(完整版)刚体的基本运动(可编辑修改word版)
- 格式:docx
- 大小:88.95 KB
- 文档页数:19

第八章刚体的基本运动一、内容提要刚体的基本运动包括刚体的平动和定轴转动。
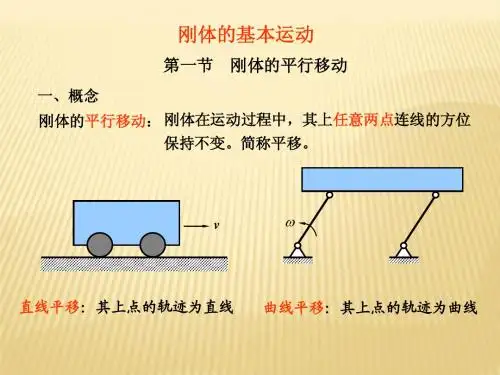
1、刚体的平动(1)刚体的平动的定义:刚体在运动过程中,若其上任一条直线始终保持平行于它的初始位置,称这种运动为刚体的平动。
(2)刚体平动的运动特征:刚体平动时,其上各点的轨迹形状相同并彼此平行;在每一瞬时,刚体上各点的速度相同,各点的加速度也相同。
因此刚体的平动可简化为一个点的运动来研究。
2、刚体的定轴转动(1)刚体的定轴转动的定义:刚体运动时,若其上(或其延伸部分)有一条直线始终保持不变,称这种运动为刚体的定轴转动。
(2)刚体的定轴转动的运动特征:刚体定轴转动时,其上各点均在垂直于转轴的平面内绕转轴作圆周运动。
(3)刚体的转动规律转动方程ϕ=f(t)角速度ω=dϕ /d t角加速度ε=dω t(4)转动刚体上各点速度和加速度速度V=Rω加速度aτ=Rεa n=Rω2全加速度大小和方向a=√ aτ +a n(5)转动刚体上各点速度和加速度的矢积表示:若沿转轴作出刚体的角速度矢ω和角加速度矢ε,则定轴转动刚体内任一点的速度V=ω⨯ r4142 加速度 a=a τ+a n =ε ⨯ r + ω ⨯ V二、基本要求1、熟练掌握刚体平动的运动特征。
2、熟练掌握刚体的转动规律和转动刚体上各点速度和加速度的求解。
三、典型例题1、曲柄O 1A 和O 2B 的长度均为2R ,分别绕水平固定轴O 1和O 2转动,固连于连杆AB 的齿轮Ⅰ带动齿轮Ⅱ绕O 轴转动。
若已知曲柄O 1A 的角速度为ω、角加速度为ε,O 1O 2=AB , 齿轮Ⅰ和齿轮Ⅱ的半径均为R 。
试求齿轮Ⅱ节圆上任一点D 的加速度。
解 轮Ⅰ与AB 杆固连在一起作平动。
设N 点是轮Ⅰ节圆与轮Ⅱ的接触点,则有 V N =V A =2R ω ;a τN =a τA =2R ε ; a n N =a n A =2R 2ω又设M 点是轮Ⅱ节圆与轮Ⅰ的接触点,因两轮之间无相对滑动,所以有εM τ43V M =V N =2R ω ; a τM = a τN =2R ε因为轮Ⅱ作定轴转动,设其角速度为2ω,角加速度为2ε,则又有 V M = R 2ω,a τM =R 2ε,所以有 2ω=2ω ; 2ε=2ε 轮Ⅱ节圆任一点D 的切向和法向加速度大小分别为 a τD = R 2ε=2R ε ; a n D =R 22ω=4R 2ω 故点D 的加速度大小为 a D =()()222242ωετ+=+R a a nDD方向可由a D 与D 点处半径夹角α的正切表示为 tan α=22ωετ=nDD aa。


五、刚体的定轴转动程英豪5-1 刚体运动的基本概念一、刚体模型刚体:在外力的作用下,大小和形状都不变的物体。
(物体内任意两点的距离不变)二、刚体的运动平动:刚体运动时,其内部任何一条直线,在运动中方向始终不变(各点位移、速度、加速度均相同,可视为质点,刚体质心的运动代表了刚体平动中每一质元的运动)转动:刚体的各个质点都绕同一直线(转动轴)作圆周运动。
质心轴:通过质心的转动轴。
定轴转动:转轴固定不动的转动。
旋进(进动):转轴上一点静止,转轴方向变化。
平面平行运动:刚体内所有运动点都平行于某一平面(参考平面)。
刚体的一般运动:可以视为平动以及转动的合成。
三、转动惯性的量度(转动惯量)1、转动惯量定义:∑∆=iiizrmI2——对z轴的转动惯量连续分布有:⎰=dmrIz2刚体的转动动能:221ωz kI E =转动惯量的物理意义:Iz 表示刚体转动时惯性的大小。
转动惯量Iz 的大小决定于:1)刚体的质量:同形状的刚体,ρ越大,Iz 就越大;(2)质量的分布:质量相同,dm 分布在 r 越大的地方,则Iz 越大; (3)刚体的转轴位置:同一刚体依不同的转轴而有不同的Iz 。
2、、平行轴定理2mdJ J C +=——平行轴定理3、薄板的垂直轴定理z 轴与x 轴、y 轴两两垂直。
4、常见刚体的转动惯量5-2 刚体定轴转动的运动学规律1、角量与线量之间的关系对刚体上的质元 Pi ,2、角速度矢量5-3 刚体定轴转动的动力学规律一、刚体定轴转动定律dtd I M zz ω=(Mz :总外力矩,各外力对转轴对z 轴的力矩代数和) Mz=0 时,刚体将保持静止或匀速(匀角速度)转动。
二、刚体定轴转动的动量矩定理 守恒定律 1.刚体定轴转动的动量矩 刚体对定轴 z 的动量矩:2.刚体定轴转动的动量矩定理I 可变化的质点系或非刚体的定轴转动⎰-=tt z z z I I dt M 00ωω3、刚体定轴转动动量矩守恒注意:(1)守恒条件为M=0;(2)内力矩不改变系统的动量矩;(3)动量矩守恒定律是自然界的一个基本定律。
刚体的基本运动
答案:
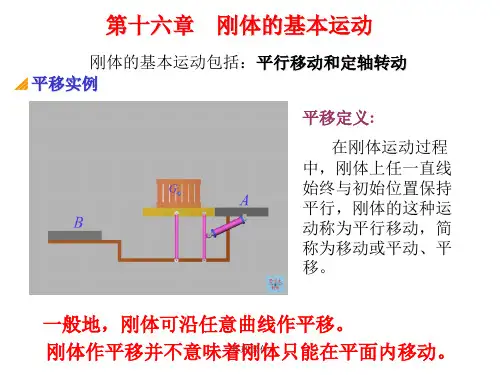
刚体的基本运动形式包括平动、转动(分为定轴转动和非定轴转动)以及平面运动(随质心的平动、绕质心的转动)。
平动是指刚体在运动过程中,整体上以同一速度沿直线运动的现象,其特点是刚体内各点的运动轨迹完全相同。
转动则是刚体绕某一轴心进行旋转的运动,根据轴心的位置不同,可以分为定轴转动和非定轴转动。
平面运动则包括了随质心的平动和绕质心的转动,这种运动形式在工程实际中也是常见的。
复合运动,即平动和转动的组合运动,是刚体运动的一种特殊形式。
例如,自行车在平地上行驶时,既有整车质心的平动,又有轮胎相对于地面的转动。
因此,复合运动确实是刚体的基本运动形式之一。
延伸:
刚体指在运动中和受力作用后,形状和大小不变,而且内部各点相对位置不变的物体。
绝对刚体实际上只是一种理想模型,因为任何物体在受力作用后,都或多或少地变形,如果变形的程度相对于物体本身几何尺寸来说极为微小,在研究物体运动时变形就可以忽略不计。
把许多固体视为刚体,所得到的结果在工程上一般已有足够的准确度。
刚体的特点:刚体上任意两点的连线在平动中是平行且相等的。
刚体上任意质元的位置矢量不同,相差一恒矢量,但各质元的位移、速度和加速度却相同。
因此,常用“刚体的质心”来研究刚体的平动。
第三章刚体力学§3.1 刚体运动的分析§3.2 角速度矢量§3.3 刚体运动微分方程§3.4 刚体平衡方程§3.5 转动惯量§3.6 刚体的平动与定轴转动§3.7 刚体的平面平行运动§3.1 刚体运动的分析一、描述刚体位置的独立变量1.刚体是特殊质点组 dr ij=0,注意:它是一种理想模型,形变大小可忽略时可视为刚体。
2.描述刚体位置的独立变数描述一个质点需(x,y,z), 对刚体是否用 3n 个变量?否,由于任意质点之间的距离不变, 如确定不在同一直线上的三点,即可确定刚体的位置,需 9 个变量,由于两点间的距离保持不变,所以共需 9-3=6 个变量即可。
刚体的任意运动=质心的平动+绕质心的转动,描述质心可用(x,y,z), 描述转轴可由α, β,γ。
二、刚体的运动分类1.平动:刚体在运动过程中,刚体上任意直线始终平行.任意一点均可代表刚体的运动,通常选质心为代表.需要三个独立变量,可以看成质点力学问题.(注意:平动未必是直线运动)2.定轴转动: 刚体上有两点不动,刚体绕过这两点的直线转动,该直线为转轴. 需要一个独立变量φ3.平面平行运动: 刚体上各点均平行于某一固定平面运动。
可以用平行于固定平面的截面代表刚体。
需要三个独立变量。
4.定点运动: 刚体中一点不动,刚体绕过固定点的瞬转转动。
需三个独立的欧拉角。
5.一般运动: 平动+转动§3.2 角速度矢量定轴转动时角位移用有向线段表示,右手法确定其方向.有向线段不一定是矢量,必须满足平行四边形法则,对定点转动时,不能直接推广,因不存在固定轴.ω = lim ∆n=d n刚体在 dt 时间内转过的角位移为 d n ,则角速度定义为角速度反映刚体转动的快慢。
∆t →0 ∆t dt线速度与角速度的关系:d r =d n ⨯r , ∴ v =d rdt=ω ⨯rF 1 F ⨯ M§3.3 刚体运动微分方程一、 基础知识1.力系:作用于刚体上里的集合。
平衡系:使静止刚体不产生任何运动的力系。
等效系:二力系对刚体产生的运动效果相同。
力系的简化:用一简单力系等效地代替一复杂力系称为力系的简化或合成。
二、公理: 1)二力平衡原理:自由刚体在等大、反向、共线二力作用下必呈平衡。
2) 加减平衡力学原理:任意力系加减平衡体系,不改变原力系的运动效应。
3) 力的可传性原理:力沿作用线滑移,并不改变其作用效果,F 与 F `等效。
三、力偶力偶矩1. 力偶:等大、反向、不共线的两个力组成的利系。
力偶所在平面叫力偶面。
2. 力偶矩: 力 F 对任意一点 O 的位置矢量为 r ,则力偶矩为 ,d 为力偶臂。
上式表明:M = r ⨯ F ,其大小为 M=Fd 1) 力偶矩与矩心无关,故 M 可画在过力偶面任意点且与力偶面垂直的直线上,它是一自由矢量; 2) M 的唯一效果是引起转动效应;3) 力偶不能与一力等效.(因为若等效,则可取其作用线上任意一点为矩心,则有 M=0, 发生矛盾). 3. 等效力偶:(1)力偶可在力偶面内任意般动, M 不变时等效; (2)可使 M 不变,改变 F,d, 与原力偶等效。
四、力的平移定理若将作用于刚体上的力 F 平移至同一刚体上不在力 F的作用线上的其它点O ,则必须相应增加一个附加力偶,其力偶矩 M 等于原力 F对平移点O 的矩,才能保证原力对刚体的作用效果。
这一结论称为力的平移定理。
显然 M 垂直于由点O 与原力 F的作用线所作出的 平面。
上述定理的逆定理也成立,即当作用于刚体上某点O的某个力 1 与作用于同一刚体上 的某个力偶的力偶矩 M 垂直时,则该力和力偶可以合成为一个力 F,其力矢与原长 F 相同,平移的垂直方向为1 方向,平移和垂直距离为 M / F 1 。
MF 力的平移定理表明,一个力可以等效于一个力和一个力偶。
而其逆定理则表明,可以将同一平面内的一个力和一个力偶等效于一个力。
力的平移定理是任意力系向某点简化的理论基础。
五、空间任意力系的简化空间任意力系向任一点O (称为简化中心)简化后,一般可得一个力和一个力偶。
其中这个力的作用线过简化中心,其力矢与该力系主矢 R相同,这个力偶的力偶矩与该力系对简化中心的主矩 O 相同。
M 上表说明,力系的主矢R 和主矩 O 完全确定了力系的最简简化结果,由此也就不难理解力系的主矢和主矩为什么是力系两个极其重要的特征量了。
六、平行力系平行力系中心若平行力系存在合力,当平行力系的各力保持其大小和作用点不变,而将它们的作用线沿相同方向转过任意相同角度,所得到的所有平行力系的合力作用线始终通过 的那个唯一确定的点C ,称为平行力系中心。
取力的作用线的某一方向为正向,其单位矢F = F e (i = 1,2,..., n )量为e ,则平行力系中各力可表示为 i i ,若它们的作用点相对于空间某 一确定点O 的矢径为 r(i = 1,2,..., n ) ,则平行力系中心相对于点 O 的矢径公式为r =∑ F ri i ∑ FiF FF 例 沿图示长方体三个互不相交且互不平行的棱边分别作用着力 1 、 2和 3,它们的大小均等于 F ,当它们能简化为一合力时,长方体的长、宽、高的尺寸 a 、b 、c 之间的关系如何? 解 1) 建立图示直角坐标系oxyz2)1= Fi , F = F j , F = Fk于是力系的主矢为23C1 23 = ' i k nnnR = ∑3 i =1= Fi + Fj + F3) 取点O 为简化中心,各力对点O 的矩为m O (F ) = 0 , m O (F ) = -Fci,m O (F) = Fbi - Fa j于是力系对点O 的主矩为3M O = ∑ m O (F i ) = (Fb - Fc )i - Faji =14) 显然 R ≠ 0, M O ≠ 0 ,因此,该力系要简化为一个合力,则必须 R ⋅ M O = 0 ,即F (Fb - Fc ) + F (-Fa ) = 0于是有a =b - c七、刚体运动微分方程取刚体的质心为简化中心,把质点组的质心运动定理和对质心的动量矩定理应用到刚体上,就是刚体运动微分方程,即m a c = F,d J ' = M ' dt,在直角坐标系中为ma = Fma = Fma = FdJ 'x= M ' dJ ' y= M ' dJ 'zM cxxcyycyydtx dty dtz 对保守力系,机械能守恒定律成立,即有 T + V = E §3.4 刚体平衡方程一、刚体的平衡刚体相对于惯性参考系处于静止或匀速直线平动状态,称为物体的平衡。
物体在平衡力系的作用下不一定处于平衡状态,这一点将在动力学中看到,但物体若平衡,则作用于其上的力系必为平衡力系,即力系的平衡仅是物体的平衡的必要条件,而非充分条件。
二、平面任意力系的平衡方程1) 一矩式∑ i =1F ix= 0, ∑i =1F iy= 0, ∑ i =1m A (F i ) = 0其中 x 、y 轴不平行,可以是正交的,也可以是斜交的。
Fnn2) 二矩式n nn ∑ m A (F i ) = 0, ∑ m B (F i ) = 0, ∑ F il = 0 i =1i =1i =1其中 A 、B 两点的连线不与投影轴 l 垂直, F il 表示 F i 在 l 轴上的投影。
3) 三矩式n n n∑ m A (F i ) = 0, ∑ m B (F i ) = 0, ∑ m C (F i ) = 0 i =1i =1i =1其中 A 、B 、C 三点不共线。
三、平面特殊力系的平衡方程1) 平面汇交力系nn∑ Fix= 0, ∑ F iy = 0(1)(2)i =1∑ i =1F ix i =1= 0, ∑ i =1m A (F i ) (其中 x 、y 轴不平行)= 0(其中点 A 与汇交点的连线不与 x 轴垂直)nn∑ m A (F i ) = 0, ∑ m B (F i ) = 0 (3)i =1i =1(其中点 A 、B 与汇交点不共线)2) 平面力偶系∑ M i= 0i =1( M i 为平面力偶系中第i 个力偶的力偶矩,它为一个代数量)3) 平面平行力系(1)∑ i =1 F ix= 0, ∑ i =1m A (F i ) = 0(其中 x 轴不与各力的作用线垂直)nn∑ m A (F i ) = 0, ∑ m B (F i ) = 0 (2)i =1i =1(其中 A 、B 两点的连线不与各力的作用线平行)四、空间任意力系的平衡方程的基本形式∑ i =1F ix = 0, ∑ i =1F iy = 0, ∑ i =1F iz = 0, ∑ i =1m x (F i ) = 0, ∑ i =1m y (F i )= 0, ∑ i =1m z (F i ) = 0n n n n n n n n nnm I = ∑ m c i i z z 空间力系的平衡方程还有其它形式的方程组及相应的附加条件,但讨论起来比较麻烦,一般不作教学要求。
§3.5 转动惯量一、转动动能T =1∑nm (⨯ r ) (⨯ r ) = 1 ∑nm2 r 2sin 2=12∑nm22 i =1ii2 i =1iii2i ii =1I = ∑ 2令i =1则转动动能为T = 12 I2二、转动惯量转动惯量计算公式为:n2i ii =1对刚体可用积分形式I = ⎰ m r 2dm式中i 是质点 m i (dm ) 到 z 轴距离, dm 是微元体的质量。
转动惯量反映物体转动时惯性的大小。
物体的转动惯量,一方面决定于物体的形状,另一方面又决定于转动轴的位置。
平行轴定理I = I + md 2z 轴与 z c 轴平行,两者之间的距离为 d , C 为刚体的质心。
三、惯量张量刚体对坐标轴的轴转动惯量I xx = ⎰ ( y 2 + z 2 )dm ,I yy = ⎰ (z 2 + x 2 )dm ,I zz = ⎰ (x 2 + y 2 )dm惯量积的定义为I xy = I yx = ⎰ xydm ,I yz = I zy = ⎰ yzdm ,I zx = I zx = ⎰ zxdm若刚体绕任一转动轴转动,其相对于坐标轴的方向余弦为α、β、γ ,则刚体绕此转动I = I 2 + I 2 + I 2 - 2I - 2I - 2I轴的转动惯量为xxyyzzxyyzzx3 个轴转动惯量和 6 个惯量积作为统一的一个物理量,来代表刚体转动时惯性的量度,i⎝ ⎪ 1 2 3⎪ 可以排成一个矩阵形式,我们把它叫惯量张量⎛ I xx - I xy - I xz ⎫ -I I - I ⎪ -I yx yy yz ⎪ zx - I zy I zz ⎭⎛ I xx- I xy- I xz⎫⎛⎫-I I - I ⎪ ⎪刚体的转动惯量可表示为 I =(α β γ)⎝yx yy yz zx - I zy I zz ⎪ ⎪ ⎪ ⎭ ⎝ ⎭四、惯量主轴选择适当的坐标轴,可以使惯量积等于零。