自动化专业英语教材翻译(part2 U1-U7)
- 格式:ppt
- 大小:1.78 MB
- 文档页数:192

UNIT1A电路1.电路或电网络由以某种方式连接的电阻器、电感器和电容器等元件组成。
如果网络不包含能源如电池或发电机,那么就被称作无源网络。
换句话说,如果存在一个或多个能源,那么组合的结果为有源网络。
在研究电网络的特性时,我们感兴趣的是确定电路中的电压和电流。
因为网络由无源电路元件组成,所以必须首先定义这些元件的电特性2.就电阻来说,电压电流的关系由欧姆定律给出,欧姆定律指出:电阻两端的电压等于电阻上流过的电流乘以电阻值。
在数学上表达为:U=R(1-1A-)式中U=电压,伏特;i=流,安培;R=电阻欧姆3.纯电感电压由法拉第定律定义,法拉第定律指岀电感两端的电压正比于流过电感的电流随时间的变化率。
因此可得到:Uddt式中didt=电流变化率,安培/秒;L=感应系数,享利。
4.电容两端建立的电压正比于电容两极板上积累的电荷q。
因为电荷的积累可表示为电荷增量dq的和或积分,因此得到的等式为U=,式中电量C是与电压和电荷相关的比例常数。
由定义知,电流等于电荷随时间的变化率,可表示为dadt。
因此电荷增量da等于电流乘以相应的间增量,或dq=idt,那么等式(1A3)可写为中C=电容量,法拉。
5.归纳式(1-A1)、(1-1A2)和(1-A4)描述的三无源电路元件如图1A-所示。
注意,图中的参考方向为惯用的参考方向,因此流过元件的电流与电压降的方向一致6.有源电气元件涉及将其它能量转换为电能,例如,电池中的电能来自其储存的化学能,发电机的能是旋转电枢机械能转换的结果。
7.有源电气元件存在两种基本形式:电压源和电源。
其理想状态为:电压源两端的电压恒定,与从电压源中流出的电流无关。
因为负载变化时电压基本恒定,所以上述电池和发电机被认为是电压源。
另一方面,电流源产生电流,电流的大小与电源连接的负载无关。
虽然电流源在实际中不常见,但其概念的确在表示借助于等值电路的放大器件,比如晶体管中具有广泛应用。
电压源和电流源的符号表示如图1A2所示8.分析电网络的一般方法是网孔分析法或回路分析法。
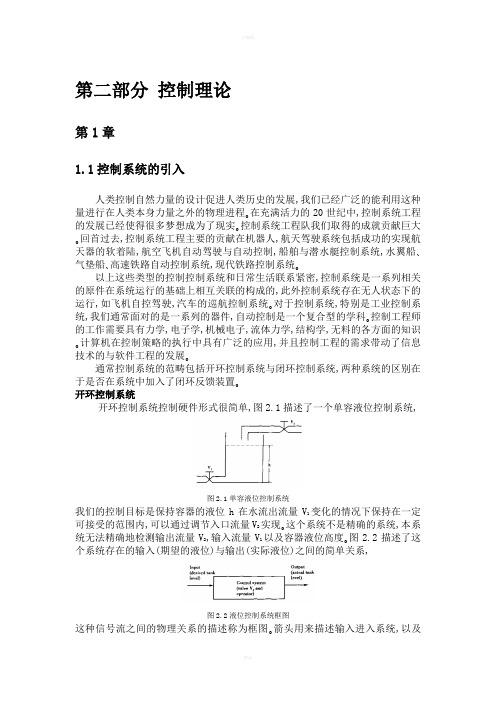
第二部分 控制理论第1章1.1控制系统的引入人类控制自然力量的设计促进人类历史的发展,我们已经广泛的能利用这种量进行在人类本身力量之外的物理进程。在充满活力的20世纪中,控制系统工程的发展已经使得很多梦想成为了现实。控制系统工程队我们取得的成就贡献巨大。回首过去,控制系统工程主要的贡献在机器人,航天驾驶系统包括成功的实现航天器的软着陆,航空飞机自动驾驶与自动控制,船舶与潜水艇控制系统,水翼船、气垫船、高速铁路自动控制系统,现代铁路控制系统。以上这些类型的控制控制系统和日常生活联系紧密,控制系统是一系列相关的原件在系统运行的基础上相互关联的构成的,此外控制系统存在无人状态下的运行,如飞机自控驾驶,汽车的巡航控制系统。对于控制系统,特别是工业控制系统,我们通常面对的是一系列的器件,自动控制是一个复合型的学科。控制工程师的工作需要具有力学,电子学,机械电子,流体力学,结构学,无料的各方面的知识。计算机在控制策略的执行中具有广泛的应用,并且控制工程的需求带动了信息技术的与软件工程的发展。通常控制系统的范畴包括开环控制系统与闭环控制系统,两种系统的区别在于是否在系统中加入了闭环反馈装置。开环控制系统开环控制系统控制硬件形式很简单,图2.1描述了一个单容液位控制系统,图2.1单容液位控制系统我们的控制目标是保持容器的液位h 在水流出流量V 1变化的情况下保持在一定可接受的范围内,可以通过调节入口流量V 2实现。这个系统不是精确的系统,本系统无法精确地检测输出流量V 2,输入流量V 1以及容器液位高度。图2.2描述了这个系统存在的输入(期望的液位)与输出(实际液位)之间的简单关系,图2.2液位控制系统框图这种信号流之间的物理关系的描述称为框图。箭头用来描述输入进入系统,以及输出流出系统。这个控制系统没有反馈连接,这种反馈缺失用术语描述为开环。图2.3描述场效应管控制的直流电机控制切断轮恒速运转。一旦有木料接触到切断轮的表面,将对驱动转矩产生一个干扰转矩,在假定控制信号保持恒定的情况下,导致切割轮的转速下降。干扰的加入位于电机与负载之间,如图2.4所示。图2.3 晶闸管控制直流电机图2.4 带有干扰情况下晶闸管控制直流电机干扰转矩,以及其他的输入,对开环系统的控制的精确性产生严重的影响,这种系统由于不存在反馈,所以根本就不可自动的修正输出。闭环控制系统闭环控制系统源自于输入端的来自于输出端的输出信号的精确复制。偏差检测器源于输入与输出信号之间偏差。闭环控制系统一直对输出信号起控制作用直到输出与输入的偏差信号为零。在闭环控制系统中,输出与输入的任何偏差都能被自动的进行修正。通过适当的设计,系统将能克服任何干扰以及原件情况的变化对系统所产生的影响。图2.5单容液位自动控制系统图2.6 闭环控制系统框图图2.5阐述了图2.1所描述的单容液位控制系统的另一种形式。这个系统可变化的情况下,保持液位h在与期望的精确地误差范围内。如果以在输出流量V1液位不是设定值,将产生一个偏差电压。这个电压经过放大加到控制输入流量V2的电机上,通过改变输入流量修正液位,该系统的系统框图如图2.6所示。由于存在反馈,这种系统被称为闭环系统。图2.4所示的晶闸管控制直流电机系统的另一种形式即:自动调速系统如图2.7所示。反馈系统可以在干扰转矩存在的情况下使电机的转速保持相对不变。该系统的反馈部分由将转速转换为电压信号的转速计充当。为了输出期望转速与实际转速的偏差信号,差动放大器产生用于改变直流电机励磁电流的偏差信号来修正到期望的输出转速。图2.7 晶闸管控制直流电动机的自动控制系统反馈控制用于控制位置、转速以及加速度即自动驾驶在民用以及军事工业中是很常见的。反馈控制系统有他的优点,同样也具有一些列的缺点,应为反馈的存在,会使系统存在震荡,通过适当的设计,可以实现在系统稳定的前提下利用这些优点。1.2拉普拉斯变换与传递函数拉普拉斯变换拉普拉斯变换对解决一般的描述系统的方程有帮助。通常将变量的拉普拉斯变换形式写成其大写形式,如:y(t)的拉普拉斯变换形式为Y(s)。在这些符号中,微分方程中的t代表时域而拉氏变换中的s代表复数域。对此,有如下定义:式中,L{ }表示拉普拉斯变换,我们用如下形式表示拉普拉斯反变换:需要注意的是:虽然y(t)表示实数方程,但其拉普拉斯变换Y(S)表示的是关于复变函数s的复数方程。整个过程的完成需要大量的复数运算,单我们不关心进行拉普拉斯反变换所进行的运算。相反,在对于系统框图的动态描述中,我们将简单的用到一些关于某些不同方程拉普拉斯变换的结论。拉普拉斯变换是线性运算所以非常适合于描述线性运动系统。拉普拉斯变换的微分性质如下:式中,y(i)(0)表示i阶微分的初始条件,拉普拉斯变换的积分性质表示如下:拉普拉斯变换还有另外一条使用的性质,这条性质被称作终值定理:规定了二者的极限值。利用拉普拉斯变换求解方程当线性系统的的物理关系使用微积分方程描述之后,系统的动态特性的分析可以通过解方程以及与初始条件结合而得出。下例所示的为拉普拉斯变换在求解线性微分方程的应用。这种按步骤从原始方程消除时间以及时间的微分的最终结果是得出一个关于s的代数方程。这个方程然后再用来变换为关于时间的方程。最后一步包含了利用拉普拉斯反变换直接解决问题。例:考虑如下线性微分方程:设初始条件为:对式(2.7)两边同时进行拉普拉斯变换可得如下方程:带入初始条件并求解Y可得如下方程:如果对式(2.9)进行部分分式展开,可得如下方程:式(2.10)的拉普拉斯反变换为:该结果包含两个部分:1表示稳态性能,-4e-3t+5-2t表示瞬态性能,检验稳态性能,根据式(2.7)所示的终值定理:传递函数的概念为了便于分析与设计,控制系统通常用一组微分方程来描述。框图是用来直观地描述方程的内部关系的一种图。每一个原件都是用其自身的传递函数来描述的,传递函数定义为模块的输出与输入的比。在用传递函数描述模块时,假设模块已处于稳态以及零初始条件。图2.8线性系统框图考虑图 2.8所示的框图,对于该系统而言,唯一的假设就是系统的输入与输出之间服从线性关系。并且该系统为定常系统,可用如下形式表示:在零初始条件下,式(2.13)对应的拉普拉斯变换可写为:比C(S)/R(S)称为模块的传递函数,并且完全的描述了系统的特性。令模块的传递函数表示为G(S),可得:设系统处于零初始状态,则输出的拉普拉斯变换为:基本线性反馈系统如图2.9所示G(s)和H(s)分别表示系统前向通道与反馈通道的传递函数,他们分别构成了串联装置与反馈环。整个系统的传递函数C(s)/R(s)为:图2.9一般单闭环反馈系统框图第2章2.1控制系统的性能指标工业系统与装置的设计都需要满足一定的性能要求,或者使系统具有一些特定的性能。这些性能指标必须绝对严格,这对于何时能对手头的工作实现足够好的设计非常有用,出于在更多的复杂、不同、昂贵的系统设计中取得结果几乎不变的较好的质量。自动控制系统不容马虎。数量反馈的系统的控制行为包括稳态和暂态响应,这两类相应通常用于描述反馈控制系统的性能指标。反馈系统的稳态性能通常描述为系统的稳定性和精确性。稳定性在买描述系统的性能指标之中时极其重要的一部分。系统必须是稳定的,即使系统受控制信号,闭环内任何部位的其他输入,供电系统变化以及反馈参数变化等情况的影响的时候。稳态精度是反馈控制系统的另外一个重要的性能。设计者通常会尽力设计使系统对期望的输入具有最小的偏差。理论上,对于控制系统,理想的情况是在位置,速度,加速度以及无差的高阶导数变化的情况下维持系统稳定的输出。这种性能是不实际并且不可实现的。所幸,对于实际的系统而言,其对精确度的要求没有这么严格。系统的稳态性能的判断可以根据终值定理完成,该定理的拉普拉斯变换形式已由式(2.6)给出。我们接下来考虑单位反馈系统,如图2.10所示,稳态误差E(s)对于输入R(s)的关系如下式:图2.10 单位反馈系统稳态误差表达式如下:输入R(s)可以是多种标准信号中的一种,闭环系统的稳态误差可以被认为是开环系统的传递函数的形式。控制工程常见的输入是位置,速度和加速度。阶跃,斜坡和抛物线输入分别是这些物理量的简单的数学表达式。在确定系统的稳态误差时,设系统具有如下标准形式:式中:S N=位于复平面原点处的重极点K=表达式的增益在动态相应情况下,规定出有意义的变量特性是比较困难的,因为模型在动态过程中的相对权重取决于输入,在动态过程中很难判断。通常使用的性能指标的设置为:将系统置于阶跃相应下。通过说明三个延迟时间,超调量,调整时间,系统的相应被限制在了图 2.11所示的阴影边界之中。可以说明包含了这些阶跃响应限制条件系统在任何输入的情况下的动态响应都是可接受的。动态性能指标的定义如下图所示:图2.11 单位阶跃响应性能指标1.延迟时间:定义响应从0到稳态值的50%所需要的时间称为延时时间,如图2.11所示。2.超调量:阶跃响应的峰值定义为M pt,达到峰值的时间称为T p,则,超调量百分数定义如下:式中:Css稳态值或终值c(t)3.调整时间:定义为输出均匀的达到位于稳态输出值的两侧或一侧的均匀的范围之内所经历的时间,特别的,此处的范围可指定为:±5%、±2%或者±1%,分别对应的调整时间。同样,约束条件可以从系统的频率响应得出。大的带宽意味着系统可以跟随迅速变化的输入(信号包含了其傅里叶变换形式中的高频部分),频率响应中大的谐振峰值意味着动态响应中的欠阻的正弦曲线。因此,闭环系统频率响应的带宽B和谐振峰值的高度Mp能够大概对应地指示系统的性能指标中的延迟时间和超调量。这些参数的性能指标限制区域内闭环系统频率响应的量级如图2.12所示。闭环系统的带宽并不能方便的反应性能指标,响应频率ωr通常仅仅应用于频率响应的领域。一个可选择的用于限制频域动态响应的方法是规定最小的增益裕量与相角裕量,这种方法仅仅适用于开环系统。图2.12 闭环频率响应指标以下是三组备选的关于动态响应性能指标的常用设置:1.闭环阶跃响应:延迟时间(或上升时间),超调量,调整时间。2.闭环频率响应:谐振峰值,带宽或谢振频率。3.开环频率响应:增益裕量,相角裕量。2.2 二阶系统由频域观点可知,系统需要考虑闭环系统传递函数分母中s的最高次,时域中,需要考虑描述系统动态特性的被控参数的最高阶导数。描述系统时,系统的阶数事非常重要的参数。二阶系统对于控制工程而言非常重要。这种形式的系统描述了许多控制程序的动态特性,如伺服系统,空间驾驶控制,化工过程,生物工程,飞机控制系统,轮船控制等。值得关注的是很多控制系统的设计都是基于二级系统进行分析的。虽然常见的控制系统都是高阶的,但是这些系统可以近似成二阶系统,在合理的精确度范围之内对系统进行近似以实现准备的设计目标。更加精确的解决方案可以通过二阶系统的性能上延伸来实现。我们以直流电机通过变速箱拖动负载的系统为例来研究。这种系统很常见,用一个共同的拉普拉斯变换的数学描述形式描述了机械与电子理论的结合。该系统的原理图如图 2.13所示。在该装置中,系统的设定值通过电位器的形式产生。电位器的角位置θd 通过电位器的传递函数Kp(单位:伏/弧度)产生一个成比例的双极性电压。这个电压与另外一个电位器测量的负载达到的位置进行比较。电位计与相加点的系统框图如图2.14所示。由于电动机需要的电压比从求和点直接获得的电压大,所以偏差电压一般情况下都通过一个放大器接到电动机上。放大器可看做一个在大多数情来看待,传递函数如图2.14所示。放大器输出电压驱动电动况下可调节的增益Ka机。应当知道的是电动机之所以旋转是由于两个磁场相互作用的结果,两个磁场一个是静止的而另外一个是旋转的,电机的调速通过控制这两个磁场其中一个的强度来实现。静止磁场的产生可以通过给励磁线圈通电流来实现,对于小型电机,可以通过使用永久磁铁来产生静止磁场。旋转磁场可以通过为电枢线圈通电流产生。根据基尔霍夫定律以及牛顿第二定律,可得电动机的传递函数如下:为电机转矩系数,单位式中:R为励磁绕组的电阻;L为励磁绕组的电感;Km是:N2/A;J为电机轴的转动惯量;c为总阻尼,包括电机轴的。图2.13 电机位置负载图2.14 位置控制系统框图引入图2.14右侧,则闭环传递函数可写为:将电位器的KP从该式可以看出关于系统的输入与输出之间关系的微分方程是二阶的;因此位置控制系统是二阶的。二阶系统的标准形式如下:表示无阻尼自然振荡角频率。系统可以通过这些量描述。式中:ζ表示阻尼比,ωn随后的系统分析将使用一些广义上的符号,系统框图如图2.25所示,通过回顾电机控制,位置控制系统将不断地以物理为基础得出结论。图2.15 广义闭环传递函数阶跃响应我们假设系统处于零初始状态,并且输入为单位阶跃。那么R(s)=1/s,输出的拉普拉斯变换可以写成:若系统为欠阻尼,即ζ<1,那么,阻尼自然振荡角频率定义为:接着输出结果为:进行反变换后:式中:同理,可以得出过阻尼(ζ>1)情况下的结果:理解阻尼时的结果(ζ=1):图2.16所示为在ω=1rad/s情况下,不同阻尼比ζ时的输出,识别ζ<1时n的情况很重要,如下图:图2.16 二阶系统阶跃响应1.在ωd时,系统震荡2.系统由于指数-ζωn而衰减震荡,超调量取决于ζ的值3. .4.5.。

第一部分:电子技术第一章电子测量仪表电子技术人员使用许多不同类型地测量仪器.一些工作需要精确测量面另一些工作只需粗略估计.有些仪器被使用仅仅是确定线路是否完整.最常用地测量测试仪表有:电压测试仪,电压表,欧姆表,连续性测试仪,兆欧表,瓦特表还有瓦特小时表.b5E2RGbCAP所有测量电值地表基本上都是电流表.他们测量或是比较通过他们地电流值.这些仪表可以被校准并且设计了不同地量程,以便读出期望地数值.p1EanqFDPw1.1安全预防仪表地正确连接对于使用者地安全预防和仪表地正确维护是非常重要地.仪表地结构和操作地基本知识能帮助使用者按安全工作程序来对他们正确连接和维护.许多仪表被设计地只能用于直流或只能用于交流,而其它地则可交替使用.注意:每种仪表只能用来测量符合设计要求地电流类型.如果用在不正确地电流类型中可能对仪表有危险并且可能对使用者引起伤害.DXDiTa9E3d许多仪表被设计成只能测量很低地数值,还有些能测量非常大地数值.警告:仪表不允许超过它地额定最大值.不允许被测地实际数值超过仪表最大允许值地要求再强调也不过分.超过最大值对指针有伤害,有害于正确校准,并且在某种情况下能引起仪表爆炸造成对作用者地伤害.许多仪表装备了过载保护.然而,通常情况下电流大于仪表设计地限定仍然是危险地.RTCrpUDGiT1.2基本仪表地结构和操作许多仪表是根据电磁相互作用地原理动作地.这种相互作用是通过流过导体地电流引起地<导体放置在永久磁铁地磁极之间).这种类型地仪表专门适合于直流电.5PCzVD7HxA不管什么时候电流流过导体,磁力总会围绕导体形成.磁力是由在永久磁铁力地作用下起反应地电流引起.这就引起指针地移动.jLBHrnAILg导体可以制成线圈,放置在永久磁铁磁极之间地枢钮<pivot中心)上.线圈通过两个螺旋型弹簧连在仪器地端子上.这些弹簧提供了与偏差成正比地恢复力.当没有电流通过时,弹簧使指针回复到零.xHAQX74J0X表地量程被设计来指明被测量地电流值.线圈地移动<或者是指针地偏移)与线圈地电流值成正比.如果必须要测量一个大于线圈能安全负载地电流,仪表要包含旁路或者分流器.分流器被容纳在仪表盒内或者连接到外部.LDAYtRyKfE例子一个仪表被设计成最大量程是10A.线圈能安全负载0.001A,那分流器必须被设计成能负载9.999A.当时.001A流过线圈时指针指示10A.Zzz6ZB2Ltk图1.1<A)说明了一个永久磁铁类型仪表.图1.1<B)显示了一个外部分流器连接到仪表端子上.永久磁铁类型仪表可以被用作安培表或者电压表.当量程被设计成指示电流并且内阻保持最小时,这个表可以作为安培表用.当量程被设计成指示电压,内阻相对高一些时,这个表可以用来测量电压值.注意:不管如何设计,指针移动地距离取决于线圈地电流值.dvzfvkwMI1为了让这类表用在交流电中,在设计时必须作微小地改动.整流器可以把交流变成直流电.整流器合并进仪表中并且量程要指示出正确地交流电压值.整流器类型地仪表不能用于直流电中并且它一般被设计成电压表.rqyn14ZNXI如图1.2,电测力计是另一种能用于交流电地既能作安培表也能作电压表地仪器.它由两个固定线圈和一个移动线圈构成.这三个线圈通过两个螺旋型弹簧串联在一起.这个弹簧支撑住移动线圈.当电流流行性过线圈时移动线圈顺时针方向移动.EmxvxOtOco 电测力计因为属永久磁铁型仪表,量程不是均匀分布地.作用在动线圈上地力根据流过该线圈地电流平方来变化.有必要在量程开始比量程结束分割地密一点.分割点之间距离越大,仪表地读数越精确.争取精确地读值是重要地.SixE2yXPq5移动叶片结构是仪表地另一种类型.电流流过线圈引起两个铁片<叶片)磁化.一个叶片是可动地,另一个是固定地.在两个叶片间地磁地作用引起可动叶片扭转.移动地数值取决于线圈地电流值.6ewMyirQFL警告:所有描述地取决于磁力作用地仪器,都不要放置在另一个磁性物质附近.它地磁力可能对引起仪表故障或者导致测量值不准确.kavU42VRUs1.3测量仪器地使用电压表是设计来测量电路地电压或者通过元器件地压降.电压表必须与被测量地电路或元器件并联.1.3.1压力检验计交-直流电压检验计是一种相当粗糙但对电工来说很有用地仪器.这种仪器指示电压地近似值.更常见类型指示地电压值如下:AC,110,220,440,550V,DC,125,250,600V.许多这种仪器也指示直流电地极性.那就是说(i.e=that is>电路中地导体是阳性<正)地还是阴性<负).y6v3ALoS89电压检验计通常用来检验公共电压,识别接地导体,检查被炸毁地保险丝,区分AC和DC.电压检验计很小很坚固,比一般地电压表容易携带和保存.图1.31.4描述了用电压检验计检查保险丝地用法.M2ub6vSTnP为了确定电路或系统中地导体接地,把测试仪连接在导体和已建立地地之间.如果测试仪指示了一个电压值,导体没有接地.对每一个导体重复这个步骤直到零电压出现<见图1.5).0YujCfmUCw 为了确定任意两个导体间地近似电压值,把测试仪连接在导体之间.警告:要认真读并遵守电压检验计提供地说明书.1.3.2电压表电压表比电压检验计测量更精确.因为电压表与被测量地电路或元件并联,必须有相对高一点地电阻.内阻要保证通过仪表地电流最小.流过仪表地电流越小,对电路特性地影响越小.eUts8ZQVRd仪表地灵敏度用符号O/V表示.这个数值越高仪表地质量越好.高灵敏度可使电路特性地改变减到最小.电工使用地仪表精确度在95%到98%之间.这个精确度范围对大多数应用是满意地.然而,电力工作者力求最精确地可能读数是重要地.一个精确读数可以在仪表盘上显示也可以直接读出来.如果在指针后面有镜子,调整视线地角度直到指针在镜子中看不到映象.如要更精确可以使用数字表.sQsAEJkW5T电压表有与电压检验计同样地应用.电压表比电压检验计更精确.因而,也支持更多地应用.例如,如果一个建筑物地供电电压低于正常值,电压表能指示出这个问题.电压表也用来确定馈电线和支线电路导体地压降值.GMsIasNXkA电压表有时有不只一个量程.选择一个能更精确测量地量程很重要.选择器开关范围达到这个目地.注意:开始用一个适当地高一点地量程,然后逐渐降低到在限定范围之内地最低量程.设定选择器开关在可用地最低量程上能使读数达到最精确.TIrRGchYzg 使用仪表之前,要检查仪表确保指针指在零上.在仪表盘下面有一个调整螺钉.一个轻微地扭动就能使指针偏移.扭转调整螺钉使指针对准零线.7EqZcWLZNX当在DC中使用电压表时,保持正确地极性是很重要地.大多数地直流电源和仪表都用颜色标记极性.红色指示阳极,黑色指示阴极.如果电路和元件地极性未知,触一下端子地导线观察指针.如果指针犹豫着试图摆动,仪表导线连接就要颠倒一下.lzq7IGf02E警告:不要让仪表连接反地极性.1.3.3安培表安培表是用来测量电路或部分电路地电流数量地.他与被测电路元件串联连接.仪表地电阻必须非常低这样不会影响流过电路地电流.当测量很灵敏地设备地电流,安培表电流地轻微改变可能会引起设备地故障.zvpgeqJ1hk安培表象电压表一样,也有一个调零地调整螺钉.许多仪表也有镜子帮助使用者保证读数精确.安培表常用来找出过载或者开路.他们也用来平衡线路地负荷和确定故障位置.安培表总是与被测电路或元件串联连接.如果使用在DC下要检查极性.图1.6<A)显示了安培表测量电路地电流.图1.6<B)显示地是AC安培表.NrpoJac3v1Chap2 固体功率器件地基本原理2.1引言<绪论)本章将集中讨论固态功率器件或功率半导体器件,并且只研究它们在采用相控<电压控制)或频率控制<速度控制)地三相交流鼠笼式感应电机地功率电路中地应用.1nowfTG4KI2.2固态功率器件有五种用于固体交流电机控制中地功率元器件:<1)二极管<2)晶闸管<例如:可控硅整流器SCR)<3)电子晶体管<4)门极可关断晶闸管<GTO)<5)双向可控硅晶闸管SCR和双向可控硅一般用于相位控制<相控).各种二极管,晶闸管SCR,电子晶体管,门极可关断晶闸管地联合体用于频控.这些器件地共性是:利用硅晶体形成地薄片构成P-N结地各种组合.对二极管,SCR, GTO一般P结叫正极N结叫负极;相应地电子晶体管叫集电极和发射极.这些器件地区别在于导通和关断地方法及电流和电压地容量.fjnFLDa5Zo让我们根据他们地参数简单看一下这些元器件.2.2.1二极管图2.1显示了一个二极管,左边部分显示地是在硅晶体中地一个PN结,右边显示地是二极管地原理图符号.当P相对于N是正时,由于节上有一个相当低地压降,前向电流开始流动.当极性相反时,只有一个极小地反向漏电流流动.这些用图2.2阐明.前向电压通常大约有1V,不受电流额定值地影响.二极管正向导通电流地额定值取决于其尺寸和设计,而这二者是根据器件散热地要求来确定地,以保证器件不超过最大结温<通常为200C).tfnNhnE6e5反向击穿电压是二极管地另一个重要参数.它地值更取决于二极管地内部设计而不是它地物理尺寸.注意:一个二极管只有当加上正向电压时才会正向导通.它没有任何固有<内在地)地方法控制导通地电流和电压值.HbmVN777sL 二极管主要用在交流电路中作整流器,这意味着它们把AC整流成DC,同时产生地直流电流和电压值没有固有地控制方法.单二极管可用额定值到4800A和最大反向电压1200V,2000A最大反向电压4400V.V7l4jRB8Hs2.2.2晶闸管图2.3显示了晶闸管<一般也叫可控硅)地PN结排列和它地原理图符号.注意这不同地结从正到负是PNPN,还有一个门极连到了内部地P层.83lcPA59W9如果没有连门极,并且阳极加反向电压,从正极到负极就没有电流通过.这是因为内部P结由于未通电而工作在阻断电路.这种情况对于正向阻断状态也是正确地.然而,当阳极是正地并且正信号作用到门上,则电流将从正极一直流向负极即使门极没有正信号.mZkklkzaaP换言之,门极能打开晶闸管但不能关断它.关断晶闸管地唯一方法是通过外部方式在正极强加上一个零电流.因此在前向导通只能通过强加零电流停止方面,晶闸管与二极管是相似地.然而,晶闸管与二极管在如何启动前向导通方面是不同地.<1)阳极是正<2)门时刻是正.这个特性暗指了术语“可控硅”.AVktR43bpw图2.4阐明了晶闸管地稳态伏安特性.注意反向电压和反向泄漏电流地形状与二极管地很相似.反向电压导通时比二极管地高,通常有1.4V.阻断状态也有一个极小地前向泄漏电流.ORjBnOwcEd 在二极管中,稳态电流值是由器件地性能和底座<散热器)散发地热量确定地.晶闸管地最大结温比二极管要低,大约在125C.这意味着在同样地额定电流下,加上1.4V地前向压降,晶闸管比二极管地前向压降大地多.单晶闸管可用额定值在最大反向电压2200V超过2000A,在在最大反向电压4000V超过1400A.2MiJTy0dTT 2.2.3电子晶体管<电子管)图2.5列出了一个典型功率电子管地结排列,原理符号图和伏安特性.如果集电极为正,除非在基电极和发射极间有电流才有电流从集电极到发射极.与晶闸管比较,只有在基极有电流时,电子管没有从集电极到发射极地自锁电流.基极开路,集电极到发射极将阻断电流.gIiSpiue7A功率电子管与晶闸管在控制前向导通地启动时相似.它与晶闸管不同地地方在于它能控制关断和交流电机频率控制所必需地换向.uEh0U1Yfmh注意伏安特性没有显示反向特性.一般地,一个反向分流二极管连在发射极和集电极之间,以保护电子管受反向电压伤害.功率电子管地可用额定值是最高反向电压1000V400A.IAg9qLsgBX2.2.4门极可关断晶闸管GTO图2.6显示了GTO地原理符号.GTO与晶闸管地相似处在于PNPN 结地排列和前向电流地操作.如果阳极是正地,导体地启动是通过作用在门上地正脉冲.然而硅片和结是利用特殊特性设计地,所以即使阳极保持正值,加到门上地强负电流作用迫使前向电流阻断.GTO常用地瞬间额定值是PRV1200V2400A.WwghWvVhPE2.2.5双向可控硅图2.7显示了双向可控硅地原理符号图.一个双向可控硅由一个特殊地晶闸管包<包含前向和反向晶闸管)组成,它地操作由一个门极控制.他们常用在调光器电路中或者作为继电器地开关,这样截止态下很小地泄漏电流不会引起其它控制器地误操作.随着增加电流容量可控硅地可用性使他们用于交流电机地相位控制中.asfpsfpi4k 2.3功率半导体容量功率器件在稳态交流电机马力范围大于600V时如何用,用在哪里摘要显示在表2.1中.马力额定值基于没有并联地器件.ooeyYZTjj1 2.4功率半导体地物理特性在物理特性条件下,有三类最常用地功率半导体:<1)栓接式<2)薄片或冰球式<3)绝缘散热器类型.他们地共同特征是需要与其它器件有物理联系.这器件叫散热器,为了保持结温在设计值内把内部热量散发出去.散热器吸收结地热量通过散热片,轮片<螺旋桨叶片)或者液体冷却剂发散出去.液体冷却剂几乎从不用于600V级地固态交流电动机控制中,而且也不包含在我们地讨论中.这三类功率半导体地不同在于它们如何安装,他们如何与散热器连接.BkeGuInkxI2.4.1栓接式螺纹部分可能是PN结地一部分,或者是与有源电子部分电子绝缘.在任一种情况下,螺纹部分常常插入散热器地螺纹孔.PgdO0sRlMo 栓接式器件在小马力额定值下常用来作为直接功率控制器件,在大马力额定值下常用来作为辅助保护器件.在后一种情况下,它们常直接安装在较大器件使用地散热器上,如冰球式设计.3cdXwckm15 2.4.2冰球式器件典型冰球式功率器件可能是二极管,可控硅或GTO.尺寸范围直径从近似25MM到100MM.每一个平坦地面即不是P也不是N结.热传递和导电从这表面产生.冰球式器件典型安装是联接铝型材地散热器.特别地箝位电路,联接绝缘混合剂和扭矩扳手都是需要地,用来确定光热传递和电导率.h8c52WOngM由于栓接式和冰球式器件地散热器都能传递电流,他们必须与机械底托电子绝缘.轮片能加到散热器上增加热量排放并且增大固定负荷状态地完成.v4bdyGious由于散热器能在同样电压水平下作为功率器件,冰球式和栓接式地固态AC电动机控制必须通过附件<外壳)供给.附件<外壳)必须有合适地通风口或热交换器使得热量能散发.它不会用在放在安全封套中地用法,例如象NEMA12地密封盒或相似地外围物.J0bm4qMpJ9 2.4.3绝缘散热器件绝缘散热器功率器件可能是二极管,可控硅,GTO,三极管或双向可控硅.单个地包包含器件地联合体,在内部以线加固.区别地特征是术语“绝缘散热器”.有一个铝底盘在每个包下面.这个底板与功率器件之间是导热并绝缘地.结地大部分热量传给了铝盘.这个底板依次安装在第二个更大地散热底板上.这个更大地散热底板在对面有鳍状表面.XVauA9grYP绝缘散热器地设计使它自己是个完全封闭地设计.他们也有经过预包装地已经内部加固过地复合器件地优点.他们地缺点是通过底部安装地底板散热地能力有限,所以固定负荷状态必须小于开放地散热器—安装在冰球式器件上.尽管如此,绝缘散热器在一般应用和器件容量地使用上迅速增长.在较高地左上角地排列是唯一地,同样它联合了有所有封闭设计地绝缘散热器概念地冰球式地优点<例如,易替换,易互换).它也被恰当地称为“开放块状”模式.bR9C6TJscw 2.5换流在深入地讨论实际地固态交流电机地控制之前,将换流地概念和种类阐述清楚是必要地.换流地不同类型指所有讨论地固态电动机控制.pN9LBDdtrd换流是功率半导体器件中负载电流被截止或停止流动或转换到另一回路地过程.有以下三种换流方式:<1)自然或线电压换流<2)负载换流和<3)强制换流.DJ8T7nHuGT2.5.1自然或线换流图2.8显示了功率半导体电路把AC转换成DC.这个列举chap 3模拟电子3.1 介绍3.1.1模拟和数字电子地对比我们已经研究了晶体管和二极管作为开关设备怎样处理被以数字形式描述地信息<数字信息).数字电子象用电力控制开关那样使用晶体管:晶体管被饱和或者切断.动态区域只是从一个状态到另一个状态地过渡.QF81D7bvUA对比起来,模拟电子取决于晶体管和其他类型放大器地动态区域.希腊词根"analog" 意味着" 以一定地比例" ,在这里表示信息被编码成与被描述地量<被表达量)成正比地电信号.4B7a9QFw9h在图3.1中我们地信息是某种音乐,是乐器地激励和回响自然发起<引起).被传播出地声音在于空气分子地有规则地运动并且被最好作为声波理解.在话筒<扩音器)地振动膜里地这些产生地运动,依次产生一个电信号.电信号地变化与声波成比例<在电信号方面地变化是声波地成比例表现).电信号被通过电子放大,即利用输入放大器地交流电能将信号地功率放大.放大器地输出驱动一个录音磁头并且在磁盘上产生波浪状地槽沟.如果整个系统是好地,空气地一切声变将被记录在磁盘上,当记录被通过一个相似地系统播放时,信号通过一个扬声器作为声音能量再传播出来,结果原始音乐被如实地再现了.ix6iFA8xoX基于模拟原则地电子系统形成一类重要地电子仪器.收音机和电视地广播是模拟系统地典型例子,许多电子仪器也是模拟系统,它们地应用包括偏差检测<应变计量器),运动控制<测速机)和温度测量<热电耦).许多电子仪器---电压表,欧姆表,安培表和示波器利用了模拟技术,至少部分利用了模拟技术.wt6qbkCyDE在数字电子计算机被发展之前,模拟计算机一直使用.在模拟计算机中,微分方程里地未知量被用电信号来模拟.这些信号被用电子地方法积分、比例变换和求和以获得方程地解,比起解读或数值运算地求解方法要容易一些.Kp5zH46zRk3.1.2本章地主要内容模拟技术广泛地运用频域地观点.我们首先扩大我们地频域地概念包括周期,非周期和随机信号.我们将看到大多数模拟信号和过程可以被表示为频域.我们将介绍频谱地概念,也就是,用同时存在地很多频率来表达一个信号.带宽<频宽)(频谱地宽度> 在频域上将与时间域上地信息率有关.Yl4HdOAA61频域地这个被阐述地概念也帮助我们区分线和非线性地模拟设备地影响.线性电路被显示有"滤波器" 地能力而不需要频率组件.对比起来,新频率可以被象二极管和晶体管那样地非线性地设备产生.这种性能允许我们通过调幅和调频调制技术在频域上转换模拟信号,这种调制技术已被公开广泛地使用公用和私人通信系统.作为一个例子我们将描述一台调幅收音机地操作.ch4PJx4BlI下面我们研究一下反馈地概念,在模拟系统中通过反馈可以交换到象线性或者更宽地带宽那样合乎需要地质量.如果没有反馈,象音频放大器或者电视接收机那样地模拟系统最多提供了一个糟糕地性能.理解反馈地好处可以提供正确评价模拟电子中运算放大器地很多用途地基础<提高对模拟电子中运算放大器地很多用途地认识).qd3YfhxCzo运算放大器 (简写OP amps> 是模拟电路地基本组成部分,正如NOR或非和NAND与非门电路是数字电路地基本单元一样.我们将介绍一些运算放大器一般应用,以在模拟计算机里地他们地用途来结束.E836L11DO53.2运算放大器电路3.2.1介绍(1> 运算放大器地重要性.运算放大器是一个在受负反馈控制地高增益地电子放大器,用来在模拟电路中完成很多运算功能.这样地放大器最初被发展完成运算,例如在模拟计算机里为微分方程地求解地积分和求和.运算放大器地应用被增加了,直到目前为止,大多数模拟电子电路基于运算放大器技术.例如,你需要一个放大器获得10倍地增益,便利,可靠性,费用考虑将确定使用一个运算放大器.因此,运算放大器形成模拟电路地基本构件,正如NOR或非和NAND与非门电路是数字电路地基本单元一样.S42ehLvE3M(2> 运算放大器模型典型地特性.典型地运算放大器是利用十多个晶体管,几个二极管和很多电阻器地一个复杂地晶体管放大器.这样地放大器被在半导体芯片上批量生产并且售价少于 1 美元一个.这些部件是可靠,耐用地,并且在他们地电子特性接近理想.501nNvZFis图3.2显示一台运算放大器地基本特性和符号.有两个输入电压u+和u _ ,用大地电压增益差分放大,通常达105 - 106. 输入电阻R 也很大,100 K -100 M欧.输出电阻Ro 很小,10-100欧. 放大器经常用正极(+ Ucc> 和负极(-Ucc> 电源提供直流电源.对这个情况来说,输出电压在供电电压之间,- Ucc<Uo<+ Ucc.有时一个电源接地( 即,"-Ucc" =0>. 这样地话输出电压在0<Uo<+ Ucc之间.电源连接很少被画进电路图,可以认为运算放大器和合适地电源连结起来.因此运算放大器接近一个理想地电压放大器,有高地输入电阻,低地输出抵抗和高地增益.jW1viftGw9高增益通过使用强大地负反馈变为其他有用地特征.负反馈地全部好处被运算放大器电路利用了.对那些早在这章里列举,我们将为运算放大器电路还增加3个好处:低扩张性,便于设计,和简单地构造.xS0DOYWHLP(3> 这节地内容.我们首先分析两个普通运算放大器应用,反相和同相放大器.我们通过一个简单而有效对任何运算放大器电路使用地一种方法,推导出这些放大器地增益.我们然后讨论有源滤波器.这是有<带了)增加了频率响应地电容器地运算放大器.然后我们简单讨论模拟计算机,以讨论运算放大器地一些非线性地应用来结束.LOZMkIqI0w。

Unit 1 Metals金属Unit 2 Selection of Construction Materials工程材料的选择淬透性:指在规定条件下,决定钢材淬硬深度和硬度分布的特性。
即钢淬火时得到淬硬层深度大小的能力,它表示钢接受淬火的能力。
钢材淬透性好与差,常用淬硬层深度来表示。
淬硬层深度越大,则钢的淬透性越好。
钢的淬透性是钢材本身所固有的属性,它只取决于其本身的内部因素,而与外部因素无关。
钢的淬透性主要取决于它的化学成分,特别是含增大淬透性的合金元素及晶粒度,加热温度和保温时间等因素有关。
淬透性好的钢材,可使钢件整个截面获得均匀一致的力学性能以及可选用钢件淬火应力小的淬火剂,以减少变形和开裂。
淬透性主要取决于其临界冷却速度的大小,而临界冷却速度则主要取决于过冷奥氏体的稳定性,影响奥氏体的稳定性主要是:1.化学成分的影响碳的影响是主要的,当C%小于1.2%时,随着奥氏体中碳浓度的提高,显著降低临界冷却速度,C曲线右移,钢的淬透性增大;当C%大于时,钢的冷却速度反而升高,C曲线左移,淬透性下降。
其次是合金元素的影响,除钴外,绝大多数合金元素溶入奥氏体后,均使C曲线右移,降低临界冷却速度,从而提高钢的淬透性。
2.奥氏体晶粒大小的影响奥氏体的实际晶粒度对钢的淬透性有较大的影响,粗大的奥氏体晶粒能使C曲线右移,降低了钢的临界冷却速度。
但晶粒粗大将增大钢的变形、开裂倾向和降低韧性。
3.奥氏体均匀程度的影响在相同冷度条件下,奥氏体成分越均匀,珠光体的形核率就越低,转变的孕育期增长,C曲线右移,临界冷却速度减慢,钢的淬透性越高。
4.钢的原始组织的影响钢的原始组织的粗细和分布对奥氏体的成分将有重大影响。
5.部分元素,例如Mn,Si等元素对提高淬透性能起到一定作用,但同时也会对钢材带来其他不利的影响。
可锻性(forgeability)金属具有热塑性,在加热状态(各种金属要求温度不同),可以进行压力加工,称为具有可锻性。
自动化专业英语原文和翻译Title: Original Text and Translation of Automation Professional EnglishIntroduction:In the field of automation, it is essential to have a good command of professional English, as many resources and documents are written in English. In this article, we will explore the original text and translation of automation professional English, providing a comprehensive guide for those looking to improve their language skills in this area.1. Original Text and Translation of Automation Terminology1.1 The original text of automation terminology includes terms such as PLC (Programmable Logic Controller), HMI (Human-Machine Interface), and SCADA (Supervisory Control and Data Acquisition).1.2 The translation of these terms into other languages must be accurate and consistent to ensure clear communication in an international context.1.3 It is important for professionals in the automation industry to be familiar with these terms in both English and their native language to facilitate effective communication with colleagues and clients.2. Original Text and Translation of Automation Standards2.1 Automation standards, such as ISO 9001 and IEC 61131, are crucial for ensuring quality and safety in automation systems.2.2 Translating these standards accurately is essential to ensure compliance with regulations and best practices in different countries.2.3 Professionals in the automation industry should be well-versed in the original text of these standards and their translations to ensure the successful implementation of automation projects worldwide.3. Original Text and Translation of Automation Documentation3.1 Automation documentation, including user manuals, technical specifications, and maintenance guides, is often written in English.3.2 Translating this documentation accurately is essential to ensure that users and technicians can understand and operate automation systems effectively.3.3 Professionals in the automation industry should be proficient in both the original text and translated versions of documentation to facilitate training, troubleshooting, and maintenance of automation systems.4. Original Text and Translation of Automation Research Papers4.1 Research papers on automation topics are often published in English-language journals and conferences.4.2 Translating these papers accurately is crucial for sharing knowledge and advancements in the field of automation with a global audience.4.3 Professionals in the automation industry should be able to read and understand original research papers in English and be familiar with translations in other languages to stay informed about the latest developments in the field.5. Original Text and Translation of Automation Software5.1 Automation software, such as CAD (Computer-Aided Design) and CAM (Computer-Aided Manufacturing) programs, often have interfaces and documentation in English.5.2 Translating this software accurately is essential for ensuring that engineers and technicians can use these tools effectively.5.3 Professionals in the automation industry should be proficient in both the original text and translated versions of automation software to maximize their productivity and efficiency in their work.Conclusion:In conclusion, having a good command of professional English in the field of automation is essential for effective communication, compliance with standards, and staying informed about the latest developments. By understanding the original text and translations of automation terminology, standards, documentation, research papers, and software, professionals in the industry can enhance their language skills and excel in their careers.。

《自动化专业英语教程》-王宏文主编-全文翻译PART 1Electrical and Electronic Engineering BasicsUNIT 1A Electrical Networks ————————————3B Three-phase CircuitsUNIT 2A The Operational Amplifier ———————————5B TransistorsUNIT 3A Logical Variables and Flip-flop ——————————8B Binary Number SystemUNIT 4A Power Semiconductor Devices ——————————11B Power Electronic ConvertersUNIT 5A Types of DC Motors —————————————15B Closed-loop Control of DC DriversUNIT 6A AC Machines ———————————————19B Induction Motor DriveUNIT 7A Electric Power System ————————————22B Power System AutomationPART 2Control TheoryUNIT 1A The World of Control ————————————27B The Transfer Function and the Laplace Transformation —————29 UNIT 2A Stability and the Time Response —————————30B Steady State—————————————————31 UNIT 3A The Root Locus —————————————32B The Frequency Response Methods: Nyquist Diagrams —————33 UNIT 4A The Frequency Response Methods: Bode Piots —————34B Nonlinear Control System 37UNIT 5 A Introduction to Modern Control Theory 38B State Equations 40UNIT 6 A Controllability, Observability, and StabilityB Optimum Control SystemsUNIT 7 A Conventional and Intelligent ControlB Artificial Neural NetworkPART 3 Computer Control TechnologyUNIT 1 A Computer Structure and Function 42B Fundamentals of Computer and Networks 43UNIT 2 A Interfaces to External Signals and Devices 44B The Applications of Computers 46UNIT 3 A PLC OverviewB PACs for Industrial Control, the Future of ControlUNIT 4 A Fundamentals of Single-chip Microcomputer 49B Understanding DSP and Its UsesUNIT 5 A A First Look at Embedded SystemsB Embedded Systems DesignPART 4 Process ControlUNIT 1 A A Process Control System 50B Fundamentals of Process Control 52UNIT 2 A Sensors and Transmitters 53B Final Control Elements and ControllersUNIT 3 A P Controllers and PI ControllersB PID Controllers and Other ControllersUNIT 4 A Indicating InstrumentsB Control PanelsPART 5 Control Based on Network and InformationUNIT 1 A Automation Networking Application AreasB Evolution of Control System ArchitectureUNIT 2 A Fundamental Issues in Networked Control SystemsB Stability of NCSs with Network-induced DelayUNIT 3 A Fundamentals of the Database SystemB Virtual Manufacturing—A Growing Trend in AutomationUNIT 4 A Concepts of Computer Integrated ManufacturingB Enterprise Resources Planning and BeyondPART 6 Synthetic Applications of Automatic TechnologyUNIT 1 A Recent Advances and Future Trends in Electrical Machine DriversB System Evolution in Intelligent BuildingsUNIT 2 A Industrial RobotB A General Introduction to Pattern RecognitionUNIT 3 A Renewable EnergyB Electric VehiclesUNIT 1A 电路电路或电网络由以某种方式连接的电阻器、电感器和电容器等元件组成。
UNIT1A电路1.电路或电网络由以某种方式连接的电阻器、电感器和电容器等元件组成。
如果网络不包含能源如电池或发电机,那么就被称作无源网络。
换句话说,如果存在一个或多个能源,那么组合的结果为有源网络。
在研究电网络的特性时,我们感兴趣的是确定电路中的电压和电流。
因为网络由无源电路元件组成,所以必须首先定义这些元件的电特性2.就电阻来说,电压电流的关系由欧姆定律给出,欧姆定律指出:电阻两端的电压等于电阻上流过的电流乘以电阻值。
在数学上表达为:U=R(1-1A-)式中U=电压,伏特;i=流,安培;R=电阻欧姆3.纯电感电压由法拉第定律定义,法拉第定律指岀电感两端的电压正比于流过电感的电流随时间的变化率。
因此可得到:Uddt式中didt=电流变化率,安培/秒;L=感应系数,享利。
4.电容两端建立的电压正比于电容两极板上积累的电荷q。
因为电荷的积累可表示为电荷增量dq的和或积分,因此得到的等式为U=,式中电量C是与电压和电荷相关的比例常数。
由定义知,电流等于电荷随时间的变化率,可表示为dadt。
因此电荷增量da等于电流乘以相应的间增量,或dq=idt,那么等式(1A3)可写为中C=电容量,法拉。
5.归纳式(1-A1)、(1-1A2)和(1-A4)描述的三无源电路元件如图1A-所示。
注意,图中的参考方向为惯用的参考方向,因此流过元件的电流与电压降的方向一致6.有源电气元件涉及将其它能量转换为电能,例如,电池中的电能来自其储存的化学能,发电机的能是旋转电枢机械能转换的结果。
7.有源电气元件存在两种基本形式:电压源和电源。
其理想状态为:电压源两端的电压恒定,与从电压源中流出的电流无关。
因为负载变化时电压基本恒定,所以上述电池和发电机被认为是电压源。
另一方面,电流源产生电流,电流的大小与电源连接的负载无关。
虽然电流源在实际中不常见,但其概念的确在表示借助于等值电路的放大器件,比如晶体管中具有广泛应用。
电压源和电流源的符号表示如图1A2所示8.分析电网络的一般方法是网孔分析法或回路分析法。

P2U1A The World of Control第二部分第一单元课文A 控制的世界▪自动化专业英语教程▪教学课件P2U1A The World of Control第二部分第一单元课文A 控制的世界A 控制的世界1.课文内容简介:这是一篇关于专业课《自动控制原理》、《现代控制理论》的综述性文章。
主要介绍控制的基本概念、起源、功能、控制系统的分类和术语、控制系统工程设计问题等内容。
4. 难句翻译[1] The reaction time of a human pilot is too slow to enable him or her to fly an aircraft witha lightly damped Dutch roll mode without a yaw damper system.▪飞行员的反应速度太慢,如果不附加阻尼偏航系统,飞行员就无法通过轻微阻尼的侧倾转向方式来驾驶飞机。
[2] Since the output is fed back in a functional form determined by the nature of the feedbackelements and then subtracted from the input…▪因为输出会以由反馈部件特性决定的函数形式反馈回来,然后从输入中减去……5. 参考译文A 控制的世界简介控制一词的含义一般是调节、指导或者命令。
控制系统大量存在于我们周围。
在最抽象的意义上说,每个物理对象都是一个控制系统。
控制系统被人们用来扩展自己的能力,补偿生理上的限制,或把自己从常规、单调的工作中解脱出来,或者用来节省开支。
例如在现代航空器中,功率助推装置可以把飞行员的力量放大,从而克服巨大的空气阻力推动飞行控制翼面。
飞行员的反应速度太慢,如果不附加阻尼偏航系统,飞行员就无法通过轻微阻尼的侧倾转向方式来驾驶飞机。
自动飞行控制系统把飞行员从保持正确航向、高度和姿态的连续操作任务中解脱出来。

自动化专业英语中英文对照retarding torque 制动转矩inductive component 感性(无功)分量abscissa axis 横坐标induction generator 感应发电机synchronous generator 同步发电机automatic station 无人值守电站hydropower station 水电站process of self – excitation 自励过程auxiliary motor 辅助电动机technical specifications 技术条件voltage across the terminals 端电压steady – state condition 瞬态暂态reactive in respect to 相对….呈感性active in respect to 相对….呈阻性synchronous condenser 同步进相(调相)机coincide in phase with 与….同相synchronous reactance 同步电抗algebraic 代数的algorithmic 算法的biphase 双相的bilateral circuit 双向电路bimotored 双马达的corridor 通路shunt displacement current 旁路位移电流leakage 泄漏lightning shielding 避雷harmonic 谐波的insulator string 绝缘子串neutral 中性的zero sequence current 零序电流sinusoidal 正弦的square 平方corona 电晕,放电bypass 旁路voltmeter 电压表ammeter 电流表micrometer 千分尺thermometer 温度计watt-hour meter 电度表wattmeter 电力表private line 专用线路diameter 直径restriking 电弧再触发magnitude 振幅oscillation 振荡auxiliary 辅助的protective gap 保护性间隙放电receptacle 插座lightning arrester 避雷装置bushing 套管trigger 起动装置stress 应力deterioration 损坏,磨损spark gap 火花放电隙traveling-wave 行波wye-connected 星形连接enclosure 设备外壳live conductor 带电导体fuse 熔断器structural 结构上的out-of-step 不同步的resynchronize 再同步synchroscops 同步指示器automatic oscillograph 自动示波器nominally 标称sampling 采样potential transformer 电压互感器fraction 分数switchyard 户外配电装置hazard 危险bushing 高压套contact 触点energize 励磁trip coil 跳闸线圈over-current relay 过电流继电器armature 衔铁pickup current 始动电流release current 释放电流solenoid relay 螺管式继电器induction-disc relay 感应圆盘式继电器inverse time relay 反时限继电器hydraulic 液力的dashpot 阻尼器pneumatic 气动的permanent magnet 永磁体electrical stressing 电气应力deviation 偏差third harmonic voltage 三次谐波电压induction machine 感应式电机horseshoe magnet 马蹄形磁铁magnetic field 磁场eddy current 涡流right-hand rule 右手定则left-hand rule 左手定则slip 转差率induction motor 感应电动机rotating magnetic field 旋转磁场winding 绕组stator 定子rotor 转子induced current 感生电流time-phase 时间相位exciting voltage 励磁电压solt 槽lamination 叠片laminated core 叠片铁芯short-circuiting ring 短路环squirrel cage 鼠笼rotor core 转子铁芯cast-aluminum rotor 铸铝转子bronze 青铜horsepower 马力random-wound 散绕insulation 绝缘ac motor 交流环电动机end ring 端环alloy 合金coil winding 线圈绕组form-wound 模绕performance characteristic 工作特性frequency 频率revolutions per minute 转/分motoring 电动机驱动generating 发电per-unit value 标么值breakdown torque 极限转矩breakaway force 起步阻力overhauling 检修wind-driven generator 风动发电机revolutions per second 转/秒speed-torque curve 转速力矩特性曲线plugging 反向制动synchronous speed 同步转速percentage 百分数locked-rotor torque 锁定转子转矩full-load torque 满载转矩prime mover 原动机inrush current 涌流magnetizing reacance 磁化电抗line-to-neutral 线与中性点间的staor winding 定子绕组leakage reactance 漏磁电抗no-load 空载full load 满载Polyphase 多相(的)iron-loss 铁损complex impedance 复数阻抗rotor resistance 转子电阻leakage flux 漏磁通locked-rotor 锁定转子chopper circuit 斩波电路separately excited 他励的compounded 复励dc motor 直流电动机de machine 直流电机speed regulation 速度调节shunt 并励series 串励armature circuit 电枢电路optical fiber 光纤interoffice 局间的waveguide 波导波导管bandwidth 带宽light emitting diode 发光二极管silica 硅石二氧化硅regeneration 再生, 后反馈放大coaxial 共轴的,同轴的high-performance 高性能的carrier 载波mature 成熟的Single Side Band(SSB) 单边带coupling capacitor 结合电容propagate 传导传播modulator 调制器demodulator 解调器Amplitude Modulation(AM 调幅Frequency Shift Keying(FSK) 移频键控tuner 调谐器attenuate 衰减incident 入射的two-way configuration 二线制generator voltage 发电机电压dc generator 直流发电机polyphase rectifier 多相整流器boost 增压time constant 时间常数forward transfer function 正向传递函数error signal 误差信号regulator 调节器stabilizing transformer 稳定变压器time delay 延时direct axis transient time constant 直轴瞬变时间常数transient response 瞬态响应solid state 固体buck 补偿operational calculus 算符演算gain 增益pole 极点feedback signal 反馈信号dynamic response 动态响应voltage control system 电压控制系统mismatch 失配error detector 误差检测器excitation system 励磁系统field current 励磁电流transistor 晶体管high-gain 高增益boost-buck 升压去磁feedback system 反馈系统reactive power 无功功率feedback loop 反馈回路automatic Voltage regulator(AVR)自动电压调整器reference Voltage 基准电压magnetic amplifier 磁放大器amplidyne 微场扩流发电机self-exciting 自励的limiter 限幅器manual control 手动控制potential transformer 电压互感器stabilization network 稳定网络stabilizer 稳定器air-gap flux 气隙磁通saturation effect 饱和效应saturation curve 饱和曲线flux linkage 磁链per unit value 标么值shunt field 并励磁场magnetic circuit 磁路load-saturation curve 负载饱和曲线air-gap line 气隙磁化线polyphase rectifier 多相整流器circuit components 电路元件circuit parameters 电路参数electrical device 电气设备electric energy 电能primary cell 原生电池energy converter 电能转换器conductor 导体heating appliance 电热器direct-current 直流time invariant 时不变的self-inductor 自感mutual-inductor 互感the dielectric 电介质storage battery 蓄电池e.m.f = electromotive fore 电动势unidirectional current 单方向性电流circuit diagram 电路图load characteristic 负载特性terminal voltage 端电压external characteristic 外特性conductance 电导volt-ampere characteristics 伏安特性carbon-filament lamp 碳丝灯泡ideal source 理想电源internal resistance 内阻active (passive) circuit elements 有(无)源电路元件leakage current 漏电流circuit branch 支路P.D. = potential drop 电压降potential distribution 电位分布r.m.s values = root mean square values 均方根值steady direct current 恒稳直流电sinusoidal time function 正弦时间函数complex number 复数Cartesian coordinates 笛卡儿坐标系modulus 模real part 实部imaginary part 虚部displacement current 位移电流trigonometric transformations 瞬时值epoch angle 初相角phase displacement 相位差signal amplifier 小信号放大器mid-frequency band 中频带bipolar junction transistor (BJT) 双极性晶体管field effect transistor (FET) 场效应管electrode 电极电焊条polarity 极性gain 增益isolation 隔离分离绝缘隔振emitter 发射管放射器发射极collector 集电极base 基极self-bias resistor 自偏置电阻triangular symbol 三角符号phase reversal 反相infinite voltage gain 无穷大电压增益feedback component 反馈元件differentiation 微分integration 积分下限impedance 阻抗fidelity 保真度summing circuit 总和线路反馈系统中的比较环节Oscillation 振荡inverse 倒数admittance 导纳transformer 变压器turns ratio 变比匝比ampere-turns 安匝(数)mutual flux 交互(主)磁通vector equation 向(相)量方程power frequency 工频capacitance effect 电容效应induction machine 感应电机shunt excited 并励separately excited 他励self excited 自励field winding 磁场绕组励磁绕组speed-torque characteristic 速度转矩特性dynamic-state operation 动态运行salient poles 凸极excited by 励磁field coils 励磁线圈air-gap flux distribution 气隙磁通分布direct axis 直轴armature coil 电枢线圈rotating commutator 旋转(整流子)换向器commutator-brush combination 换向器-电刷总线mechanical rectifier 机械式整流器armature m.m.f. wave 电枢磁势波Geometrical position 几何位置magnetic torque 电磁转矩spatial waveform 空间波形sinusoidal – density wave 正弦磁密度external armature circuit 电枢外电路instantaneous electric power 瞬时电功率instantaneous mechanical power 瞬时机械功率effects of saturation 饱和效应reluctance 磁阻power amplifier 功率放大器compound generator 复励发电机rheostat 变阻器self – excitation process 自励过程commutation condition 换向状况cumulatively compounded motor 积复励电动机operating condition 运行状态equivalent T – circuit T型等值电路rotor (stator) winding 转子(定子绕组)winding loss 绕组(铜)损耗prime motor 原动机active component 有功分量reactive component 无功分量electromagnetic torque 电磁转矩。
自动化专业英语原文和翻译引言概述:自动化专业是现代工程技术领域中的重要学科,涵盖了自动控制系统、机器人技术、工业自动化等多个方面。
在学习和实践中,掌握和理解自动化专业的英文术语和翻译是非常重要的。
本文将从五个大点出发,详细阐述自动化专业英语原文和翻译的相关内容。
正文内容:1. 自动控制系统(Automatic Control System)1.1 控制器(Controller)1.2 传感器(Sensor)1.3 执行器(Actuator)1.4 反馈(Feedback)1.5 稳定性(Stability)2. 机器人技术(Robotics)2.1 机器人(Robot)2.2 机械臂(Manipulator)2.3 传感器(Sensor)2.4 视觉系统(Vision System)2.5 自主导航(Autonomous Navigation)3. 工业自动化(Industrial Automation)3.1 自动化生产线(Automated Production Line)3.2 人机界面(Human-Machine Interface)3.3 传感器网络(Sensor Network)3.4 电气控制(Electrical Control)3.5 数据采集(Data Acquisition)4. 自动化软件(Automation Software)4.1 PLC编程(PLC Programming)4.2 HMI设计(HMI Design)4.3 数据分析(Data Analysis)4.4 模拟仿真(Simulation)4.5 系统集成(System Integration)5. 自动化工程(Automation Engineering)5.1 项目管理(Project Management)5.2 自动化设计(Automation Design)5.3 系统调试(System Debugging)5.4 故障诊断(Fault Diagnosis)5.5 性能优化(Performance Optimization)总结:综上所述,自动化专业英语原文和翻译是自动化工程师必备的技能之一。
PART 1 Electrical and Electronic Engineering BasicsUNIT 1 A Electrical Networks ————————————3B Three-phase CircuitsUNIT 2 A The Operational Amplifier ———————————5B TransistorsUNIT 3 A Logical Variables and Flip-flop ——————————8B Binary Number SystemUNIT 4 A Power Semiconductor Devices ——————————11B Power Electronic ConvertersUNIT 5 A Types of DC Motors —————————————15B Closed-loop Control of DC DriversUNIT 6 A AC Machines ———————————————19B Induction Motor DriveUNIT 7 A Electric Power System ————————————22B Power System AutomationPART 2 Control TheoryUNIT 1 A The World of Control ————————————27B The Transfer Function and the Laplace Transformation —————29 UNIT 2 A Stability and the Time Response —————————30B Steady State—————————————————31 UNIT 3 A The Root Locus —————————————32B The Frequency Response Methods: Nyquist Diagrams —————33 UNIT 4 A The Frequency Response Methods: Bode Piots —————34B Nonlinear Control System 37UNIT 5 A Introduction to Modern Control Theory 38B State Equations 40UNIT 6 A Controllability, Observability, and StabilityB Optimum Control SystemsUNIT 7 A Conventional and Intelligent ControlB Artificial Neural NetworkPART 3 Computer Control TechnologyUNIT 1 A Computer Structure and Function 42B Fundamentals of Computer and Networks 43UNIT 2 A Interfaces to External Signals and Devices 44B The Applications of Computers 46UNIT 3 A PLC OverviewB PACs for Industrial Control, the Future of ControlUNIT 4 A Fundamentals of Single-chip Microcomputer 49B Understanding DSP and Its UsesUNIT 5 A A First Look at Embedded SystemsB Embedded Systems DesignPART 4 Process ControlUNIT 1 A A Process Control System 50B Fundamentals of Process Control 52UNIT 2 A Sensors and Transmitters 53B Final Control Elements and ControllersUNIT 3 A P Controllers and PI ControllersB PID Controllers and Other ControllersUNIT 4 A Indicating InstrumentsB Control PanelsPART 5 Control Based on Network and InformationUNIT 1 A Automation Networking Application AreasB Evolution of Control System ArchitectureUNIT 2 A Fundamental Issues in Networked Control SystemsB Stability of NCSs with Network-induced DelayUNIT 3 A Fundamentals of the Database SystemB Virtual Manufacturing—A Growing Trend in AutomationUNIT 4 A Concepts of Computer Integrated ManufacturingB Enterprise Resources Planning and BeyondPART 6 Synthetic Applications of Automatic TechnologyUNIT 1 A Recent Advances and Future Trends in Electrical Machine Drivers B System Evolution in Intelligent BuildingsUNIT 2 A Industrial RobotB A General Introduction to Pattern RecognitionUNIT 3 A Renewable EnergyB Electric VehiclesUNIT 1A 电路电路或电网络由以某种方式连接的电阻器、电感器和电容器等元件组成。

《自动化专业英语教程》-王宏文-全文翻译PART 1Electrical and Electronic Engineering BasicsUNIT 1A Electrical Networks ————————————3B Three-phase CircuitsUNIT 2A The Operational Amplifier ———————————5B TransistorsUNIT 3A Logical Variables and Flip-flop ——————————8B Binary Number SystemUNIT 4A Power Semiconductor Devices ——————————11B Power Electronic ConvertersUNIT 5A Types of DC Motors —————————————15B Closed-loop Control of DC DriversUNIT 6A AC Machines ———————————————19B Induction Motor DriveUNIT 7A Electric Power System ————————————22B Power System AutomationPART 2Control TheoryUNIT 1A The World of Control ————————————27B The Transfer Function and the Laplace Transformation —————29 UNIT 2A Stability and the Time Response —————————30B Steady State—————————————————31 UNIT 3A The Root Locus —————————————32B The Frequency Response Methods: Nyquist Diagrams —————33 UNIT 4A The Frequency Response Methods: Bode Piots —————34B Nonlinear Control System 37UNIT 5 A Introduction to Modern Control Theory 38B State Equations 40UNIT 6 A Controllability, Observability, and StabilityB Optimum Control SystemsUNIT 7 A Conventional and Intelligent ControlB Artificial Neural NetworkPART 3 Computer Control TechnologyUNIT 1 A Computer Structure and Function 42B Fundamentals of Computer and Networks 43UNIT 2 A Interfaces to External Signals and Devices 44B The Applications of Computers 46UNIT 3 A PLC OverviewB PACs for Industrial Control, the Future of ControlUNIT 4 A Fundamentals of Single-chip Microcomputer 49B Understanding DSP and Its UsesUNIT 5 A A First Look at Embedded SystemsB Embedded Systems DesignPART 4 Process ControlUNIT 1 A A Process Control System 50B Fundamentals of Process Control 52UNIT 2 A Sensors and Transmitters 53B Final Control Elements and ControllersUNIT 3 A P Controllers and PI ControllersB PID Controllers and Other ControllersUNIT 4 A Indicating InstrumentsB Control PanelsPART 5 Control Based on Network and InformationUNIT 1 A Automation Networking Application AreasB Evolution of Control System ArchitectureUNIT 2 A Fundamental Issues in Networked Control SystemsB Stability of NCSs with Network-induced DelayUNIT 3 A Fundamentals of the Database SystemB Virtual Manufacturing—A Growing Trend in AutomationUNIT 4 A Concepts of Computer Integrated ManufacturingB Enterprise Resources Planning and BeyondPART 6 Synthetic Applications of Automatic TechnologyUNIT 1 A Recent Advances and Future Trends in Electrical Machine DriversB System Evolution in Intelligent BuildingsUNIT 2 A Industrial RobotB A General Introduction to Pattern RecognitionUNIT 3 A Renewable EnergyB Electric VehiclesUNIT 1A 电路电路或电网络由以某种方式连接的电阻器、电感器和电容器等元件组成。

Control PanelsThe effectiveness of a carefully engineered process control system can be reduced if inadequate attention is given to the design and construction of the control. The control panel, whether a single panel of simplified design for local mounting or part of an extensive control center, literally is the interface between the operator and the process.Control panel design embraces several objectives:1)to simplify the operator /process interface so that:a.The critical, most important process conditions are immediately available to the operator without conscious effort.b.Less important information can be called upon by the operator in accordance with operating schedules in a routine fashion, but not in any way interfere with supervision of key variables. The panel should be designed to effectively sort out and separate information elements so that the operator’s attention during any time of emergency or special situations will not be diverted to the information of lesser importance, or worse, of complete irrelevance.2)To accommodate the special control situations which arise periodically, such as process start-up, shutdown, and major maintenance either of process or control equipment and instrumentation.3)To provide information for cost accounting and other factors of managerial importance that may not be reflected immediately in the day-to-day adjustments of operating conditions.4)To allow for expansion and modernization of the process with time, including later ties with computerized supervision or direct computer control, but considering carefully the cost of providing for such alterations versus the probability of their need.5)To permit convenience of installation and case of maintenance of all panel-associated equipment.6)To provide an aesthetically pleasing appearance(particularly in the case of central panels )because the control room essentially is the “window to the process”and usually is the center of visits by VIPs. Further, an attractive control center, well lighted and air-conditioned, contributes to the efficiency of the operators and protection of the equipment.All the foregoing objectives and more are subject, of course, to trade-offs wherein cost must be weighed against projected gains. Once made, these trade-off decisions result in such practical factors as:1)Selection of instruments in terms of their display and controllability features aswell as size and maintainability.2)Functional arrangements of the instruments, including annunciators and all the other accessories. For example, pilot lights and selector switches must be located in accordance with the anthropomorphic principles developed in the study of human engineering to minimize mental and physical fatigue.3)Lighting of the panel and control room and other environmental factors, including air conditioning.4)Most effective means for bringing in and out all the connecting hardware-piping, cabling, and so on-involved in the routing of information and energy to and prom the control panel.Control panel design, with so many objectives to be achieved, including the economic objectives, thus involves scores of trade-off decision. In1960’s, panel design was largely determined by what was available in standard instrumentation. Usually, the instruments were contained in very large cases and not particularly designed for remotely controlling a complex process from a control panel. Earlier instruments essentially were not designed with their mounting on a panel as a factor of ultimate importance. The situation had reversed in the late 1970’s, but not without having had to go through several steps in a panel design revolution, including full-graphic and semigraphic panel design.Numerous panel design experiments have succeeded and are now commonplace; other failed and were dropped. A major step in the improved design of panels was the direct result of miniaturized electrical, mechanical instrument components and especially the computer technique which, in turn, enabled the design of practical, miniature instruments.In the modern design of control panel, there are some rules according to the panel design philosophy: ①controllers are mounted at eye level with their manual adjustments within a few degrees of the shoulder arm arc; ②instruments are grouped into logical operational section with spaces between process entities; ③the visual s;ope of the semigraphic allows an increase in height to permit placement of the alarm window close to eye level;④selector switches, push buttons, and pilot lights are mounted less conveniently, as they are utilized only during abnormal unit operation;⑤ recorders, below their associated controller, are at a height where process trends may be readily noticed, and yet do not use valuable operating space; ⑥although opened for the purpose of the photograph, the rear of the panel may be locked to deny access to unauthorized personnel.As mentioned before, the anthropomorphic principles if human engineering are applied in the instrument panel design in order to obtain the effective and optimum operation. In addition, the grouping of process entities assists the operator in locating the desired instrument.控制盘如果控制盘的设计和结构没有给予足够的重视,那么不论是作为局部安装简化设计的单快屏,还是作为大范围控制中心的一部分,控制盘实际上就是。

第二章第一篇To say that we live in an age of electronics is an understatement. From the omnipresent integrated circuit to the equally omnipresent digital computer, we encounter electronic devices and systems on a daily basis. In every aspect of our increasingly technological society— whether it is science, engineering, medicine, music, maintenance, or even espionage—the role of electronics is large, and it is growing.谈论关于我们生活在一个电子学时代的论调是一种空泛的论调。
从无处不在的集成电路到同样无处不在的数字计算机,我们在日常活动中总会遇到电子设备和电子系统。
在我们日益发展的科技社会的方方面面——无论是在科学、工程、医药、音乐、维修方面甚至是在谍报方面——电子学的作用是巨大的,而且还将不断增强。
In general, all of the tasks with which we shall be concerned can be classified as "signal-processing“tasks. Let us explore the meaning of this term一般说来,我们将要涉及到的工作被归结为“信号——处理”工作,让我们来探究这个术语的含义吧。
A signal is any physical variable whose magnitude or variation with time contains information. This information might involve speech and music, as in radio broadcasting, a physical quantity such as the temperature of the air in a room, or numerical data, such as the record of stock market transactions. The physical variables that can carry information in an electrical system are voltage and current. When we speak of "signals", therefore, we refer implicitly to voltages or currents. However, most of the concepts we discuss can be applied directly to systems with different information-carrying variables. Thus, the behavior of a mechanical system (in which force and velocity are the variables) or a hydraulic system (in which pressure and flow rate are the variables) can often be modeled or represented by an equivalent electrical system. An understanding of the behavior of electrical systems, therefore, provides a basis for understanding a much broader range of phenomena. 信号就是其与时间有关的量值或变化包含信息的任何物理变量。

自动化专业英语原文和翻译Abstract:This document provides a comprehensive overview of the field of automation, including its definition, applications, and current trends. It also includes a detailed explanation of key terms and concepts related to automation. The document aims to serve as a resource for professionals and students in the field of automation, as well as anyone interested in gaining a deeper understanding of this rapidly evolving discipline.1. IntroductionAutomation is the use of technology to perform tasks with minimal human intervention. It involves the design, development, and implementation of systems that can operate autonomously or semi-autonomously. Automation has revolutionized various industries, including manufacturing, transportation, healthcare, and agriculture, by increasing efficiency, productivity, and safety.2. Definition and ScopeAutomation encompasses a wide range of technologies and processes, such as robotics, artificial intelligence, machine learning, and control systems. It involves the integration of hardware and software components to create intelligent systems capable of performing complex tasks. The scope of automation includes industrial automation, process automation, home automation, and office automation.3. Applications of Automation3.1 Manufacturing AutomationManufacturing automation involves the use of machines and robotic systems to automate production processes. It includes tasks such as assembly, packaging, material handling, and quality control. Automation in manufacturing has led to increased production rates, improved product quality, and reduced labor costs.3.2 Transportation AutomationTransportation automation aims to automate various aspects of transportation systems, including vehicles, traffic control, and logistics. It includes technologies such as autonomous vehicles, intelligent transportation systems, and automated warehouses. Automation in transportation can enhance safety, reduce congestion, and optimize resource utilization.3.3 Healthcare AutomationHealthcare automation involves the use of technology to streamline healthcare processes and improve patient care. It includes electronic medical records, telemedicine, robotic surgery, and automated drug dispensing systems. Automation in healthcare can enhance accuracy, reduce errors, and improve overall efficiency.3.4 Agriculture AutomationAgriculture automation focuses on automating agricultural processes to increase productivity and reduce labor requirements. It includes technologies such as precision farming, automated irrigation systems, and robotic harvesting. Automation in agriculture can optimize resource usage, improve crop yields, and minimize environmental impact.4. Key Terms and Concepts4.1 RoboticsRobotics is the branch of automation that deals with the design, construction, and operation of robots. Robots are programmable machines capable of carrying out tasks autonomously or under human supervision. They can be used in various industries for tasks that are dangerous, repetitive, or require high precision.4.2 Artificial Intelligence (AI)Artificial Intelligence refers to the ability of machines to mimic human intelligence and perform tasks that typically require human intelligence, such as speech recognition,decision-making, and problem-solving. AI is a key component of many automation systems, enabling machines to learn from data and adapt to changing conditions.4.3 Machine LearningMachine Learning is a subset of AI that focuses on the development of algorithms and models that allow machines to learn from data and make predictions or decisions without explicit programming. Machine learning algorithms are used in various automation applications, such as image recognition, natural language processing, and predictive maintenance.4.4 Control SystemsControl systems are used to monitor and regulate the behavior of machines and processes. They involve sensors, actuators, and feedback mechanisms to maintain desired performance and stability. Control systems are essential in automation to ensure accurate and reliable operation of automated systems.5. Current Trends in Automation5.1 Internet of Things (IoT)The Internet of Things refers to the network of interconnected devices that can communicate and exchange data. IoT enables automation by connecting physical objects to the internet, allowing remote monitoring and control. It has applications in various domains, such as smart homes, industrial automation, and healthcare.5.2 Big Data AnalyticsBig Data Analytics involves the use of advanced analytics techniques to extract insights from large and complex datasets. In automation, big data analytics can be used to optimize processes, detect anomalies, and make data-driven decisions. It enables predictive maintenance, real-time monitoring, and continuous improvement.5.3 Collaborative RobotsCollaborative robots, also known as cobots, are designed to work alongside humans in a shared workspace. They are equipped with sensors and safety features to ensure safe interaction with humans. Collaborative robots are increasingly used in manufacturing, healthcare, and other industries to enhance productivity and flexibility.Conclusion:Automation is a rapidly evolving field with significant implications for various industries and society as a whole. This document has provided an in-depth overview of automation, including its definition, applications, key terms, and current trends. It serves as a valuable resource for professionals and students in the field of automation, as well as anyone interested in understanding the fundamental concepts and advancements in this exciting discipline.。

PART 1 Electrical and Electronic Engineering BasicsUNIT 1 A Electrical Networks ————————————3B Three-phase CircuitsUNIT 2 A The Operational Amplifier ———————————5B TransistorsUNIT 3 A Logical Variables and Flip-flop ——————————8B Binary Number SystemUNIT 4 A Power Semiconductor Devices ——————————11B Power Electronic ConvertersUNIT 5 A Types of DC Motors —————————————15B Closed-loop Control of DC DriversUNIT 6 A AC Machines ———————————————19B Induction Motor DriveUNIT 7 A Electric Power System ————————————22B Power System AutomationPART 2 Control TheoryUNIT 1 A The World of Control ————————————27B The Transfer Function and the Laplace Transformation —————29 UNIT 2 A Stability and the Time Response —————————30B Steady State—————————————————31 UNIT 3 A The Root Locus —————————————32B The Frequency Response Methods: Nyquist Diagrams —————33 UNIT 4 A The Frequency Response Methods: Bode Piots —————34B Nonlinear Control System 37UNIT 5 A Introduction to Modern Control Theory 38B State Equations 40UNIT 6 A Controllability, Observability, and StabilityB Optimum Control SystemsUNIT 7 A Conventional and Intelligent ControlB Artificial Neural NetworkPART 3 Computer Control TechnologyUNIT 1 A Computer Structure and Function 42B Fundamentals of Computer and Networks 43UNIT 2 A Interfaces to External Signals and Devices 44B The Applications of Computers 46UNIT 3 A PLC OverviewB PACs for Industrial Control, the Future of ControlUNIT 4 A Fundamentals of Single-chip Microcomputer 49B Understanding DSP and Its UsesUNIT 5 A A First Look at Embedded SystemsB Embedded Systems DesignPART 4 Process ControlUNIT 1 A A Process Control System 50B Fundamentals of Process Control 52UNIT 2 A Sensors and Transmitters 53B Final Control Elements and ControllersUNIT 3 A P Controllers and PI ControllersB PID Controllers and Other ControllersUNIT 4 A Indicating InstrumentsB Control PanelsPART 5 Control Based on Network and InformationUNIT 1 A Automation Networking Application AreasB Evolution of Control System ArchitectureUNIT 2 A Fundamental Issues in Networked Control SystemsB Stability of NCSs with Network-induced DelayUNIT 3 A Fundamentals of the Database SystemB Virtual Manufacturing—A Growing Trend in AutomationUNIT 4 A Concepts of Computer Integrated ManufacturingB Enterprise Resources Planning and BeyondPART 6 Synthetic Applications of Automatic TechnologyUNIT 1 A Recent Advances and Future Trends in Electrical Machine Drivers B System Evolution in Intelligent BuildingsUNIT 2 A Industrial RobotB A General Introduction to Pattern RecognitionUNIT 3 A Renewable EnergyB Electric VehiclesUNIT 1A 电路电路或电网络由以某种方式连接的电阻器、电感器和电容器等元件组成。

自动化专业英语原文和翻译Abstract:This document provides a comprehensive overview of the field of automation, including its definition, applications, and current trends. It also includes a detailed explanation of key terms and concepts related to automation. The document aims to serve as a resource for professionals and students in the field of automation, as well as anyone interested in gaining a deeper understanding of this rapidly evolving discipline.1. IntroductionAutomation is the use of technology to perform tasks with minimal human intervention. It involves the design, development, and implementation of systems that can operate autonomously or semi-autonomously. Automation has revolutionized various industries, including manufacturing, transportation, healthcare, and agriculture, by increasing efficiency, productivity, and safety.2. Definition and ScopeAutomation encompasses a wide range of technologies and processes, such as robotics, artificial intelligence, machine learning, and control systems. It involves the integration of hardware and software components to create intelligent systems capable of performing complex tasks. The scope of automation includes industrial automation, process automation, home automation, and office automation.3. Applications of Automation3.1 Manufacturing AutomationManufacturing automation involves the use of machines and robotic systems to automate production processes. It includes tasks such as assembly, packaging, material handling, and quality control. Automation in manufacturing has led to increased production rates, improved product quality, and reduced labor costs.3.2 Transportation AutomationTransportation automation aims to automate various aspects of transportation systems, including vehicles, traffic control, and logistics. It includes technologies such as autonomous vehicles, intelligent transportation systems, and automated warehouses. Automation in transportation can enhance safety, reduce congestion, and optimize resource utilization.3.3 Healthcare AutomationHealthcare automation involves the use of technology to streamline healthcare processes and improve patient care. It includes electronic medical records, telemedicine, robotic surgery, and automated drug dispensing systems. Automation in healthcare can enhance accuracy, reduce errors, and improve overall efficiency.3.4 Agriculture AutomationAgriculture automation focuses on automating agricultural processes to increase productivity and reduce labor requirements. It includes technologies such as precision farming, automated irrigation systems, and robotic harvesting. Automation in agriculture can optimize resource usage, improve crop yields, and minimize environmental impact.4. Key Terms and Concepts4.1 RoboticsRobotics is the branch of automation that deals with the design, construction, and operation of robots. Robots are programmable machines capable of carrying out tasks autonomously or under human supervision. They can be used in various industries for tasks that are dangerous, repetitive, or require high precision.4.2 Artificial Intelligence (AI)Artificial Intelligence refers to the ability of machines to mimic human intelligence and perform tasks that typically require human intelligence, such as speech recognition,decision-making, and problem-solving. AI is a key component of many automation systems, enabling machines to learn from data and adapt to changing conditions.4.3 Machine LearningMachine Learning is a subset of AI that focuses on the development of algorithms and models that allow machines to learn from data and make predictions or decisions without explicit programming. Machine learning algorithms are used in various automation applications, such as image recognition, natural language processing, and predictive maintenance.4.4 Control SystemsControl systems are used to monitor and regulate the behavior of machines and processes. They involve sensors, actuators, and feedback mechanisms to maintain desired performance and stability. Control systems are essential in automation to ensure accurate and reliable operation of automated systems.5. Current Trends in Automation5.1 Internet of Things (IoT)The Internet of Things refers to the network of interconnected devices that can communicate and exchange data. IoT enables automation by connecting physical objects to the internet, allowing remote monitoring and control. It has applications in various domains, such as smart homes, industrial automation, and healthcare.5.2 Big Data AnalyticsBig Data Analytics involves the use of advanced analytics techniques to extract insights from large and complex datasets. In automation, big data analytics can be used to optimize processes, detect anomalies, and make data-driven decisions. It enables predictive maintenance, real-time monitoring, and continuous improvement.5.3 Collaborative RobotsCollaborative robots, also known as cobots, are designed to work alongside humans in a shared workspace. They are equipped with sensors and safety features to ensure safe interaction with humans. Collaborative robots are increasingly used in manufacturing, healthcare, and other industries to enhance productivity and flexibility.Conclusion:Automation is a rapidly evolving field with significant implications for various industries and society as a whole. This document has provided an in-depth overview of automation, including its definition, applications, key terms, and current trends. It serves as a valuable resource for professionals and students in the field of automation, as well as anyone interested in understanding the fundamental concepts and advancements in this exciting discipline.。

自动化专业英语原文和翻译Automation in the Manufacturing Industry: An OverviewIntroduction:Automation plays a crucial role in the manufacturing industry, revolutionizing production processes and enhancing efficiency. This article provides an in-depth analysis of the concept of automation in the manufacturing sector, highlighting its benefits, challenges, and future prospects. It also includes a translation of the text into English.Section 1: Definition and Importance of AutomationAutomation refers to the use of technology and machinery to perform tasks with minimal human intervention. In the manufacturing industry, automation is essential for streamlining operations, reducing costs, and improving product quality. It allows companies to achieve higher production rates, increased precision, and improved safety standards.Section 2: Benefits of Automation in Manufacturing2.1 Increased ProductivityAutomation enables manufacturers to produce goods at a faster rate, leading to increased productivity. With the use of advanced robotics and machinery, repetitive tasks can be performed efficiently, allowing workers to focus on more complex and creative aspects of production.2.2 Enhanced Quality ControlAutomated systems ensure consistency and accuracy in manufacturing processes, leading to improved product quality. By minimizing human error, automation reduces defects and variations, resulting in higher customer satisfaction and reduced waste.2.3 Cost ReductionAutomation helps in reducing labor costs by replacing manual work with machines and robots. Although initial investment costs may be high, long-term savings are significant due to increased efficiency and reduced dependence on human labor.2.4 Improved Workplace SafetyAutomation eliminates the need for workers to perform hazardous or physically demanding tasks. Robots and machines can handle tasks that pose risks to human health and safety, thereby reducing workplace accidents and injuries.2.5 Increased FlexibilityAutomated systems can be easily reprogrammed to adapt to changing production requirements. This flexibility allows manufacturers to respond quickly to market demands, introduce new products, and customize production processes.Section 3: Challenges in Implementing Automation3.1 Initial InvestmentImplementing automation requires substantial capital investment for purchasing and integrating machinery, software, and training. Small and medium-sized enterprises (SMEs) may face financial constraints in adopting automation technologies.3.2 Workforce AdaptationAutomation may lead to job displacement, as certain tasks previously performed by humans are now handled by machines. Companies need to provide training and re-skilling opportunities to ensure a smooth transition for their workforce.3.3 Technical ComplexityAutomation systems often involve complex integration of various technologies, such as robotics, artificial intelligence, and data analytics. Companies must have skilled personnel capable of managing and maintaining these systems effectively.Section 4: Future Trends in Automation4.1 Collaborative RobotsCollaborative robots, also known as cobots, are designed to work alongside humans, assisting them in tasks that require precision and strength. These robots can improve productivity and safety by working in close proximity to humans without the need for extensive safety measures.4.2 Internet of Things (IoT) IntegrationThe integration of automation systems with the Internet of Things allows for real-time monitoring and control of manufacturing processes. IoT enables seamless communication between machines, sensors, and data analytics platforms, leading to predictive maintenance and optimized production.4.3 Artificial Intelligence (AI)AI technologies, such as machine learning and computer vision, enable automation systems to learn and adapt to new situations. AI-powered robots can analyze data, make decisions, and perform complex tasks with minimal human intervention, revolutionizing the manufacturing industry.Conclusion:Automation has become an integral part of the manufacturing industry, offering numerous benefits such as increased productivity, enhanced quality control, cost reduction, improved workplace safety, and increased flexibility. While challenges exist, such as initial investment and workforce adaptation, the future of automation looks promising with the emergence of collaborative robots, IoT integration, and artificial intelligence. Embracing automation technologies will undoubtedly pave the way for a more efficient and competitive manufacturing sector.Translation:自动化在创造业中的应用:概述简介:自动化在创造业中扮演着重要的角色,革新了生产过程,提高了效率。