩阵中的元素是不同的,但不影响系统的固有特性,系统的固有频率与坐标的选取无关,一定的系统固有频率是一定的。


3.1引言:由前馈控制器和反馈控制器组成的二自由度控制方法通过前馈控制提高系统的跟踪控制精度和带宽,通过反馈控制补偿由外部干扰、系统不确定性因素等造成的跟踪误差,以及保证系统的鲁棒性。
近年来,采用不同的前馈控制器和反馈控制器组成的二自由度控制方法越来越多地应用到坐落式微型智能电网、纳米定位以及光盘、硬盘驱动控制中,并证明其相对于单一的反馈控制具有更好的位置跟踪控制性能。
目前,二自由度控制中的前馈控制器大多数都采用零相位跟踪控制(ZPETC)、零幅值跟踪控制(ZMETC)和基于滤波器的前馈控制等方法设计,反馈控制器则大多数采用PID 控制、自适应控制和鲁棒反馈控制等控制方法设计。
然而,上述前馈控制器设计方法都是根据系统模型设计具备因果特性的稳定控制器,其对于期望跟踪信号和系统模型的信息利用不够充分,对于位置跟踪控制性能的提高是有限的。
同时,大多数反馈控制器的设计方法都没有考虑到前馈控制器对整个跟踪控制系统性能的影响,这样,二自由度控制系统中的前馈控制信号和反馈控制信号随机叠加,会导致位置跟踪性能在系统不确定性存在的情况下并不一定能够满足系统跟踪控制的要求。
3.1.1 鲁棒控制方法的研究现状近年来,诸多学者从线性矩阵不等式角度,结合李雅普诺夫函数,针对网络控制和时滞控制进行了研究。
另有其他学者对非线性鲁棒控制进行研究,提出了抑制干扰和镇定的有效手段。
目前,针对鲁棒控制方法在实际中的应用,已经有较为成熟的CAD 工具,例如,H控制问题、综合设MATLAB Robust Control Toolbox 能够方便有效地解决LMI 问题、计问题等。
鲁棒方法由于其考虑了实际系统的不确定因素,也实际系统设计中得到了有效的使用,例如,在硬盘磁头定位控制中鲁棒方法的应用,使得在硬盘个体差异存在的条件下,仍能满足控制精度,满足了硬盘大批量生产的要求;批量生产的挖掘机控制的设计问题,也能够用鲁棒控制方法较为有效地解决;汽车离合器变速缓冲控制、矿车速度控制、三峡输电控制等诸多应用场合,鲁棒控制方法都发挥着重要作用。
![二自由度振动系统的简单主动控制[设计+开题+综述]](https://img.taocdn.com/s1/m/eb70d7f2daef5ef7ba0d3ce1.png)
开题报告机械设计制造及其自动化二自由度振动系统的简单主动控制一、选题的背景与意义振动控制是振动工程领域内的一个重要分支,可分为被动控制与主动控制两类。
被动控制由于不需外界能源,装置结构简单,许多场合下减振效果与可靠性较好,已经获得广泛应用。
但随着科学技术的发展,以及人们对振动环境、产品与结构振动特性越来越高的要求,被动控制已难以满足要求。
本文将通过对车辆的振动特性进行分析,建立二自由度分析模型,选取适当的简单的控制方法,对其进行控制,使之平顺性更好。
二、研究的基本内容与拟解决的主要问题2.1研究的基本内容(1)了解车辆平顺性和控制理论的相关背景知识;(2)建立二自由度系统,能够进行仿真分析;(3)在模型中建立作动器,对模型进行改进;(4)对分析结果进行总结,分析控制前后模型的加速度均方根值的变化;2.2拟解决的主要问题对二自由度振动系统进行仿真模拟并对其动态特性进行研究,并加入控制系统,根据振动控制系统仿真结果,控制能达到良好的隔振效果。
三、研究的方法与技术路线本课题的技术路线主要是通过分别建立1/4车辆振动系统的被动和主动悬架,并进行相应的仿真,最后通过对比来说明主动悬架和被动悬架对于车辆的减震效果的差异。
课题的技术路线如下:图3-1 技术路线图四、研究的总体安排与进度(1)了解车辆平顺性和控制理论的相关背景知识(1周);(2)建立二自由度系统,能够进行仿真分析;(3周);(3)在模型中建立作动器,对模型进行改进;(4周)(4)对分析结果进行总结,分析控制前后模型的加速度均方根值的变化(2周);(5)整理、撰写毕业论文(2周)。
参考文献[1] 冯崇毅.汽车电子控制技术[M],北京:人民交通出版社,2005.[2] 蔡兴旺.汽车构造与原理下册[M],北京:机械工业出版社,2004.[3] 王加春,李旦,董申.机械振动主动控制技术的研究现状和发展综述[J],机械强度,2001,23 (2):156-160.[4] 蔺玉辉,靳晓雄,肖勇.振动主动控制技术的研究进展[J],上海汽车,2006,7:29-31.[5] 耿瑞.基于MATLAB的自适应模糊PID控制系统计算机仿真[J],信息技术,2007.(4):43-46.[6] 王加春,李旦,董申.超精密机床溜板的模糊-PID振动主动控制研究[J],2001.1:57-60.[7] 王辚,张科.基于MATLAB的自整定模糊PID控制系统[J],探测与控制学报,2008.4(30):73-76.[8] 阮观强,叶本钢.基于MATLAB仿真的汽车主动悬架与被动悬架的研究[J],上海电机学院学报,2007.10(4):284-287.[9] Dave Crolla,喻凡.车辆动力学及其控制[M],北京:人民交通出版社,2004.[10] 李迪,郭忠菊,王军方,等.利用MATLAB的汽车主动悬架动力学仿真[J],山东理工大学学报,2003.17(6):21-25.[11] Mariano Febbo and Sergio A.Vera.Dynamic characteristics of 1 and 2degrees-of-freedom systems acting as dynamic vibration absorbers on continuum systems [J],Mecánica Computacional Vol XXIX,2010:747-765.[12] Rabih Alkhatib and M.F.Golnaraghi,Active structural vibration control:a review[J],The Shock and Vibration Digest,2003.35:367-384.毕业论文文献综述机械设计制造及其自动化二自由度振动系统的简单主动控制摘要:为了改善车辆的平顺性,本文建立了车辆的二自由度振动模型。
一种旋转—直线运动的两自由度超声波电机的研究的开题报告一、研究背景和意义目前,随着机器人、智能家居以及智能移动设备等领域的普及,超声波电机在自动化领域中逐渐成为了广泛应用的一种新型驱动技术。
与传统的电机相比,超声波电机具有转矩大、效率高、响应快、精度高等优势,并且具有低电磁干扰、体积小等特点。
在机器人、智能家居等自动化应用中,超声波电机的两自由度运动可以实现机构的多种复杂运动模式,使机器人的动作更加灵活且具有更高的准确性,因此超声波电机的研究和应用有着重要的意义。
二、研究目标本文的研究目标是设计一种具有旋转和直线运动两自由度的超声波电机,并探索其在自动化领域中的应用。
三、研究内容1. 超声波电机原理和分类学习,选定一种适合设计的超声波电机类型;2. 设计出一种具有旋转和直线运动两自由度的超声波电机,包括结构设计、动力学分析等;3. 制造并测试设计的超声波电机,并对其性能进行评估;4. 探索超声波电机在自动化领域中的应用,如机器人、智能家居等,并进行实验验证。
四、预期成果完成本研究后,预期可以得到以下成果:1. 设计出一种具有旋转和直线运动两自由度的超声波电机,并制造成功;2. 评估设计的超声波电机性能,并分析其优缺点;3. 探索超声波电机在自动化领域中的应用,并进行实验验证。
五、研究方法本文将采取以下研究方法:1. 理论学习,学习超声波电机原理、分类和应用等相关知识;2. 结合已有研究成果和实际需求,选定一种适合自动化领域的超声波电机类型,并进行结构设计、动力学分析、特性参数计算等工作;3. 制造出设计的超声波电机,并进行性能测试和评估;4. 探索超声波电机在自动化领域中的应用,并进行实验验证。
六、研究计划本研究计划总共耗时12个月,具体安排如下:第1-3个月:学习超声波电机相关知识,选定研究方向。
第4-6个月:进行超声波电机结构设计,包括动力学分析、特性参数计算等。
第7-9个月:制造设计的超声波电机,并进行性能测试和评估。

二自由度康复训练机器人系统的设计开题报告一、选题背景随着人口老龄化和人们对健康的重视,康复医疗在近年来越来越受到关注。
康复机器人作为康复医学的一种新型技术,具有不可替代的作用。
对于许多患者来说,训练是实现康复的关键,但是传统的康复训练往往需要大量的人力和物力资源。
因此,设计一种康复训练机器人系统,可以极大地方便患者进行康复训练,并且提高康复训练的效果,是一个十分有价值的研究方向。
本课题选取了二自由度康复训练机器人系统的设计作为研究内容。
该系统拥有两个自由度,可以达到多维度、多角度的康复训练效果。
同时,由于机器人系统的控制精度高,可以确保患者在康复训练中所需的准确度。
二、研究目标本次研究的目标是设计一款二自由度康复训练机器人系统,可以实现以下目标:1. 实现多维度、多角度的康复训练。
2. 提高康复训练的效果。
3. 提高患者的康复训练体验。
三、研究内容本次研究的主要内容如下:1. 机器人系统结构设计。
通过了解康复训练的需要以及患者身体特征,结合机械设计原理,设计出符合要求的机器人系统结构。
2. 机器人系统控制设计。
分析机器人的动力学特性及运动学特性,建立数学模型,设计出控制算法,控制机器人系统的运动。
3. 康复训练的运动方案设计。
根据康复训练的需要,设计出符合要求的运动方案,使得患者可以进行多维度、多角度的康复训练。
4. 系统的硬件和软件实现。
根据以上设计内容,实现机器人系统的硬件和软件部分,进行系统的集成和测试。
四、研究方法本课题主要采用以下研究方法进行研究:1. 理论研究。
通过文献调研、学习机械设计、电路设计、算法设计等相关理论知识,为设计提供理论基础。
2. 实验研究。
采用实验研究方法,验证机器人系统的运动和控制效果,并对系统进行性能测试,针对实验结果进行优化和调整。
三、研究结果与意义设计实现一款二自由度康复训练机器人系统,对于康复医学领域具有重要意义。
可以帮助患者更好地进行康复训练,提高训练效果,进一步缓解医疗资源不足的情况,提升医疗水平,有助于推进康复医学研究的发展。
压电智能板振动主动控制新方法研究的开题报告开题报告:一、选题背景智能板由于具有良好的结构稳定性和机电耦合特性,因而被广泛应用于航空、航天、国防等科研领域,尤其是在上述领域中的精密控制方面发挥着重要作用。
在实际应用中,智能板的振动主动控制是一个研究热点。
传统振动控制方法包括PID控制和模糊控制等,其中PID控制方法在应用范围较广。
但是这些传统方法往往需要参考信号或模型,对控制系统的鲁棒性、可靠性和实时性等需求很高,因此需要考虑新的振动主动控制方法。
压电智能板作为一种新型的振动控制器,它具有高灵敏度、高响应速度和低成本等优点。
因此,压电智能板振动主动控制在理论和实际应用中也受到越来越多的关注。
本文研究的目的是探索压电智能板在振动控制中的应用,提出新的振动主动控制方法。
二、研究内容本文旨在提出一种基于压电智能板的新型振动主动控制方法,通过将压电智能板固定在振动结构上,利用其压电效应产生一个控制力矩,来控制振动结构的振动特征。
控制方法是在基于图像识别的基础上提出来的,通过对振动特征的在线监测和分析,确定控制力的大小和方向,从而达到抑制结构振动的目的。
具体的研究内容包括:1. 压电智能板的原理及振动控制特性分析;2. 在线振动信号采集与分析;3. 图像采集和处理算法,用于识别振动特征和确定控制力的大小和方向;4. 基于压电智能板的新型振动主动控制算法,包括控制力的计算和实时调节等;5. 实验验证与分析。
三、研究意义本文提出的基于压电智能板的新型振动主动控制方法,通过图像识别与在线信号分析相结合,实现了更加直观、高效的振动控制过程。
本文的研究成果有以下几个方面的意义:1. 增加了智能板的应用范围,扩大了其在振动控制领域中的应用;2. 提高了智能板的控制精度和控制速度,使其更加适用于多种工况;3. 优化了控制算法,提高了控制系统的鲁棒性和实时性;4. 深化了对智能板在振动控制中应用的理解,为后续相关领域的应用提供了理论支撑。

振动系统鲁棒主动控制研究的开题报告一、选题背景振动系统是一类常见的动力学系统,如机械系统中的转子、车辆、飞机等,都涉及到振动问题。
然而,振动对系统的性能和寿命均有重大影响。
因此,对振动系统的控制研究具有重要意义。
传统的振动控制方法主要是被动控制和半主动控制,这些方法受到制动器和阻尼器等元件的质量和寿命的限制,难以在实际应用中实现很好的鲁棒性和精度。
因此,振动系统鲁棒主动控制成为了一个研究热点。
二、研究内容本课题的主要研究内容是振动系统鲁棒主动控制。
鲁棒控制是指能够保证控制系统在各种不确定因素的影响下依然能够正常工作的控制方法。
主动控制是指控制系统能够根据反馈信号主动进行调节,并且具有时域和频域的特点。
本研究将探讨如何将鲁棒和主动的思想应用到振动系统的控制中。
具体包括以下内容:1. 振动信号采集与分析在系统中安装传感器以采集振动信号,通过对信号进行分析,得到振动系统的特征参数,进而为后续的控制提供依据。
2. 鲁棒主动控制算法研究根据振动系统的特点和分析结果,研究鲁棒主动控制算法,即能够同时保证系统对不确定因素的鲁棒性,并根据反馈信号主动调整系统的控制。
3. 系统模型建立与仿真建立振动系统的系统模型,进行仿真验证算法的有效性。
4. 验证实验在振动台上对系统进行实际验证,验证算法在实际应用中的效果。
三、研究意义1. 提高控制精度和鲁棒性通过鲁棒主动控制,能够有效提高振动系统的控制精度和鲁棒性。
2. 增加系统寿命通过精确控制振动,降低系统的振动疲劳程度,从而延长系统的寿命。
3. 推动振动控制领域的研究本研究对于推动振动控制领域的研究具有积极作用,能够为未来的相关研究提供理论基础和实验证据。
四、研究方法和技术路线本研究采用如下方法和技术路线:1. 振动信号采集与分析:采用加速度计和振动传感器进行振动信号采集,通过信号处理算法得到振动系统的特征参数。
2. 鲁棒主动控制算法研究:将鲁棒控制和主动控制相结合,研究合适的控制算法,能够保证在各种不确定因素的影响下系统正常工作,并能够主动调节控制信号。
10.16638/ki.1671-7988.2020.02.023两自由度系统的自由振动实验余亚敏1,周晓冰2,陆晶晶3(1.中汽研汽车检验中心(宁波)有限公司整车试验研究部,浙江宁波315104;2.长安大学,陕西西安710061;3.大连理工大学,辽宁大连116024)摘要:汽车行驶过程中会因为地面不平引起的冲击载荷、发动机工作的振动等原因而产生振动, 当汽车振动的频率与车身固有频率相接近时,车身会产生很大的垂向加速度,不仅会使驾乘人员感到不适,还会造成车身结构的损坏。
因此,对于汽车振动模型的研究就显得尤其重要。
以搭建的两自由度系统的试验模型为研究对象,求得其在不同初始条件下实验的自由振动响应,来验证理论求解模型的正确性,为汽车平顺性的改善提供理论依据。
关键词:两自由系统试验模型;汽车平顺性;响应中图分类号:U467 文献标识码:B 文章编号:1671-7988(2020)02-73-05Experimental verification of free vibration of two-degree-of-freedom systemYu Yamin1, Zhou Xiaobing2, Lu Jingjing3(1.China Automotive Research Automotive Testing Center (Ningbo) Co., Ltd., Vehicle Test andResearch Department, Zhejiang Ningbo 315104; 2.Chang'an University, Shaanxi Xi'an 710061;3.Dalian University of Technology, Liaoning Dalian 116024)Abstract: During the driving process, the vibration will be generated due to the impact load caused by the uneven ground, the vibration of the engine working, etc. When the frequency of the vehicle vibration is close to the natural frequency of the vehicle body, the vehicle body will generate a large vertical acceleration, which will not only drive The passenger feels uncomfortable and can also cause damage to the body structure. Therefore, research on automotive vibration models is particularly important. The experimental model of the two-degree-of-freedom system is taken as the research object, and the free vibration response of experiment under different initial conditions is obtained and verify the correctness of the theoretical solution model for the smoothness of the car.Keywords: 1/4 automotive test model; Ehicle ride comfort; ResponseCLC NO.: U467 Document Code: B Article ID: 1671-7988(2020)02-73-05前言随着生活水平的提高,汽车的乘坐舒适性已经成为了衡量一辆汽车性能好坏的重要指标。
基于二自由度控制器的协调控制的开题报告一、研究背景和意义随着机器人技术的不断发展,机器人在现代工业制造中发挥越来越重要的作用。
控制机器人运动是机器人系统控制的关键问题之一。
对于一些复杂的运动,如协同工作、协调运动等,需要机器人具有协调性和互动性。
而二自由度控制器是一种常用的机器人控制器,其能够实现机器人的良好控制。
本文旨在探讨基于二自由度控制器的协调控制方法,为机器人的协同工作等复杂任务提供方法支持。
二、研究现状目前,协调控制方法有许多种,如基于神经网络的方法、基于模型预测控制的方法、基于状态反馈的方法等。
其中,基于二自由度控制器的协调控制方法是最为常用的方法之一。
该方法在机器人控制领域中得到了广泛的应用与研究。
三、研究内容和意义本文将针对基于二自由度控制器的协调控制方法进行研究,并针对其进行改进和优化。
通过对机器人控制理论和实践经验的总结,发现该方法存在如下问题:控制仿真结果显示其具有一定的性能限制。
然而,对于机器人控制来说,性能限制是非常重要的因素之一。
因此,本文将利用理论方法和实验验证,对该方法的性能限制进行改进。
同时,本文研究的结果对于提高机器人控制的协调性和互动性,有着重要的指导意义。
四、研究方法和步骤1. 查阅相关文献并总结机器人控制的常用方法;2. 分析基于二自由度控制器的协调控制方法的优点和不足之处;3. 针对该方法存在的问题,提出改进和优化方案;4. 通过理论方法和实验验证,评估改进和优化方案的效果。
五、论文结构1. 第一章:绪论;2. 第二章:机器人控制的常用方法;3. 第三章:基于二自由度控制器的协调控制方法;4. 第四章:基于二自由度控制器的协调控制方法的优化;5. 第五章:实验分析;6. 第六章:结论与展望。

二自由度机械臂控制系统的设计与实现的开题报告一、题目二自由度机械臂控制系统的设计与实现。
二、研究背景随着现代工业的发展,机械臂在制造业和物流领域得到广泛应用。
因此,机械臂控制系统的研究和开发具有重要的现实意义。
目前,机械臂的控制方式主要有基于传统PID控制和基于机器学习的控制方式。
而在二自由度机械臂控制系统的设计和实现中,通常会采用传统PID控制方式。
三、研究目的与意义本文旨在设计和实现一套二自由度机械臂控制系统,以便更好地理解和掌握机械臂控制方面的知识,也为制造业和物流领域提供更好的机械臂控制系统方案。
四、研究内容1、二自由度机械臂的建模和仿真。
2、采用传统PID控制方式设计机械臂控制器。
3、采用ROS框架搭建机械臂控制系统。
4、控制系统测试与实验。
五、研究方法1、使用Matlab software建模和仿真二自由度机械臂。
2、采用传统PID控制方式,使用Matlab software设计控制器。
3、使用ROS框架,编写控制程序,搭建机械臂控制系统。
4、进行实验测试,对系统进行调试和优化。
六、研究进度安排1、建模和仿真二自由度机械臂及PID控制器的设计:1个月。
2、ROS框架搭建机械臂控制系统和编写控制程序:2个月。
3、实验测试、调试和优化系统:1个月。
4、论文撰写和答辩:1个月。
七、参考文献[1] 蒋永忠, 梁发才, 李广真. ROS系统在机械臂控制中的应用研究[J]. 物理学报, 2019, 68(8): 080508.[2] 叶海涛, 郭东生, 李修涛. 基于PID控制的多自由度机械臂运动控制研究[J]. 现代电子技术, 2016, 39(12): 92-95.[3] 刘娜. 机械臂运动控制与仿真[D].东华大学, 2016.[4] W. Yu, L. J. Young, W. J. Zhang et al. Sliding mode control for the 2-DOF direct-drive robot arm with uncertainties and disturbances [J]. Robotics and Autonomous Systems, 2016, 82: 139-147.。

一类两自由度碰撞振动系统的动力学研究的开题报告
一、研究背景及意义
碰撞振动是现代科学技术中广泛存在的动力学现象。
一类两自由度的碰撞振动系统具有很高的理论和实际研究价值。
在现代机械工程、振动控制、控制力学等领域中,均有大量的研究工作对这类系统进行分析和应用研究。
另外,这样一类振动系统的动力学特性也是深入探讨和研究的热点之一。
二、研究内容和方法
本研究将选取一类两自由度的碰撞振动系统进行分析和研究。
首先,将对该系统的动力学模型进行建立,通过对动力学方程的求解和数值模拟,深入研究该系统的振动特性、动力学特征以及稳定性等问题。
之后,将利用现代控制理论和方法,对该碰撞振动系统进行实时控制,并通过实验验证控制系统的可行性和有效性。
三、预期成果和意义
本研究的预期成果如下:
1、对一类两自由度的碰撞振动系统的动力学特征和控制方法进行深入研究和探讨;
2、建立该系统的数学模型和仿真模型,对系统进行分析和处理,获得该系统的振动特性和动力学特征;
3、利用现代控制理论和方法,研究该系统的控制问题,设计合理的控制算法并开展相应的实验验证与分析;
4、通过对二自由度碰撞振动系统进行深入研究,将为相关学科领域提供理论支撑和实际应用价值。
综上所述,本研究对于完善碰撞振动系统的控制理论、推动现代机械工程和控制力学的发展以及提高其实际应用价值,将具有重要的理论研究和实际应用意义。

复杂过程系统二自由度PID控制方法研究的开题报告一、研究重点及意义复杂过程系统是一个复杂、不确定、非线性的系统,其多变的物理过程和控制方式使得传统的单一控制方法往往无法满足控制要求。
因此,对于复杂过程系统的PID 控制方法研究具有重要的意义。
二、研究内容本文主要研究复杂过程系统的二自由度PID控制方法。
该方法旨在提高传统PID 控制方法的控制效果和鲁棒性,同时解决复杂过程系统中存在的多种不确定因素,使得控制系统的稳态性、动态性、抗干扰性等有了更好的保障。
具体研究内容如下:1. 复杂过程系统的特点和控制要求2. 传统PID控制方法的缺点分析及改进方法3. 二自由度PID控制器的原理和应用4. 复杂过程系统的二自由度PID控制方法及系统设计5. 数值解析和仿真验证三、研究方法和技术路线研究方法主要采用理论分析和仿真验证相结合的方法。
具体技术路线如下:1. 对复杂过程系统进行特点分析和控制要求分析,明确研究目标。
2. 对传统PID控制方法进行分析,从控制效果、鲁棒性、动态特性等方面探讨其不足之处以及改进方法。
3. 引入二自由度PID控制器,对其原理和应用进行研究和分析。
4. 基于二自由度PID控制器,设计复杂过程系统的控制系统,包括系统结构、参数调节方法等。
5. 在仿真环境下,对所设计的控制系统进行数值解析和仿真验证。
四、预期研究成果1. 深入分析复杂过程系统的特点和控制要求,探索改进传统PID控制方法的有效途径。
2. 研究二自由度PID控制器的原理和应用,提出适合复杂过程系统的控制方法。
3. 设计基于二自由度PID控制器的复杂过程系统的控制系统,通过仿真验证,证明所提方法的可行性和优越性。
五、研究进度安排1. 前期工作和文献调研:2021年9月-2021年11月2. 理论分析和控制方法设计:2021年12月-2022年2月3. 数值解析和仿真验证:2022年3月-2022年5月4. 论文撰写和答辩准备:2022年6月-2022年8月六、研究难点1. 复杂过程系统的多变、不确定和非线性等特点给控制系统的设计和实现带来挑战。
毕业论文开题报告
机械设计制造及其自动化
二自由度振动系统的简单主动控制
一、选题的背景与意义
振动控制是振动工程领域内的一个重要分支,可分为被动控制与主动控制两类。
被动控制由于不需外界能源,装置结构简单,许多场合下减振效果与可靠性较好,已经获得广泛应用。
但随着科学技术的发展,以及人们对振动环境、产品与结构振动特性越来越高的要求,被动控制已难以满足要求。
本文将通过对车辆的振动特性进行分析,建立二自由度分析模型,选取适当的简单的控制方法,对其进行控制,使之平顺性更好。
二、研究的基本内容与拟解决的主要问题
2.1研究的基本内容
(1)了解车辆平顺性和控制理论的相关背景知识;
(2)建立二自由度系统,能够进行仿真分析;
(3)在模型中建立作动器,对模型进行改进;
(4)对分析结果进行总结,分析控制前后模型的加速度均方根值的变化;
2.2拟解决的主要问题
对二自由度振动系统进行仿真模拟并对其动态特性进行研究,并加入控制系统,根据振动控制系统仿真结果,控制能达到良好的隔振效果。
三、研究的方法与技术路线
本课题的技术路线主要是通过分别建立1/4车辆振动系统的被动和主动悬架,并进行相应的仿真,最后通过对比来说明主动悬架和被动悬架对于车辆的减震效果的差异。
课题的技术路线如下:
图3-1 技术路线图
四、研究的总体安排与进度
(1)了解车辆平顺性和控制理论的相关背景知识(1周);
(2)建立二自由度系统,能够进行仿真分析;(3周);
(3)在模型中建立作动器,对模型进行改进;(4周)
(4)对分析结果进行总结,分析控制前后模型的加速度均方根值的变化(2周);
(5)整理、撰写毕业论文(2周)。
参考文献
[1] 冯崇毅.汽车电子控制技术[M],北京:人民交通出版社,2005.
[2] 蔡兴旺.汽车构造与原理下册[M],北京:机械工业出版社,2004.
[3] 王加春,李旦,董申.机械振动主动控制技术的研究现状和发展综述[J],机械强度,2001,23 (2):156-160.
[4] 蔺玉辉,靳晓雄,肖勇.振动主动控制技术的研究进展[J],上海汽车,2006,7:29-31.
[5] 耿瑞.基于MATLAB的自适应模糊PID控制系统计算机仿真[J],信息技术,2007.(4)
:43-46.
[6] 王加春,李旦,董申.超精密机床溜板的模糊-PID振动主动控制研究[J],2001.1:57-60
.
[7] 王辚,张科.基于MATLAB的自整定模糊PID控制系统[J],探测与控制学报,2008.4(30):73-76.
[8] 阮观强,叶本钢.基于MATLAB仿真的汽车主动悬架与被动悬架的研究[J],上海电机学院学报,2007.10(4):284-287.
[9] Dave Crolla,喻凡.车辆动力学及其控制[M],北京:人民交通出版社,2004.
[10] 李迪,郭忠菊,王军方,等.利用MATLAB的汽车主动悬架动力学仿真[J],山东理工大学学报,2003.17(6):21-25.
[11] Mariano Febbo and Sergio A.Vera.Dynamic characteristics of 1 and 2
degrees-of-freedom systems acting as dynamic vibration absorbers on continuum systems [J],Mecánica Computacional V ol XXIX,2010:747-765.
[12] Rabih Alkhatib and M.F.Golnaraghi,Active structural vibration control:a review[J],The Shock and Vibration Digest,2003.35:367-384.。