带有输入饱和的挠性航天器姿态跟踪鲁棒控制研究 精品
- 格式:pdf
- 大小:5.94 MB
- 文档页数:93
鲁棒控制理论在飞行器控制系统中的应用研究鲁棒控制理论是一种强大的控制理论,它可以帮助我们设计出对于不确定性和不稳定性有很高鲁棒性的控制系统。
这对于飞行器控制系统来说是至关重要的,因为它们必须在高度不稳定的环境中保持飞行安全。
在本文中,我们将探讨鲁棒控制理论在飞行器控制系统中的应用研究,并讨论其优缺点以及未来的发展趋势。
1. 鲁棒控制理论简介鲁棒控制理论是一种可以处理控制系统中的不确定因素和变化因素的理论,该理论的目的是使系统能够稳定地控制目标系统,即使在存在不稳定性或不确定性因素的情况下也能保证控制系统的稳定性和性能。
在鲁棒控制理论中,主要思想是通过增强系统的稳定性和鲁棒性,来增强系统的性能。
为了达到这个目标,鲁棒控制理论着重关注两个方面,即控制器的设计和控制系统的建模。
在控制器的设计中,方法包括适应性控制、鲁棒控制和非线性控制等。
在控制系统的建模方面,方法包括基于物理模型或数据驱动的建模。
2. 飞行器控制系统的挑战在控制飞行器的复杂系统中,快速而稳定地响应和控制是至关重要的。
不幸的是,飞行器面临的环境因素包括空气湍流、大气扰动、姿态变化等,使得系统变得不稳定。
此外,这些因素还会使系统变得复杂而难以建模。
由此可见,飞行器控制系统面临着很多挑战。
为了克服这些挑战,鲁棒控制理论在飞行器控制系统中得到了广泛应用。
3. 鲁棒控制理论在飞行器控制系统中的应用在飞行器控制系统中,鲁棒控制理论被广泛应用于姿态控制和高度控制等方面。
例如,利用鲁棒控制理论,可以实现对于飞行器的姿态变化、质量分布变化和外部干扰的鲁棒控制,从而确保飞行器能够保持稳定飞行。
此外,鲁棒控制理论还可以用于飞行器的自适应控制。
该方法允许控制器在控制过程中进行实时调整,以适应系统对于环境和其他不确定因素的变化。
这样一来,系统能够不断地调整自己,以保证在不断变化的环境中保持稳定,并且同时确保系统的最佳性能。
4. 鲁棒控制理论的优缺点鲁棒控制理论在飞行器控制系统中有很多优点。

飞行器制导与控制中的鲁棒控制算法研究近年来,随着航空技术的不断发展,飞行器制导与控制算法研究显得越来越重要。
鲁棒控制算法作为其中的一个研究重点,受到了广泛关注。
一、飞行器制导与控制简介飞行器制导是指将航空器从起飞、巡航、设定航迹、到降落的全过程中,使它按照预定的轨迹或目标位置准确无误地飞行。
飞行器控制则是指在制导的基础上,通过控制器控制机体姿态、加速度、飞行高度等关键参数,为机体提供精准的飞行控制。
飞行器制导与控制在军事、民用、科研等多个领域都有着广泛的应用。
例如,飞机、导弹、卫星、火箭等都属于飞行器范畴,而飞行器制导与控制则是它们能够准确无误地到达目标的保证。
二、鲁棒控制算法简介鲁棒控制算法是指一种具有复杂鲁棒性质的控制算法,它能够处理非线性、不确定、时变的控制系统,并使之对外部噪声和干扰产生一定的容忍度。
鲁棒控制算法通过对系统稳定性、鲁棒性以及性能的分析,提高系统在不确定因素下的稳定性和精度。
三、鲁棒控制算法在飞行器制导与控制中的应用鲁棒控制算法在飞行器制导与控制中的应用主要有以下几个方面:1. 跟踪控制跟踪控制是指通过对飞行器的位置、速度、角度等参数的跟踪控制,使其按照预设的路径或目标轨迹精准地飞行。
使用鲁棒控制算法可以有效地处理非线性、时变和不确定的影响因素,并提高系统的鲁棒性。
2. 姿态控制姿态控制是指通过对飞行器的欧拉角、角速度等参数的控制,使其具有所需要的姿态,如平稳的飞行、倾斜的飞行等。
使用鲁棒控制算法可以提高飞行器的控制精度和鲁棒性,从而达到更加可靠的姿态控制目的。
3. 迎角控制迎角控制是指通过对飞行器的迎角参数进行控制,使其在不同的控制状态下,保持良好的气动性能和稳定性。
使用鲁棒控制算法可以有效地处理非线性、时变和不确定的影响因素,并提高飞行器在剧烈控制状态下的鲁棒性。
4. 转弯控制转弯控制是指通过对横向和纵向控制参量的控制,使飞行器以预定的半径和角度完成转弯动作。
使用鲁棒控制算法可以提高飞行器的鲁棒性和控制精度,从而实现更加顺畅和稳定的转弯动作。

航天器姿态稳定强化学习鲁棒最优控制方法在航天器设计中,姿态稳定是非常重要的一项技术要求。
姿态稳定控制是指维持航天器在空间中特定的位置和方向,使其能够完成预定的任务。
传统的控制方法往往需要提前确定参数,但面对复杂多变的外部环境和内部动态特性,传统控制方法很难适应各种情况。
因此,强化学习成为了一种备受关注的姿态稳定控制方法。
强化学习是一种基于试错的机器学习方法,通过不断试验和学习来优化控制策略。
强化学习最早应用于人工智能领域,在近年来得到了广泛应用。
它的特点是通过与环境的交互学习和改进策略,而无需事先对环境进行建模。
这使得强化学习在姿态稳定控制中具有很大的优势。
对于航天器姿态稳定的强化学习控制方法,鲁棒性是非常重要的考虑因素。
航天器在实际任务中,常常会面对各种不确定性和扰动,例如大气摩擦、燃料消耗等。
这些不确定性和扰动会严重影响航天器的姿态控制。
因此,设计一个鲁棒性强、能够适应各种不确定性和扰动的强化学习控制方法是非常关键的。
强化学习方法主要包括状态、动作、奖励和策略。
在航天器姿态稳定中,状态可以包括航天器的位置、速度、加速度、角度等信息。
动作则是指航天器进行的具体操作,比如推力大小和方向等。
奖励是指根据航天器的动作和状态,根据任务的完成程度给予的奖励信号。
策略则是指控制算法根据环境信息选择动作的概率分布。
强化学习控制方法的关键在于设计一个合适的奖励函数。
奖励函数需要能够体现航天器的控制目标,同时能够对不同操作进行评价和区分。
在航天器姿态稳定中,可以设置奖励函数为与目标位置和角度的差异相关的函数。
这样一来,航天器就会受到奖励的驱动,不断优化控制策略,逐渐接近最优解。
为了增加控制方法的鲁棒性,可以采用强化学习中的鲁棒最优控制方法。
鲁棒最优控制方法是指在适应不确定性和扰动的基础上,最小化系统的性能指标,同时保持控制系统的鲁棒稳定性。
这种方法通过在强化学习算法中引入鲁棒性的考虑,使得控制系统在不确定性和扰动的情况下仍能保持姿态的稳定性。

基于鲁棒控制的航天器控制技术研究随着科学技术的快速发展,人类进入了一个充满挑战和机遇的时代。
现代航空航天技术的发展,为人们带来了更广阔的视野和更深远的探索空间。
航天器控制技术,作为现代航空航天技术的重要组成部分,对于保障航天器的安全、稳定和准确执行任务有着至关重要的作用。
本文将就基于鲁棒控制的航天器控制技术进行分析和研究。
一、鲁棒控制技术的概念和特点首先,我们需要了解什么是鲁棒控制技术。
鲁棒控制技术是指,通过对系统的不确定性、外部干扰以及各种噪声的抑制和补偿,使得控制系统的性能在一定范围内保持稳定的一种技术。
鲁棒控制技术具有以下特点:1. 可适应各种不确定性现实中,系统存在各种不确定因素,如模型误差、参数变化、外部干扰等。
通过应用鲁棒控制技术,能够有效的抑制和补偿这些不确定因素,使得系统具有更好的稳定性。
2. 对系统要求低鲁棒控制是一种弱化假设的控制方法,不依赖于系统模型精度,对系统的性质和边界条件要求相对较低,具有较好的适应性和实用性。
3. 良好的控制性能相比于传统的控制方法,鲁棒控制技术在解决控制问题时,能够在更广泛的工作条件下保证较好的控制性能,具有更强的鲁棒性。
二、基于鲁棒控制的航天器控制技术鲁棒控制技术在航天器控制中应用非常广泛。
航天器在执行任务的过程中,受到许多不确定因素的影响,如空气动力学、温度变化、太阳辐射等。
这些因素的变化会影响到航天器的控制,因此需要采用鲁棒控制技术来确保航天器的控制能力。
基于鲁棒控制的航天器控制技术,能够通过设计一个合适的控制器结构,实现对控制系统的较好稳定性和鲁棒性。
当航天器在执行飞行任务时,系统受到各种干扰和噪声的影响,采用鲁棒控制技术能够对这些不确定因素进行有效的抑制,从而保证航天器的控制能力,完成任务的要求。
三、鲁棒控制在航天器控制系统中的应用1. 航天器姿态控制航天器姿态控制是航天器控制系统中的一个关键环节,其主要任务是控制航天器的姿态,保证其稳定行驶。

一种航天器快速机动姿态跟踪自适应鲁棒控制方法
航天器的快速机动姿态跟踪自适应鲁棒控制方法是一种用于控制航天器在快速机动过程中精确跟踪期望姿态的控制策略。
下面我将为您介绍一种常见的方法。
该方法主要包括以下几个步骤:
1. 建立动力学模型:首先,需要建立航天器的动力学模型,包括质量、惯性、推进系统等方面的参数。
这个模型将被用于设计控制器。
2. 设计自适应鲁棒控制器:采用自适应控制方法可以克服航天器模型不确定性和外部扰动的影响。
基于动力学模型,设计自适应鲁棒控制器来追踪期望姿态。
这里的自适应控制器可以根据实际航天器的动态特性进行参数自调节,以提高控制性能。
3. 设计跟踪误差估计器:为了准确地跟踪姿态,需要设计一个跟踪误差的估计器来估计实际姿态与期望姿态之间的差异。
这个估计器可以基于航天器的传感器数据和控制器输出来计算。
4. 鲁棒性分析和优化:对于航天器在不同工况下的不确定性和外部扰动,进行鲁棒性分析并优化控制器参数。
通过鲁棒性分析,可以确保控制系统具有良好的稳定性和性能。
5. 仿真和实验验证:在完成控制器设计后,进行仿真和实验验证,评估控制系统的性能和鲁棒性。
根据仿真和实验结果,进一步优化控制器设计。
需要注意的是,航天器的快速机动姿态跟踪自适应鲁棒控制方法
是一个复杂的问题,需要综合考虑航天器的动力学特性、鲁棒性要求以及实际工程应用的限制等因素。
以上介绍的只是其中的一种常见方法,具体的控制策略可能会根据实际情况进行调整和改进。

挠性航天器刚柔耦合动力学建模与姿态控制技术的研究共3篇挠性航天器刚柔耦合动力学建模与姿态控制技术的研究1在航天探索中,挠性航天器的应用越来越广泛,得到了十分重视。
它具有重量轻、载荷能力强等优势,但相对应的却是挠性大,对姿态控制和稳定性要求极高。
挠性航天器的刚柔耦合动力学建模是研究其姿态控制技术的基础。
在建模中,需要考虑它的结构、弹性、惯性和控制等因素,综合分析其动力学性质。
大量的理论分析和实验研究表明,刚体模型无法贴切准确地描述挠性航天器的动态响应,所以需要建立刚柔耦合动力学模型。
模型的复杂性需要高精度数学方法的支持,而采用有限元法对其进行建模是目前较为常用的方法之一。
建模过程中,特别要注意模型精度和计算效率的平衡,以避免精度和时间的浪费。
在进行姿态控制的过程中,通常采用的是控制定律或控制策略。
其中,比较常见的是开环控制和闭环控制。
开环控制是直接将控制信号给予执行机构,缺点是无法实时地反馈和调整,容易失去控制;而闭环控制则在开环控制的基础上,引入了反馈调节,可以根据反馈信号进行实时控制,能够更好地控制姿态,但同时也增加了复杂度。
挠性航天器的姿态控制技术应用场景较为复杂,需要根据不同的任务需求,采用不同的控制策略。
例如,在对星载望远镜进行观测时,需要对挠性航天器的姿态做出高精度控制,可以采用自适应控制策略;在进行卫星捕获和交会对接时,需要将挠性航天器的姿态快速稳定,可以采用模型参考自适应控制策略等。
总的来说,挠性航天器刚柔耦合动力学建模和姿态控制技术的研究,对于保障航天器安全、提高航天器任务成功率具有重要作用。
在实际应用中,需要综合考虑针对不同任务情况选择合适的建模方法和控制策略,以实现航天器的精准运行和任务完成综上所述,挠性航天器刚柔耦合动力学建模与姿态控制技术是航天器领域研究的重要方向之一。
建模方法和控制策略的选择直接影响航天器的安全和任务成功率。
因此,需要持续深入研究,不断完善技术手段,以确保航天器的正常运行和各种任务的高质量完成挠性航天器刚柔耦合动力学建模与姿态控制技术的研究2随着科技的不断发展,人类对于探索宇宙的渴望也越来越强烈。


基于鲁棒控制的飞行器姿态控制研究随着现代科技的发展和社会的进步,飞行器技术已经成为了现代化社会发展的重要领域之一。
飞行器的姿态控制是飞行器控制领域中的重要组成部分,它关系飞行器的飞行性能。
鲁棒控制是近年来飞行器控制技术的一种新兴方法,本文将以基于鲁棒控制的飞行器姿态控制为主题,探讨其研究现状、应用前景等方面的问题。
一、鲁棒控制技术的基本原理鲁棒控制是指在特定的环境下,系统对未知干扰、故障等因素的变化具备很强的抵抗力和稳定性。
鲁棒控制技术的主要目标是通过控制系统,来应对所遇到的各种复杂干扰,保证系统的稳定和鲁棒性。
以飞行器姿态控制为例,鲁棒控制技术的核心是确定鲁棒区,即一种安全区域,它可以保证系统在鲁棒区内的运行是稳定的。
当系统受到外部干扰,导致其运行越出鲁棒区时,控制器会发挥作用,对飞行器进行姿态控制,使其重新进入鲁棒区。
通过鲁棒控制技术,可以使飞行器在复杂无序的大气环境中,保持良好的飞行稳定性和安全性能,提高其飞行控制的可靠性和鲁棒性。
二、基于鲁棒控制的飞行器姿态控制技术发展现状近年来,随着飞行器技术的不断发展,基于鲁棒控制的飞行器姿态控制技术也得到了广泛的应用和研究。
目前,基于鲁棒控制的飞行器姿态控制技术已经形成了成熟的理论体系和技术路线。
首先,鲁棒控制技术的理论基础已经被深入研究和探索。
以LMI为基础的鲁棒控制方法、线性控制方法、非线性控制方法以及模型参考自适应鲁棒控制等多种理论方法,在飞行器姿态控制方面已经得到了广泛的应用。
其次,基于鲁棒控制的飞行器姿态控制技术也被广泛应用于实际飞行系统中。
以微型无人机为例,基于鲁棒控制的姿态控制技术已经成功应用于其控制系统中。
该技术可以使无人机在复杂的环境中保持较好的稳定性和控制性能。
三、基于鲁棒控制的飞行器姿态控制技术的应用前景基于鲁棒控制的飞行器姿态控制技术具有广阔的应用前景,尤其在现代化社会追求高效、便捷、安全的趋势下,这种控制技术将成为飞行控制系统优化的一个重要手段。

航天器姿态控制技术的强鲁棒性设计与分析方法随着航天技术的不断发展和航天器任务的日益复杂化,航天器姿态控制技术扮演了越来越重要的角色。
航天器的姿态控制是指使航天器保持既定的姿态或完成特定任务所采取的一系列操作。
然而,在真实的环境中,航天器面临着各种扰动和不确定性因素,这对姿态控制系统的鲁棒性提出了严峻的挑战。
强鲁棒性设计是指在不确定性和扰动的情况下,能够保持系统性能和稳定性的设计方法。
对于航天器姿态控制技术来说,强鲁棒性设计是确保其在各种复杂环境中正常运行的关键。
本文将介绍航天器姿态控制的强鲁棒性设计与分析方法,探讨其在提高航天器姿态控制系统性能的重要性和应用前景。
首先,强鲁棒性设计需要考虑系统的建模和控制方法。
航天器姿态控制系统的建模可以使用多种方法,如质点模型、刚体动力学模型和柔性模型等。
在建模过程中,需要考虑航天器的动力学特性、环境扰动和外部干扰等因素,以获得准确的系统模型。
基于系统模型,可以选择合适的控制方法,如PID控制、模型预测控制和自适应控制等,以满足姿态控制的要求。
同时,强鲁棒性设计还需要考虑到模型不确定性和参数变化的影响,以确保控制系统的稳定性和性能。
其次,强鲁棒性设计需要采用鲁棒控制技术。
鲁棒控制是指在不确定性和扰动的情况下能够保持系统性能和稳定性的控制策略。
其中,H∞控制是一种常用的鲁棒控制方法,可以有效地抵抗模型不确定性和外部干扰。
H∞控制通过优化控制器的性能权重和鲁棒性性能约束,使得系统能够在面对各种扰动情况下保持稳定性和性能。
强鲁棒性设计还可以结合其他鲁棒控制方法,如μ合成和信息论方法等,在不同情况下提供更灵活和高效的控制策略。
此外,强鲁棒性设计需要考虑到航天器姿态控制系统的工程实践。
航天器姿态控制系统的实际应用中往往存在各种约束条件和限制,如动力学限制、传感器限制和执行器限制等。
强鲁棒性设计需要在满足这些约束的前提下,优化控制系统的性能和稳定性。
这需要充分考虑到航天器姿态控制系统的实际工作环境和应用需求,从而设计出合适的控制策略和方法。

2023-11-05CATALOGUE目录•绪论•航天器姿态动力学模型•基于强化学习的鲁棒最优控制算法•航天器姿态稳定强化学习鲁棒最优控制实验验证•结论与展望•参考文献01绪论研究背景与意义航天器姿态稳定的重要性航天器姿态稳定是维持其在空间轨道正常工作的关键,对于任务成功执行和科学实验数据的获取具有重要意义。
现有控制方法的局限传统的航天器姿态控制方法通常基于精确的模型和特定的环境条件,但在实际应用中,由于模型不确定性和外部干扰的存在,往往难以实现理想的控制效果。
强化学习与鲁棒最优控制的发展随着人工智能和优化控制理论的发展,强化学习算法和鲁棒最优控制理论为解决复杂控制系统问题提供了新的思路和方法。
010203国内在航天器姿态控制方面开展了大量研究,如基于PID 控制、H∞控制等传统控制方法,以及基于神经网络、模糊逻辑等智能控制方法。
国内研究现状国外在航天器姿态控制方面开展了广泛的研究,如美国NASA、欧洲ESA等机构在鲁棒控制、自适应控制等方面取得了重要进展。
国外研究现状随着人工智能和优化控制理论的不断发展,航天器姿态稳定控制正朝着智能化、鲁棒优化和自适应控制的方向发展。
研究发展趋势国内外研究现状及发展趋势研究内容、目的和方法研究内容本研究将针对航天器姿态稳定问题,结合强化学习算法和鲁棒最优控制理论,开展航天器姿态稳定强化学习鲁棒最优控制方法的研究。
研究目的旨在提高航天器姿态控制的鲁棒性和适应性,降低外部干扰对控制效果的影响,提高航天器的姿态稳定性和任务成功率。
研究方法将采用理论分析、仿真研究和实际验证相结合的方法,包括建立航天器姿态控制系统模型、设计强化学习算法、构建鲁棒最优控制器等。
02航天器姿态动力学模型航天器的姿态运动可以由角动量定理来描述,该定理表明角动量是姿态变化的驱动因素。
航天器姿态动力学方程角动量定理欧拉方程描述了航天器在三维空间中的运动状态,包括绕质心的旋转和进动。
欧拉方程根据角动量定理和欧拉方程,我们可以建立航天器姿态动力学模型,该模型描述了航天器的姿态运动和扰动对其影响。
航天器姿态系统的自适应鲁棒控制航天器姿态系统的自适应鲁棒控制摘要:航天器姿态控制是保持航天器在飞行过程中稳定的关键技术之一。
鲁棒控制方法能够在面对不确定因素和外界干扰时,保证系统的稳定性和性能。
本文将介绍航天器姿态系统的基本原理和现有的控制方法,并重点探讨自适应鲁棒控制在航天器姿态系统中的应用。
通过在系统中引入自适应机制,可以有效地应对参数变化和外部扰动,提高控制系统的性能和鲁棒性。
最后,我们将展望自适应鲁棒控制在航天器姿态系统中的未来发展趋势。
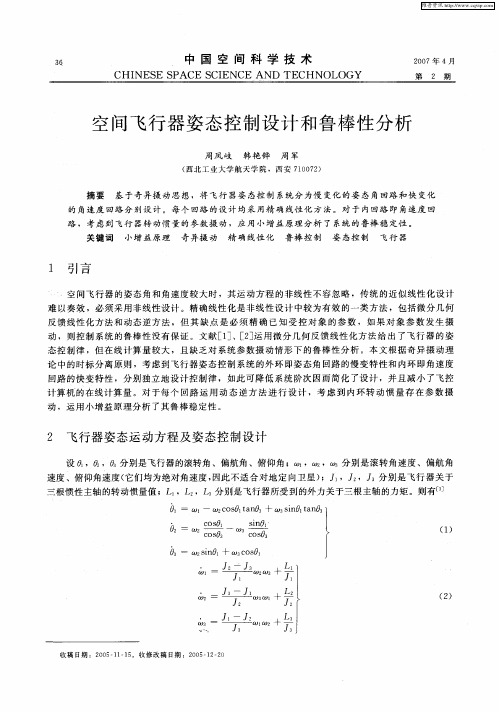
关键词:航天器姿态系统,自适应控制,鲁棒控制,参数变化,外部扰动一、引言航天器姿态控制是指通过改变航天器的角姿态,使航天器保持在期望轨道上飞行的一项关键技术。
在航天器的飞行过程中,存在着很多不确定因素和外界干扰,如参数变化、航天器结构的非线性等。
传统的控制方法难以应对这些问题,因此需要一种能够在面对不确定因素和外界干扰时保证航天器稳定性和性能的控制方法。
自适应鲁棒控制方法提供了一种解决方案。
二、航天器姿态系统的基本原理航天器姿态系统由陀螺仪、加速度计和姿态控制器等组成。
陀螺仪用于测量航天器的角速度,加速度计用于测量航天器的加速度。
姿态控制器根据测量到的角速度和加速度信息,通过控制航天器的推力和姿态调整装置,使航天器保持在期望的姿态上。
三、现有的控制方法目前,航天器姿态系统主要采用PID控制器和模型预测控制器等传统的控制方法。
PID控制器通过比较期望姿态和实际姿态的差异,计算出控制指令,从而调整航天器的姿态。
模型预测控制器则基于数学模型对航天器未来的姿态进行预测,然后根据预测结果进行控制。
这些控制方法在很多场景下表现良好,但是对于参数变化和外部扰动等问题的鲁棒性较差。
四、自适应鲁棒控制在航天器姿态系统中的应用为了提高航天器姿态系统的鲁棒性,可以引入自适应鲁棒控制方法。
自适应控制是一种能够根据系统的参数变化和外部扰动自动调整控制参数的方法。
通过在控制系统中引入自适应机制,可以实现对参数变化和外部扰动的实时监测和校正,从而保证了系统的稳定性和性能。

基于鲁棒控制的飞行器姿态稳定研究飞行器姿态稳定是飞行器控制中的一个非常重要的问题。
在飞行器飞行的过程中,受到各种外力的干扰,使得飞行器的状态不断变化,如果不能及时地对其进行控制,将会导致飞行器失控。
因此,研究如何对飞行器的姿态进行稳定控制,是飞行器控制中的一个核心问题。
在飞行器姿态稳定控制中,控制器的设计是非常关键的。
传统的PID控制器虽然简单易实现,但是在面对外界干扰等特殊情况下,很容易失效。
因此,一些新的控制方法被提出,例如基于鲁棒控制的控制器。
鲁棒控制指的是,在面对不确定的干扰和参数变化时,控制器能够保持一定的稳定性能。
因此,基于鲁棒控制的飞行器姿态稳定研究成为了一个热点问题。
在基于鲁棒控制的控制器中,通常会采用H∞控制或μ合成等方法。
H∞控制是一种优化方法,通过寻找一组H∞性能指标的最优值,使系统具有最好的鲁棒性能。
μ合成则是一种频域设计方法,通过对控制器的频率响应进行设计,使得系统在一定的频率范围内具有一定的稳定性能。
同时,如何将基于鲁棒控制的控制器应用于飞行器姿态稳定控制是一个非常重要的问题。
具体地,需要对飞行器的姿态动力学建立数学模型,然后基于鲁棒控制的方法进行控制器设计和实现。
其中,飞行器姿态动力学的数学模型是基础,也是挑战。
传统的飞行器姿态控制系统通常会采用欧拉角作为姿态描述,但是欧拉角具有奇点问题,因此一些新的姿态描述方式被提出,例如四元数和旋转向量。
在建立飞行器姿态动力学数学模型时,需要结合姿态描述方式进行选择和优化。
在实际的飞行器姿态稳定研究中,不同的飞行器和应用场景需要不同的控制方法和实现方式。
例如,旋翼飞行器和固定翼飞行器的控制方法存在很大差别,同时,对于一些特殊应用场景,如飞行器的高超声速飞行等,也需要特殊的控制器和优化方法。
因此,在研究基于鲁棒控制的飞行器姿态稳定问题时,需要充分考虑不同的应用场景和需求。
在总结上述内容的基础上,可以发现,基于鲁棒控制的飞行器姿态稳定研究是一个复杂而又重要的问题。


输入受限卫星姿态的鲁棒非线性镇定与跟踪控制
孙亮;霍伟
【期刊名称】《空间控制技术与应用》
【年(卷),期】2011(037)004
【摘要】研究控制输入受限的卫星在存在外部干扰和转动惯量不确定性时的姿态镇定和姿态跟踪控制问题,利用双曲正切函数的性质分别设计了两种有界鲁棒非线性反馈控制律,并用李雅普诺夫方法证明:通过适当选择两种控制律中的参数,可保证闭环系统角速度误差渐近趋于零,且姿态误差收敛到事先给定的原点小邻域内.仿真结果表明利用所设计的控制律可在控制输入受限情况下有效抑制外部干扰和转动惯量不确定性的影响,达到预期控制目标.
【总页数】7页(P24-30)
【作者】孙亮;霍伟
【作者单位】北京航空航天大学第七研究室,控制一体化技术国家级科技重点实验室,北京,100191;北京航空航天大学第七研究室,控制一体化技术国家级科技重点实验室,北京,100191
【正文语种】中文
【中图分类】V448.22
【相关文献】
1.具有输入饱和的数字液压缸非线性鲁棒位置跟踪控制 [J], 徐世杰;楼京俊;彭利坤
2.参数不确定非线性系统的鲁棒镇定与鲁棒跟踪设计 [J], 张凌波;吴敏
3.考虑执行器动态和输入受限的近空间飞行器鲁棒可重构跟踪控制 [J], 张强;吴庆宪;姜长生;王玉惠
4.输入力矩受限的机器人鲁棒自适应跟踪控制 [J], 黄春庆;王兴贵;王祖光
5.输入受限机器人的鲁棒自适应输出反馈跟踪控制 [J], 黄春庆;施颂椒
因版权原因,仅展示原文概要,查看原文内容请购买。
空间绕飞任务中航天器姿态跟踪的鲁棒控制宋申民;张保群;陈兴林【期刊名称】《系统工程与电子技术》【年(卷),期】2011(033)001【摘要】研究了空间绕飞任务中从航天器对主航天器进行观测时的姿态跟踪控制问题,提出了综合考虑挠性、外部扰动和参数不确定性等因素的输入饱和鲁棒控制器设计方法.根据主、从航天器的质心相对运动信息,解算出了从航天器的期望跟踪姿态.为保证从航天器跟踪期望姿态时控制器的有界性和强鲁棒性,将文献中已有的一种一阶滑模姿态调节控制器推广到了姿态跟踪的情况.进一步,为消除一阶滑模控制的高频抖振问题,将姿态跟踪问题转化成了标准的二阶滑模控制问题,提出了一种连续的二阶滑模姿态跟踪控制器.仿真结果表明,本文算法能有效实现绕飞过程中的姿态跟踪,同时具有强鲁棒性.%The problem of the attitude tracking control for space flyaround mission, when the slave spacecraft is desired to observe the main one. is investigated, and a method of robust controller design, associated with such factors as flexible vibration,external disturbances, and parametric uncertainties, subject to control input saturation, is presented. According to the relative motion information of the mass centers of both spacecraft, the desired attitude to be tracked by the slave is calculated. To guarantee the boundedness and strong robustness of the controller when the slave tracks the desired attitude, the extension of a firstorder sliding-mode controller for attitude regulation given in existing literatures to the case of attitude tracking isattempted.Further. to eliminate the high-frequency chattering brought by the first-order sliding-mode controller. the attitude tracking problem is transformed to that of standard second-order sliding-mode control, then a continuous and second-order sliding-mode control based attitude tracking controller is proposed. Simulation results show that the algorithm in the paper can achieve the goal of attitude tracking during the fly-around stage effectively,and has strong robustness.【总页数】7页(P120-126)【作者】宋申民;张保群;陈兴林【作者单位】哈尔滨工业大学控制理论与制导技术研究中心,黑龙江哈尔滨150001;哈尔滨工业大学控制理论与制导技术研究中心,黑龙江哈尔滨150001;哈尔滨工业大学控制理论与制导技术研究中心,黑龙江哈尔滨150001【正文语种】中文【中图分类】V488.2【相关文献】1.空间绕飞航天器间电磁兼容仿真分析方法 [J], 刘岩;郑伟;孙犇;梁克2.航天器快速绕飞任务的六自由度滑模控制研究 [J], 朱彦伟;杨乐平3.非合作目标绕飞任务的航天器鲁棒姿轨耦合控制 [J], 黄艺;贾英民4.地月空间航天器绕飞接近跟踪控制 [J], 王毓媛;白玉铸;许展鹏;赵勇;陈小前5.基于逆系统方法的航天器姿态跟踪最优鲁棒控制 [J], 袁长清;李俊峰;王天舒;宝音贺西因版权原因,仅展示原文概要,查看原文内容请购买。

大型挠性航天器的鲁棒模型预测姿态控制
管萍;吴希岩;戈新生;曹彧腾
【期刊名称】《宇航学报》
【年(卷),期】2022(43)4
【摘要】针对大型挠性航天器的三轴姿态控制问题,考虑了控制输入约束,设计了鲁棒模型预测姿态控制器。
首先,将模型预测控制应用到不考虑扰动的标称挠性航天器系统中,通过求解优化问题推导预测控制律,从而得到三轴姿态的标称轨迹。
然后,为有效处理大型挠性附件振动对中心刚体姿态造成的扰动,针对带有扰动的挠性航天器实际姿态控制系统,设计由最优状态与实际系统状态的误差构成的辅助反馈控制器,使实际系统状态维持在以标称轨迹为中心的“管道”(Tube)不变集内,并驱使实际系统状态到达标称轨迹上,最终沿着标称轨迹到达平衡点。
仿真结果表明,在鲁棒模型预测控制的作用下,实现了姿态角的快速精确跟踪,有效地处理了由大挠性附件振动对中心刚体姿态产生的扰动,增强了系统的鲁棒性。
【总页数】10页(P476-485)
【作者】管萍;吴希岩;戈新生;曹彧腾
【作者单位】北京信息科技大学自动化学院
【正文语种】中文
【中图分类】V448.22
【相关文献】
1.挠性航天器的鲁棒多目标姿态控制器设计
2.挠性飞行器姿态控制系统鲁棒稳定性分析的区间矩阵方法
3.带有大型挠性网状天线航天器的鲁棒H∞控制方法
4.挠性航天器多目标鲁棒姿态控制的DPSO算法实现
5.基于自触发的大挠性航天器模型预测姿态控制
因版权原因,仅展示原文概要,查看原文内容请购买。