统计信号处理第六章
- 格式:pdf
- 大小:510.37 KB
- 文档页数:71
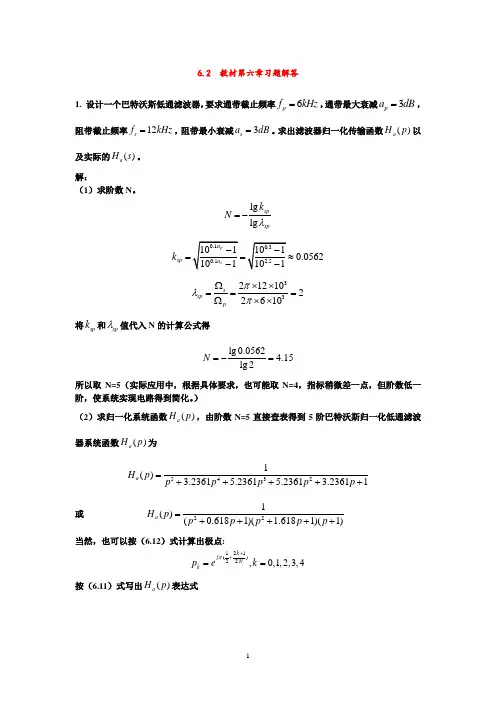
6.2 教材第六章习题解答1. 设计一个巴特沃斯低通滤波器,要求通带截止频率6p f kHz =,通带最大衰减3p a dB =,阻带截止频率12s f kHz =,阻带最小衰减3s a dB =。
求出滤波器归一化传输函数()a H p 以及实际的()a H s 。
解:(1)求阶数N 。
lg lg sp spk N λ=-0.10.30.1 2.51011010.0562101101p s asp a k --==≈--332121022610s sp p πλπΩ⨯⨯===Ω⨯⨯将sp k 和sp λ值代入N 的计算公式得lg 0.05624.15lg 2N =-=所以取N=5(实际应用中,根据具体要求,也可能取N=4,指标稍微差一点,但阶数低一阶,使系统实现电路得到简化。
) (2)求归一化系统函数()a H p ,由阶数N=5直接查表得到5阶巴特沃斯归一化低通滤波器系统函数()a H p 为54321() 3.2361 5.2361 5.2361 3.23611a H p p p p p p =+++++或 221()(0.6181)( 1.6181)(1)a H p p p p p p =+++++ 当然,也可以按(6.12)式计算出极点:121()22,0,1,2,3,4k j Nk p ek π++==按(6.11)式写出()a H p 表达式41()()a k k H p p p ==-代入k p 值并进行分母展开得到与查表相同的结果。
(3)去归一化(即LP-LP 频率变换),由归一化系统函数()a H p 得到实际滤波器系统函数()a H s 。
由于本题中3p a dB =,即32610/c p rad s πΩ=Ω=⨯⨯,因此()()a a cH s H p s p ==Ω5542332453.2361 5.2361 5.2361 3.2361c c c cc cs s ss s Ω=+Ω+Ω+Ω+Ω+Ω对分母因式形式,则有()()a a cH s H p s p ==Ω52222(0.6180)( 1.6180)()c c c c cc s s s s s Ω=+Ω-Ω+Ω-Ω+Ω如上结果中,c Ω的值未代入相乘,这样使读者能清楚地看到去归一化后,3dB 截止频率对归一化系统函数的改变作用。


第六章 习题解答(部分)[1]解:对采样数字系统,数字频率ω与模拟角频率Ω之间满足线性关系T Ω=ω。
因此,当时,ms T 01.0=TT cc 8πω==Ω,Hz T f c c 6251612==Ω=π 当s T µ5=时, TT c c 8πω==Ω,Hz T f c c 125001612==Ω=π[2]解:的极点为:,)(s H a jb a s +−=1jb a s −−=1将部分分式展开: )(s H a )(21)(21)(jb a s j jb a s js H a +−−−+−−−=所以有1)(1)(121121)(−+−−−−−−+−=z e j z e j z H T jb a T jb a通分并化简整理得:TT T e z bT e z bTe z z H ααα2211cos 21sin )(−−−−−−+−=[3]解:归一化原型低通滤波器与带通滤波器之间的频率变换关系为:B⋅ΩΩ−Ω=Ω22s rad p p /1002210×=ΩΩ=Ωπ,s rad B /2002×=π,dB p 2=δs rad s /80021×=Ωπ,s rad s /124022×=Ωπ,dB s 15=δ因此,归一化原型低通滤波器的通带频率p Ω取1,通带处最小衰减为2dB 。
同理可得归一化原型低通滤波器的阻带频率分别为:9375.31221=ΩΩ−Ω=ΩΩ=Ωs Bs , 1597.62222=ΩΩ−Ω=ΩΩ=Ωs Bs因此,归一化原型低通滤波器的阻带频率9375.3),min(21=ΩΩ=Ωs s s ,这是因为取较小的频率值,则较大的频率处一定满足衰减要求,阻带处最大衰减为15dB 。
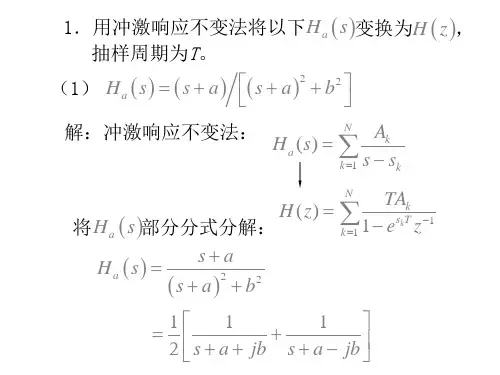
利用巴特沃斯低通滤波器设计归一化原型低通滤波器)(s H 利用归一化原型低通滤波器的指标,得巴特沃斯低通滤波器阶数N444.19372.31lg 2110110lg 5.12.0=⎟⎠⎞⎜⎝⎛⎟⎟⎠⎞⎜⎜⎝⎛−−≥N 取,查表的归一化巴特沃斯原型低通滤波器的系统函数 2=N 14142.11)(2++=s s s H LP由归一化原型低通滤波器变换到实际模拟带通滤波器22202220222)(4142.1)()()(202B s sB s s B s s H s H Bs s s LP BP +Ω++Ω+==⋅Ω+= [4]解:(1)用冲激响应不变法① 确定数字滤波器指标rad p 3/πω=,dB p 3=δ rad s 5/4πω=,dB s 15=δ② 将数字滤波器指标转换为相应的模拟滤波器指标。
6.1Find the linear mean square estimate of )(λ+t y in terms ofy(t) and )()()()(ˆt yc t y b t ay t y ++=+λ Solution: )(ˆ)()(~λλλ+-+=+t y t y t y0)}()](ˆ)({[0)}()](ˆ)({[0)}()](ˆ)({[=+-+=+-+=+-+t yt y t y E t y t y t y E t y t yt y E λλλλλλ由正交原理 ⎪⎩⎪⎨⎧=⋅---+=⋅---+=⋅---+0)}()]()()()({[0)}()]()()()({[0)}()]()()()({[t y t y c t y b t ay t y E t y t y c t yb t ay t y E t y t yc t yb t ay t y E λλλ ⎪⎩⎪⎨⎧=---=---=---=⇒-====-==⇒=-=0)0()0()0()(0)0()0()0()(0)0()0()0()(0)0()()()()()()()()()()(0)0()()()()(y y y y y y y y y yy y y y y y y y y y y y y y y y y y y yy y y y y y y y y y y y y y y c b a c b a c b aφφφλφφφφλφφφφλφφτφτφτφτφτφτφτφτφτφτφφτφτφτφτφ)0()0()0()0()()0()()0()()0()()0()0()0()()0()(2)4(2)4()4(yy y yy y y y y y y y y y y c b a φφφφλφφλφφλφφλφφφφλφφλφ --==--= 6.3 222222)(2)(as a s a s s s v y +-=+--=φφ Solution: )(&)(⋅⋅v y are uncorrelated.))(2)()(2()2)(2)(2)(2(2)()()(2)()(84848484222222222a s a s a s a s aes ae s aes ae s a s a a s s s s s a s s s s jjjjv y z y yz --++--++==+-++--=+=+--==--ππππφφφφφNSjj jjjjz YI z e aes ae s a s a s aes ae s a s a s a s s e ae s ae s a s a s e s s s s H ss)2)(2())(2(])2)(2())(2(2[)2)(2())(2(])()([)(1)(848484842228484ππααφφφ-+--+-+++++=----⋅+--⋅++++==6.9 本章在推导Kalman 滤波器方程时,曾经假定输入w(t)和观测燥声N(t)不相关。