- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(6) 将B0, B1, B2, B3, …光滑地连成曲线, 即是所 要求的凸轮轮廓曲线, 如图5 - 9(a)所示。 对于滚子从动件盘形凸轮轮廓曲线的设计 如图4 - 10所示。 为讨论方便, 仍采用上例的已知 条件, 只是在从动件端部加上一个半径为rT的滚 子。
-
B1
1
B0
B2
B3
r0
O
B1 1 B1 0
表 4 - 4 从动件正弦加速度运动规律
4.3盘形凸轮轮廓设计
4.3.1、 盘形凸轮轮廓设计的基本原理 为了便于绘出凸轮轮廓曲线, 应使工作中转动 着的凸轮与不动的图纸间保持相对静止。 根据相对运 动原理, 如果给整个凸轮机构加上一个与凸轮转动角 度ω数值相等、 方向相反的“-ω”角速度, 则凸轮处于 相对静止状态, 如图4-8
表 4 - 1 从动件等速运动规律 推程运动方程
运动线图
2. 等加速-等减速运动规律 从动件推程的前半段为等加速运动, 后半段为 等减速运动, 且加速度和减速度的绝对值相等, 前半段、 后半段的位移s大小也相等, 这种运动规律, 称为等加速 -等减速运动规律。 通常, 从动件在升程h中, 等加速段 的初速度和等减速段的末速度为0, 故两段升程所需的 时间必相等, 即凸轮转角均为δ0/2; 两段升程也必相 等, 即均为h/2。 其运动方程和运动线图如表4 - 2所示。
(2) 以理论轮廓曲线上的点为圆心, 以滚子半径为半径, 作系 列圆, 然后再作该系列圆的内包络线β, 如图4 - 10中的粗实线 所示, 它便是凸轮的实际轮廓曲线。 必须注意, 凸轮的基圆 半径r0是指理论轮廓曲线上的最小向径。
e - B8 B8 ′ B7 B′ 7 B′ 6 B6 B′ 5 K K8 K9 K6 7 K0 K5 K1 K4 K K2
图4 - 4(c)平底从动件
在实际机构中, 从动件不仅有不同的结 构形式, 而且有不同的运动形式。 如作往复 直线运动的从动件称为移动从动件, 如图4 5(a)、 所示; 作往复摆动的从动件称为摆动 从动件, 如图4 - 5(b)所示。
图4 - 5(b)
图4 - 5(a)
3. 按锁合形式分类 (1) 力锁合凸轮机构: 靠重力、 弹簧力或其 他外力使从动件与凸轮始终保持接触的凸轮机构。 如图4 - 1所示, 它是依靠弹簧力来维持高副接触的例 子。
0
B4
B9 B8 B5 B6 B7
图 4 - 10 对心滚子移动从动件盘形凸轮作图法
对于滚子从动件凸轮机构, 在工作时只有滚子中 心始终与从动件保持相同的运动规律, 而滚子与 凸轮轮廓接触点到滚子中心的距离, 始终等于滚 子半径rT。 由此可得作图步骤如下: (1) 将滚子的回转中心视为从动件的尖端, 按照上例步骤先绘出尖顶从动件的凸轮轮廓曲线 β0(即滚子中心轨迹), 如图4 - 10中的细实线所示, 该曲线称为理论轮廓曲线。
4
5
6 7 8 9 10
s
h
s ′
2
B6 (a)
B7
(b)
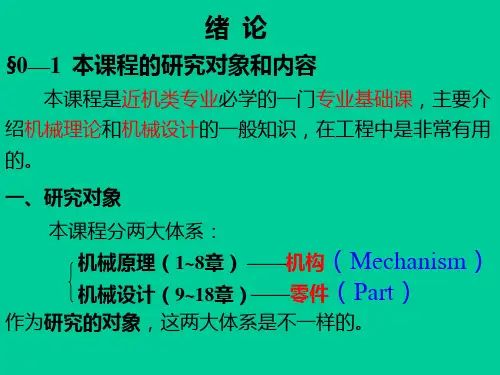
图 4 - 9 对心尖顶移动从动件盘形凸轮作图法
(3) 取任意点O为圆心, 以r0/μL为半径作基圆, 再以从动 件最低(起始)位置B0起沿-ω方向量取角度δ0, δs, δh, δ′s 等。 (4) 将δ0和δh按位移线图中的等份数分成相应的等份, 得B′1, B′2, B′3, …点。 (5) 在位移曲线中量取各个位移量, 并在基圆的系列径 向线上取B′1B1=11′, B′2B2=22′, B′ 3B3=33′, …, 得B1, B2, B3, … 点。 这些点就是反 转后从动件的系列位置。
22′, 33′, … 然后将圆上的等分点投影到相应的
垂线上得1′, 2′, 3′, … 用光滑曲线连接这些点, 即 得从动件的位移线图。
由运动线图中看出, 从动件按简谐运动规律运动 时, 其加速度曲线为余弦曲线, 故又称为余弦加速度运 动规律。 由加速度线图可知, 这种运动规律在运动的 始、 末两点处加速度有有限值的突变, 也会产生柔性 冲击。 因此, 该规律也只适用于中速场合。 只有加速 度曲线保持连续变化(如正弦加速度运动规律)时, 才能 避免冲击。 正弦加速度运动规律运动方程和运动线图 如表4 - 4所示。
r
1 tan
2
又因为 r=r0+s2, 所以
r0 r s2
1 tan
2
s2
由式
r0 r s2
1 tan
2
s2
可知,增大基圆半径可以减小压力角.工程上 为了获得紧凑的机构常选取尽可能小的基圆 半径,但必须要保证αmax≤[α].
(1) 选取长度比例尺μL, 根据已知从动件的运 动规律, 绘出位移曲线, 并将横坐标分段等 分, 如图4 - 9(b)所示。 (2) (2) 取任意点O为圆心, 以偏距e/μL和基圆 半径r0/μL分别为半径, 作偏距圆和基圆 (3) 在基圆上取点B0作为从动件升程的起始 点, 并过B0作偏距圆的切线, 该切线即是从 动件导路的起始位置。
Ft B
F
B2
B
s2
B1
Fn
r0
n
O
1
图4 - 13
r
式中, vB1为凸轮上B点的速度, vB1=rω1, 方向垂直于 OB; vB2为从动件上B点的移动速度, vB2=v2; 而从 动件B点相对速度vB2B1的方向与凸轮过B点的切线方 向重合。 根据合成速度三角形可得 v2=vB2=vB1 tanα= rω1 tanα
表 4 - 2 从动件等加速-等减速运动规律
推程运动方程
运动线图
表 4 - 3 从动件简谐运动规律
如表4 - 3中图所示, 简谐运动位移线图的作法如 下: 以从动件的升程h为直径画半圆,将此半圆和 相应凸轮运动转角δ0各分成相同等份(图中为6 等分), 得1″, 2″, 3″, …和1, 2, 3, … 作垂线11′,
图 4-8
而从动件则一方面随同机
架以“-ω”角速度绕O点转动, 另 一方面按原定规律在构架导路 中作往复移动, 即凸轮机构中各 构件仍保持原相对运动关系不 变。 如右图所示, 由于从动件的 尖端始终与凸轮轮廓相接触, 因 此在从动件反转过程中, 其尖端 的运动轨迹就是凸轮轮廓曲线。 此为凸轮轮廓设计的“反转法” 原理。
FQ n
B2B1
Ft B
F
B2
B
s2
B1
Fn
r0
n
O
1
图 4 - 12 凸轮机构的压力角
r
F1是推动从动件移动的有效分力,随着α的增大而 减小;F2是引起导路中摩擦阻力的有害分力,随着 的增大而增大。当 增大到一定值时,有引起的摩 擦阻力超过有效分力 ,此时凸轮无法推动从动件 运动,机构发生自锁。可见,从传力合理、提高传 动效率来看,压力角越小越好。在设计凸轮机构时, 应使最大压力角αmax≤[α]。 根据经验, 凸轮机 构的许用压力角[α]可取如下数值: 推程时, 移动从动件 [α]=30°~40°, 摆动从动件 [α]=45°~50°; 回程时, 通常取 [α]=70°~80°。
(4) 由B0点开始, 沿ω1相反方向将基圆分成与位 移线图相同的等份, 得等分点B′1, B′2, B′3, …。 过B′1, B′2, B′3, …各点作偏距圆的切线并延长, 则这些切线即为从动件在反转过程中依次占据 的位置。 (5) 在各切线上自B′1, B′2, B′3, …分别截取 B′1B1=11′, B′2B2=22′, B′3B3=33′, …, 得B1, B2, B3, …系列点。 将B0, B1, B2, B3, …连成光滑的 曲线, 即是所要求的凸轮轮廓曲线。
4.4 凸轮机构基本尺寸的确定
在设计凸轮机构时, 不仅要保证从动件能 实现预期的运动规律, 而且还要使机构具有良好 的传力性能和紧凑的结构尺寸。 这些要求与凸 轮机构的压力角、 基圆半径和滚子半径等尺寸 有关。
4.4.1 凸轮机构的压力角 凸轮机构的压力角, 指在不考虑摩擦力的情况 下, 凸轮对从动件作用力 的方向与从动件上力作用 点的速度方向之间所夹的 锐角,用α表示, 如图4 - 12 所示。 将从动件所受力F 沿接触点的法线n-n方向和 切线t-t方向分解为 Ft=Fcosα Fn=Fsinα
(2) 滚子从动件: 可视为在尖顶从动 件的尖顶处安装一个滚子, 即成为滚子从动件, 如图 4- 4(b)所示。
图4- 4(b)滚子从动件
(3) 平底从动件: 从动件与凸轮之间为线接 触, 当不计凸轮与从动件间的摩 擦时, 凸轮与从动件间的作用始 终垂直于从动件的平底, 因此传 动效率高, 接触面间容易形成油 膜, 润滑较好, 常用于高速凸轮机 构, 如图4 - 4(c)所示。
例1:画出图示机构的压力角
FQ
4.4.2、基圆半径的确定 设计凸轮机构时, 基圆半径选得越小, 机构 越紧凑。 但基圆半径的 减小会使压力角增大。 在图4 - 13所示的凸轮机 构中, B点为凸轮与从动件 的瞬时重合点, 根据相对 运动原理可得速度矢量关 系: vB2=vB1+vB2B1
n
B2B1
(2) 形锁合凸轮机构: 利用高副元素本身的几何形状使从动件与凸轮始 终保持接触的凸轮机构, 如图4 – 6(a)、 图4 – 6(b)图4 – 6(c)所示凸轮机构。
图4 – 6(a)沟槽凸轮
图4 – 6(b)等宽凸轮
图4 – 6(c)等径凸轮
4.2 常用的从动件运动规律 4.2.1、 凸轮机构的运动过程 及 运动参数 图4 - 7所示为一对心 直动尖顶从动件盘形凸轮机 构, 凸轮上有一最小向径, 以 最小向径r。为半径所作的圆 称凸轮基圆, r。称基圆半径, 凸轮以等角速度ω1顺时针转 动。 凸轮机构运动过程如下。
4.1.2、 凸轮机构的分类 1. 按凸轮形状分类 (1) 盘形凸轮: 它是一种有向径变化的绕固定轴转 动的盘形零件, 如图4 - 1中的件1是凸轮的最基本形式。 (2) 移动凸轮: 它可看作是回转半径无限大的盘形 凸轮, 凸轮相对机架作直线运动。 如图4 - 2中的件3。 (3) 圆柱凸轮: 它可看作是移动凸轮卷成圆柱体所 形成的凸轮, 从动件与凸轮之间的相对运动为空间运动, 如 图4 - 3中的构件1。