模糊神经PID融合的控制策略的工程应用资料
- 格式:doc
- 大小:517.89 KB
- 文档页数:17


基于模糊—PID智能化控制系统的应用作者:任黎明张凤营于红来源:《艺术科技》2012年第06期摘要:随着先进控制技术的发展,模糊控制理论和模糊控制技术成为最广泛最有前景的应用分支之一。
模糊控制器是一种专家型控制系统,它的优点是不需要知道被控对象的精确数学模型,而是只利用专家己有的知识和经验,更重要的是当系统为非线性系统时,模糊控制器还可以产生非线性控制作用。
但经过深入研究,发现常规模糊控制存在着其控制品质粗糙和精度不高等弊病,因此,可将模糊控制和PID控制两者结合起来,扬长避短,既具有模糊控制灵活、适应性,又具有PID控制精度高的特点。
关键词:PID控制;模糊控制器;模糊—PID控制器1PID控制器PID(比例-积分-微分)控制器作为最早实用化的控制器已有50多年历史,现在仍然是应用最广泛的工业控制器。
传统的PID控制器以其结构简单、工作稳定、适应性好、精度高等优点成为过程控制中应用最广泛最基本的一种控制器。
1.1PID的组成控制器由比例单元(P)、积分单元(I)和微分单元(D)组成。
它由于用途广泛、使用灵活,已有系列化产品,使用中只需设定三个参数(Kp,Ki和Kd)即可。
在很多情况下,并不一定需要全部三个单元,可以取其中的一到两个单元,但比例控制单元是必不可少的。
1.2PID的特点虽然很多工业过程是非线性或时变的,但通过对其简化可以变成基本线性和动态特性不随时间变化的系统,这样PID就可控制了。
另外,PID参数Kp,Ki和Kd可以根据过程的动态特性及时整定,如果过程的动态特性变化,例如可能由负载的变化引起系統动态特性变化,PID参数就可以重新整定。
2模糊控制器模糊控制器是一种专家型控制系统,它的优点是不需要知道被控对象的精确数学模型,而是只利用专家己有的知识和经验,更重要的是当系统为非线性系统时,模糊控制器还可以产生非线性控制作用。
它运用语言知识模型进行控制算法的设计,可用来对不能精确建模或难以建模系统进行控制,使生产过程平稳、高效、安全地运行。

基于神经网络的模糊PID控制器设计与实现随着科技的不断发展,控制技术在工业自动化中的应用越来越广泛。
PID控制器因其简单易懂、易实现的特点而被广泛使用,但是传统的PID控制器在某些场合下会出现失效的情况。
为了解决这一问题,研究者们开始着手开发基于神经网络的模糊PID控制器。
本文将介绍基于神经网络的模糊PID控制器的设计与实现。
一、控制器介绍基于神经网络的模糊PID控制器是一种新型的控制器,它将模糊控制的优点与神经网络的处理能力相结合,形成了一种高效的自适应控制器。
该控制器利用神经网络的学习算法实现自适应参数的调节,将模糊控制中的模糊规则与神经网络的处理能力相结合,形成一种新的控制方法。
该控制器的核心思想是利用神经网络对系统进行建模,通过学习算法自适应地调节系统参数,从而实现对系统的控制。
其中,模糊控制器用于对输出进行模糊处理,神经网络用于对输入和输出进行处理,从而实现对系统的控制。
二、控制器设计基于神经网络的模糊PID控制器的设计需要以下几个步骤:1.系统建模系统建模是设计基于神经网络的模糊PID控制器的第一步。
系统建模的目的是构建系统的数学模型,以便于后续的设计过程。
在建模过程中,需要考虑系统的类型、运动方程、非线性因素等因素。
2.控制器设计控制器的设计是基于神经网络的模糊PID控制器设计的核心。
控制器的设计包括神经网络的结构设计、神经网络权值的选择、模糊控制的设计等。
3.参数调节参数调节是控制器设计的重要环节。
由于系统的运动方程等因素的影响,不同系统的参数可能不同。
因此,在实际应用中需要根据实际情况对控制器进行参数调节。
三、控制器实现基于神经网络的模糊PID控制器的实现需要以下步骤:1.数据采集数据采集是基于神经网络的模糊PID控制器实现的第一步。
数据采集的目的是获取系统的输入输出,以便为神经网络提供数据。
2.神经网络训练神经网络训练是实现控制器的关键步骤。
在训练过程中,通过对神经网络进行学习,让它逐渐对系统的输入输出进行建模。
1.1课题研究背景及意义伴随着现代工业的快速发展,标志着一个国家工业实力的相应设备如精密机床、工业机器人等对其“驱动源”一电伺服驱动系统提出了越来越高的要求。
而基于正弦波反电势的永磁同步电动机(简称PMSM)因其卓越的性能已日渐成为电伺服系统执行电动机的“主流”[1],随着现代电力电子技术、微电子技术及计算机技术等支撑技术的快速发展,以永磁同步电动机作为执行机构的交流伺服驱动系统的发展得以极大的迈进。
然而伺服控制技术是决定交流伺服系统性能好坏的关键技术之一,是国外交流伺服技术封锁的主要部分。
随着国内交流伺服电机及驱动器等硬件技术逐步成熟,以软形式存在于控制芯片中的伺服控制技术成为制约我国高性能交流伺服技术及产品发展的瓶颈。
研究具有自主知识产权的高性能交流伺服控制技术,尤其是最具应用前景的永磁同步电动机伺服控制技术,具有重要的理论意义和实用价值[2,3]。
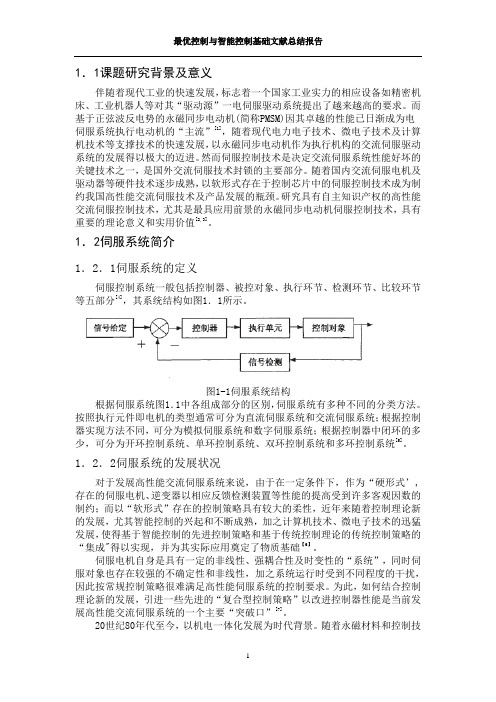
1.2伺服系统简介1.2.1伺服系统的定义伺服控制系统一般包括控制器、被控对象、执行环节、检测环节、比较环节等五部分[4],其系统结构如图1.1所示。
图1-1伺服系统结构根据伺服系统图1.1中各组成部分的区别,伺服系统有多种不同的分类方法。
按照执行元件即电机的类型通常可分为直流伺服系统和交流伺服系统;根据控制器实现方法不同,可分为模拟伺服系统和数字伺服系统;根据控制器中闭环的多少,可分为开环控制系统、单环控制系统、双环控制系统和多环控制系统[5]。
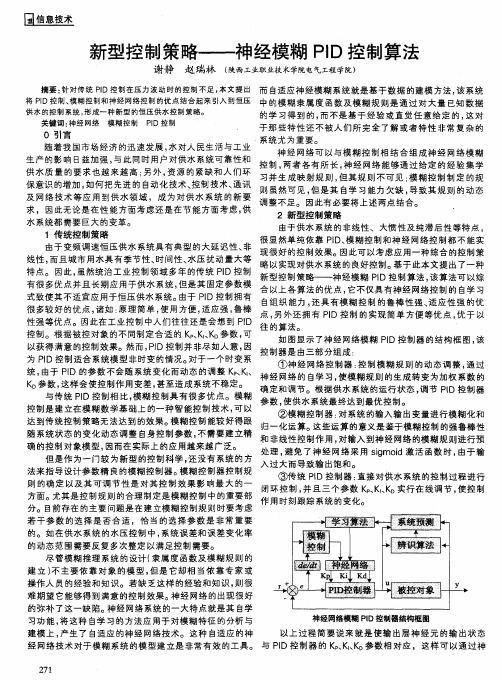
1.2.2伺服系统的发展状况对于发展高性能交流伺服系统来说,由于在一定条件下,作为“硬形式’,存在的伺服电机、逆变器以相应反馈检测装置等性能的提高受到许多客观因数的制约;而以“软形式”存在的控制策略具有较大的柔性,近年来随着控制理论新的发展,尤其智能控制的兴起和不断成熟,加之计算机技术、微电子技术的迅猛发展,使得基于智能控制的先进控制策略和基于传统控制理论的传统控制策略的“集成"得以实现,并为其实际应用奠定了物质基础【6】。
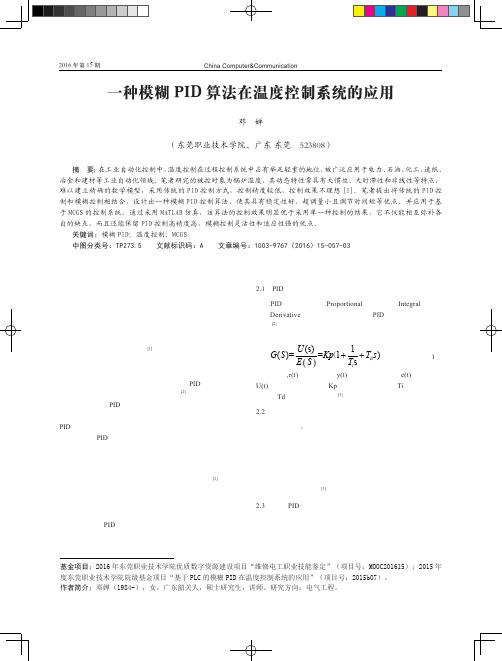
图1 模糊PID控制器的结构图
本控制系统采用铂热电阻(PT100)温度传感器用于检测锅炉的实际温度,通过转换器转换成电信号,再经过温
度检测模块转换成相应的数字信号送到处理器(西门子S7-200),利用组态软件(MCGS)的界面显示温度值,通过与给定的温度值进行比较,采用模糊PID控制算法进行计算和处理,经过控制输出器得到三条输出控制信号,从而实现对锅炉温度的连续控制。
假设锅炉温度为20℃~80℃,因此E≥50℃,模糊控
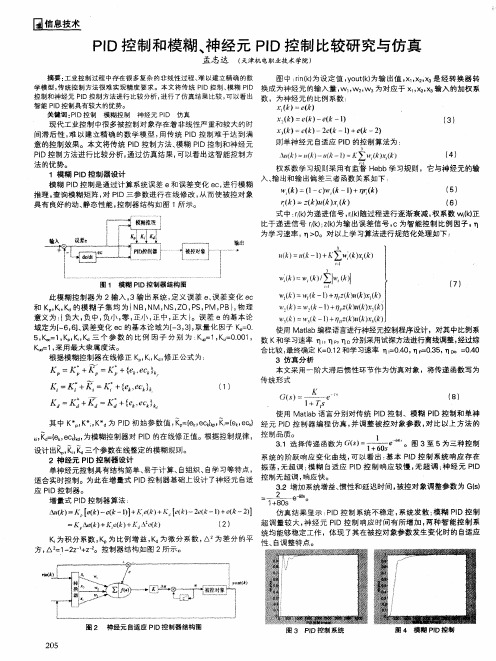
图2 三种控制方法的仿真曲线图
黄色曲线为传统PID控制响应结果,紫色曲线为模糊控制的响应结果,绿色曲线为模糊 PID控制响应结果。
从图中可以看出基于模糊PID控制器的系统的指标为:调节时间Ts=300秒,稳态误差ess=0。
由三者的曲线对比可看出,采用模糊PID的方法来控制
图3 控制系统组态仿真图
(下转第65页)。

PID控制和模糊\神经元PID控制比较研究与仿真工业控制过程中存在很多复杂的非线性过程、难以建立精确的数学模型,传统控制方法很难实现精度要求。
本文将传统PID控制、模糊PID控制和神经元PID控制方法进行比较分析,进行了仿真结果比较,可以看出智能PID控制具有较大的优势。
标签:PID控制模糊控制神经元PID 仿真现代工业控制中很多被控制对象存在着非线性严重和较大的时间滞后性,难以建立精确的数学模型,用传统PID控制难于达到满意的控制效果。
本文将传统PID控制方法、模糊PID控制和神经元PID控制方法进行比较分析,通过仿真结果,可以看出这智能控制方法的优势。
1 模糊PID控制器设计模糊PID控制是通过计算系统误差e和误差变化ec,进行模糊推理,查询模糊矩阵,对PID三参数进行在线修改,从而使被控对象具有良好的动、静态性能,控制器结构如图1所示。
此模糊控制器为2输入,3输出系统,定义误差e、误差变化ec和Kp,Ki,Kd的模糊子集均为{NB,NM,NS,ZO,PS,PM,PB},物理意义为:{负大,负中,负小,零,正小,正中,正大}。
误差e的基本论域定为[-6,6]、误差变化ec的基本论域为[-3,3],取量化因子Ke=0.5,Kec=1,Kp,Ki,Kd三个参数的比例因子分别为:Kup=1,Kui=0.001,Kud=1,采用最大隶属度法。
2 神经元PID控制器设计单神经元控制具有结构简单、易于计算、自组织、自学习等特点,适合实时控制。
为此在增量式PID控制器基础上设计了神经元自适应PID控制器。
增量式PID控制器算法:Ki为积分系数,Kp为比例增益,Kd为微分系数,△2为差分的平方,△2=1-2z-1+z-2。
控制器结构如图2所示。
图中:rin(k)为设定值,yout(k)为输出值,x1,x2,x3是经转换器转换成为神经元的输入量,w1,w2,w3为对应于x1,x2,x3输入的加权系数,为神经元的比例系数:则单神经元自适应PID的控制算法为:权系数学习规则采用有监督Hebb学习规则,它与神经元的输入、输出和输出偏差三者函数关系如下:式中:ri(k)为递进信号,ri(k)随过程进行逐渐衰减,权系数wi(k)正比于递进信号ri(k);z(k)为输出误差信号,c为智能控制比例因子,η 为学习速率,η>0。

目录第1章概述 (1)1.1引言 (1)1.2PID控制概述 (1)1.3模糊技术概述 (3)1.4模糊技术整定PID参数 (4)第2章传统PID控制 (5)2.1引言 (5)2.2传统PID控制器 (5)2.3传统PID控制系统的组成 (6)2.4PID控制的仿真及分析 (9)第3章模糊自适应PID控制 (12)3.1引言 (12)3.2模糊自适应PID控制 (12)3.3仿真程序及其分析 (21)结论 (28)参考文献 (29)致谢 (30)附录1 (31)附录2 (33)附录3 (39)第1章 概述1.1 引言在现代工业控制领域中,很多情况下,都采用PID 控制,PID 控制算法的实现不仅可以用软件实现,而且可以用计算机的逻辑功能实现,所以在工业过程中得到广泛应用。
但在有些方面从在许多不足,在控制过程中容易受到外界干扰而使控制系统不稳定,这就需要对控制参数进行整定,本文就是用模糊技术对PID 参数进行整定,以使系统达到稳定,来达到我们所需要的效果。
1.2 PID 控制概述PID 控制是当今在工业过程控制中使用最基本的一种控制方法,他由于控制简单,容易操作所以的到广泛的应用。
PID 控制发展到今天,已经开发出很多类型的PID 控制器,如具有PID 参数自整定功能的智能调节器 (intelligent regulator),其中PID 控制器参数的自动调整是通过智能化调整或自校正、自适应算法来实现。
有利用PID 控制实现的压力、温度、流量、液位控制器,能实现PID 控制功能的可编程控制器(PLC),还有可实现PID 控制的PC 系统等等。
可编程控制器(PLC) 是利用其闭环控制模块来实现PID 控制,而可编程控制器(PLC)可以直接与Control Net 相连,如Rockwell 的PLC-5等。
PID (比例-积分-微分)控制器作为最早实用化的控制器已有50多年历史,现在仍然是应用最广泛的工业控制器。

编号:实验一普通PI控制方法的设计与实现一、实验目的1. 掌握数字PI及其算法的实现2. 熟悉在在keil环境下进行单片机程序的设计3. 熟悉仿真软件protues的使用二、实验设备及条件1. 计算机系统2. 编程软件keil4和仿真软件protues7.8三、实验原理及其实验步骤(1) PID算法的数字化实现在模拟系统中,PID算法的表达式为u(t)=K P[e(t)+1T I∫e(t)dt+T Dde(t)dt]式中u(t):调节器的输出信号;e(t):调节器的偏差信号,它等于测量值与给定值之差;Kp:调节器的比例系数;T I:调节器的积分时间;TD:调节器的微分时间;离散化的PID为:u(k)=K P[e(k)+TT I∑e(j)kj=0+T DT(e(k)−e(k−1))]Δt=T:采样周期,必须使T足够少,才能保证系统有一定的精度;E(k):第K次采样时的偏差值;E(k-1) :第K-1次采样时的偏差值;K:采样序号,K=0,1,2……;P(k-1):第K次采样时调节器的输出;上式计算复杂,经过化简为:u(k)=u(k−1)+K P[e(k)−e(k−1)]+K I e(k)+K D[e(k)−2e(k−1)+e(k −2)]式中:K I=K P TT I为积分系数K D=K P T DT为微分系数要计算第K次输出值u(k),只需要知道u(k-1),e(k),E(k-1),e(k-2)即可。
上式也称为位置型PID的位置控制算法。
在很多控制系统中,由于执行机构是采用布进电机进行控制,所以只要给一个增量信号即可。
因此得到增量型PID的位置控制算法。
∆u=K P[e(k)−e(k−1)]+K I e(k)+K D[e(k)−2e(k−1)+e(k−2)] (2) 控制系统的结构框图整个系统的控制框图如下所示:图1 PID控制系统结构框图在本次设计中,经过计算,被控对象的传递函数是:G(s)=1 (SCR)2+3SCR+1其中:C=10uf,R=20K;带入上式后可得:G(s)=10.04S2+0.6S+1显然是一个二阶系统。


模糊pid控制实例【原创实用版】目录一、引言二、模糊 PID 控制的概念和原理三、模糊 PID 控制的实例应用四、模糊 PID 控制的优势和局限性五、结论正文一、引言在工业控制领域,PID 控制器是一种常用的闭环控制系统,它通过比较实际输出值和期望输出值之间的误差,然后对控制量进行调整,以达到期望的输出值。
然而,在面对一些非线性、时变性、不确定性的系统时,传统的 PID 控制器可能无法满足控制需求。
因此,为了解决这些问题,模糊 PID 控制应运而生。
二、模糊 PID 控制的概念和原理模糊 PID 控制结合了传统 PID 控制和模糊控制的优点,它利用模糊控制理论对 PID 控制器进行改进,使其具有更强的适应性和鲁棒性。
模糊 PID 控制的原理主要基于模糊逻辑和 PID 控制算法,通过将连续的输入值转换为模糊集合,然后根据模糊规则进行推理,最后得到模糊输出,再通过模糊 - 清晰转换得到清晰的控制量。
三、模糊 PID 控制的实例应用模糊 PID 控制在许多实际应用中都取得了良好的效果,例如温度控制系统、液位控制系统、速度控制系统等。
以温度控制系统为例,当实际温度与期望温度存在偏差时,模糊 PID 控制器会根据偏差的大小、方向和变化趋势,调整加热器的功率,从而使实际温度逐渐接近期望温度。
四、模糊 PID 控制的优势和局限性模糊 PID 控制相较于传统 PID 控制具有以下优势:1.适应性强:模糊 PID 控制能够适应不同类型的控制系统,尤其适用于非线性、时变性、不确定性的系统。
2.鲁棒性好:模糊 PID 控制具有较强的抗干扰能力,能够有效地抑制外部干扰对控制系统的影响。
3.自适应性:模糊 PID 控制可以根据系统的变化自动调整控制参数,无需人工干预。
然而,模糊 PID 控制也存在一定的局限性:1.模型依赖性强:模糊 PID 控制需要建立相应的数学模型,对于一些复杂的系统,建立准确的模型较为困难。
2.规则设计复杂:模糊 PID 控制需要设计合适的模糊规则,这需要对系统的动态特性有深入的了解,设计过程较为复杂。


优化脱苯塔操作提高脱苯效率张辉(河北旭阳焦化有限公司,河北保定073000)应用科技隋要]通过调整富油入塔温度、过热蒸汽温度、直接蒸汽量、洗油质量等措施.提高脱苯效率,江提高粗苹收率,为公司创造效益。
目≥键词】脱笨塔;富油;过热蒸汽;洗油由于化产二车间粗苯脱苯塔与老厂类型不同,为了摸索出适合本车间次种脱苯塔的操作方法,能使脱苯塔达到最高的效率,提高粗苯收率。
化产二车间粗苯工段自2008年12月投产以来,粗苯收率一直偏低,到2009年3、4月份粗苯收率还完不成指标,脱苯塔效率不能达’到设计的77%,脱苯效率不高,平均才达到70%,急需改变优化脱苯塔操作,提高脱苯效率,进而提高粗苯收率。
如何优化晚苯操作,从各个方面调整指标,使脱苯效率达到77%以上,才能完成公司制定082%的收率目标。
经过几次试验、分析、讨论中总结出影响脱苯效率的主要因素:1)富油入塔温度。
适当降低富油入塔温度,在保证脱苯效率的前提下,提高了浼由质量。
2)过热蒸汽温度。
提高过热蒸汽温度,能够减少蒸汽消耗,提高J I;{苯塔蒸馏效果。
3)直接蒸汽量。
提高直接蒸汽量,能够加快蒸馏速度,提高蒸馏效果,降低贫油含苯。
4)洗油质量。
洗油27a℃前馏出量I>75%,300℃前馏出量≥90%,能够充分洗涤煤气中的苯,同时也能够与苯很好的分离。
以下分布实施改善各影响因素1富油温度6月份富油温度控制在18a℃4--2℃过热蒸汽温度250—30a℃,直接蒸汽量2.5m3/h,经过一段时间的操作后,实验得出贫由含苯富油含苯脱苯效率6月8日Q3212474%6月11日0414472%6月15日Q321.1672%6月18日03213275%经过以上数据计算本月平均脱苯效率为73%,完不成当初定的77%的脱苯效率。
7月把富油入塔温度控制在177℃±2℃其它条件不变的情况下,经过实际操作化验分析得出贫由含苯富油含苯脱苯效率7月9日0361.6878%7月13日Q41B77%7月23日0281.682%7月30日0361.527觎由以上数据计算平均脱苯率78.2%。

第28卷 第1期2021年1月仪器仪表用户INSTRUMENTATIONVol.282021 No.1基于模糊神经网络PID的复合控制策略韦薇薇,何同祥(华北电力大学 控制与计算机工程学院,河北 保定 071003)摘 要:为了结合模糊控制容错力强和神经网络PID 在线学习和调整的优点,提出了一种结合模糊控制与神经网络PID 控制的复合控制方法,即分别设计模糊控制器和神经网络PID 控制器后,再利用权重分配器对这两个控制器进行权重分配来控制被控对象。
将该控制策略应用于某火电机组的二级过热器减温水流量系统控制,并在simulink 仿真平台进行仿真,仿真实验结果表明:该复合控制策略较传统的模糊控制或神经网络PID 控制的上升时间更短,调节时间和超调量更小,稳态性能更好。
关键词:复合控制;模糊控制;神经网络PID 控制中图分类号:TP13 文献标志码:ACompound Control Strategy Based on Fuzzy-Neural Network PIDWei Weiwei ,He Tongxiang(Department of Control and Computer Engineering, North China Electric Power University, Hebei, Baoding, 071003,China)Abstract:In order to combine the advantages of fuzzy control with strong fault tolerance and neural network PID online learningand adjustment, a compound control method combining fuzzy control and neural network PID control is proposed. That is, the fuzzy controller and neural network PID controller are designed separately, and the weights are reused. The distributor assigns weights to the two controllers to control the object. The control strategy is applied to the secondary superheater desuperheating water flow system control of a thermal power unit, and the simulation is carried out on the simulink simulation platform. The simulation ex-periment results show that compared with traditional fuzzy control or neural network PID control, this compound control strategy has shorter rise time, smaller adjustment time and overshoot, and better steady-state performance.Key words:compound control;fuzzy control;neural network PID controlDOI:10.3969/j.issn.1671-1041.2021.01.022文章编号:1671-1041(2021)1-0090-04收稿日期:2020-09-15作者简介:韦薇薇(1995-),女,广西崇左人,硕士研究生,研究方向:控制理论及其在过程控制中的应用。
模糊_神经_PID融合的控制策略的工程应用摘要:模糊控制和神经控制是智能控制的前沿领域,文章对模糊控制和神经控制的设计理论和应用进行了研究,针对基于数学模型的传统PID控制方法不能满足具有不确定性、难以精确建模的复杂控制系统设计的要求,采用了多种模糊—神经—PID融合的控制策略,并对工程实际进行了仿真实验,验证了所采用的控制方法的有效性。
本文的主要内容如下:1)总结了自动控制理论、模糊控制、神经控制的发展,研究状况和展望;指出传统PID控制方法存在的缺陷和不足;阐明了设计先进PID控制策略的必要性。
2)研究了模糊控制和自适应单神经元控制的原理和设计方法。
3)针对锅炉燃烧器这类存在大惯性环节,难以建立精确数学模型的控制对象,采用了模糊PID复合控制策略。
这种策略在大偏差范围内采用模糊控制,加快动态响应过程;在小偏差范围内转换为PID控制,消除稳态误差,实现精确控制。
通过MATLAB仿真实验表明,模糊PID复合控制能够满足系统要求,具有良好的快速性和稳态精度,具有很强的鲁棒性和抗干扰力,体现了优异的控制品质。
4)针对过热汽温调节系统这样一个存在非线性耦合、大滞后、多变量、干扰强的复杂被控对象,采用基于单神经元网络的智能PID控制。
该方法利用了神经元具有高度的容错性,鲁棒性,自组织,自学习和实时处理等特点对过热气温调节系统进行控制。
通过MATLAB仿真实验表明,基于单神经元网络的智能PID 控制方法具有算法简单、实时性好的特点,具有较强的自适应、自学习能力和较强的鲁棒性。
5)将模糊PID复合控制策略和基于单神经元网络的智能PID控制方法融合采用了模糊—神经—PID融合的控制策略,通过MATLAB仿真实验表明模糊—神经—PID融合的先进控制策略综合了模糊控制、神经控制和传统PID的优点,比前面两种控制策略具有更好的鲁棒性、快速性和控制精度。
表现出及其优异的控制品质。
关键词:模糊PID;智能PID;工业对象;不确定性前言自动控制理论形成以来,一直在科技的发展中扮演着举足轻重的角色。
由于它涉及的学科非常广泛,因此,自动控制理论的应用和影响也遍及了工农业生产和人类社会的各个领域。
回顾自动控制理论的发展历程,大体上可以划分为经典控制理论、现代控制理论和智能控制理论三个阶段。
通常,人们将经典控制理论和现代控制理论称为传统控制理论,而它们是基于对象线性化数学模型已知的控制方法,而智能控制不但可以应用于对象线性化数学模型已知的情况下,而且可以用于控制对象模型未知以及非线性时变的系统。
传统控制理论的一个重要应用领域是工业控制。
目前,工业控制大多采用常规PID控制,因为,PID控制可以满足大多数工业控制的需要。
并且具备控制效果较好、理论成熟、实现方便等优点。
尤其适用于可以精确建立数学模型的确定性系统。
然而随着工业化的迅速发展,受控对象和环境的日益复杂和多样化,在许多场合下,要想建立精确的数学模型变得十分困难或不可能,加之系统的复杂导致系统的非线性、时变程度增大,这使得基于对象线性化数学模型的传统控制理论无法满足控制系统对控制理论的要求。
由此,理论界致力于研究新的控制理论,从而使自动控制向智能控制方向发展。
智能控制由于具备不同于传统控制理论的本质特征:学习功能、自适应功能和组织功能,使其在解决复杂、非线性时变和不确定性受控的控制问题时,具有传统控制无法比拟的优势。
因此智能控制理论及其应用的研究成为自动控制发展的一个主要方向,作为两种主要的智能控制方法,模糊控制和神经网络控制,由于它们能模拟人的智能行为,并能够处理传统控制方法难以解决的控制问题,因此,模糊控制和神经网络控制成为智能控制的前沿和研究热点。
研究模糊控制是为了将人类的经验(知识)通过模糊逻辑语言变量及其之间的模糊关系进行模糊推理。
从而,使计算机控制进入那些基于对象精确数学模型无法控制的禁区,以便获得基于对象精确数学模型控制无法达到的控制效果。
研究神经网络控制是利用人工神经网络具有信息分布存储、自组织和自学习能力强大、可以利用并行处理技术提高效率以及它具有极强的非线性逼近能力等优点,对难以精确描述的复杂非线性对象建立数学模型。
还可以作为控制器来控制对象,以及用于优化计算,推理和故障诊断等多种用途。
从而达到对复杂非线性系统进行卓有成效的控制。
本文在PID控制的基础上,结合模糊控制、神经网络控制算法,先将模糊控制、神经网络控制与传统PID控制结合,最后将三种控制策略结合,采用模糊神经PID控制策略,并对实际工程应用进行了MATLAB实验仿真。
第一章综述了自动控制理论的发展历程,指出传统控制存在的缺陷和不足,阐述模糊控制、神经网络控制的基本思想。
第二章系统的介绍了模糊控制和神经网络控制的基本概况,神经网络的分类、算法以及应用研究现状。
第三章介绍了模糊控制和自适应神经网络控制的基本原理及设计。
第四章针对锅炉燃烧器一类存在大惯性环节,难以建立精确数学模型的被控对象,采用了模糊PID复合控制策略,并进行MATLAB仿真。
第五章把神经元的学习特性和常规PID控制算法结合起来,设计了基于单神经网络的智能PID控制,通过MATLAB仿真。
第六章综合了模糊控制、神经网络控制的优点,采用了将模糊控制、神经网络控制和常规PID控制策略融合的智能模糊神经PID控制策略,并通过MATLAB仿真。
1绪论1.1引言自动控制理论形成以来,一直在科学技术的发展中扮演着重要的角色。
由于它涉及的学科非常广泛,包括数学,计算机科学,信息论,控制论及工程科学等众多领域,因此自动控制理论的应用和影响也遍及工农业生产和人类社会的各个领域。
正是因为在实践中不断地发现问题,解决问题,从而涌现了大批新思想,新方法,推动自动控制理论的不断发展和不断完善。
回顾自动控制理论的发展历程,大体上可以划分为经典控制理论,现代控制理论和智能控制理论三个重要阶段[1]。
第一阶段:时间为20世纪40~60年代,称为“经典控制理论”时期。
经典控制理论主要是解决单输入但输出问题。
第二阶段:时间为20世纪60~70年代,称为“现代控制理论”时期。
状态空间法可以解决多输入多输出问题,系统既可以是线性的、定常的,也可以是非线性的、时变的。
第三阶段:时间是20世纪70年代木至今,称为“智能控制理论时期”。
智能控制的基本出发点是仿人的智能实现对复杂不确定性系统进行有效的控制。
它所涉及的领域,除了传统控制外还包括:计划、学习、搜索算法、复合系统、容错、纠错、重构、自主、Petri网、神经网络和模糊逻辑等。
1.2课题的提出和意义从引言中知道,自动控制理论研究正由成熟的传统控制理论阶段过渡到智能控制理论时期。
常规PID控制策略具有以下特性:1)原理简单。
2)适应性强。
3)鲁棒性强。
在PID控制中,PID参数的整定是一个关键问题,它直接影响控制效果。
确定PID参数的传统方法是:在获得对象数学模型的基础上,根据某一整定原则来确定。
当数学模型不可得到时,则利用经验并通过试验的方法确定PID参数。
控制器一旦设计好,其PID参数也就定了。
然而,实际工业生产过程往往具有非线性,时变不确定性,难以建立精确的数学模型,应用常规PID控制器不能达到理想的控制效果,而且在实际生产现场中,由于受到参数整定方法繁杂的困扰,常规PID控制器往往整定不良,性能欠佳,对运行工况的适应性很差。
这就要求PID参数能在线调整,以满足控制的要求。
因此在传统PID控制的基础上,结合模糊控制、神经网络以及其他智能算法(如人工遗传算法)的研究和应用将有非常广阔的前景。
本论文的设计理论就基于此。
1.3模糊控制和神经控制的基本思想模糊控制的基本思想是利用计算机来实现人的控制经验。
研究模糊控制的目的不是要把控制理论搞得模模糊糊,而是要通过引入模糊逻辑语言变量及其它们之间构成的模糊关系进行模糊推理,从而,使微机控制进入那些基于精确模型无法控制的禁区,以便获得基于精确模型控制所无法达到的精确的控制效果。
模糊控制器(Fuzzy Controller,FC)获得巨大成功的主要原因在于它具有如下一些突出特点:1)由工业过程的定性认识出发,比较容易建立语言控制规则,因而模糊控制对那些数学模型难以获取、动态特性不易掌握或变化非常显著的对象非常适用。
2)基于模型的控制算法及系统设计方法,由于出发点和性能指标的不同,容易导致较大差异:但一个系统的语言控制规则却具有相对的独立性,利用这些控制规律间的模糊连接,容易找到折衷的选择,使控制效果优于常规控制器。
3)模糊控制算法是基于启发性的知识及语言决策规则设计的,这有利于模拟人工控制的过程和方法,增强控制系统的适应能力,使之具有一定的智能水平。
模糊控制系统的鲁棒性强,干扰和参数变化对控制效果的影响被大大减弱,尤其适合于非线性、时变及纯滞后系统的控制。
而神经控制的基本思想则是利用计算机来实现人的自组织,自学习和自适应功能。
神经网络能够用于自控领域,主要有如下特征:1)并行处理功能:既能解决大批量实际计算和判决问题,又具有较强的容错能力。
2)由于隐层的存在,只需三层网络便可以任意精度逼近任意非连续函数。
在系统中,它至少能起三个基本作用:无当非线性控制对象模型;充当各种不同功能的控制器构造;构造优化计算或矩阵代数计算部件。
3)对不同的输入模式,隐层各单元激活强度不同。
对于干扰原因产生给定值偏离或系统内部结构变化,当经典方式和现代方式构成的负反馈调节无能为力时,神经控制却能因不同的激活强度获得满意的性能。
4)具有自学习能力。
由以上分析可知,模糊控制能够模拟人的思维和语言中对模糊信息的表达和处理方式,利用经验性知识,但是缺乏自学习能力:神经控制以神经元网络系统理论为基础,能够模拟人脑的结构和信息处理的记忆力功能,具有并行运算和无限逼近非线性函数的功能,但是缺乏推理能力和对先验知识的运用能力。
这两种方法各有所长并具有互补性,两种方法的融合对智能控制理论的研究有重大意义。
1.4本论文的主要工作本文的主要工作有以下几个方面:1)总结了传统控制、模糊控制、人工神经元网络、神经控制的发展和研究现状,并着重指出传统PID控制方法存在的缺陷和不足。
2)介绍了模糊控制和单神经元自适应控制的基本原理。
3)介绍了基于MATLAB的典型模糊控制器和自适应神经元控制器的设计方法和步骤。
4)针对锅炉燃烧器一类存在大惯性环节,难以建立准确数学模型的被控对象,采用了模糊PID复合控制策略。
通过MATLAB仿真实验表明,模糊PID复合控制能够满足系统要求,具有良好的快速性和稳态精度,具有很强的鲁棒性和抗干扰能力,体现了优异的控制品质。
5)针对过热汽温调节系统这样一个存在非线性耦合、大滞后、多变量、干扰强的复杂被控对象,采用基于单神经元网络的智能PID控制。
通过MATLAB仿真实验表明:基于单神经元网络的智能PID控制方法具有算法简单、实时性好的特点,具有较强的自适应、自学习能力和较强的鲁棒性。