偏置曲柄滑块机构
- 格式:doc
- 大小:133.00 KB
- 文档页数:4

曲柄滑块机构工作原理一、引言曲柄滑块机构是机械传动中常用的一种机构,它能将旋转运动转化为直线运动,广泛应用于各种机械设备中。
本文将详细介绍曲柄滑块机构的工作原理。
二、曲柄滑块机构的组成曲柄滑块机构由曲轴、连杆和滑块三部分组成。
1. 曲轴曲轴是一根直径不等的圆柱体,它通常由多个偏心圆组成。
在工作时,曲轴通过旋转带动连杆和滑块实现运动转换。
2. 连杆连杆是连接曲轴和滑块的零件,它通常由两个铰接连接的杆组成。
在工作时,连杆能够保持与曲轴相切,并使得滑块产生直线运动。
3. 滑块滑块是一个可在直线上自由运动的零件,它通过连杆与曲轴相连。
在工作时,当曲轴旋转时,连杆推动滑块沿着固定方向做直线运动。
三、曲柄滑块机构的工作原理曲柄滑块机构的工作原理可以分为四个阶段:进气、压缩、爆发和排气。
1. 进气阶段在进气阶段,曲轴处于上死点位置,连杆与滑块的夹角为180度。
此时,空气通过进气门进入汽缸内。
2. 压缩阶段在压缩阶段,曲轴开始向下旋转,连杆与滑块的夹角逐渐减小。
此时,活塞开始向上运动,将空气压缩。
3. 爆发阶段在爆发阶段,当曲轴旋转到一定角度时,连杆与滑块的夹角达到最小值。
此时,点火器点燃混合气体,在高温高压下爆炸产生能量。
4. 排气阶段在排气阶段,曲轴继续向下旋转,连杆与滑块的夹角逐渐增大。
此时,活塞开始向下运动,并将燃烧后的废气排出汽缸外。
四、结论通过以上介绍可以看出,在曲柄滑块机构中,曲轴通过旋转带动连杆和滑块实现运动转换。
在工作过程中,曲轴的旋转运动被转化为滑块的直线运动,从而推动活塞完成吸气、压缩、爆发和排气四个阶段的工作。
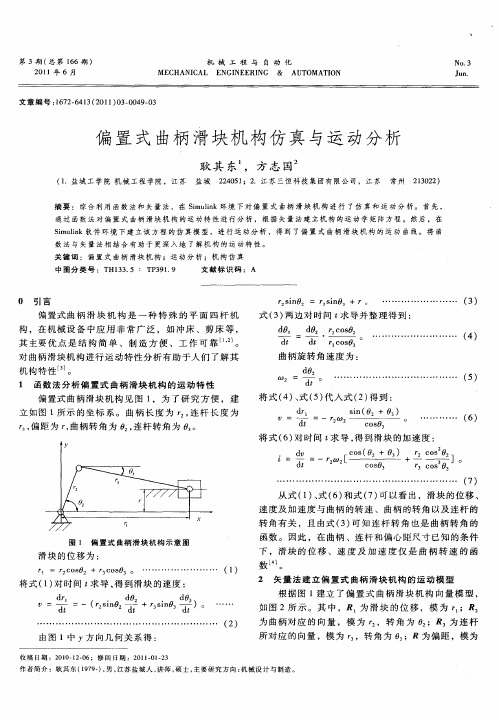
偏置曲柄滑块的运动方程式1. 引言偏置曲柄滑块机构是一种常见的机械传动装置,广泛应用于各个领域,如工业生产线、汽车发动机等。
它由一个旋转的偏置曲柄和一个在偏置曲柄上滑动的滑块组成。
通过改变偏置曲柄的旋转角度,可以控制滑块的运动轨迹和速度。
本文将介绍偏置曲柄滑块机构的基本原理和运动方程式,并通过数学推导和图示进行详细阐述。
2. 偏置曲柄滑块机构的基本原理偏置曲柄滑块机构由三个主要部分组成:偏置曲柄、连杆和滑块。
其中,偏置曲柄是一个固定在轴上并绕轴旋转的零件,连杆连接着偏置曲柄和滑块。
当偏置曲柄绕轴旋转时,连杆上的一端固定在偏置曲柄上,另一端连接着滑块。
由于连杆长度不变且固定在两个点上,所以当偏置曲柄旋转时,滑块被迫在一定的轨迹上运动。
3. 偏置曲柄滑块的运动方程式为了推导偏置曲柄滑块的运动方程式,我们需要定义一些参数和符号:•偏置曲柄长度:a•连杆长度:b•偏置曲柄旋转角度:θ•滑块位置:(x,y)根据几何关系,可以得到以下方程:x = a * cos(θ) + b * cos(φ) (1) y = a * sin(θ) + b * sin(φ) (2)其中,φ是连杆与x轴的夹角。
为了求解φ,我们可以利用三角形余弦定理:cos(φ) = (a^2 + b^2 - x^2 - y^2) / (2ab)将cos(φ)代入方程(1)和(2)中,即可得到偏置曲柄滑块的运动方程式。
4. 运动轨迹和速度分析根据运动方程式(1)和(2),我们可以分析偏置曲柄滑块机构的运动轨迹和速度。
4.1 运动轨迹通过改变偏置曲柄旋转角度θ,可以控制滑块的运动轨迹。
当θ=0时,滑块位于初始位置(a, 0)。
随着θ的增大,滑块将沿着一个椭圆轨迹运动,直到θ=π/2时达到最高点。
4.2 速度分析根据运动方程式(1)和(2),我们可以求解滑块的速度。
对x和y关于时间t求导数,即可得到滑块在x和y方向上的速度:v_x = -a * sin(θ) * θ’ - b * sin(φ) * φ’ (3) v_y = a * cos(θ) * θ’ + b * cos(φ) * φ’ (4)其中,θ’和φ’分别表示偏置曲柄旋转角度和连杆夹角随时间变化的导数。

具有最优传力性能的曲柄滑块机构的设计宁海霞1董萍摘要:在曲柄滑块机构的设计中,将x作为设计变量,求出已知滑块行程H,行程速比系数K 时机构传力性能最优的x 值,使得最小传动角γmin为最大,从而设计出此机构。
关键词:最优传力性能;曲柄滑块机构;行程速比系数;最小传动角机器种类很多,但它们都是由各种机构组成的,曲柄滑块机构就是常用机构之一。
它有一个重要特点是具有急回特性。
故按行程速比系数 K 设计具有最优传力性能的曲柄滑块机构是设计中常遇到的问题。
本文将 x 作为设计变量,给出了解决问题的方法。
一、x 和最小传动角γmin 的关系1.最小传动角γmin的计算曲柄滑块机构如图 1 所示,图中 AB 为曲柄,长度为 a,BC 为连杆,长度为 b,偏心距为 e。
γ愈大,对机构传动愈有利,它是机构传动性能的重要指标之一,工程上常以γ值来衡量机构的传力性能。
1作者简介:宁海霞(1设计、复合材料图 1当主动件为曲柄时,随着其位置不同,γ值亦不同,最小传动角γmin 出现在曲柄与滑块导路垂直的位置,其值为:min= cos-1(a +e) (1)b2.X 和最小传动角γmin 的关系设计一曲柄滑块机构,已知:滑块行程H,行程速比系数 K,待定设计参数为 a 、 b 和 e 。
K - 1计算极位夹角: = 180K -1K + 1根据已知条件,作出图2,曲柄支点在圆周上,它的位置决定传力性能,现设 AC1=x,x 作为设计变量,一旦确定了 A 点的位置,a、b 和 e 也就确定。
下面找出 a、b和 e与设计变量 x之间的关系。
图2 在△AC1C2中(2)H 2 = (b -a )2 +(b +a )2 -2(b -a )(b +a )cosb -a =xH 2 = x 2 + (x + 2a )2 - 2x (x + 2a ) cosx (cos-1) + H 2 - x 2 sin 2a = 2a +b x + 2 asin(AC C ) e / x 所以 e = sin(x 2 +2a 2)/ H(3)将 b = x +a 代入 (1)-1 e + a min = cos -1 ( e + a)(4) x +a将式(2)、( 3)代入式(4),γmin 仅为 x 的函数,则可求得γmin 的值。
基于Simmechanics的偏置曲柄滑块机构运动学建模及仿真研究偏置曲柄滑块机构是机械系统中常见的重要构件之一,其应用广泛且具有重要的工程实际意义,在许多对运动精度和效率要求较高的机械设备中均有应用。
本文将根据Simmechanics软件平台,对偏置曲柄滑块机构进行运动学建模及仿真研究。
1. 偏置曲柄滑块机构的结构与运动特点偏置曲柄滑块机构一般由曲柄、连杆、滑块等部件组成,其构造简单却效果卓越,能够使线性运动转化为旋转运动,并且具有体积小、质量轻、运动平稳等特点,被广泛应用于发动机、冲床、组合机床等机械设备中。
2. 基于Simmechanics的偏置曲柄滑块机构建模2.1 组件翻译与刚体连杆连接在Simmechanics中,我们首先需要将偏置曲柄滑块机构的各个组件按照真实的几何形态进行翻译,在建模时,偏置曲柄滑块机构的曲柄与连杆被定义为刚体,而机构中的滑块被定义为运动副。
2.2 连杆的轴向位置与杆长在建模时,我们需要输入连杆的轴向位置以及杆长数据,使得机构的运动精度更加准确。
2.3 滑块相对于曲柄的偏移量在Simmechanics建模中,我们可以通过设置连接杆的连接方式,将连接杆绑定到机构中心位置,在此基础上对机构中滑块的偏移量进行设置,以确保机构运动的准确性。
3. 偏置曲柄滑块机构运动仿真在完成基于Simmechanics的偏置曲柄滑块机构建模后,我们可以通过运动仿真,来进一步验证机构在真实运动中的性能表现。
3.1 曲柄旋转角度与滑块位移关系图在Simmechanics中,我们可以通过绑定虚拟仪表板,对偏置曲柄滑块机构的曲柄旋转角度与滑块位移进行实时监测,并将监测结果以关系图的形式呈现。
3.2 力矩曲线与功率图在Simmechanics中,我们可以添加作用于机构中各个部件的外部力,预测机构在不同工作条件下的承载能力,并生成相应的力矩曲线和功率图,以此来评估机构的工作性能。
4. 结论通过Simmechanics软件平台实现了偏置曲柄滑块机构的运动学建模及仿真,进一步验证了该型机构的运动计算和运动性能表现,为机械系统的设计和优化提供了较高的建模精度及仿真可靠性。
偏置曲柄滑块机构是一种常用的机械传动装置,其行程速比系数是衡量其性能的重要指标之一。
本文将从以下几个方面对偏置曲柄滑块机构的行程速比系数进行探讨。
一、偏置曲柄滑块机构的基本结构和工作原理偏置曲柄滑块机构由曲柄、连杆和滑块三部分组成,通过曲柄的旋转驱动连杆运动,进而带动滑块进行直线往复运动。
其工作原理如下:当曲柄旋转时,连杆由于铰接在曲柄和滑块上,会受到离心力的作用而产生往复运动,最终带动滑块进行直线往复运动。
二、行程速比系数的定义和计算方法行程速比系数是指偏置曲柄滑块机构在工作过程中,滑块在两个极值点(即最大位移点和最小位移点)的速度比值。
行程速比系数可用公式表示如下:\[S = \frac{v_{max}}{v_{min}}\]其中,S为行程速比系数,v_{max}为滑块在最大位移点的速度,v_{min}为滑块在最小位移点的速度。
通过测量这两个速度并代入公式中,即可得到偏置曲柄滑块机构的行程速比系数。
三、影响偏置曲柄滑块机构行程速比系数的因素1. 曲柄长度:曲柄长度的不同会影响到曲柄的旋转角度和速度,进而影响到连杆的往复运动速度,从而影响到滑块的速度,最终影响行程速比系数。
2. 连杆长度:连杆长度的变化会改变连杆的往复运动轨迹,进而影响到滑块的速度变化,从而影响行程速比系数。
3. 滑块质量和摩擦系数:滑块的质量和摩擦系数的变化会影响滑块的运动阻力,进而影响到滑块的速度,最终影响行程速比系数。
四、优化偏置曲柄滑块机构行程速比系数的方法1. 优化设计曲柄和连杆:通过合理设计曲柄和连杆的长度和结构,可以使偏置曲柄滑块机构在运动过程中速度更加均匀,从而优化行程速比系数。
2. 采用低摩擦材料和润滑方式:选择低摩擦系数的材料,并采用合适的润滑方式,可以降低滑块的摩擦阻力,从而优化行程速比系数。
3. 控制滑块质量和惯性:通过控制滑块的质量和惯性,可以减小滑块的惯性力,使其运动更加平稳,从而优化行程速比系数。
曲柄滑块机构工作原理介绍曲柄滑块机构是一种常见的机械传动装置,它通过曲柄和滑块的运动实现机械系统的工作。
本文将详细介绍曲柄滑块机构的工作原理、结构特点以及应用领域等内容。
一、工作原理曲柄滑块机构是一种将旋转运动转化为直线运动的机械装置。
它由曲柄和滑块两部分组成。
1. 曲柄曲柄是曲柄滑块机构的主要部分,它通常是一根长杆,其中一端固定于机构的主轴上,另一端通过铰链连接于活动的连杆。
曲柄的主要作用是将旋转运动转化为直线运动,使滑块能够沿特定轨迹运动。
2. 滑块滑块是曲柄滑块机构中的动力元件,通常是一个带有导向槽的平板。
滑块通过导向槽与曲柄相连,当曲柄旋转时,滑块在导向槽的作用下沿特定轨迹进行直线运动。
滑块上通常会安装其他部件,如传感器、工作头等,用于完成特定的功能。
3. 工作过程曲柄滑块机构的工作过程可以分为四个阶段:进给段、短暂停留段、回程段和短暂停留段。
具体过程如下:•进给段:当曲柄开始旋转时,滑块从起始位置开始匀速向前运动,直到滑块达到最大前进位置。
•短暂停留段:滑块到达最大前进位置后,曲柄继续旋转,滑块短暂停留在此位置,为后续工作做准备。
•回程段:当曲柄继续旋转时,滑块开始匀速向后运动,直到滑块回到起始位置。
•短暂停留段:滑块回到起始位置后,曲柄继续旋转一段时间,滑块再次短暂停留在此位置。
二、结构特点曲柄滑块机构具有以下结构特点:1. 简单可靠曲柄滑块机构的结构相对简单,组成部件较少,易于制造和维修。
同时,机构的工作过程清晰明了,稳定可靠,不易出现故障。
2. 运动平稳曲柄滑块机构的滑块运动轨迹为直线运动,具有恒定速度特点,因此运动平稳,震动小,能够满足精密传动的要求。
3. 功能多样曲柄滑块机构可以根据不同的需求,通过改变曲柄的长度、滑块的轨迹以及其他附加部件的设计,实现不同的功能。
例如,可以用于驱动活塞进行往复运动、实现直线切割或焊接等操作。
4. 应用广泛曲柄滑块机构在工业生产中具有广泛的应用。

偏置曲柄滑块机构存在的几何条件偏置曲柄滑块机构是一种常见的机械传动装置,广泛应用于各个领域,如发动机、压力机、工业机械等。
它的设计和运行需要满足一定的几何条件,以确保其正常工作和高效性能。
本文将介绍偏置曲柄滑块机构存在的几何条件。
首先,偏置曲柄滑块机构由曲柄、连杆和滑块组成。
其中,曲柄是一个旋转的轴,连杆将曲柄和滑块连接起来。
在机构设计中,几何条件必须满足以下几个方面。
1.连杆长度与曲柄半径的关系:连杆的长度决定了滑块的行程和速度。
根据几何关系,连杆长度应该等于曲柄半径加上滑块行程的一半。
这样设计可以确保在曲柄旋转一周时,滑块完成一个完整的往复运动。
2.曲柄和连杆之间的角度:曲柄和连杆之间的夹角也是重要的几何条件。
它会影响滑块的速度和力的传递。
通常情况下,曲柄和连杆之间的夹角应该小于90度,以确保连杆在滑动过程中保持正常的运动轨迹。
3.滑块轨迹的设计:滑块的轨迹形状也是几何条件中的重要考虑因素。
根据具体的工作要求,滑块的轨迹可以是直线、椭圆形或其他形状。
设计时需要根据应用场景和所需的运动特性选择合适的滑块轨迹形状。
4.曲柄和连杆的刚度和稳定性:在偏置曲柄滑块机构中,曲柄和连杆的刚度和稳定性也是关键的几何条件。
它们需要足够的强度和刚度,以承受工作载荷并保持稳定的运动。
合理的材料选择和结构设计可以确保机构的稳定性和耐久性。
5.摩擦和润滑:最后一个几何条件是摩擦和润滑的考虑。
滑块和连杆接触面之间的摩擦会影响机构的效率和磨损程度。
因此,适当的润滑和摩擦控制是必要的,以减少能量损失和零部件的磨损。
总之,偏置曲柄滑块机构存在一系列的几何条件,包括连杆长度与曲柄半径的关系、曲柄和连杆之间的角度、滑块轨迹的设计、曲柄和连杆的刚度和稳定性,以及摩擦和润滑等因素。
这些几何条件的合理设计和满足将确保偏置曲柄滑块机构的正常工作和高效性能,在各个领域发挥重要的作用。
希望本文能够对读者理解偏置曲柄滑块机构的几何条件提供一定的帮助,并在实际应用中起到指导作用。


偏置曲柄滑块机构课程设计一、课程目标知识目标:1. 学生能理解偏置曲柄滑块机构的基本原理与结构,掌握其运动规律及设计要点。
2. 学生能掌握偏置曲柄滑块机构的类型及其在不同应用场景中的优缺点。
3. 学生能运用数学和力学知识分析偏置曲柄滑块机构的运动和受力情况。
技能目标:1. 学生能运用CAD软件绘制偏置曲柄滑块机构的示意图,并进行简单的运动仿真。
2. 学生能根据给定的条件,设计简单的偏置曲柄滑块机构,并分析其运动性能。
3. 学生能通过实验和观察,验证偏置曲柄滑块机构的运动规律和设计原理。
情感态度价值观目标:1. 培养学生对机械设计的兴趣,激发创新意识,提高解决实际问题的能力。
2. 培养学生团队合作精神,学会倾听、交流、协作,提高沟通能力。
3. 培养学生严谨的科学态度,注重实践,养成良好的学习习惯。
本课程针对高年级学生,结合偏置曲柄滑块机构的知识深度,注重理论与实践相结合,旨在提高学生的机械设计能力、动手操作能力和创新能力。
课程目标明确,可衡量,便于教师进行教学设计和评估。
通过本课程的学习,学生将能够掌握偏置曲柄滑块机构的基本知识和技能,为今后的学习和工作打下坚实基础。
二、教学内容本章节教学内容主要包括以下几部分:1. 偏置曲柄滑块机构的基本原理与结构:- 曲柄滑块机构的定义及分类- 偏置曲柄滑块机构的结构特点与工作原理- 教材第二章第一节:曲柄滑块机构的基本概念2. 偏置曲柄滑块机构的运动分析:- 运动规律及运动方程- 偏置距对运动性能的影响- 教材第二章第二节:曲柄滑块机构的运动分析3. 偏置曲柄滑块机构的设计方法:- 设计步骤及要点- 参数选择与优化- 教材第二章第三节:曲柄滑块机构的设计方法4. 偏置曲柄滑块机构的CAD软件应用:- CAD软件的基本操作与绘图技巧- 运动仿真及分析- 教材第二章第四节:曲柄滑块机构的CAD软件应用5. 偏置曲柄滑块机构的实验与观察:- 实验设备与操作方法- 实验数据的收集与分析- 教材第二章第五节:曲柄滑块机构的实验研究教学内容按照以上安排,系统性地介绍了偏置曲柄滑块机构的基本知识、设计方法和实践应用。
偏置曲柄滑块机构与对心曲柄滑块机构的区别偏置曲柄滑块机构与对心曲柄滑块机构是机械设计中常见的两种机构,它们在工作原理、应用领域以及特点方面有很大的区别。
本文将对这两种机构进行全面评估,并从简到繁,由浅入深地探讨它们的差异,以便读者更深入地理解这两种机构的特点和应用。
1. 偏置曲柄滑块机构:偏置曲柄滑块机构是一种常见的转动-直线运动转换机构。
它由曲柄轴、曲柄、连杆和滑块组成。
其中,曲柄轴是固定的,曲柄则通过曲柄轴旋转,从而导致连杆和滑块产生直线运动。
- 工作原理:偏置曲柄滑块机构的工作原理非常简单。
当曲柄旋转时,连杆连接在曲柄和滑块之间,使得滑块随着曲柄的旋转而产生直线运动。
- 应用领域:由于偏置曲柄滑块机构结构简单、制造成本相对较低且运动传动效率较高,因此广泛应用于各种机械领域。
它常用于发动机中的活塞运动转换,或者用于工业生产中的压力和移动工作。
- 特点:相较于对心曲柄滑块机构,偏置曲柄滑块机构的特点如下:a) 运动传递方式不同:偏置曲柄滑块机构通过曲柄的旋转将转动运动转换为直线运动,而对心曲柄滑块机构则直接将转动运动转换为直线运动。
b) 运动轨迹不同:偏置曲柄滑块机构的滑块运动轨迹呈现椭圆形或近似椭圆形,而对心曲柄滑块机构的滑块运动轨迹为直线。
c) 可调性较强:由于偏置曲柄滑块机构的曲柄位置可以调整,因此可以通过改变曲柄的位置来调整滑块的运动速度和行程。
2. 对心曲柄滑块机构:对心曲柄滑块机构也是一种常见的转动-直线运动转换机构。
它由曲柄轴、曲柄、连杆和滑块组成。
与偏置曲柄滑块机构不同的是,对心曲柄滑块机构的曲柄轴与连杆的连接点处于同一轴线上。
- 工作原理:对心曲柄滑块机构的工作原理类似于偏置曲柄滑块机构。
当曲柄旋转时,连杆通过对心连接在曲柄上,并且滑块随着曲柄的旋转而实现直线运动。
- 应用领域:对心曲柄滑块机构由于其结构简单且运动平稳,常应用于精密机械、钟表、仪器仪表和自动化设备等领域。
- 特点:相较于偏置曲柄滑块机构,对心曲柄滑块机构的特点如下: a) 运动传递方式不同:对心曲柄滑块机构通过曲柄的旋转转换为连杆的直线运动,而偏置曲柄滑块机构则通过连杆的直线运动转换为滑块的直线运动。

偏置曲柄滑块机构与对心曲柄滑块机构的区别偏置曲柄滑块机构与对心曲柄滑块机构是机械工程中常见的两种运动转换机构,它们在工业生产和机械设计中都有着重要的应用。
两者之间的区别不仅仅在于结构形式上的差异,更在于其在实际应用中所具有的性能特点和适用范围。
在本文中,我们将深入探讨这两种曲柄滑块机构的区别,从结构原理、工作方式、性能特点等方面进行全面评估,以帮助读者更好地理解和应用这两种机构。
一、结构原理1. 偏置曲柄滑块机构偏置曲柄滑块机构由曲柄、连杆和滑块组成,其中曲柄的转动运动通过连杆传递给滑块,实现直线往复运动。
偏置曲柄滑块机构中的曲柄轴和滑块轨迹不在同一轴线上,因此称为偏置结构。
2. 对心曲柄滑块机构对心曲柄滑块机构同样由曲柄、连杆和滑块组成,不同之处在于曲柄轴和滑块轨迹在同一轴线上,因此称为对心结构。
这种结构在运动形式上与偏置曲柄滑块机构有所不同。
二、工作方式1. 偏置曲柄滑块机构偏置曲柄滑块机构在工作时,曲柄的旋转运动通过连杆传递给滑块,使得滑块做直线往复运动。
由于曲柄轴和滑块轨迹不在同一轴线上,滑块在往复运动过程中会受到一定的偏置影响,因此运动轨迹相对复杂。
2. 对心曲柄滑块机构对心曲柄滑块机构在工作时,曲柄轴和滑块轨迹在同一轴线上,因此滑块在往复运动过程中的轨迹相对简单,运动稳定。
三、性能特点1. 偏置曲柄滑块机构偏置曲柄滑块机构由于其曲柄轴和滑块轨迹不在同一轴线上,因此在运动过程中会受到一定的偏置影响,致使滑块运动不够稳定,因此适用于一些对运动要求不是特别高的场合。
2. 对心曲柄滑块机构对心曲柄滑块机构由于其滑块在往复运动过程中的轨迹相对简单,运动相对稳定,因此适用于对运动精度要求较高的场合。
个人观点和理解从以上对偏置曲柄滑块机构与对心曲柄滑块机构的比较可以看出,两者在结构原理、工作方式和性能特点上存在着明显的差异。
在实际工程设计中,我们需要根据具体的应用场合和要求,选择合适的曲柄滑块机构,以确保其性能和稳定性。

曲柄滑块机构及曲柄导杆机构的运动规律
曲柄滑块机构和曲柄导杆机构都是常见的机械传动机构之一,其运动规律如下:
1. 曲柄滑块机构的运动规律
曲柄滑块机构由曲柄、连杆和滑块组成。
当曲柄转动时,连杆带动滑块做直线往复运动。
曲柄的转动是匀速的,而滑块的速度则是变化的。
具体来说,滑块在前半周期内加速,后半周期内减速,且滑块的最大速度出现在过渡点处。
2. 曲柄导杆机构的运动规律
曲柄导杆机构由曲柄、连杆和导杆组成。
与曲柄滑块机构相比,曲柄导杆机构的特点是滑块被曲柄改为了导杆,使得滑块的运动方式发生了变化。
当曲柄转动时,导杆在导轨上做往复运动,同时连杆也产生了往复运动。
曲柄的转动是匀速的,导杆的速度也是变化的。
具体来说,导杆在前半周期内减速,后半周期内加速,且导杆的最大速度出现在过渡点处。
总之,曲柄滑块机构和曲柄导杆机构的运动规律都是由曲柄的匀速转动和连杆的往复运动所决定的。
不同的是,曲柄滑块机构中滑块的运动方式为直线往复运动,而曲柄导杆机构中导杆的运动方式为沿导轨做往复运动。
偏置曲柄滑块机构力矩偏置曲柄滑块机构是一种常见的机械传动装置,广泛应用于机械工程领域。
其中一个重要的参数是力矩,它是描述机构产生力量的能力的物理量。
本文将探讨偏置曲柄滑块机构力矩的相关内容。
力矩可以理解为力的杠杆效应,它是力的作用点到转轴的距离与力的大小的乘积。
在偏置曲柄滑块机构中,力矩是由曲柄臂和滑块力的组合产生的。
曲柄臂指的是从转轴到曲柄连接点的距离,而滑块力是滑块在运动过程中产生的力。
这两个因素共同决定了偏置曲柄滑块机构的力矩。
在机械设计中,力矩对于机构的稳定性和工作效率至关重要。
首先,力矩的大小与机构的工作能力直接相关。
较大的力矩能够提供更大的输出力量,使机构能够应对更大的负载。
其次,力矩还影响机构的运动速度和稳定性。
较大的力矩会导致机构的运动速度减慢,但也会增加机构的稳定性。
因此,在实际应用中,需要根据具体需求平衡力矩的大小和机构的速度稳定性。
在偏置曲柄滑块机构中,力矩的计算可以通过简单的几何原理来推导。
曲柄臂与滑块力之间的距离与曲柄的旋转角度之间存在着正弦关系。
因此,可以通过测量这两个参数来计算力矩的大小。
此外,还可以通过应用牛顿第二定律来计算力矩的大小,即力矩等于质量乘以加速度乘以距离。
除了力矩的大小,力矩的方向也是机构设计中需要考虑的因素之一。
力矩可以是顺时针或逆时针方向,这取决于滑块力和曲柄臂的方向。
根据具体应用的需要,设计师需要确定力矩的方向,以确保机构的运动和力量传递能够顺利进行。
总之,偏置曲柄滑块机构力矩是描述机构力量传递能力的重要参数。
力矩的大小和方向对于机构的工作能力、速度稳定性和力量传递效率都有重要影响。
在机械设计中,需要合理计算和选择力矩的大小和方向,以满足具体应用的需求。
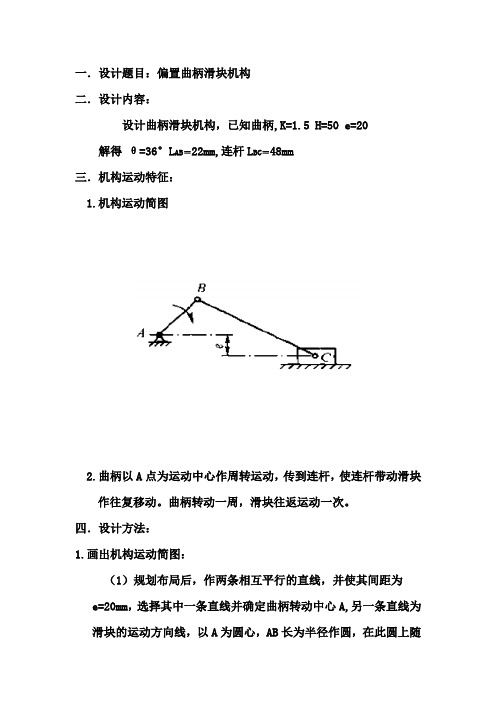
一.设计题目:偏置曲柄滑块机构
二.设计内容:
设计曲柄滑块机构,已知曲柄,K=1.5 H=50 e=20 解得θ=36°L AB=22mm,连杆L BC=48mm
三.机构运动特征:
1.机构运动简图
2.曲柄以A点为运动中心作周转运动,传到连杆,使连杆带动滑块
作往复移动。
曲柄转动一周,滑块往返运动一次。
四.设计方法:
1.画出机构运动简图:
(1)规划布局后,作两条相互平行的直线,并使其间距为e=20mm,选择其中一条直线并确定曲柄转动中心A,另一条直线为滑块的运动方向线,以A为圆心,AB长为半径作圆,在此圆上随
意确定一点B,以B点为圆心,BC长为半径作圆弧,与滑块的运动方向线相交,于C点,连接AB,BC。
最后确定机架,并标注原动件AB。
如上图所示。
2.选择适当的材料(硬质纸盒,硬质纸板,直径为3mm的塑料管);
3.根据机构运动简图设计制作各构件;
4.用胶水及塑料管连接各个构件;
5.检查构件连接,测试机构性能。
五.设计结果图:。
具有最优传力性能的曲柄滑块机构的设计
宁海霞1董萍
摘要:在曲柄滑块机构的设计中,将x作为设计变量,求出已知滑块行程H,行程速比系数K时机构传力性能最优的x值,使得最小传动角γmin为最大,从而设计出此机构。
关键词:最优传力性能;曲柄滑块机构;行程速比系数;最小传动角
机器种类很多,但它们都是由各种机构组成的,曲柄滑块机构就是常用机构之一。
它有一个重要特点是具有急回特性。
故按行程速比系数K设计具有最优传力性能的曲柄滑块机构是设计中常遇到的问题。
本文将x作为设计变量,给出了解决问题的方法。
图1
当主动件为曲柄时,随着其位置不同,γ值亦不同,最小传动角γmin 出现在曲柄与滑块导路垂直的位置,其值为:
)(cos 1min b
e
a +=-γ (1)
2.X 和最小传动角γmin 的关系
设计一曲柄滑块机构,已知:滑块行程H ,行程速比系数K ,待定设计参数为a 、b 和e 。
e 也就确定。
下
在△AC 1C 2中
θcos ))((2)()(222a b a b a b a b H +--++-= 因为 x a b =-
所以 θcos )2(2)2(222a x x a x x H +-++=
2
sin )1(cos 222θ
θx H x a -+-= (2)
又因为
x
e a
x C AC b a H /2)sin(sin 21+=∠+=θ 所以 H a x e /)2(sin 22+=θ (3) 将 a x b += 代入 (1)
)(cos 1min a
x a
e ++=-γ (4)
将式(2)、(3)代入式(4),γmin 仅为 x 的函数,则可求得γmin 的值。
二、设计最优传力性能的曲柄滑块机构 设计变量 x 的取值范围。
寻优区间起点在C 1处: x min =0 寻优区间终点在M 点: θ
tg H
x =
max 在 x 的取值范围内根据式(2)、(3)和(4)可求得x 一一对应的γmin 值。
利用一维寻优最优化技术黄金分割法,来求γmin 取极大值时的x 值。
将γmin 最大时的x 值代入(2)、(3)求出a 、e ,由b=x+a 求出b 值。
三、设计实例
试设计一曲柄滑块机构,已知滑块行程H=50mm ,行程速比系数K=1.5。
求传力性能最优的曲柄滑块机构。
x 的取值范围为0~68.819mm ,x=19.104mm 时,γmin 的最大值为 27.458°。
曲柄a=22.537mm 连杆 b=41.641mm
偏心距 e=14.413
四、结论
本文结合图解法和解析法把x作为设计变量,给出了根据行程速比系数K 时最优传力性能的曲柄滑块机构的最优设计方法。
参考文献:
[1]来瞒虔等.机械原理教学指南[M].北京:高等教育出版社,1998.
Design of the slider crank chain with Optimum
Driving Performance
NING Hai-xia DONG Ping
Abstract: In this paper, the design variable x was used in the design of slider crank chain with the datum of ram stroke (H) and stroke velocity ration coefficient (K). Slider crank chain comes to its optimum driving performance as the minimum driving angle (γmin) gets up to the maximum. The corresponding x was got,and the according slider crank chain was projected.
Key words: optimum driving performance; slider crank chain; stroke velocity ratio coefficient; minimum driving angle。