航摄像片特殊的点线面
- 格式:pptx
- 大小:3.55 MB
- 文档页数:48
1摄影测量与遥感:从非接触成像和其他传感器系统,通过记录、测量、分析与表达等处理,获得地球及其环境和其他物体可靠信息的工艺、科学与技术。
2摄影测量的特点:(1)无需解除物体本身获得被摄物体信息. (2)由二维影响重建三维目标. (3)面采集数据形式. (4)同时提取物体的几何与物理特性4.摄影测量的技术手段有模拟法、解析法与数字法;摄影测量也经历了模拟摄影测量、解析摄影测量与数字摄影测量三个发展阶段1空中三角测量:利用航摄像片与所摄目标之间的空间几何关系,根据少量像片控制点,计算待求点的平面位置、高程和像片外方位元素的测量方法。
2像点位移:由于在实际航空摄影时,在中心投影的情况下,当航摄的飞行姿态出现较大倾斜即像片有倾斜,地面有起伏时,便会导致地面点在航摄像片上构像相对于在理想情况下的构像,产生了位置的差异,这一差异称为像点位移。
3摄影基线:航线方向相邻两个摄影站点间的空间距离。
4航向重叠:同一条航线上,相邻两张像片应有一定范围的影像重叠,称为航向重叠。
5旁向重叠:相邻航线相邻两像片的重叠度6同名核线:同一核面与左右影像相交形成的两条核线,其中核面指物方点与摄影基线所确定的平面。
7像片的内方位元素:表示摄影中心与像片之间相互位置的参数,f,x0,y08像片的外方位元素:表示摄影中心和像片在地面坐标系中的位置和姿态的参数。
9相对定向:根据立体像对内在的几何关系恢复两张像片之间的相对位置和姿态,使同名光线对对相交,建立与地面相似的立体模型。
即确定一个立体像对两像片的相对位置。
10绝对定向元素:描述立体像对在摄影瞬间的绝对位置和姿态的参数。
13同名像点:同名光线在左右相片上的构像填空1、4D产品是指 DEM、DLG、DRG、DOM。
2、摄影测量按用途可分为地形摄影测量、非地形摄影测量。
4、模拟摄影测量是利用光学/机械投影方法实现摄影过程的反转。
5、解析摄影测量以电子计算机为主要手段,通过对摄影像片的量测和解析计算方法的交会方式来研究和确定被摄物体的形状、大小、位置、性质及其相互关系,并提供各种摄影测量产品的一门科学。
《摄影测量学》课程笔记第一章绪论一、摄影测量学的基本概念1. 定义摄影测量学是一种通过分析摄影图像来获取地球表面及其物体空间位置、形状和大小等信息的科学技术。
它结合了光学、数学、计算机科学和地理信息科学等多个领域的知识,为地图制作、资源管理、环境监测和工程建设等领域提供精确的数据。
2. 分类- 地面摄影测量:使用地面上的摄影设备进行的摄影测量,适用于小范围或精细的测量工作。
- 航空摄影测量:利用飞行器(如飞机、无人机)搭载摄影设备进行的摄影测量,适用于大范围的地形测绘。
- 卫星摄影测量:通过卫星搭载的传感器获取地球表面信息,适用于全球或大区域的环境监测和资源调查。
3. 应用领域- 地图制作:制作各种比例尺的地形图、城市规划图和专题地图。
- 土地调查:进行土地分类、土地权属界定和土地使用规划。
- 城市规划:辅助城市设计和基础设施规划。
- 环境监测:监测环境变化,如森林覆盖、水资源和污染状况。
- 灾害评估:评估自然灾害的影响范围和损失。
- 军事侦察:获取敌对地区的地理信息。
二、摄影测量学的发展历程1. 早期摄影测量(19世纪中叶-20世纪初)- 1839年,法国人达盖尔发明了银版照相法,这是摄影技术的起源。
- 1851年,瑞士工程师普雷斯特勒使用摄影方法绘制了第一张地形图。
- 1859年,法国人布洛克发明了立体测图仪,使得通过摄影图像进行三维测量成为可能。
2. 现代摄影测量(20世纪初-20世纪末)- 20世纪初,德国人奥佩尔提出了像片纠正和像片定向的理论,为摄影测量学的理论基础做出了贡献。
- 1930年代,随着航空技术的发展,航空摄影测量开始广泛应用。
- 1950年代,电子计算机的出现为摄影测量数据的处理提供了新的工具。
- 1960年代,数字摄影测量开始发展,利用计算机技术进行图像处理和分析。
3. 空间摄影测量(20世纪末-至今)- 1970年代,卫星遥感技术开始应用于摄影测量,提供了全球范围内的地理信息。
第一章1 摄影测量学:是利用光学摄影机获取的像片,经过处理以获取被摄物体的形状、大小、位置、特性及其相互关系的一门学科。
2 摄影测量学的主要任务:测制各种比例尺的地形图,建立地形数据库,为地理信息系统,各种工程应用提供基础测绘数据。
3 摄影测量学发展的三个阶段:模拟摄影测量,解析摄影测量 ,数字摄影测量。
第二章1 航空摄影机具有框标目的:是建立像片的直角框标坐标2摄影机主距 :摄影机物镜的中心到像主点的垂距,基本上等于物镜焦距。
一般用f 表示3像场内,圆内接正方形或矩形称为最大像幅,尺寸:18X18cm,23X23cm,30X30cm第三章1 摄影比例尺(像片比例尺):航摄像片上一线段为l 与地面上相应线段的水平距L 之比。
2 当取摄区内的平均高程面作为摄影基准面时,摄影机的物镜中心至该面的距离为摄影行高,用H 表示。
f 为摄影机主距,H 为航高3 航向重叠:同一航线内相邻像片上具有同一地区影像的部分一般情况下,要求航向重叠度最小不能少于53%,最好为60%-65%旁向重叠:相邻航线的相邻像片上具有同一地区影像的部分一般情况下,旁向重叠度不得少于15%,保持在30%-40%之间。
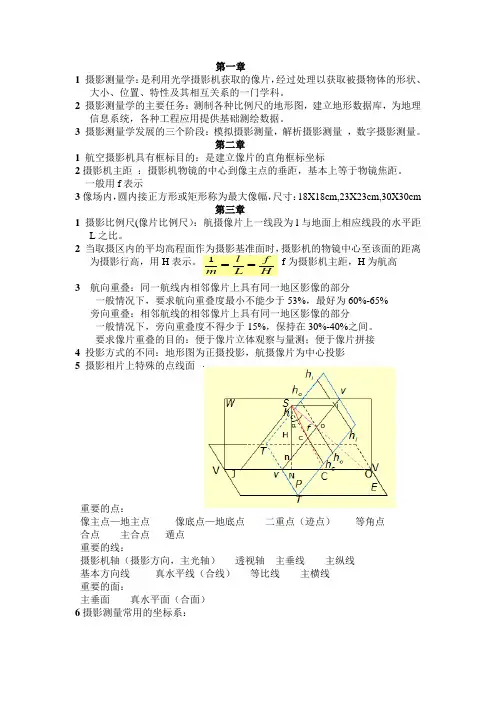
要求像片重叠的目的:便于像片立体观察与量测;便于像片拼接4 投影方式的不同:地形图为正摄投影,航摄像片为中心投影5 摄影相片上特殊的点线面重要的点:像主点—地主点 像底点—地底点 二重点(迹点) 等角点 合点 主合点 遁点重要的线:摄影机轴(摄影方向,主光轴) 透视轴 主垂线 主纵线基本方向线 真水平线(合线) 等比线 主横线重要的面:主垂面 真水平面(合面)6摄影测量常用的坐标系:H f L l m ==1像方坐标系:用于描述像点的位置。
1像平面坐标系:是以象主点o 为坐标原点x 、y 轴分别平行于框标坐标系的x 、y 轴。
2像空间坐标系:原点:投影中心S 坐标轴:Z 轴与摄影方向So 重合,朝上为正方向;x 和y 轴分别平行于像平面坐标的相应轴,方向一致。
《摄影测量》课程期末统一考试题(卷)[B]一、名词解释(20分,每个4分)1、单片空间后方交会:在摄影之后,利用一定数量的地面控制点,根据共线方程条件方程式反求像片的外方位元素。
P502、同名核线:同一核面与左、右两像片相交的两条核线称为同名核线。
P723、影像匹配:4、影像的外方位元素:在恢复内方位元素(即恢复了摄影光束)的基础上,确定摄影光束在摄影瞬间的空间位置和姿态的参数,称为外方位元素,一张像片的外方位元素包括六个参数,其中三个是直线元素,用于描述摄影中心的空间坐标值;另外三个是角元素,用于描述像片的空间姿态。
P375、解析相对定向:根据同名光线对对相交这一立体像对对内在的几何关系,通过测量的像点坐标,用解析计算的方法解求相对定向元素,建立于地面相似的立体模型,确认模型点的三维坐标。
P77(相对定向与像片的绝对位置无关,不需要地面控制点)二、填空题(20分,每空1分)1、表示航摄像片的外方位角元素可以采用、和三种转角系统。
2、航摄像片是所覆盖地物的中心投影投影,地形图是所表示内容的正射投影投影。
3、摄影测量加密按数学模型可分为航带法、独立模型法和光束法三种方法。
4、摄影测量中常用的坐标系有像平面坐标系、像空间坐标系、像空间辅助坐标系、摄影测量坐标系、地面摄影测量坐标系和地面测量坐标系。
5、要将地物点在摄影测量坐标系中的模型坐标转换到地面摄影测量坐标系,最少需要个和个地面控制点。
6、摄影测量的发展经历了模拟摄影测量、解析摄影测量和数字摄影测量三个阶段。
三、简答题(30分)1、请说明实现自动相对定向的方法原理和关键技术2、什么是数字高程模型?并说明DEM的几种常用的表示形式及特点。
四、综合题(30分)1、推导摄影中心点、像点与其对应物点三点位于一条直线上的共线条件方程,说明式中各符号的意义,用图示意航摄像片的内、外方位元素,并简要叙述以上方程在摄影测量中的主要用途。
2、简述一种框幅式航空影像制作其核线影像的方法。
《摄影测量学》复习提纲1摄影测量:是利用摄影机或其他传感器采集被测对象的图像信息,经过加工处理和分析,获取有价值的可 靠信息的理论和技术。
2、 数字摄影测量: 基于摄影测量的基本原理,通过对所获取的数字 /数字化影像进行处理自动(半自动)提取 被摄对象用数字方式表达的几何与物理信息,从而获得各种形式的数字化产品和目视产品。
3、 摄影测量发展的三个阶段: (1) 模拟摄影测量 (2) 解析摄影测量 (3) 数字摄影测量4、 主光轴:透镜中心的连线。
5、 航空摄影测量的要求: (1) 像片倾斜角:应该小于 3°;(2) 航摄比例与航高:同一航线内各摄影站的航高差不得大于 50米;(3) 像片重叠度:航向重叠度一般规定为 60%最小不得小于 53%最大不得大于 75%旁向重叠度一般规定 为30% 最小不得小于 15% 最大不得大于 50% (4) 航线弯曲度:通常不得大于 3%(5) 像片旋偏角:一般不得大于 6°,个别允许达到 8°,连续三张不得超过 6 °。
6、 透视变换中特殊的点、线、面(注意点线面之间的关系) :(1) 摄影方向线:过投影中心且垂直于像面的方向线; (2) 像主点:摄影方向线与像面的交点; (3) 地主点:摄影方向线与物面的交点; (4) 像底点:过透视中心的铅垂线与像面的交点; (5) 地底点:过透视中心的铅垂线与物面的交点;(6) 主合点:过透视中心所做基本方向线的平行线与像面的交点; (7) 像片主距:摄影机物镜后节点到像片主点的垂距;(8) 等角点:过透视中心所做倾斜角 a 的二等分线与像(物)面的交点。
(9) 迹线:像面与物面的交线。
(10) 迹点:迹线上的所有点。
(11) 主纵线:主垂面与像面的交线。
7、相对高摄影机物镜相对于某一基准面的高相邻航线间的重叠影像部分与像片边长比值的百分数。
相邻像片主点的连线与同方向像片边框方向的夹角。
航空像片的判读当系统地研究航空像片时,常涉及到像片所显示的地物特征的几项基本特征。
判读时则应根据这些特征和判读项目要求去进行识别。
因此,掌握判断特征及其各种因素的影响,对像片判读有着重要意义。
一、形状特征影像的形状是指地物在像片上表现出来的外部形态、结构和轮廓。
地物影像可按形状分为:点状、线状、面状三种。
复杂的地物也是由于这些点、线、面等要素结合而成的。
同时地物的形状还受中心投影的影响,使具有一定高度的地物反应在像片的不同部位,其影像的形状有所不同。
如一棵树,反映在航片的中心部位呈圆形树冠影响;而若处于像片的四角时,则反映了这棵树的不同侧面,会得到不同形状的影像。
二、大小特征地物除具有一定的形状外,还有一定的大小。
根据地物影像的形状及其大小可以较确切地识别出地物的不同类型。
像片上物体的大小,须同像片的比例尺一起考虑。
在像片的比例尺一定的情况下,影像的大小反映了实地物体的大小,从而据以判定物体的性质。
三、色调特征面物体呈现出各种自然颜色。
在黑白像片上其色调是以不同的黑度层次来表现的。
这种黑度差别,称为色调。
影像的色调反映了地面物体的色彩或相对亮度,它与感光材料的感光特性有关,此外还受其他条件的影响,如阳光照射的角度不同,物体表面反射到底片上的光量也不同。
常见山脊两面的山坡,向阳面色调淡,背阳面色调暗,两者对比有较明显区别。
四、阴影特征当光线斜射到高出地面物体上时,物体就会产生阴影。
阴影在像片上同样也有其影像,他的方向取决于太阳光的照射方向。
在同一张像片上,各地物阴影的影像方向均一致。
阴影对高山地物判别特别有用。
特别是当物体较小,又与周围物体的影像缺乏色调上的差异时,阴影特征显得特别重要。
利用阴影特征判读像片时,不能单纯以阴影的大小作为判读物体高矮的唯一标志,因为阴影的大小除与物体高低有关外,还与阳光照射的角度和地面的坡度有关。
五、相关位置特征前述四种特征,均对物体本身而言,没有考虑它与周围地物间相互关系。
1、地面摄影测量坐标系:x轴沿着航线方向,z 轴沿铅垂线方向,y 轴符合右手定则。
2、4D产品:DEM:数字高程模型DLG:数字线划地图(矢量图)DRG:数字栅格地图(栅格图) DOM :数字正射影像图3、摄影测量分类:①按距离远近分:航天、航空、地面、近景、显微;②按用途:地形、非地形;③按处理手段:模拟,解析,数字4、摄影测量特点:①无需接触物体本身获得被摄物体信息②由二维影像重建三维目标③面采集数据方式④同时提取物体的几何与物理特性5、航向重叠度:同一航线上,相邻两像片应有一定范围的影像重叠6、摄影基线:航向相邻两个摄影站间的距离7、摄影比例尺:摄影像片水平,地面取平均高程,像片上的线段 l 与地面上相应的水平距 L 之比8、航片与地形图的区别:①比例尺:地图有统一比例尺,航片无统一比例尺;②表示方式:地图为线划图,航片为影像图;③表示内容:都地图需要综合取舍;④几何差异:航摄像片可组成像对立体观察9、航摄像片中的重要点线面:点:S(摄影中心)o(像主点) O(地主点) n(像底点) N (地底点)c(等角点)C(地面等角点)i(主合点)j(主遁点);线:TT(迹线)SoO(主光线) SnN(主垂线) VV(摄影方向线) vv(主纵线) ScC(等角线) hihi(主合线) hoho(主横线) hchc(等比线);面: E(地面) P(像片面) W(主垂面) Es(真水平面)10、摄影测量5个常用坐标系:①像平面直角坐标系②像空间直角坐标系③地面测量坐标系④像空间辅助坐标系⑤地面摄影测量坐标系11、像片内方位元素:确定摄影物镜后节点与像片之间相互位置关系的参数(内方位元素( x0, y0, f )可恢复摄影光束)12、像片外方位元素 :确定摄影瞬间像片在地面直角坐标系中空间位置和姿态的参数13、外方位线元素:描述摄影中心在地面空间直角坐标系中的位置14、外方位角元素:描述像片在摄影瞬间的空间姿态15、像片外方位角元素:以Y轴为主轴以X轴为主轴以Z轴为主轴~w ~ k转角系统。
航空摄影测绘图像的特征解读与应用技巧航空摄影测绘是一种将摄影测量技术与航空技术相结合的综合性测绘方法。
通过航空摄影测绘,可以获取大范围、高分辨率的地理信息图像,为城市规划、资源调查、环境监测等领域提供了重要的数据支撑。
本文将探讨航空摄影测绘图像的特征解读与应用技巧。
一、图像特征解读航空摄影测绘图像的特征解读是理解图片含义和有效利用数据的基础。
图像特征包括颜色、纹理、形状和空间关系等。
首先,颜色是图像特征的基础。
通过颜色可以判断图像中目标物体的类别。
例如,绿色可以表示植被,蓝色可以表示水体,灰色可以表示建筑物等。
此外,各类目标物体的颜色具有一定的区分度,可以通过颜色信息对目标进行分类和识别。
其次,纹理是图像特征的另一个重要方面。
纹理包括物体表面的细节、纹路和纹理规律等。
通过纹理特征,可以判断图像中不同材质的物体。
例如,建筑物的纹理与植被的纹理存在明显差异,可以通过纹理特征将二者区分开来。
再次,形状是图像特征的重要指标。
通过形状可以判断图像中不同物体的轮廓和结构。
例如,圆形可以表示圆形建筑物,长方形可以表示长方形的建筑物等。
形状特征在目标识别和三维建模等方面具有重要作用。
最后,空间关系是图像特征解读的关键要素。
空间关系包括物体在图像中的相对位置和相互关系。
通过空间关系可以确定不同物体之间的距离和相对方位。
例如,通过判断建筑物与道路之间的空间关系,可以推测道路的宽度和建筑物的大小。
二、应用技巧航空摄影测绘图像的应用技巧主要包括目标识别、地形分析和三维建模三个方面。
目标识别是航空摄影测绘图像中重要的应用之一。
通过图像特征解读,可以对目标物体进行分类和识别。
例如,在城市规划中,可以利用航空摄影测绘图像识别建筑物、道路、绿化等目标,为城市规划提供基础数据。
地形分析是航空摄影测绘图像的另一个重要应用。
通过解读图像特征,可以分析地形特征,包括山脉、河流、湖泊等地形要素。
地形分析在地质勘探、土地利用规划等领域具有重要作用。
872摄影测量与遥感综合考试大纲(2018版)一、考试组合摄影测量与遥感综合包含摄影测量基础、数字图像处理、遥感原理与应用三个科目,任选两个科目,每个科目分数分别为75分,总分150分。
二、摄影测量基础部分考试大纲主要内容及基本要求1.摄影测量的基本概念和基础知识主要内容:摄影测量的定义、任务、发展概况;摄影测量常用坐标系、成像模型等。
基本要求:掌握摄影测量学科的定义、基本任务、发展过程;熟悉摄影测量常用坐标系的建立、中心投影构像方程的建立。
2.单张航摄像片解析主要内容:航摄像片上的特殊点线面、航摄片段内、外方位元素、空间直角坐标变换、航摄片的像点位移与比例尺、单张航片的空间后方交会。
基本要求:熟悉航空摄影中的基本几何关系、熟练掌握空间直角坐标变换、掌握单张航片的空间后方交会方法。
3.双像解析摄影测量主要内容:航摄像对的立体观察与测量、双像解析摄影测量的任务与方法、立体像对的前方交会、双像解析计算的空间后交-前交方法、解析法相对定向、模型点坐标的计算、解析法绝对定向、光束法双像解析摄影测量、解析法空中三角测量。
基本要求:熟悉双像解析摄影测量的任务与方法、熟练掌握立体像对的前方交会、双像解析计算的空间后交-前交方法、解析法相对定向、解析法绝对定向、光束法双像解析摄影测量、解析法空中三角测量。
4.数字摄影测量主要内容:基本概念,数字图像与影像重采样、基于灰度的影像相关、基于特征的影像匹配、同名核线的确定与核线相关。
基本要求:掌握数字摄影测量与模拟、解析摄影测量的区别与联系,熟练掌握基于灰度的影像相关方法、基于特征的影响匹配,掌握核线相关的方法。
5.测图原理及测图仪器主要内容:立体测图方法、模拟法测图原理、模拟测图仪的结构与分类;解析测图方法、解析法测图原理、解析测图仪的结构与分类。
基本要求:掌握各种测图方法及仪器的原理。
6.数字高程模型及其应用主要内容:基本概念,数据点的获取、预处理、存储,曲面的内插和逼近、曲线内插与逼近、等高线的绘制。