基于CANopen协议的工业机器人用轴伺服驱动系统的控制实现
- 格式:pdf
- 大小:1.68 MB
- 文档页数:5

CANopen协议在伺服电机控制系统中的实现2007-12-14 22:05基于现场总线的网络技术的研究是自动化领域发展的一个热点,CANopen协议是目前流行于欧洲的基于CAN总线应用层的标准协议,对工程设计者来说,研究现场总线的核心任务就是对控制节点进行开发,本文就是通过实现伺服电机控制模块的CANopen为协议,说明一个基于CANopen协议的控制网络的组态。
伺服电机控制器在自动控制领域里有着广泛的应用,如纺织机械和印刷机等,为了得到理想的速控效果,伺服电机模块除了要在分辨率、线性程度以及转换速率上达到一定的要求外,还应具有良好的在线可控性和实时在线状态检测功能,为此,利用CAN总线高层通信协议CANopen,结合陕西省教育厅“并条机自调匀整” 项目对伺服电机控制模块参数的要求,开发了一个具有硬件可重用性、软件可重配置特点的伺服电机控制模块。
1 CANopen协议概述[1-2]CANopen 协议是由CiA协会针对CAN协议的不完整性而定义出的一个更高层次的协议——应用层协议。
一个CANopen设备模块可分为3部分,如图1所示,通信接口和协议软件用于提供在总线上收发通信对象的服务,不同CANopen设备间的通信是通过交换通信对象来完成的。
这一部分直接面向CAN控制器进行操作,对象字典描述了设备使用的所有数据类型、通信对象和应用对象,对象字典位于通信程序和应用程序之间,用于向应用程序提供接口,应用程序对对象字典进行操作,即可实现CANopen通信。
它包括功能部分和通信部分,通信部分通过对对象字典进行操作实现CANopen通信,而功能部分则根据应用要求来实现。
在CANopen 网络系统中每个节点都有唯一的一个对象字典,而且每个节点的对象字典都具有相同的结构,但具体的内容要根据不同的设备而定,包含了描述该设备及其网络行为的所有参数,CANopen协议还定义了4种报文(通信对象),用于对不同作用的信息进行处理,分别为管理报文(NMT)、服务数据对象(SDO),过程数据对象(PDO)和预定义报文或特殊功能对象。


canopen伺服电机的回零控制方法Canopen伺服电机在工业自动化领域中应用广泛,其回零控制是实现精确位置定位的关键技术。
本文将详细介绍Canopen伺服电机的回零控制方法,帮助读者更好地理解和应用这一技术。
一、Canopen伺服电机简介Canopen伺服电机是基于Canopen通讯协议的伺服驱动电机,具有高性能、高精度和良好的实时性。
Canopen伺服电机广泛应用于机器人、数控机床、自动化生产线等领域。
二、回零控制的重要性回零控制是伺服电机定位控制的基础,其目的是使电机回到设定的零位,确保系统在每次启动或复位后都能从同一位置开始运行。
精确的回零控制对提高系统定位精度和稳定性具有重要意义。
三、Canopen伺服电机回零控制方法1.电机启动在开始回零控制之前,首先要确保电机已经启动并运行在正常状态。
2.发送回零命令通过Canopen通讯协议,向伺服驱动器发送回零命令。
通常,这个命令是一个特定的数据帧,包含回零模式、速度等参数。
3.回零模式选择Canopen伺服电机通常支持多种回零模式,如:(1)绝对位置回零:根据编码器记录的绝对位置信息,将电机移动到设定的零位。
(2)相对位置回零:通过设置一个相对距离,使电机从当前位置移动到零位。
(3)电子齿轮回零:利用电子齿轮功能,实现电机与负载的同步运动,从而达到回零目的。
4.设置回零速度根据实际需求,设置适当的回零速度。
过快的速度可能导致电机过冲,过慢的速度则会降低工作效率。
5.监控回零过程在回零过程中,实时监控电机的位置、速度等参数,以确保回零过程的顺利进行。
6.回零完成判定当电机到达设定的零位时,通过位置反馈信号判断回零是否完成。
此时,可以停止电机运行,并记录当前位置作为下次启动的零位。
四、注意事项1.在回零过程中,要确保通讯线路稳定,避免数据丢失或干扰。
2.根据实际应用场景,合理选择回零模式、速度等参数。
3.定期检查和校准编码器,确保位置信息的准确性。

伺服电机的CANopen协议例程一、什么是CANopen协议1.1 CAN总线介绍CAN(Controller Area Network)总线是一种串行通信协议,最初由德国Bosch公司开发,用于汽车电子系统之间的通信。
CAN总线具有高可靠性、实时性和抗干扰能力强的特点,因此在工业控制、航空航天、机器人等领域得到了广泛应用。
1.2 CANopen协议概述CANopen是基于CAN总线的一种高层通信协议,它定义了在CAN总线上进行设备之间通信的规范。
CANopen协议提供了一套标准的通信对象和服务,使得不同厂家的设备能够方便地进行通信和集成。
CANopen协议广泛应用于工业自动化领域,特别是伺服电机控制系统中。
二、伺服电机的CANopen协议应用2.1 伺服电机控制系统简介伺服电机是一种能够精确控制位置、速度和力矩的电机。
伺服电机控制系统通常由伺服电机、驱动器和控制器组成。
控制器通过发送控制指令给驱动器,驱动器再将指令转换为电机的运动控制信号,从而实现对电机的精确控制。
2.2 CANopen在伺服电机控制系统中的应用CANopen协议在伺服电机控制系统中扮演着重要的角色。
它定义了伺服电机控制系统中各个设备之间的通信方式和数据格式,使得不同厂家的伺服电机、驱动器和控制器能够进行互联互通。
通过CANopen协议,控制器可以向驱动器发送位置、速度、力矩等控制指令,驱动器则将实际的运动状态反馈给控制器,实现闭环控制。
三、CANopen协议的基本原理3.1 CANopen通信对象CANopen协议定义了一系列通信对象,用于描述设备之间的数据交换。
这些通信对象包括字典对象、PDO(Process Data Object)和SDO(Service Data Object)等。
字典对象用于存储设备的配置参数和状态信息,而PDO和SDO则用于实时数据的传输。
3.2 字典对象字典对象是CANopen协议中最基本的通信对象,它用于存储设备的配置参数和状态信息。

canopen控制伺服原理CANopen是一种用于控制伺服系统的通信协议,它基于CAN总线技术,具有高效、可靠的特点。
本文将介绍CANopen控制伺服的原理。
CANopen协议是一种开放的通信协议,它定义了伺服系统中各个设备之间的通信规则和数据格式。
通过CAN总线,伺服控制器可以与伺服驱动器、编码器等设备进行数据交换和控制指令传输。
在CANopen控制伺服系统中,伺服控制器作为主节点,负责发送控制指令和接收反馈数据。
伺服驱动器、编码器等设备作为从节点,负责接收控制指令并执行相应的动作,并将执行结果反馈给主节点。
CANopen协议中定义了一系列的对象字典,用于存储和传输数据。
主节点可以通过读取和写入对象字典中的数据来实现对从节点的控制。
例如,主节点可以向伺服驱动器的对象字典中写入目标位置数据,驱动器接收到数据后会根据指令进行相应的运动。
CANopen协议还定义了一套标准的通信对象,包括PDO(Process Data Object)和SDO(Service Data Object)。
PDO用于实时传输数据,例如位置、速度等实时反馈数据;SDO用于配置和管理设备,例如设置驱动器的参数、读取编码器的分辨率等。
在CANopen控制伺服系统中,主节点通过发送PDO来实现实时控制和数据传输。
主节点可以根据需要配置PDO的传输周期和数据内容,从节点接收到PDO后会根据指令进行相应的动作,并将执行结果通过PDO反馈给主节点。
除了PDO和SDO,CANopen协议还定义了一些其他的通信对象,例如NMT(Network Management)对象用于管理网络中的节点状态,EMCY(Emergency)对象用于传输紧急事件信息等。
总之,CANopen是一种高效、可靠的通信协议,适用于控制伺服系统。
通过CAN总线,主节点可以与从节点进行数据交换和控制指令传输,实现对伺服系统的精确控制。
CANopen协议的对象字典和通信对象提供了丰富的功能,可以满足不同应用场景的需求。
基于CANopen协议的伺服控制器应用* 高嵩 (南京电子技术研究所, 江苏南京210039 摘要:介绍一种支持CANopen协议的伺服控制器及其在雷达伺服系统中的应用。
通过对控制器EDS 文件的分析,描述单片机访问伺服控制器的对象字典,对控制器进行控制,获得控制器状态。
结果表明, 基于CANopen协议的控制器应用于雷达伺服系统中是成功的。
关键词:CANopen协议;雷达伺服系统;伺服控制器中图分类号:TN820. 3 文献标识码:B 文章编号:1008-5300(200906-0018-04 Application ofServoControllerBased on CANopen Protocol GAO Song (NanjingResearch Institute ofElectronicsTechnology, Nanjing210039, China Abstract:A servo controllerwhich supports CANopen protocol and its application in radar servo system is presented in thispaper. Through analyzing theEDS file of the servo controller, thispaperdescribesMCU con- trols and obtains status ofcontrollerby access to objectdictionary ofcontroller. The resultofanalysis indicates the application of controller supported CANopen protocol in radar servo system is successfu.l Key words:CANopen protoco;l radar servo system; servo controller 0 引言作为欧洲最流行的现场总线, CAN总线协议仅定义了CAN 的物理层和数据链路层(根据OSI模型,没有规定CAN的应用层。

基于EtherCAT工业现场总线的CANOpen通信协议伺服电机控制系统实现发表时间:2018-10-01T10:51:38.997Z 来源:《电力设备》2018年第16期作者:左根明孟勇[导读] 摘要:伺服电机是工业现场常见的运动单元,可以配合合适的回转部件和滚轴丝杠等实现执行机构的旋转或直线运动,在新能源电机回转部件的在线检测、振动试验台的运动控制等领域有着广泛的应用。
(安徽新视野科教文化股份有限公司安徽省铜陵市 244000)摘要:伺服电机是工业现场常见的运动单元,可以配合合适的回转部件和滚轴丝杠等实现执行机构的旋转或直线运动,在新能源电机回转部件的在线检测、振动试验台的运动控制等领域有着广泛的应用。
伺服电机有着多种控制模式,可实现对电机多种运动方式的精确控制。
本文介绍采用德国Beckhoff公司主导研发的EtherCAT工业现场总线技术,通过Beckhoff CX系列运动控制器,针对采用CANOpen通信协议的电机,实现CoE(CANOpen Over EtherCAT)通信下针对台达伺服电机的混合运动控制系统的实现流程及方法。
1.引言伺服电机是工业领域内常用的运控单元和动力输出单元,通过配合相应的运动机构可以实现特定的运动方式。
伺服电机具有电时间常数小、线性度高等特点,可以在环、速度还和电流环通过伺服电机驱动器实现精确控制,因此,在新能源汽车动力总成制造、传动部件在线检测等领域应用广泛,用以实现高精度位置、转速、扭矩控制。
伺服电机是一个典型的伺服系统,通常由电机本体、编码器和控制器组成。
电机本体通常分为有刷永磁电机、电子换向无刷电机、交流电机和交流无刷永磁电机集中。
其中有刷永磁电机机构最为简单,电子换向无刷电机通常用于小型工控环境,针对大型工控环境,通常采用交流电机,在性能要求苛刻的环境中则需要采用交流无刷永磁电机。
编码器是实现伺服电机精确控制的关键,电阻电位器是实现伺服电机编码器最简单的方式,而现在最常用的伺服电机编码器为旋转编码器,分为绝对值编码器和增量式编码器两种,前者可以记忆电机所处的位置,但造价高,后者结构更为简单造价低廉。
canopen伺服电机的回零控制方法Canopen伺服电机作为一种高性能的电机控制系统,广泛应用于工业自动化领域。
回零控制是伺服电机控制中的一个重要环节,对于确保设备精度和效率具有重要意义。
本文将详细介绍Canopen伺服电机的回零控制方法。
一、Canopen伺服电机简介Canopen伺服电机是基于Canopen协议的伺服驱动系统,具有通信协议统一、实时性高、稳定性好等特点。
它主要由伺服驱动器、伺服电机和编码器组成。
在工业自动化设备中,Canopen伺服电机能够实现精确的位置、速度和扭矩控制。
二、回零控制原理回零控制是指让伺服电机从当前位置移动到设定的零位(或参考位置)的过程。
这个过程通常包括以下几个步骤:1.检测当前位置:通过编码器或其他传感器获取电机的当前位置。
2.计算回零路径:根据当前位置和设定的零位,计算电机需要移动的距离和方向。
3.执行回零运动:控制电机按照计算出的路径移动到零位。
4.确认零位:到达零位后,通过传感器或其他方式确认零位是否准确。
5.精确调整:在确认零位的基础上,进行微调以确保电机位置精度。
三、Canopen伺服电机回零控制方法1.手动回零:通过操作面板或上位机手动设置零位,然后让电机移动到该位置。
优点:操作简单,易于实现。
缺点:对操作人员技术要求较高,可能存在误差。
2.自动回零:利用Canopen协议中的PDO(过程数据对象)和服务数据对象(SDO)实现自动回零。
步骤如下:a.发送回零命令:通过上位机或控制器向伺服驱动器发送回零命令。
b.伺服驱动器接收命令后,自动执行回零程序。
c.回零过程中,通过PDO实时监控电机状态,确保回零过程顺利进行。
d.到达零位后,通过SDO确认零位并上传给上位机或控制器。
优点:自动化程度高,减少人为干预,提高效率。
缺点:对编程和调试有一定要求。
3.外部传感器辅助回零:使用外部传感器(如光电开关、接近开关等)辅助实现回零。
步骤如下:a.在零位附近安装外部传感器。

基于CANopen协议的伺服驱动器从站实现孙旋;蒋文凯;廖文琦【摘要】针对伺服驱动器的多机应用要求实时性高、数据量大等特点,提出了基于CANopen总线协议的解决方案,采用了以F28M35H52C为主控制器的伺服驱动器硬件平台,着重分析并实现了CANopen协议中的协议结构、数据格式以及DS-301和DS-402子协议,使用台达CANopen主站设备与伺服驱动器建立CANopen网络实验环境。
实验结果表明CANopen协议在伺服驱动器中可成功实现伺服驱动器的多机控制。
【期刊名称】《制造业自动化》【年(卷),期】2016(038)005【总页数】5页(P9-13)【关键词】F28M35H52C;CANopen;现场总线;伺服驱动器【作者】孙旋;蒋文凯;廖文琦【作者单位】桂林理工大学机械与控制工程学院,桂林 541004;桂林理工大学机械与控制工程学院,桂林 541004;桂林理工大学土木与建筑工程学院,桂林541004【正文语种】中文【中图分类】TM3F28M35H52C是TI公司推出的Concerto系列的双核微处理器,主机子系统CPU采用ARM公司的Cortex-M3内核,最高主频可达100MHz,主机子系统负责稳健的通信,具有非常完整的外设,如以太网、CAN、I2C、USB、UART等,主机子系统实现了开发人员的生态环境,负责操作系统、中间件、软件(SW)基础结构[1]。
控制子系统采用的是TI的C28x微处理器,最高主频可达150MHz,主要完成对伺服电机的控制,两个子系统设计了共享的片上RAM以及IPC通信,相互之间可以快速交换数据,这比以往的单独的DSP或者DSP+FPGA 的架构性能更加优越。
CAN(Controller Area Network)称为控制器局域网,属于总线式通讯网络。
它是20世纪80年代初德国BOSCH公司提出为解决汽车内部众多控制器与测量设备之间的数据交换而开发的一种串行数据通信总线,是一种有效支持分布式控制系统或实时控制的串行通信网络[2],具有高可靠性、高性能等优点。
canopen控制伺服原理CANopen是一种通信协议,广泛应用于自动化控制领域。
它具有高性能、高可靠性和强大的实时性能等特点,被广泛用于控制伺服系统。
本文将介绍CANopen控制伺服原理,并深入探讨其工作原理和应用。
一、CANopen简介CANopen是一种基于CAN总线的通信协议,它定义了一组标准的对象、通信参数和服务,用于设备之间的数据交换和控制。
它支持多种不同类型的设备,包括伺服驱动器、传感器、控制器等。
CANopen的优势在于其高实时性和可靠性,能够满足复杂控制系统的需求。
二、CANopen在伺服控制中的应用在伺服系统中,CANopen被广泛应用于控制伺服驱动器的运动和位置。
通过CANopen,可以实现对伺服驱动器的参数设置、状态监测和故障诊断等功能。
下面我们将具体介绍CANopen在伺服控制中的应用原理。
1. 参数设置CANopen协议定义了一些用于设置伺服驱动器参数的对象,如PID参数、位置限制等。
通过CANopen主站发送相应的指令,可以实现对伺服驱动器参数的实时设置。
2. 位置控制通过CANopen,可以实现对伺服驱动器的位置控制。
主站发送相应的指令,驱动器接收到指令后,根据设定的位置模式和目标位置,控制伺服电机的运动,并实时反馈当前位置信息。
3. 速度控制CANopen还支持对伺服电机的速度控制。
主站发送速度指令,驱动器接收后,根据设置的速度模式和目标速度,调节伺服电机的运行速度,并实时反馈当前速度信息。
4. 状态监测通过CANopen,可以实时监测伺服驱动器的状态,包括电机转速、电流、温度等参数。
这些参数可以以对象的形式在CANopen网络中传输,方便用户进行实时的状态监测和诊断。
5. 故障诊断CANopen协议定义了一套标准的故障代码,用于诊断和报告故障信息。
当伺服驱动器发生故障时,通过CANopen网络,可以将故障代码传输给主站,方便用户进行及时的故障诊断和处理。
三、CANopen控制伺服原理解析CANopen控制伺服原理是基于CAN总线的分布式控制系统。

CANopen协议在伺服电机控制系统中的实现
宋晓梅;贾佳
【期刊名称】《单片机与嵌入式系统应用》
【年(卷),期】2006(000)006
【摘要】针对目前国内大多把精力放在硬件之上的底层软件开发,使应用水平难于提高的问题,结合工业控制中的伺服电机控制模块,开发基于PIC18F258微控制器的CAN总线高层通信协议CANopen,使模块具有较强的在线可控性、可扩展性和通用性.通过自行开发的基于Labview软件的PC监控面板实现模块的运行校验.【总页数】4页(P5-7,20)
【作者】宋晓梅;贾佳
【作者单位】西安工程科技学院;西安工程科技学院
【正文语种】中文
【中图分类】TP3
【相关文献】
1.基于CANopen协议的温室环境控制系统设计与实现 [J], 阳斌;秦琳琳;石春;吴刚
2.CANopen协议剖析及其在伺服电机控制中的实现 [J], 邓遵义;宁祎
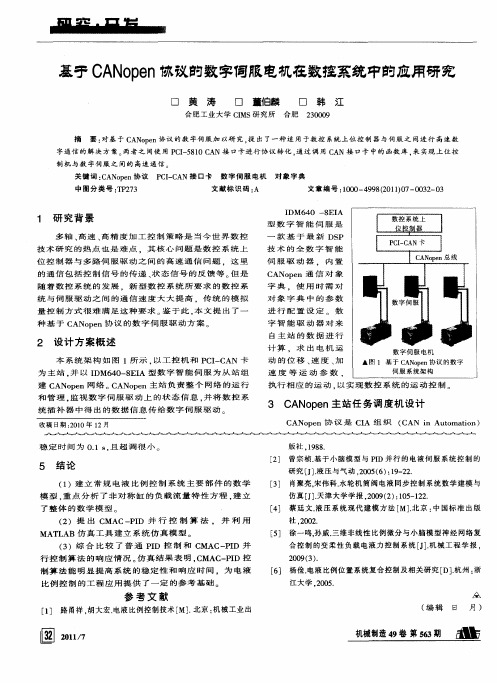
3.基于CANopen协议的数字伺服电机在数控系统中的应用研究 [J], 黄涛;董伯麟;韩江
4.基于CANopen协议的运动控制系统底层驱动软件实现 [J], 刘玉倩;侯为萍;高建
利
5.基于CANopen协议的轮式机器人控制系统实现 [J], 周旭;严玉龙;王珊珊;李军因版权原因,仅展示原文概要,查看原文内容请购买。

华中科技大学硕士学位论文CANopen协议在伺服系统中的软件实现与植入研究姓名:刘思捷申请学位级别:硕士专业:控制理论与控制工程指导教师:李叶松2011-02-23华 中 科 技 大 学 硕 士 学 位 论 文摘 要近年来随着微电子技术,计算机技术的发展,伺服系统在提高控制精度的同时,也在向网络化控制的方向发展。
分布式伺服系统作为常见的运动控制系统,在实际的工业生产线,数控机床系统以及机器人产品中都被广泛应用。
本文首先介绍了分布式交流伺服系统的发展概况,对交流伺服系统的网络化控制实现方法进行了分析。
然后以CAN总线应用层协议CANopen作为网络协议,采用软件植入的实现方案,研究了在实时控制系统软件框架中加入CANopen协议模块的方法。
针对软件植入方案的要求,对CANopen协议进行了深入的分析,分析了实现该方案需要解决的主要问题,根据实际的软硬件平台、控制软件的参数结构以及程序流程,设计了协议植入软件模块。
在原有硬件平台上,首先利用TMS320F2812型DSP的CAN总线模块,使用该部分的邮箱管理功能实现了CAN报文的分类处理,利用同步和异步收发的功能,完成了CANopen通信协议栈的植入;然后结合原有驱动器的参数结构,采用了高效的对象字典数据存储结构和索引算法,在避免参数二义性的前提下实现了CANopen对象字典;最后利用原有驱动器的控制程序,结合CANopen通信协议和对象字典,实现了CANopen运动控制子协议DS 402。
同时以PC机和PCI扩展卡为硬件平台,在Windows下编程实现了简易的CANopen主站功能,对从站的进行了实验。
实验结果证明了从站正确的实现了CANopen协议。
关键词:分布式伺服系统CANopen协议软件植入华 中 科 技 大 学 硕 士 学 位 论 文AbstractIn recent years, with the development of electronic and computer technology, servo system is improving its control accuracy, and developing to the direction of network control at the same time. Distributed servo system is a kind of common motion control system, which is widely used in assemble lines, numeric controlled machine tool, robots and so on.This thesis firstly introduces the overview of servo system development, and analyzes the realization of network-controlled distributed servo system. Then, CANopen protocol is adopted as network protocol, and software-implant way is taken to realize CANopen protocol onto an existing servo system. According to the program, the protocol is analyzed thoroughly, the main problems are figured out, and the module design is worked out based on the software and hardware platform. With the original platform, this thesis firstly uses eCAN module and CAN mailbox of TMS320F2812 DSP to realize CAN message sorting and handling. Both synchronous and asynchronous function are used to realize CANopen communication protocol; Secondly, with original system parameters, efficient data structure and algorithm are designed for dictionary, and standard CANopen Object Dictionary is built up under the premise of avoiding dictionary ambiguity; Finally, based on existing motion control module and CANopen Object Dictionary, CANopen DS 402 slaver protocol is realized onto the original servo. On the other hand, this thesis also realizes CANopen master protocol on PC machine with PCI-CAN card, which is programmed in Visual C++. At the end, this thesis takes an experiment, the result of which confirms the correctness of the CANopen device.Key words: Distributed servo system, CANopen protocol, software implant独创性声明本人声明所呈交的学位论文是我个人在导师指导下进行的研究工作及取得的研究成果。

针对伺服电机远程控制,基于CANopen的伺服控制形式的实现针对伺服电机远程控制,基于CANopen的伺服控制形式的实现网络导语:针对伺服电机远程控制接线复杂、控制单一、可靠性不高等问题,提出利用CANopen通信协议、驱动子协议实现伺服电机控制的新方法。
1、引言针对伺服电机远程控制接线复杂、控制单一、可靠性不高等问题,提出利用CANopen通信协议、驱动子协议实现伺服电机控制的新方法。
分析CANopen协议的对象字典和报文格式,详细介绍了CANopen伺服控制状态机各步骤的转换和实现CANopen协议下PP、PV、HM3钟伺服控制形式的报文设置。
利用CAN卡和伺服驱动设备和伺服驱动设备和PC机构建了实验平台,在上位机界面通过报文设置成功实现了基于CANopen协议的伺服电机的PP、PV、HM的三种形式的控制。
实脸结果说明利用协议的报文设置控制电机简单易操作,通讯数据快速、可靠,用户通过上位机可以很好的实现对伺服电机的监控。
2、系统总体架构整个控制系统由PC机、CANopen上位机、USBCAN适配器、伺服驱动设备构成。
CANopen通讯局部由DS301协议实现,伺服控制局部由DSP402协议实现伺服驱动设备作为的从节点,具有CANopen通讯功能,负责电机的电流、转速、位置等控制对象,它通过通信接口与总线相连,将信息传送给计算机的上位机界面;上位机界面那么根据从站的反应信息通过USBCAN适配器对伺服驱动设备实现控制。
伺服控制的系统总体架构,如下图3、CANopen伺服控制原理1〕CANopen通讯设备模型CANopen的设备模型分为以下3个局部:通信单元、对象字典、应用经过。
用户可以通过该模型对功能完全不同的设备进展描绘。
CANopen的核心概念是对象字典,对象字典包含描绘这个设备和它的网络行为的所有参数,应用单元和通信单元都可以问这个参数列表。
对象字典中的参数通过一个16位索引和位子索引进展识别和定位。
基于CANopen协议的数字伺服控制夏勇;叶晓东;赵江海【摘要】结合实际运用对CAN总线应用层协议CANopen进行了介绍;对CANopen相关参数配置进行了分析;对CANopen主从站节点的功能与设置进行了研究.以数字伺服为从站,上位机和USBCAN卡为主站.通过调用USBCAN接口卡中的函数库,实现了上位机与数字伺服之间的通信,并在实际运用中实现了基于CANopen协议的数字伺服控制.结果表明CANopen很大地增强了CAN网络的可配置性,在运动控制上的可行性和较高的可靠性.【期刊名称】《电气自动化》【年(卷),期】2014(036)001【总页数】4页(P57-59,81)【关键词】CAN总线;CANopen协议;伺服控制;服务数据;对象过程;数据对象【作者】夏勇;叶晓东;赵江海【作者单位】南通大学电气工程学院,江苏南通226019;中国科学院合肥物质科学研究院先进制造技术研究所,江苏常州213164;中国科学院合肥物质科学研究院先进制造技术研究所,江苏常州213164【正文语种】中文【中图分类】TP273.50 引言CAN即控制器局域网,是一种多主总线,被公认为最有前途的现场总线之一[1]。
CAN协议一个最大特点是废除了传统的站地址编码,取而代之的是对通信数据块进行编码[2]。
CANopen是CAN网络的一种应用层协议,是开放的、标准化的高层协议,是目前应用最广泛的嵌入式网络。
CANopen建立在CAN的数据链路层之上,除了对应层规范(DS 301)进行定义外,CANopen还专门为不同的接口设备应用子协议定义了行规(DSP4),其中CiA 402是针对驱动装置和运动控制装置的设备规范。
本文正是针对CANopen在伺服上的运用展开的。
1 CANopen协议简析CANopen协议包括对象字典(Object Dictionary,OD)、通信模型和设备模型三大部分,设备对象字典是中心概念[3]253。
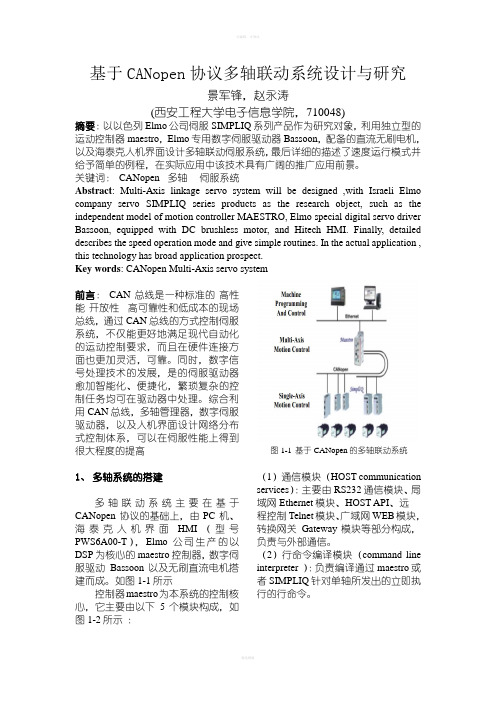
基于CANopen协议多轴联动系统设计与研究景军锋,赵永涛(西安工程大学电子信息学院,710048)摘要:以以色列Elmo公司伺服SIMPLIQ系列产品作为研究对象,利用独立型的运动控制器maestro,Elmo专用数字伺服驱动器Bassoon,配备的直流无刷电机,以及海泰克人机界面设计多轴联动伺服系统,最后详细的描述了速度运行模式并给予简单的例程,在实际应用中该技术具有广阔的推广应用前景。
关键词:CANopen 多轴伺服系统Abstract: Multi-Axis linkage servo system will be designed ,with Israeli Elmo company servo SIMPLIQ series products as the research object, such as the independent model of motion controller MAESTRO, Elmo special digital servo driver Bassoon, equipped with DC brushless motor, and Hitech HMI. Finally, detailed describes the speed operation mode and give simple routines. In the actual application , this technology has broad application prospect.Key words: CANopen Multi-Axis servo system前言:CAN总线是一种标准的高性能开放性高可靠性和低成本的现场总线,通过CAN总线的方式控制伺服系统,不仅能更好地满足现代自动化的运动控制要求,而且在硬件连接方面也更加灵活,可靠。
同时,数字信号处理技术的发展,是的伺服驱动器愈加智能化、便捷化,繁琐复杂的控制任务均可在驱动器中处理。
学校代码10530 学 号200911011491 分 类 号TM273 密 级硕士学位论文协议的主从站伺服 基于CANopen协议的主从站伺服控制研究控制研究学位申请人 陈 海 燕指 导导 教教 师师易灵芝 教授学 院院 名名 称称信息工程学院学 科科 专专 业业电力电子与电力传动研 究究 方方 向向电力电子装置与系统学位申请级别 工学硕士二〇一二年五月二十五日Research of Master-slave Station Communication Based on CANopenProfileCandidate ChenHai-yanSupervisor Prof. Yi Ling-zhiCollege College of Information EngineeringProgram Power Electronics and Power DriveSpecialization Power Electronic Equipment and SystemDegree Master of EngineeringUniversity Xiangtan UniversityDate2012.05.25湘潭大学学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权湘潭大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。