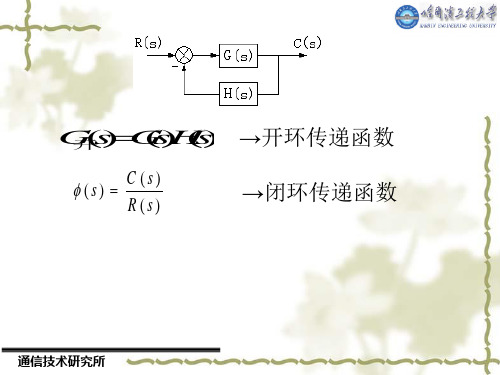
《自动控制理论教学课件》第三章习题
- 格式:ppt
- 大小:1.01 MB
- 文档页数:46

习题3-1.选择题:(1)已知单位负反馈闭环系统是稳定的,其开环传递函数为:)1(2)s )(2+++=s s s s G (,系统对单位斜坡的稳态误差是:a.0.5 b.1 3-2 已知系统脉冲响应t e t k 25.10125.0)(-=试求系统闭环传递函数)(s Φ。
解 Φ()()./(.)s L k t s ==+001251253-3 一阶系统结构图如图3-45所示。
要求系统闭环增益2=ΦK ,调节时间4.0≤s t s ,试确定参数21,K K 的值。
图3.38 题3-3图解 由结构图写出闭环系统传递函数111)(212211211+=+=+=ΦK K sK K K s K sK K s K s令闭环增益212==ΦK K , 得:5.02=K 令调节时间4.03321≤==K K T t s ,得:151≥K 。
3-4 设二阶控制系统的单位阶跃响应曲线如图 3.39 所示。
如果该系统为单位反馈控制系统,试确定其开环传递函数。
图3.39 题3-4图 解:由图2.8知,开环传递函数为3-5 设角速度指示随动统结构图如图3-40所示。
若要求系统单位阶跃响应无超调,且调节时间尽可能短,问开环增益K 应取何值,调节时间s t 是多少?图3-40 题3-5图解:依题意应取 1=ξ,这时可设闭环极点为02,11T -=λ。
写出系统闭环传递函数Ks s Ks 101010)(2++=Φ 闭环特征多项式20022021211010)(⎪⎪⎭⎫ ⎝⎛++=⎪⎪⎭⎫ ⎝⎛+=++=T s T s T s K s s s D 比较系数有 ⎪⎪⎩⎪⎪⎨⎧=⎪⎪⎭⎫ ⎝⎛=K T T 101102200 联立求解得 ⎩⎨⎧==5.22.00K T 因此有 159.075.40''<''==T t s3-6 图3.41所示为某控制系统结构图,是选择参数K 1和K 2,使系统的ωn =6,ξ=1.3-7 已知系统的特征方程,试判别系统的稳定性,并确定在右半s 平面根的个数及纯虚根。

3-1 设系统特征方程式:试按稳定要求确定T 的取值范围。
解:利用劳斯稳定判据来判断系统的稳定性,列出劳斯列表如下:欲使系统稳定,须有故当T>25时,系统是稳定的。
3-2 已知单位负反馈控制系统的开环传递函数如下,试分别求出当输入信号为,21(),t t t 和 时,系统的稳态误差(),()().ssp ssv ssa e e e ∞∞∞和解:(1)根据系统的开环传递函数可知系统的特征方程为:由赫尔维茨判据可知,n=2且各项系数为正,因此系统是稳定的。
由G(s)可知,系统是0型系统,且K=10,故系统在21(),t t t 和输入信号作用下的稳态误差分别为:(2)根据系统的开环传递函数可知系统的特征方程为:由赫尔维茨判据可知,n=2且各项系数为正,且2212032143450,/16.8a a a a a a a ∆=-=>∆>=以及,因此系统是稳定的。
由G(s)可知,系统式I 型系统,且K=7/8,故系统在21(),t t t 和 信号作用下的稳态误差分别为:(3)根据系统的开环传递函数可知系统的特征方程为:由赫尔维茨判据可知,n=2且各项系数为正,且21203 3.20a a a a ∆=-=>因此系统是稳定的。
由G(s)可知,系统是Ⅱ型系统,且K=8,故系统在21(),t t t 和 信号作用下的稳态误差分别为:3-3 设单位反馈系统的开环传递函数为试求当输入信号2()12r t t t =++时,系统的稳态误差.解:由于系统为单位负反馈系统,根据开环传递函数可以求得闭环系统的特征方程为:由赫尔维茨判据可知,n=2且各项系数为正,因此系统是稳定的。
由G(s)可知,系统是Ⅱ型系统,且K=8,故系统在21(),t t t 和 信号作用下的稳态误差分别为10,,K∞,故根据线性叠加原理有:系统的稳态误差为: 3-4 设舰船消摆系统如图3-1所示,其中n(t)为海涛力矩产生,且所有参数中除1K 外均为已知正值。





《自动控制理论》(二)第三章测试题一、单项选择题(每小题2分)1.对于欠阻尼的二阶系统,当阻尼比ξ保持不变时,( )A.无阻尼自然振荡频率ωn 越大,系统的峰值时间t p 越大B.无阻尼自然振荡频率ωn 越大,系统的峰值时间t p 越小C.无阻尼自然振荡频率ωn 越大,系统的峰值时间t p 不变D.无阻尼自然振荡频率ωn 越大,系统的峰值时间t p 不定11.系统特征方程式的所有根均在根平面的左半部分是系统稳定的( )A.充分条件B.必要条件C.充分必要条件D.以上都不是12.随动系统中常用的输入信号是斜坡函数和( )A.阶跃函数B.脉冲函数C.正弦函数D.抛物线函数3.二阶系统当0<ζ<1时,如果增加ζ,则输出响应的最大超调量p σ将( )A.增加B.减小C.不变D.不定2.一阶系统G(s)=1Ts K +的放大系数K 愈小,则系统的输出响应的稳态值( ) A.不变 B.不定 C.愈小 D.愈大7.主导极点的特点是( )A.距离实轴很远B.距离实轴很近C.距离虚轴很远D.距离虚轴很近5. 系统稳定的充分必要条件是其特征方程式的所有根均在根平面的( )A. 实轴上B. 虚轴上C. 左半部分D. 右半部分11. 对于欠阻尼的二阶系统,当无阻尼自然振荡频率ωn 保持不变时,( )A. 阻尼比ξ越大,系统的调整时间t s 越大B. 阻尼比ξ越大,系统的调整时间t s 越小C. 阻尼比ξ越大,系统的调整时间t s 不变D. 阻尼比ξ越大,系统的调整时间t s 不定1.控制系统的上升时间t r 、调整时间t S 等反映出系统的( )A.相对稳定性B.绝对稳定性C.快速性D.平稳性7.一阶系统的阶跃响应,( )。
A.当时间常数T 较大时有超调B.当时间常数T 较小时有超调C.有超调D.无超调2.时域分析中最常用的典型输入信号是( )A.脉冲函数B.斜坡函数C.阶跃函数D.正弦函数15.设单位负反馈控制系统的开环传递函数G o (s)=)a s (s K +,其中K>0,a>0,则闭环控制系统的稳定性与( )A.K 值的大小有关B.a 值的大小有关C.a 和K 值的大小有关D.a 和K 值的大小无关10. 对于一阶、二阶系统来说,系统特征方程式的所有系数都是正数是系统稳定的( )。


第三章习题参考答案(缺1张图)3-1 分三种情况讨论 (a) 当1>ζ时()()()()()⎥⎥⎦⎤⎢⎢⎣⎡-+----+-=-+-=---=⎪⎭⎫ ⎝⎛-+-⎪⎭⎫ ⎝⎛---221221222211112121,122ζζζζωζωζωζζωζζωζζωζζt t n n nn n n e e t t c s s (b) 当10<<ζ时()()()⎪⎪⎭⎫⎝⎛-----+-=---+---=-+-=---=---22222222222121121sin 1121sin 1211cos 221,1ζζζωζωζωζωζωζζωζωζωζωζζωζζζωζωζωarctg t et t e t et t c j s j s n tnnn t nn tnnn n n n n(c) 当1=ζ时3-3 (1)())24.0,/12.2(,%286.7%,6.46==±==ζωs rad s t M n s p ;(2)())5.0,/1(,%28%,3.16==±==ζωs rad s t M n s p ;(3)s t s 15=)25.1,/4.0(,==ζωs rad n ,过阻尼系统,无超调。
3-4 s rad n /588.19,598.0==ωζ. 3-7 (1) %).2(33.3,96.1,%49.9±===s t s t M s p p(2)44.240)()(2++=s s s R s C ,s rad n /2,6.0==ωζ. 3-8 (1) t te e t g 10601212)(--+-=;(2)60070600)()(2++=s s s R s C , s rad n /49.24,429.1==ωζ. 3-10 (1)系统稳定。
()⎪⎭⎫⎝⎛++-=-=-t e t t c s n t n nn n 21222,1ωωωωω(2)劳斯阵列第一列符号改变两次,根据劳斯判据,系统有两个极点具有正实部,系统不稳定。