直流电机的介绍
直流电机的特点是他们的多功用性。依靠不同的并励、串励和他励励磁绕组的组合,他们可以被设计为动态的和静态的运转方式从而呈现出宽广范围变化的伏安、-特性或速度-转矩特性。因为它简单的可操纵性,直流系统经常被用于需要大范围发动机转速或精确控制发动机的输出量的场合。
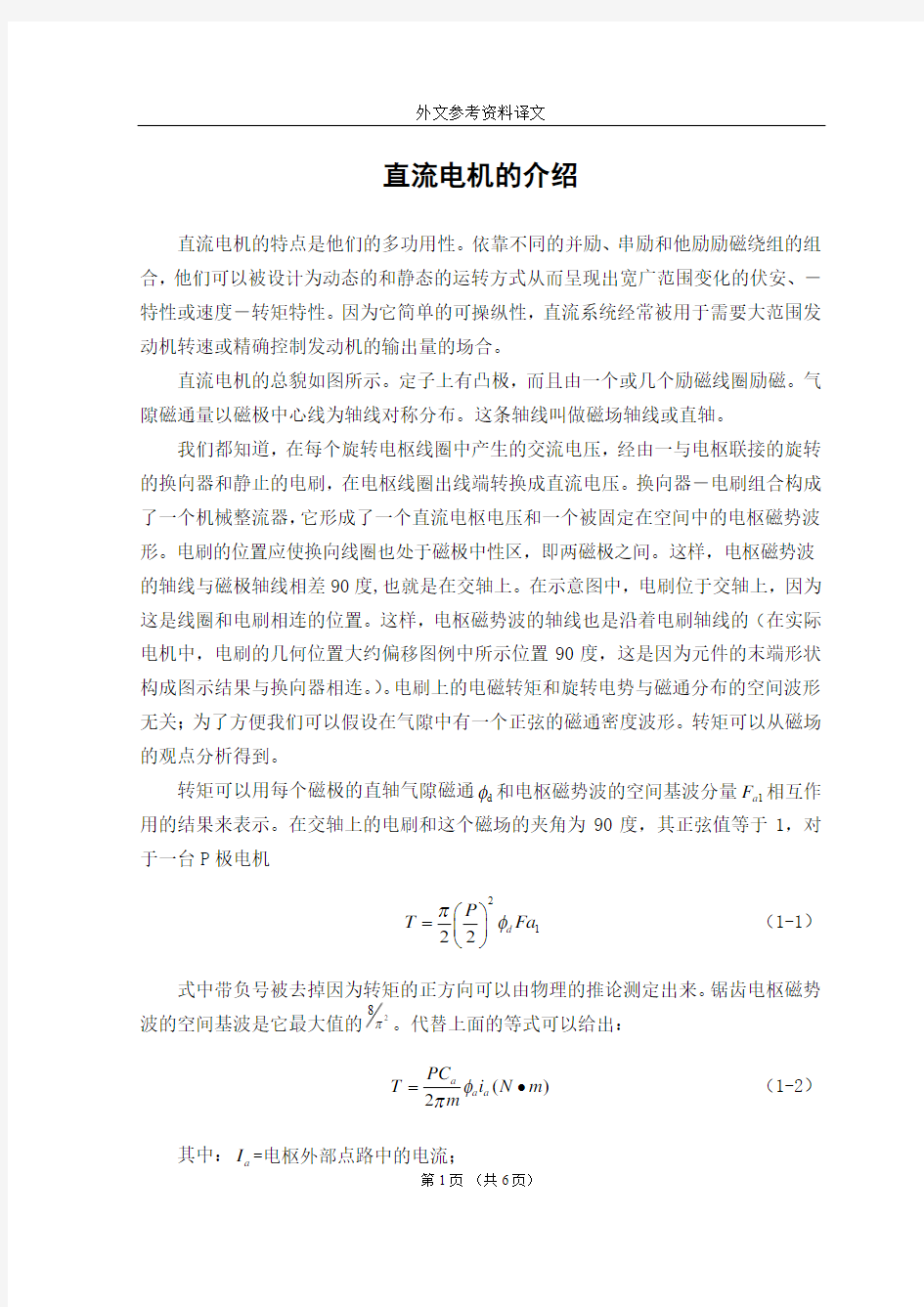
直流电机的总貌如图所示。定子上有凸极,而且由一个或几个励磁线圈励磁。气隙磁通量以磁极中心线为轴线对称分布。这条轴线叫做磁场轴线或直轴。
我们都知道,在每个旋转电枢线圈中产生的交流电压,经由一与电枢联接的旋转的换向器和静止的电刷,在电枢线圈出线端转换成直流电压。换向器-电刷组合构成了一个机械整流器,它形成了一个直流电枢电压和一个被固定在空间中的电枢磁势波形。电刷的位置应使换向线圈也处于磁极中性区,即两磁极之间。这样,电枢磁势波的轴线与磁极轴线相差90度,也就是在交轴上。在示意图中,电刷位于交轴上,因为这是线圈和电刷相连的位置。这样,电枢磁势波的轴线也是沿着电刷轴线的(在实际电机中,电刷的几何位置大约偏移图例中所示位置90度,这是因为元件的末端形状构成图示结果与换向器相连。)。电刷上的电磁转矩和旋转电势与磁通分布的空间波形无关;为了方便我们可以假设在气隙中有一个正弦的磁通密度波形。转矩可以从磁场的观点分析得到。
转矩可以用每个磁极的直轴气隙磁通d φ和电枢磁势波的空间基波分量1a F 相互作用的结果来表示。在交轴上的电刷和这个磁场的夹角为90度,其正弦值等于1,对于一台P 极电机
2
122d P T Fa πφ??= ???
(1-1) 式中带负号被去掉因为转矩的正方向可以由物理的推论测定出来。锯齿电枢磁势波的空间基波是它最大值的28
π。代替上面的等式可以给出: ()2a a a PC T i N m m
φπ=? (1-2) 其中:I =电枢外部点路中的电流;
C a =电枢绕组中总导体数;
m =通过绕组的并联支路数;
及 2a a PC K m
π= (1-3) 其为一个由绕组设计而确定的常数。
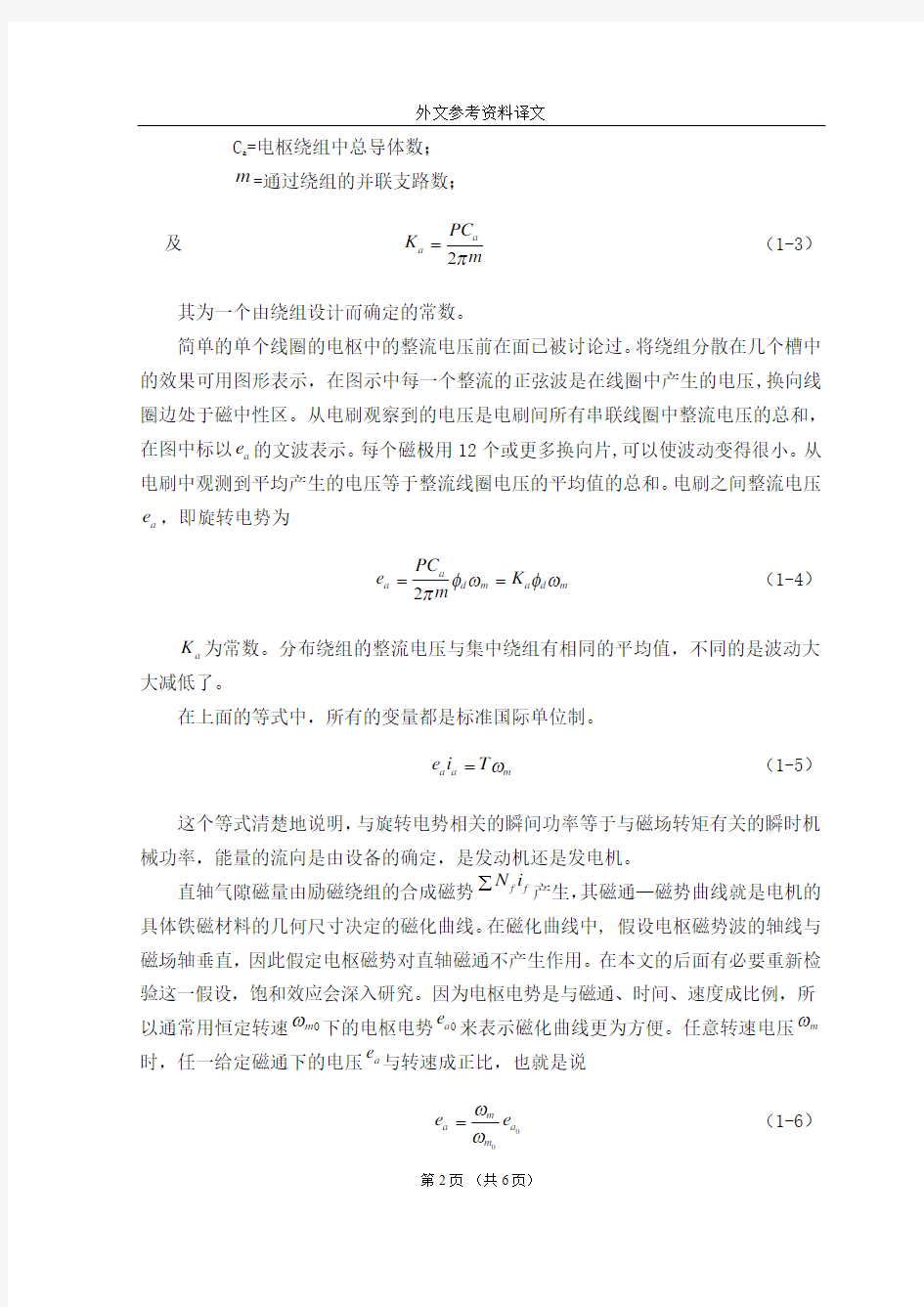
简单的单个线圈的电枢中的整流电压前在面已被讨论过。将绕组分散在几个槽中的效果可用图形表示,在图示中每一个整流的正弦波是在线圈中产生的电压,换向线圈边处于磁中性区。从电刷观察到的电压是电刷间所有串联线圈中整流电压的总和,在图中标以a e 的文波表示。每个磁极用12个或更多换向片,可以使波动变得很小。从电刷中观测到平均产生的电压等于整流线圈电压的平均值的总和。电刷之间整流电压a e ,即旋转电势为
2a a d m a d m PC e K m
φωφωπ== (1-4) a K 为常数。分布绕组的整流电压与集中绕组有相同的平均值,不同的是波动大大减低了。
在上面的等式中,所有的变量都是标准国际单位制。
a a m e i T ω= (1-5)
这个等式清楚地说明,与旋转电势相关的瞬间功率等于与磁场转矩有关的瞬时机械功率,能量的流向是由设备的确定,是发动机还是发电机。
直轴气隙磁量由励磁绕组的合成磁势f f N i ∑产生,其磁通—磁势曲线就是电机的
具体铁磁材料的几何尺寸决定的磁化曲线。在磁化曲线中, 假设电枢磁势波的轴线与磁场轴垂直,因此假定电枢磁势对直轴磁通不产生作用。在本文的后面有必要重新检验这一假设,饱和效应会深入研究。因为电枢电势是与磁通、时间、速度成比例,所以通常用恒定转速0m ω下的电枢电势0a e 来表示磁化曲线更为方便。任意转速电压m ω时,任一给定磁通下的电压a e 与转速成正比,也就是说 0
m a a m e e ωω= (1-6)
图中磁化曲线只有一个励磁绕组励磁的,这种曲线可以通过测试的方法轻松获得,不需要任何设计步骤的知识。
大范围励磁下的铁磁阻与空气气隙相比可以忽略不计,在这种情况下磁通与励磁绕组的总磁势成线性比例关系,比例常数就是直轴的气隙导磁性。
直流电机的显著优势源自于通过选择励磁绕组的励磁方式而获得不同的运转方式。励磁绕组可以从外部直流电源以他励的方式励磁,也可以以自励的方式励磁。换句话,直流电机可以提供自身励磁。励磁方式不仅极大地影响它的静态特性,而且极大地影响在控制系统中电机的动态性能。
他励发电机的联接图解已经给出的。所需的励磁电流只是电枢电流中的一小部分。在励磁电路中少量的功率可以控制相对一大部分电枢电路的功率。换句话说,发电机是一个功率放大器,当需要在大范围控制电枢电压时,他励发电机通常在反馈控制系统中使用。自励发电机的励磁绕组可以有三种不同的供电方式。励磁线圈可以与电枢串联起来,这便是串励发电机;励磁绕组可以与电枢并联在一起,这便是并励发电机。也可以同时以两种方式相连接组成一个复励发电机。为了引起自励过程,在自励发电机中必须存在剩磁。
在典型的静态伏-安特性中,假定原动机速度恒定,稳态电动势与端电压之间的关系为
t a a a V E I R =- (1-7)
其中a I 是电枢输出电流,a R 是电枢回路电阻。在发动机中,a E 大于t V 。电磁转矩T 是一个反转矩。
他励发电机的端电压随着负载电流的增大而轻微的减小,主要是因为电压在电枢电阻上的压降。串励发电机中的励磁电流与负载电流相同,所以气隙磁通和电压随负载变化很大,因此很少采用串励发电机。并励发电机电压随负载增加会有所下降,但在许多应用场合,这并不妨碍使用。复励发电机的连接通常使串励绕组的磁势与并励绕组磁势相加,其优点是通过串励绕组作用,每极磁通随着负载增加,从而产生一个随负载增加近似为常数的输出电压。通常,并励绕组匝数多,导线细;而绕在外部的串励绕组由于它必须承载电机的整个电枢电流,所以其构成的导线相对较粗。不论是并励还是复励发电机的电压都可借助并励磁场中的变阻器在适度的范围内得到调节。
所有励磁的方法在电动机上同样适用。在电动机典型的静态转速—转矩特性中,
电机端电压假设由恒压源供电,在电动机中感应的电势a E 与路端电压t V 间关系是
t a a a V E I R =+ (1-8)
a I 是电枢输入电流。电势a E 小于端电压t V 。电枢电流与发电机中的方向相反,且电磁转矩与电枢旋转方向相同。
对于并励与他励电动机来说,磁场磁通基本近似为常数,因此转矩的增加必须要求电枢电流近似成比例增大,同时为允许增大的电流通过小的电枢电阻,要求反电势稍有减少。由于反电势决定于磁通和转速,因此,转速必须稍稍降低。与鼠笼式感应电动机类似,并励电动机实际是一种从空载到满负荷的速度基本上只有5%的下降的恒速电动机。从起动转矩到达到最大转矩之间一直是被电枢电流所控制可以正常交替进行。
并励电动机的一个显著优点是速度控制,通过在并励绕组回路装上内部变阻器,励磁电流和每极磁通都可任意改变。而磁通的变化导致转速相反的变化以维持反电势大致等于外施加端电压。用这种方法我们可以获得最大调速范围为4或5比1,最高转速同样受到换向条件的限制。通过改变外施加电枢电压,可以获得很宽的调速范围。
对于串励电动机来说,电枢电流、电枢磁势波以及定子磁场磁通随负载增长而增长。因为由于负载增大而造成的磁通增大,速度必须降低,这样才可以维持反电势与外加电压之间的平衡。此外,由于磁通增加,所以转矩增大所引起电枢电流的增大比并励电动机中的要小。因此串励电动机是一种具有明显下降的转速-负载特性的变速发电机。对于要求转矩过载很多的应用场合,由于对应的过载功率随相应的转速下降而维持在一个合理的范围内。因此,这种特性具有特别的优越性。磁通随着电枢电流的增大而增大,同时还带来非常有用的起动特性。
在复励电动机中,串励磁场可以连接成积复励式,使其磁势与并励磁场相加;也可以连接成差复励式,两磁场方向相反,差复励很少使用。积复励电动机具有界于串励和并励之间的速度—负载特性,转速随负载的降低取决于并励磁场和串励磁场的相对安匝数。这种电动机没有像串励电动机那样轻载高转速的缺点,但它在相当的程度上保持着串励方式的优点。
直流电机的应用优势是可以连接成串励、并励及复励式等各种励磁方式。其中的一些特性我们已在本文中的提及到了。如果增加电刷可以通过换向器获得更多的电压,那么还会存在更多的应用场合,不论对人工的还是自动控制的适应性是它们的显
著特性。
一个直流电机是由两个基本元素组成:
-定子是电机固定的部分。它由以下基础组成;在结构中有一个磁轭;励磁磁极和绕组;换向极和绕组;有滑动轴承的端罩;电刷和电刷固定器;出线盒。
-转子是电机旋转的部分。它构成了一个中心,这个中心是安放在设备轴上并且已经平均地隔开,把电枢绕组放入槽中。还有一个换向器和一个风扇组成,被放在设备的轴上。
它用螺栓和底座固定在地板上。低压电机的磁轭和本身的结构是一体的,穿过励磁磁极闭合而产生的磁通量。它的结构和磁轭是用生铁和铸钢制造成的,有时候也用焊接的钢板。在低压和可控补偿整流器电机中,磁轭是由0.5~1毫米的薄铁板制成的。磁轭经常被安放在一个非铁磁性的结构内(通常是由铝合金制成,为了缩减重量)。在内部有两个端盖并且都包含球体和滑动轴承。
励磁磁极由用0.5~1mm的铁片通过用螺栓钉牢互相支撑。磁极被放入结构内的依靠螺栓固定。它们支撑绕组,让它运送励磁流动。在电枢上,磁极铁心的末端是极靴,它通过气隙有助于磁通量的分布。绕组被放置在一个绝缘结构内的中心处,被极靴保护。
励磁绕组是由绝热的圆形物或矩形的导体制成,并且和另一个连续或平行的相连接。绕组是以一个磁极的磁通量穿过气隙,然后被指引由极靴向电枢(北极),下一个磁极的磁通量由电枢到极靴(南极)。换向极的磁极就像主磁极,它组成了一个中心,末端在极靴中并且一个绕组绕在中心周围。它们被放在两个主磁极中间的对称轴,拴在磁轭上。换向极的磁极是由生铁或铸铁制成。换向极的绕组是由周围绝缘的或垂直的导线制成。它们相互平行或首尾连接,带动设备的主电流。
转子的中心是由0.5~1毫米硅合金薄板制成。薄板是通过清漆薄膜或氧化物涂层和其他物质绝缘。绝缘物质厚度为0.03~0.05毫米。目的是当它在磁场中旋转时涡流升高时,减少涡流。它变得很热将导致能量损失。在实心物的中心,它损失得很高,减少电机的效率和产生剧烈的热量。转子的中心包含了一些金属薄片。轴向的冷却管(8~10毫米)被嵌在金属薄片中给它更好的冷却。压力施加在中心的两端。转子的长度超过磁极2~5毫米,作用是减少磁力渗透性导致的轴向位移。转子的外围提供了槽放入电枢绕组。每个转子绕组包含了一个线圈直接绕在转子槽中依靠特殊设计机械或成行的线圈。绕组是绝缘的,依靠木制的或绝缘物质制成的槽楔保护它。绕
组过载是其弯曲,用钢丝相互连接为了抵抗由地心引力产生的变形。转子绕组的线圈交叉点连接到放在电枢轴的换向器上。换向器是圆柱体含有少量的铜。换向片是绝缘的。转子线圈被焊接在换向片上。低压电机的换向器片被分割成一个独立的单元,依靠合成树脂互相绝缘,例如人造树脂。为了连接电枢绕组固定接线端,一组电刷在换向器的表面上依靠支架滑动。电刷通过弹簧给予不变的压力连接换向片。卡钉安放在端盖上并且支撑碳刷支架。奇数的炭刷连接到电机的一个接线端上,偶数的炭刷连接到另一个接线端上。炭刷围绕换向器的外围等距隔开,有多少排炭刷就有等量的励磁磁极。
Introduction to D.C. Machines
D.C. machines are characterized by their versatility. By means of various combinations of shunt-, series-, and separately excited field windings they can be designed to display a wide variety of volt-ampere or speed-torque characteristics for both dynamic and steady state operation. Because of the ease with which they can be controlled, systems of D.C. machines are often used in applications requiring a wide range of motor speeds or precise control of motor output.
The essential features of a D.C. machine are shown schematically. The stator has salient poles and is excited by one or more field coils. The air-gap flux distribution created by the field winding is symmetrical about the centerline of the field poles. This is called the field axis or direct axis.
As we know, the A.C. voltage generated in each rotating armature coil is converted to
D.C. in the external armature terminals by means of a rotating commutator and stationary brushes to which the armature leads are connected. The commutator-brush combination forms a mechanical rectifier, resulting in a D.C. armature voltage as well as an armature m.m.f. Wave then is 90 electrical degrees from the axis of the field poles, i.e. in the quadrature axis. In the schematic representation the brushes are shown in quadrature axis because this is the position of the coils to which they are connected. The armature m.m.f. Wave then is along the brush axis as shown. (The geometrical position of the brushes in an actual machine is approximately 90 electrical degrees from their position in the schematic diagram because of the shape of the end connections to the commutator.)
The magnetic torque and the speed voltage appearing at the brushes are independent of the spatial waveform of the flux distribution; for convenience we shall continue to assume a sinusoidal flux-density wave in the air gap. The torque can then be found from the magnetic field viewpoint.
The torque can be expressed in terms of the interaction of the direct-axis air-gap flux
per pole d and space-fundamental component 1Fa of the armature m.m.f.wave. With
the brushes in the quadrature axis the angle between these fields is 90 electrical degrees,
and its sine equals unity. For a P pole machine
2
122d P T Fa πφ??= ???
(1-1) In which the minus sign gas been dropped because the positive direction of the torque can be determined from physical reasoning. The space fundamental 1Fa of the sawtooth armature m.m.f.wave is 28π times its peak. Substitution in above equation then gives
()2a a a PC T i N m m
φπ=? (1-2) Where, a I =current in external armature circuit;
a C =total number of conductors in armature winding; m =number of parallel paths through winding.
And
2a a PC K m
π= (1-3) is a constant fixed by the design of the winding.
The rectified voltage generated in the armature has already been discussed before for an elementary single-coil armature. The effect of distributing the winding in several slots is shown in figure. In which each of the rectified sine wave is the voltage generated in one of the coils, commutation taking place at the moment when the coil sides are in the neutral zone. The generated voltage as observed from the brushes and is the sum of the rectified voltages of all the coils in series between brushes and is shown by the rippling line labeled a e in figure. With a dozen or so commutator segments per pole, the ripple becomes very small and the average generated voltage observed from the brushes equals the sum of the average values of the rectified coil voltages. The rectified voltage a e between brushes, Known also as the speed voltage, is
2a a d m a d m PC e K m
φωφωπ== (1-4)
where K a is the design constant. The rectified voltage of a distributed winding has the same average value as that of a concentrated coil. The difference is that the ripple is greatly reduced.
From the above equations, with all variable expressed in SI units,
a a m e i T ω= (1-5)
This equation simply says that the instantaneous power associated with the speed voltage equals the instantaneous mechanical power with the magnetic torque. The direction of power flow being determined by whether the machine is acting as a motor or generator.
The direct-axis air-gap flux is produced by the combined m.m.f.f f N i ∑ of the field
windings. The flux-m.m.f. Characteristic being the magnetization curve for the particular iron geometry of the machine. In the magnetization curve, it is assumed that the armature –m.m.f. Wave is perpendicular to the field axis. It will be necessary to reexamine this assumption later in this chapter, where the effects of saturation are investigated more thoroughly. Because the armature e.m.f. is proportional to flux times speed, it is usually
more convenient to express the magnetization curve in terms of the armature e.m.f. 0a e at
a constant speed 0m ω. The voltage a e for a given flux at any other speed m ω is proportional to the speed, i.e.
00
m a a m e e ωω= (1-6) There is the magnetization curve with only one field winding excited. This curve can easily be obtained by test methods, no knowledge of any design details being required.
Over a fairly wide range of excitation the reluctance of the iron is negligible compared with that of the air gap. In this region the flux is linearly proportional to the total m.m.f. of the field windings, the constant of proportionality being the direct-axis air-gap permeance.
The outstanding advantages of D.C. machines arise from the wide variety of operating characteristics that can be obtained by selection of the method of excitation of the field windings. The field windings may be separately excited from an external D.C. source, or they may be self-excited; i.e. the machine may supply its own excitation. The method of
excitation profoundly influences not only the steady-state characteristics, but also the dynamic behavior of the machine in control systems.
The connection diagram of a separately excited generator is given. The required field current is a very small fraction of the rated armature current. A small amount of power in the field circuit may control a relatively large amount of power in the armature circuit; i.e. the generator is a power amplifier. Separately excited generators are often used in feedback control systems when control of the armature voltage over a wide range is required. The field windings of self-excited generators may be supplied in three different ways. The field may be connected in series with the armature, resulting in a series generator. The field may be connected in shunt with the armature, resulting in a shunt generator, or the field may be in two sections, one of which is connected in series and the other in shunt with the armature, resulting in a compound generator. With self-excited generators residual magnetism must be present in the machine iron to get the self-excitation process started.
In the typical steady-state volt-ampere characteristics, constant-speed prime movers being assumed. The relation between the steady state generated e.m.f. a E and the
terminal voltage
t
V
is
t a a a
V E I R
=-(1-7)
where a I is the armature current output and a R is the armature circuit resistance. In a generator,a E is larger than t V and the electromagnetic torque T is a counter torque opposing rotation.
The terminal voltage of a separately excited generator decreases slightly with increase in the load current, principally because of the voltage drop in the armature resistance. The field current of a series generator is the same as the load current, so that the air-gap flux and hence the voltage vary widely with load. As a consequence, series generators are normally connected so that the m.m.f. of the series winding aids that of the shunt winding. The advantage is that through the action of the series winding the flux per pole can increase with load, resulting in a voltage output that is nearly usually contains many turns of relatively small wire. The series winding, wound on the outside, consists of a few turns of comparatively heavy conductor because it must carry the full armature current of the
machine. The voltage of both shunt and compound generators can be controlled over reasonable limits by means of rheostats in the shunt field.
Any of the methods of excitation used for generators can also be used for motors. In the typical steady-state speed-torque characteristics, it is assumed that motor terminals are supplied from a constant-voltage source. In a motor the relation between the e.m.f. a E generated in the armature and terminal voltage t V is
t a a a V E I R =+ (1-8)
where a I is now the armature current input. The generated e.m.f. a E is now smaller than the terminal voltage t V , the armature current is in the opposite direction to that in a generator, and the electron magnetic torque is in the direction to sustain rotation of the armature.
In shunt and separately excited motors the field flux is nearly constant. Consequently increased torque must be accompanied by a very nearly proportional increase in armature current and hence by a small decrease in counter e.m.f. to allow this increased current through the small armature resistance. Since counter e.m.f. is determined by flux and speed, the speed must drop slightly. Like the squirrel-cage induction motor, the shunt motor is substantially a constant-speed motor having about 5% drop in speed from no load to full load. Starting torque and maximum torque are limited by the armature current that can be commutated successfully.
An outstanding advantage of the shunt motor is case of speed control. With a rheostat in the shunt-field circuit, the field current and flux per pole can be varied at will, and variation of flux causes the inverse variation of speed to maintain counter e.m.f. approximately equal to the impressed terminal voltage. A maximum speed range of about 4 or 5 to I can be obtained by this method. The limitation again being commutating conditions. By variation of the impressed armature voltage, very speed ranges can be obtained.
In the series motor, increase in load is accompanied by increase in the armature current and m.m.f. and the stator field flux (provided the iron is not completely saturated). Because flux increase with load, speed must drop in order to maintain the balance between
impressed voltage and counter e.m.f. Moreover, the increased in armature current caused by increased torque is varying-speed motor with a markedly drooping speed-load characteristic. For applications requiring heavy torque overloads, this characteristic is particularly advantageous because the corresponding power overloads are held to more reasonable values by the associated speed drops. Very favorable starting characteristics also result from the increase flux with increased armature current.
In the compound motor the series field may be connected either cumulatively, so that its m.m.f. adds to that of the shunt field, or differentially, so that it opposes. The differential connection is very rarely used. A cumulatively compounded motor has speed-load characteristic intermediate between those of a shunt and a series motor, the drop of speed with load depending on the relative number of ampere-turns in the shunt and series fields. It does not have disadvantage of very high light-load speed associated with a series motor, but it retains to a considerable degree the advantages of series excitation.
The application advantages of D.C. machines lie in the variety of performance characteristics offered by the possibilities of shunt, series and compound excitation. Some of these characteristics have been touched upon briefly in this article. Still greater possibilities exist if additional sets of brushes are added so that other voltages can be obtained from the commutator. Thus the versatility of D.C. machine system and their adaptability to control, both manual and automatic, are their outstanding features.
A D.C machines is made up of two basic components:
-The stator which is the stationary part of the machine. It consists of the following elements: a yoke inside a frame; excitation poles and winding; commutating poles (composes) and winding; end shield with ball or sliding bearings; brushes and brush holders; the terminal box.
-The rotor which is the moving part of the machine. It is made up of a core mounted on the machine shaft. This core has uniformly spaced slots into which the armature winding is fitted. A commutator, and often a fan, is also located on the machine shaft.
The frame is fixed to the floor by means of a bedplate and bolts. On low power machines the frame and yoke are one and the same components, through which the
magnetic flux produced by the excitation poles closes. The frame and yoke are built of cast iron or cast steel or sometimes from welded steel plates.
In low-power and controlled rectifier-supplied machines the yoke is built up of thin (0.5~1mm) laminated iron sheets. The yoke is usually mounted inside a non-ferromagnetic frame (usually made of aluminum alloys, to keep down the weight). To either side of the frame there are bolted two end shields, which contain the ball or sliding bearings.
The (main)excitation poles are built from 0.5~1mm iron sheets held together by riveted bolts. The poles are fixed into the frame by means of bolts. They support the windings carrying the excitation current.
On the rotor side, at the end of the pole core is the so-called pole-shoe that is meant to facilitate a given distribution of the magnetic flux through the air gap. The winding is placed inside an insulated frame mounted on the core, and secured by the pole-shoe.
The excitation windings are made of insulated round or rectangular conductors, and are connected either in series or in parallel. The windings are liked in such a way that the magnetic flux of one pole crossing the air gap is directed from the pole-shoe towards the armature (North Pole), which the flux of the next pole is directed from the armature to the pole-shoe (South Pole).
The commutating poles, like the main poles, consist of a core ending in the pole-shoe and a winding wound round the core. They are located on the symmetry (neutral) axis between two main poles, and bolted on the yoke. Commutating poles are built either of cast-iron or iron sheets.
The windings of the commutating poles are also made from insulated round or rectangular conductors. They are connected either in series or in parallel and carry the machine's main current.
The rotor core is built of 0.5~1mm silicon-alloy sheets. The sheets are insulated from one another by a thin film of varnish or by an oxide coating. Both some 0.03~0.05mm thick. The purpose is to ensure a reduction of the eddy currents that arise in the core when it rotates inside the magnetic field. These currents cause energy losses that turn into heat.
In solid cores, these losses could become very high, reducing machine efficiency and producing intense heating.
The rotor core consists of a few packets of metal sheet. Redial or axial cooling ducts (8~10mm inside) are inserted between the packets to give better cooling. Pressure is exerted to both side of the core by pressing devices foxed on to the shaft. The length of the rotor usually exceeds that of the poles by 2~5mm on either side-the effect being to minimize the variations in magnetic permeability caused by axial armature displacement. The periphery of the rotor is provided with teeth and slots into which the armature winding is inserted.
The rotor winding consists either of coils wound directly in the rotor slots by means of specially designed machines or coils already formed. The winding is carefully insulated, and it secured within the slots by means of wedges made of wood or other insulating material.
The winding overcharge are bent over and tied to one another with steel wire in order to resist the deformation that could be caused by the centrifugal force.
The coil-junctions of the rotor winding are connected to the commutator mounted on the armature shaft. The commutator is cylinder made of small copper. Segments insulated from one another, and also from the clamping elements by a layer of minacity. The ends of the rotor coil are soldered to each segment.
On low-power machines, the commutator segments form a single unit, insulated from one another by means of a synthetic resin such as Bakelite.
To link the armature winding to fixed machine terminals, a set of carbon brushes slide on the commutator surface by means of brush holders. The brushes contact the commutator segments with a constant pressure ensured by a spring and lever. Clamps mounted on the end shields support the brush holders.
The brushes are connected electrically-with the odd-numbered brushes connected to one terminal of the machine and the even-numbered brushes to the other. The brushes are equally spaced round the periphery of the commutator-the number of rows of brushes being equal to the number of excitation poles.
直流电机的介绍 -- 中英文翻译资料
Introduction to D.C. Machines D.C. machines are characterized by their versatility. By means of various combinations of shunt-, series-, and separately excited field windings they can be designed to display a wide variety of volt-ampere or speed-torque characteristics for both dynamic and steady state operation. Because of the ease with which they can be controlled, systems of D.C. machines are often used in applications requiring a wide range of motor speeds or precise control of motor output. The essential features of a D.C. machine are shown schematically. The stator has salient poles and is excited by one or more field coils. The air-gap flux distribution created by the field winding is symmetrical about the centerline of the field poles. This is called the field axis or direct axis. As we know, the A.C. voltage generated in each rotating armature coil is converted to D.C. in the external armature terminals by means of a rotating commutator and stationary brushes to which the armature leads are connected. The commutator-brush combination forms a mechanical rectifier, resulting in a D.C. armature voltage as well as an armature m.m.f. Wave then is 90 electrical degrees from the axis of the field poles, i.e. in the quadrature axis. In the schematic representation the brushes are shown in quadrature axis because this is the position of the coils to which they are connected. The armature m.m.f. Wave then is along the brush axis as shown. (The geometrical position of the brushes in an actual machine is approximately 90 electrical degrees from their position in the schematic diagram because of the shape of the end connections to the commutator.) The magnetic torque and the speed voltage appearing at the brushes are independent of the spatial waveform of the flux distribution; for convenience we shall continue to assume a sinusoidal flux-density wave in the air gap. The torque can then be found from the magnetic field viewpoint. The torque can be expressed in terms of the interaction of the direct-axis air-gap flux per pole d and space-fundamental component Fa1 of the armature m.m.f.wave.
微机原理及应用B 课程设计任务书 2010-2011学年第 2学期第 19 周- 19 周 题目直流电机控制 内容及要求 内容:设计一直流电机控制系统,实现对电机的正转,反转和速度控制 要求:1、用proteus画出原理图; 2、用c语言或汇编编写程序; 3、实现对电机的正转,反转和速度控制 进度安排 1、方案论证 0.5天 2、分析、设计、调试、运行 4天 3、检查、整理、写设计报告、小结 0.5天 学生姓名:5组(组长:25盛夏;组员:23彭亚彬,24阮水盛,26陶志鹏)指导时间2011年6月27日至2011年7月1日指导地点:F 楼 613室任务下达2011年6月 27日任务完成2011 年7 月 1日 考核方式 1.评阅 2.答辩 3. 实际操作□ 4.其它□ 指导教师郭亮系(部)主任 注:1、此表一组一表二份,课程设计小组组长一份;任课教师授课时自带一份备查。 2、课程设计结束后与“课程设计小结”、“学生成绩单”一并交院教务存档。
目录 摘要 (3) Abstract (4) 一、概述 (5) 二、直流电机硬件电路设计及描述 (6) 2.1直流电机的结构 (6) 2.2直流电机的工作原理 (6) 2.3电磁关系 (7) 2.4直流电机主要技术参数 (7) 2.5直流电机的类型 (8) 2.6直流电机的特点 (8) 三、直流电机硬件电路设计及描述 (8) 3.1 总体方案设计 (8) 3.1.1 设计思路 (8) 3.1.2设计原理图 (10) 3.2设计原理及其实现方法 (10) 3.2.1速度调节的实现 (10) 3.2.2 转向的控制 (11) 四、流程图 (12) 五、.程序代码(C语言) (13) 六、程序代码(汇编语言) (18) 七、收获、体会和建议 (24) 附录 (25) 1. 本设计所需要芯片以及作用 (25) 2.主要参考文献 (26)
1、 Assigned power rating 。标称功率。或额定功率。只该电机系统设计设计 时的理想功率也是在推荐工作情况下的最大功率。 POWER RATING 为功率。 2、Nominal voltage 。额定电压 (或工作电压,推荐电压。由于一般电机可以工作在不同电压下, 但电压直接和转速有关, 其他参数也相应变化, 所以该电压只是一种建议电压。其他参数也是在这种推荐的电压下给出的。 NOMINAL 名义上的。 3、 No load speed。空转速,或空载转速。单位是 RPM 。 revolutions per minute 此处的 R 不是 RATE 速度的意思,是 REVOLUTION 旋转的意思。空载转速由于没有反向力矩,所以输出功率和堵转情况不一样,该参数只是提供一个电机在规定电压下最大转速的作用。一般外面给出的 6000转啊, 12000转啊,多指这个参数。 4、 Stall torque 堵转转矩。这个是很多要带负载的电机的重要参数。即在电机受反向外力使其停止转动时的力矩。如果电机堵转现象经常出现, 则会损坏电机,或烧坏驱动芯片。所以大家选电机时,这是除转速外要考虑的参数。堵转时间一长,电机温度上升的很快,这个值也会下降的很厉害。 5、 Speed / torque gradient 速度 /转矩斜率。这个参数在一般的电机介绍中很 少出现。如果将转速为 Y 轴,力矩为 X 轴,一般,电机先是有一个和 X 轴平行的线,随后有点像 E 的负指数形式那样下降。即转速和力矩的乘积,随力矩的上升而下降。电机制造商都推荐电机在那条和 X 轴平行的线范围内工作。在这个范围内,电机的电流不至于导致电机过热和烧机。 6、 No load current。空载电流 (或空转电流。前面说过,电流和转矩密切相关。空载电流肯定存在, 其和电压的乘积形成的能量, 主要分为势能和热能消耗。热能就是电机线圈的发热,越好的电机,在空载时,该值越小,而势能指克服摩擦力, 和转子自身惯性的能量还有转子自身的转动势能。而一般转速一定时, 转子的惯性能量增加几乎没有, 而这个势能主要还是克服摩擦力的问题, 而最终以热能形式耗散, 所以空载电流越小, 电机的性能越好, 特别是加上减速箱的电机,空载电流越小,说明减速箱做的越好,当然,减速比越大,同样的设计方式下,阻力越大。
直流电机的介绍 直流电机的特点是他们的多功用性。依靠不同的并励、串励和他励励磁绕组的组合,他们可以被设计为动态的和静态的运转方式从而呈现出宽广范围变化的伏安、-特性或速度-转矩特性。因为它简单的可操纵性,直流系统经常被用于需要大范围发动机转速或精确控制发动机的输出量的场合。 直流电机的总貌如图所示。定子上有凸极,而且由一个或几个励磁线圈励磁。气隙磁通量以磁极中心线为轴线对称分布。这条轴线叫做磁场轴线或直轴。 我们都知道,在每个旋转电枢线圈中产生的交流电压,经由一与电枢联接的旋转的换向器和静止的电刷,在电枢线圈出线端转换成直流电压。换向器-电刷组合构成了一个机械整流器,它形成了一个直流电枢电压和一个被固定在空间中的电枢磁势波形。电刷的位置应使换向线圈也处于磁极中性区,即两磁极之间。这样,电枢磁势波的轴线与磁极轴线相差90度,也就是在交轴上。在示意图中,电刷位于交轴上,因为这是线圈和电刷相连的位置。这样,电枢磁势波的轴线也是沿着电刷轴线的(在实际电机中,电刷的几何位置大约偏移图例中所示位置90度,这是因为元件的末端形状构成图示结果与换向器相连。)。电刷上的电磁转矩和旋转电势与磁通分布的空间波形无关;为了方便我们可以假设在气隙中有一个正弦的磁通密度波形。转矩可以从磁场的观点分析得到。 转矩可以用每个磁极的直轴气隙磁通d φ和电枢磁势波的空间基波分量1a F 相互作用的结果来表示。在交轴上的电刷和这个磁场的夹角为90度,其正弦值等于1,对于一台P 极电机 2 122d P T Fa πφ??= ??? (1-1) 式中带负号被去掉因为转矩的正方向可以由物理的推论测定出来。锯齿电枢磁势波的空间基波是它最大值的28 π。代替上面的等式可以给出: ()2a a a PC T i N m m φπ=? (1-2) 其中:I =电枢外部点路中的电流;
实验一直流并励电动机 一.实验目的 1.掌握用实验方法测取直流并励电动机的工作特性和机械特性。 2.掌握直流并励电动机的调速方法。 二.预习要点 1.什么是直流电动机的工作特性和机械特性? 答:工作特性:当U = U N , R f + r f = C时,η, n ,T分别随P 2 变; 机械特性:当U = U N , R f + r f = C时, n 随 T 变; 2.直流电动机调速原理是什么? 答:由n=(U-IR)/Ceφ可知,转速n和U、I有关,并且可控量只有这两个,我们可以通过调节这两个量来改变转速。即通过人为改变电动机的机械特性而使电动机与负载两条特性的交点随之改变,从而达到调速的目的。 三.实验项目 1.工作特性和机械特性 保持U=UN和If=IfN不变,测取n=f(Ia)及n=f(T2)。 2.调速特性 (1)改变电枢电压调速 保持U=UN、If=IfN=常数,T2=常数,测取n=f(Ua)。 (2)改变励磁电流调速 保持U=UN,T2 =常数,R1 =0,测取n=f(If)。 (3)观察能耗制动过程 四.实验设备及仪器 1.MEL-I系列电机教学实验台的主控制屏。 2.电机导轨及涡流测功机、转矩转速测量(MEL-13)、编码器、转速表。 3.可调直流稳压电源(含直流电压、电流、毫安表) 4.直流电压、毫安、安培表(MEL-06)。
I S :涡流测功机励磁电流调节,位于MEL-13。 (2)测取电动机电枢电流I a 、转速n和转矩T 2 ,共取数据7-8组填入表1-8中 表1-8U=U N=220V I f=I f N=K a=Ω 2.调 速 特 性 (1) 改变 电枢 端电 压的调速 f fN2 (2)改变励磁电流的调速 2= 一7接线 MEL-09) MEL-03中两只900Ω电阻 MEL-05) .直流电动机起动前, 测功机加载旋钮调至零. 实验做完也要将测功机负载钮调到零,否则电机起动时,测功机会受到冲击。 2.负载转矩表和转速表调零.如有零误差,在实验过程中要除去零误差。 3.为安全起动, 将电枢回路电阻调至最大, 励磁回路电阻调至最小。 4.转矩表反应速度缓慢,在实验过程中调节负载要慢。 5.实验过程中按照实验要求, 随时调节电阻, 使有关的物理量保持常量, 保证实验数据的正确性。 七.实验数据及分析
1 引言 直流电机具有优良的调速特性,调速平滑、方便、调速围广,过载能力强,可以实现频繁的无级快速启动、制动和反转,能满足生产过程中自动化系统各种不同的特殊运行要求,因此在工业控制领域,直流电机得到了广泛的应用。 许多半导体公司推出了直流电机专用驱动芯片,但这些芯片多数只适合小功率直流电机,对于大功率直流电机的驱动,其集成芯片价格昂贵。基于此,本文详细分析和探讨了较大功率直流电机驱动电路设计中可能出现的各种问题,有针对性设计和实现了一款基于25D60-24A 的直流电机驱动电路。该电路驱动功率大,抗干扰能力强,具有广泛的应用前景。 2 H 桥功率驱动电路的设计 在直流电机中,可以采用GTR 集电极输出型和射极输出性驱动电路实现电机的驱动,但是它们都属于不可逆变速控制,其电流不能反向,无制动能力,也不能反向驱动,电机只能单方向旋转,因此这种驱动电路受到了很大的限制。对于可逆变速控制, H 桥型互补对称式驱动电路使用最为广泛。可逆驱动允许电流反向,可以实现直流电机的四象限运行,有效实现电机的正、反转控制。而电机速度的控制主要有三种,调节电枢电压、减弱励磁磁通、改变电枢回路电阻。三种方法各有优缺点,改变电枢回路电阻只能实现有级调速,减弱磁通虽然能实现平滑调速,但这种方法的调速围不大,一般都是配合变压调速使用。因此在直流调速系统中,都是以变压调速为主,通过PWM(Pulse Width Mo dulation)信号占空比的调节改变电枢电压的大小,从而实现电机的平滑调速。 2.1 H 桥驱动原理 要控制电机的正反转,需要给电机提供正反向电压,这就需要四路开关去控制电机两个输入端的电压。当开关S1 和S4 闭合时,电流从电机左端流向电机的右端,电机沿一个方向旋转;当开关S2 和S3 闭合时,电流从电机右端流向电机左端,电机沿另一个方向旋转, H 桥驱动原理等效电路图如图1 所示。
一、概述 1.Z2系列小型直流电机为中华人民共和国机械工业部JB1104-68部颁标准所规定的标准系列小型直流电机。 2.Z2系列小型直流电机共分11个机座号,每个机座号有两种铁心长度,制造有直流电动机、直流发电机、直流调压发电机三种,适用于一般正常的工作环境。电动机作一般传动用,发电机作为一般直流电源用,调压发电机作蓄电池组充电用。 3.励磁方式:电动机为带有少量稳定绕组的并激或他激励磁。 发电机为复激或他激励磁(额定电压为230伏的发电机),调压发电机为并激励磁(不带串激绕组)。 电机的他激励磁电压制成有110伏或220伏二种。 电动机额定电压110伏的仅有他励电压110伏一种。 4.Z2系列电机根据使用要求可制成湿热地区使用的具有防潮、防霉、防盐雾性能的湿热带型(T H)直流电机。 5.型号含义:Z表示“直”流,2表示第二次全国定型设计,横线后数字表示机座号与铁心长短,例如Z2-11前一个1代表1号机座,后一个1代表短铁心,而Z2-112中11代表11号机座,2代表长铁心。 二、结构型式 1.直流发电机或直流调压发电机仅制造卧式,机座带底脚的一种。 2.直流电动机可制成下表所示的结构型式。 三、Z2系列电动机 1.电动机可用三角皮带、正齿轮或弹性联轴器进行传动,不使电机轴承受轴向推力。 2.电动机可在正转或逆转情况下正常工作。 四、Z2系列发电机及调压发电机 1.Z2系列发电机及调压发电机的旋转方向自换向器端看去为顺时针方向,根据使用要求亦可制成逆时针方向旋转的发电机或调压发电机。 2.Z2系列发电机及调压发电机根据订货要求可制成与Y系列三相异步电动机配套成的发电机组成套供应。 3.调压发电机的额定功率为平均电压(对110/160伏的为135伏,对220/320伏的为270伏)时的功率,当电压高于平均电压时其输出功率不大于额定功率,当电压低于平均电压时其输出电流不大于额定电流。 五、订货须知 订货时须注明电机的型号及具体规格(包括励磁方式、旋转方向、出线盒位置、是否双轴伸、结构型式等),例如Z2-62 13千瓦220伏1500转/分他激电动机,他励电压220伏,卧式机座带底脚,端盖有凸缘。 配套的异步电动机、变阻器等附件,电刷、刷握等备件的供应,或有特殊要求(如供湿热带地区使用)和须外文说明文件者应在订货合同中注明。
Xxxx大学 本科毕业论文开题报告 基于Simulink的直流电机转速控制仿真研究 学号: xxx 姓名: 导师: 学院: 专业: 日期:
目录 一、选题依据、目的和意义 二、国内外研究现状及发展趋势 三、研究的主要内容及实验方法 四、目标,主要特色及工作进度 五、主要参考文献
一、选题依据、目的和意义 直流电机分为有刷和无刷两种,无刷直流电机(BLDCM)是在有刷直流电动机的基础上发展来的,但它的驱动电流是不折不扣的交流;无刷直流电机又可以分为无刷速率电机和无刷力矩电机。一般地,无刷电机的驱动电流有两种,一种是梯形波(一般是“方波”),另一种是正弦波。有时候把前一种叫直流无刷电机,后一种叫交流伺服电机,确切地讲是交流伺服电动机的一种。 无刷直流电机在重量和体积上要比有刷直流电机小的多,相应的转动惯量可以减少40%—50%左右。由于永磁材料的加工问题,致使无刷直流电机一般的容量都在100kW以下。这种电动机的机械特性和调节特性的线性度好,调速范围广,寿命长,维护方便噪声小,不存在因电刷而引起的一系列问题,所以这种电动机在控制系统中有很大的应用潜力。 1.1选题依据 无刷直流电动机因卓越的性能和不可替代的技术优势倍受人们的关注,特别是自70年代后期以来伴随着永磁材料技术、计算机及控制技术等支撑技术的快速发展及微电机制造工艺水平的不断提高,无刷直流电动机在高性能中、小伺服驱动领域获得广泛应用并日趋占据主导地位。随着无刷直流电机应用领域的不断扩大,要求控制系统设计简易、成本低廉、控制算法合理。建立无刷直流电机控制系统的仿真模型,可以有效的节省控制系统设计时间,及时验证系统的控制算法,同时可以充分利用计算机仿真的优越性,很方便的改变系统的结构,加入不同的扰动和参数变化,可以更好的考察系统在不同结构和不同工况下的静、动特性。因此如何建立无刷直流电机控制系统的仿真模型成为迫切需要解决的关键问题。 1.2目的和意义 无刷直流电动机具有体积小、重量轻、效率高、惯量小和控制精度高、无滑动接触和换相火花、可靠性高、使用寿命长及噪声低等优点,在航空航天、伺服控制、数控机床、机器人、电动汽车、计算机外围设备和家用电器等方面都获得了广泛应用。随着无刷直流电机应用领域的不断扩大,要求控制系统设计简易、成本低廉、控制算法合理、开发周期短。通过建立有效的无刷直流电动机系统仿真模型,可以
对直流电动机调试的几点总结 摘要 长兴电厂#3、#4主油箱直流辅助油泵调试过程中出现重多问题。如:电机接线错误、直流接触器烧坏、电机不能达到额定转速等。文中详细介绍主油箱直流辅助油泵的调试过程以及内容。 关键词 低压厂用直流电动机调试 1概况 长兴电厂二期工程安装两台300MW燃煤机组,每台机组有五台直流电动机,分别为两台小汽机直流油泵、发电机空侧直流密封油泵、发电机氢侧直流密封油泵、主油箱直流辅助油泵,就地控制箱是由浙江湘湖电器设备厂制造的。主油箱直流辅助油泵电机为西安西玛电机厂制造,型号Z2-71,额定功率30kW,额定电压220V,额定电流158.5A,额定转速3000r/min,积复励励磁方式。 直流电动机的控制接线图见图1。控制方式分为DCS控制、就地控制二种,通过就地控制箱的“远方/就地”按钮SO1的位置来实现二种控制方式的选择。当就地控制箱的“远方/就地”按钮SO1在远方位置、开关状态在分闸位置时,DCS满足起动的条件,DCS发出合闸命令,同时DCS巡检保护信号、开关状态、以及运行电流是否正常。在起动过程中,电枢回路内串入限流电阻R1来限制起动电流,起动完成通过K53直流接触器来切除限流电阻R1。 图1 直流电动机控制回路接线图
2调试过程 直流电动机调试包括二次回路调试和电动机本体调试两部分。 2.1二次回路的调试 2.1.1检查接线 对照接线图检查就地控制箱的实际接线是否正确。 2.1.2 测量绝缘电阻 使用500V兆欧表分别测量控制回路、信号回路对地的绝缘电阻,绝缘电阻均不应小于1M 。 2.1.3二次回路通电试验 合上直流配电屏上的电源开关,对就地控制箱送电。在就地控制箱上就地进行分、合闸操作,接触器应能正确动作,确认状态显示正确、保护无异常动作。然后在DCS上进行远方分、合闸操作,接触器应能正确动作,确认开关反馈状态显示正确、联锁逻辑回路正确,确认信号反馈、测量反馈显示正确。 2.2电动机本体试验 2.2.1 检查绕组绝缘电阻 采用500V兆欧表测量绕组的冷态绝缘电阻,并励绕组、串励绕组、电枢绕组(实际上已包含换向绕组)对机壳及其相互间的绝缘电阻应分别进行测量。当电枢绕组与串励绕组或换向绕组在电机内部串联连接且不易解开时,可对串联回路一起进行测量。实测结果不应小于0.5MΩ。 2.2.2检查电机励磁绕组的极性 用感应法检查串励绕组和并励绕组的极性。见图2,将1.5V~6V的干电池经开关接在并励绕组F1、F2上,在串励绕组C1、C2上接一个指针式直流微安表或毫伏表。电池和表计的同极性端接绕组的同极性端。若合上开关瞬间指针顺偏,断开开关瞬间指针反偏,则电动机为积复励(F1、C1同接电源正极或负极);反之,为差复励。
直流减速电机概述与分类的简介 直流减速电机,即齿轮减速电机,是在普通直流电机的基础上,加上配套齿轮减速箱.齿轮减速箱的作用是,提供较低的转速,较大的力矩.同时,齿轮箱不同的减速比可以提供不同的转速和力矩.这大大提高了,直流电机在自动化行业中的使用率. 减速电机是指减速机和电机(马达)的集成体。这种集成体通常也可称为齿轮马达或齿轮电机。通常由专业的减速机生产厂进行集成组装好后成套供货。减速电机广泛应用于钢铁行业、机械行业等。使用减速电机的优点是简化设计、节省空间。 减速电机概述 1、减速电机结合国际技术要求制造,具有很高的科技含量。 2、节省空间,可靠耐用,承受过载能力高,功率可达95KW以上。 3、能耗低,性能优越,减速机效率高达95%以上。 4、振动小,噪音低,节能高,选用优质段钢材料,钢性铸铁箱体,齿轮表面经过高频热处理。 5、经过精密加工,确保定位精度,这一切构成了齿轮传动总成的齿轮减速电机配置了各类电机,形成了机电一体化,完全保证了产品使用质量特征。 6、产品才用了系列化、模块化的设计思想,有广泛的适应性,本系列产品有极其多的电机组合、安装位置和结构方案,可按实际需要选择任意转速和各种结构形式。 减速电机分类 1、大功率齿轮减速电机 2、同轴式斜齿轮减速电机 3、平行轴斜齿轮减速电机 4、螺旋锥齿轮减速电机 5、YCJ系列齿轮减速电机 减速电机广泛应用于冶金、矿山、起重、运输、水泥、建筑、化工、纺织、印染、制药等各种通用机械设备的减速传动机构。 直流减速电机,即齿轮减速电机,是在普通直流电机的基础上,加上配套齿轮减速箱.齿轮减速箱的作用是,提供较低的转速,较大的力矩.同时,齿轮箱不同的减速比可以提供不同的转速和力矩.这大大提高了,直流电机在自动化行业中的使用率.减速电机是指减速机和电机(马达)的集成体。这种集成体通常也可称为齿轮马达或齿轮电机。通常由专业的减速机生产厂进行集成组装好后成套供货。减速电机广泛应用于钢铁行业、机械行业等。使用减速电机的优点是简化设计、节省空间。减速电机概述1、减速电机结合国际技术要求制造,具有很高的科技含量。2、节省空间,可靠耐用,承受过载能力高,功率可达95KW以上。3、能耗低,性能优越,减速机效率高达95%以上。4、振动小,噪音低,节能高,选用优质段钢材料,钢性铸铁箱体,齿轮表面经过高频热处理。5、经过精密加工,确保定位精度,这一切构成了齿轮传动总成的齿轮减速电机配置了各类电机,形成了机
一、设计题目 硬件35——直流电动机控制设计 要求:1)可控制启动、停止;2)根据给定转速和检测的转速,采用PWM 脉宽调制控制转速,产生不同的占空比的脉冲控制电机转速;3)实现由慢到快,再由快到慢的变速控制;4)数码管显示运行状态。扩展功能:实现定时启动,定时停止 二、开发目的 通过本项课程设计,对计算机硬件课程中涉及的芯片结构、控制原理、硬件编程等方面有一定的感性认识和实践操作能力,更好的理解计算机硬件课程中讲述的基本原理和概念。 通过使用proteus的汇编程序,来实现占空比可调的方波发生器。学习并掌握了8086/8088汇编语言编程方法,掌握了8255、8253、ADC0808、74LS154译码器、74LS273锁存器等芯片的基本结构和工作原理,掌握了芯片编程控制的方法。 三、小组成员分工及成果 蒲艺文:编写程序,流程图绘制。 陈兴睿:构思草图,后期调试。 肖钦翔:绘制PROTEUS电路图,资料收集。 成果:绘制完成电路图,灌入程序,调试,完成直流电动机控制设计。 四、设计方案以及论证 原理:8086与两个74273和一个74154组成地址锁存及译码电路。 8255和8253作为译码选择端IO1和IO2,地址分别为0200h和0400h(由译码电路可得到) A1,A2是作为8253的三个计数器和控制器的地址(01对应计数器1,11对应控制器)。 A1,A2也作为8255的A,B,C三组端口和其控制器的地址(00对应A,11对应控制器) 一,选择8255(使能端IO1)控制器,写入控制字10011000b 二,通过C口依次输出00000000b,00001000b,00000000b来启动ADC0808。三,等待ADC0808转换,并通过C口测试EOC端口是否为高电平。 四,eoc为高电平,则通过A口接受转换后的电压数据AL(范围从0-ffh)。五,选择8253(使能端IO2)控制器,写入控制字01010010b 六,选择8253计数器1,写入初始值为电压数据AL。 七,选择8253控制器,写入控制字00010100b。 八,选择8253计数器0,写入初值255,计数器0即开始工作,到0时输出负脉冲,经过反相器变为正脉冲,作为计数器1的GATE门控信号输入,来控制
通常情况下,1KW以上的电机我们会称它为大功率无刷直流电机。无刷电机在大功率、高转速的条件下,其优越性更加明显,但对电机控制器要求会比较高。 它的原理是很多人想要知道的,以BLDC80无刷直流电机为例来说吧,此款电机额定转速15000rpm,额定功率1300W,过载能力3倍,而驱动部分按1KW设计,电源为三相220V/50HZ,驱动方式为直流PWM,这样电机的可靠性更高,控制简单,控制特性更好,无刷直流电机控制器是根据霍尔效应制作的一种磁场控制器,其安装在电机的内部,是一种开关型器件。 大功率无刷直流电机控制器输入的信号经过阻容低通滤波后再输入到单片机中,以免杂波的干扰影响单片机的判断。 这款大功率无刷直流电机主要可以应用在智能家厨、工业设备、医疗设备等领域。其中家电设备的应用最为广泛,主要应用的产品是料理机、破壁机,此款无刷直流电机是含控制器一体化的产品,可根据性能和应用要求设计电机和控制器的方案。 随着市场的需求,无刷直流电机的技术优势越来越显著,近些年大功率无刷直流电机已经迅速的得到了推广与应用,无刷直流电机控制器的技术也得到了一
定的提升。无刷直流电机选型时需参考的主要参数有以下几点:最大扭矩:可以通过将负载扭矩、转动惯量和摩擦力相加得到,另外,还有一些额外的因素影响最大扭矩如气隙空气的阻力等。 平方模扭矩:可以近似的认为是实际应用需要的持续输出扭矩,由许多因素决定:最大扭矩、负载扭矩、转动惯量、加速、减速及运行时间等。 转速:这是有应用需求的转速,可以根据电机的转速梯形曲线来确定电机的转速需求,通常计算时要留有10%的余量。 江苏惠斯通机电科技有限公司具有完备售后服务队伍,为用户提供最佳的服务,并且取得了16949认证,是一家专业生产防爆控制电机,伺服电机,直流无刷电机的厂家,是中国航天防爆伺服制定供应商,是军工行业受欢迎品牌,其产品性价比远远高于国外品牌的同类电机。
基于Matlab的直流电机速度控制
系统仿真 课程设计报告 设计题目:基于Matlab的直流电机速度控制 专业:自动化 学生姓名: 班级学号: 指导教师: 开课日期2013年 7 月 1 日至2013年 7 月 13 日南京邮电大学自动化学院
一、课程设计题目 控制系统的执行机构常用直流电机来驱动,电路和原理示意图如下所示 其开环传递函 数 为 ()()0001 .0)15.0)(1.001.0(01 .02+++= +++= s s K R Ls b Js K V θ ,请用时域分析方法设计PID 控制器,使系统满足下列性能指标要求:当仿真输入是单位阶跃信号时,电机输出转速调整时间小于2秒,超调小于5%,稳态误差小于1%。 要求给出详细的设计步骤,matlab 源码及仿真曲线。 二、实验原理 本报告首先介绍了直流电动机的物理模型,并测量计算了它的具体参数。然后根据牛顿第二定律和回路电压法分别列写运动平衡方程式和电机电枢回路方程式,从而通过一些数学变换抽象出了以电压为输入、转速为输出、电流和转速为状态变量的数学模型。借助MATLAB 设计simulink 模块调整PID 模块的各项系数,使系统的阶跃响应达到了设计指标。 1、建立该系统的时域数学模型 由克希霍夫定律得: V=R*i+L +e 直流电机转矩和电枢电流关系为 T=Kt*I 电枢旋转产生反电动势与旋转运动角速度的关系为 e=
由牛顿定律,转子力矩平衡关系为 其中,T:负载转矩,:负载电流 V(s)=R*I(s)+L*sI(s)+E(s) 拉式变换:E=Ke(s) 划去中间变量得: 开环传递函数为: 2、PID控制器的功能 比例环节:Kp增大等价于系统的开环增益增加,会引起系统响应速度加快,稳态误差减少,超调量增加。当Kp过大时,会使闭环系 统不稳定; 积分环节:相当于增加系统积分环节个数,主要作用是消除系统的稳态误差。积分环节作用的强弱取决于积分时间常数Ti,Ti增大, 系统超调量变小,响应速度变慢; 微分环节:主要作用是提高系统的响应速度,同时减少系统超调量,抵消系统惯性环节的相位滞后不良作用,使系统稳定性明显改善。 Td偏大或偏小,都会使超调量增大,调整时间加长。由于该环节所产 生的控制量与信号变化速率有关,故对于信号无变化或变化缓慢的系 统微分环节不起作用。 三、设计步骤 方法1: 搭建simulink模块,利用经验调节法整定PID参数,使整个系统满足调节时间小于2秒,超调小于5%,稳态误差小于1%。 1、搭建的simulink模块图如下:
直流电机相关的问题汇总 问:直流电机原理是什么 答:直流电机有定子和转子两大部分组成,定子上有磁极(绕组式或永磁式),转子有绕组,通电后,转子上也形成磁场(磁极),定子和转子的磁极之间有一个夹角,在定转子磁场(N 极和S极之间)的相互吸引下,是电机旋转。改变电刷的位子,就可以改变定转子磁极夹角(假设以定子的磁极为夹角起始边,转子的磁极为另一边,由转子的磁极指向定子的磁极的方向就是电机的旋转方向)的方向,从而改变电机的旋转方向. 直流励磁的磁路在电工设备中的应用,除了直流电磁铁(直流继电器、直流接触器等)外,最重要的就是应用在直流旋转电机中。在发电厂里,同步发电机的励磁机、蓄电池的充电机等,都是直流发电机;锅炉给粉机的原动机是直流电动机。此外,在许多工业部门,例如大型轧钢设备、大型精密机床、矿井卷扬机、市内电车、电缆设备要求严格线速度一致的地方等,通常都采用直流电动机作为原动机来拖动工作机械的。直流发电机通常是作为直流电源,向负载输出电能;直流电动机则是作为原动机带动各种生产机械工作,向负载输出机械能。在控制系统中,直流电机还有其它的用途,例如测速电机、伺服电机等。虽然直流发电机和直流电动机的用途各不同,但是它们的结构基本上一样,都是利用电和磁的相互作用来实现机械能与电能的相互转换。直流电机的最大弱点就是有电流的换向问题,消耗有色金属较多,成
本高,运行中的维护检修也比较麻烦。因此,电机制造业中正在努力改善交流电动机的调速性能,并且大量代替直流电动机。不过,近年来在利用可控硅整流装置代替直流发电机方面,已经取得了很大进展。包括直流电机在内的一切旋转电机,实际上都是依据我们所知道的两条基本原则制造的。一条是:导线切割磁通产生感应电动势;另一条是:载流导体在磁场中受到电磁力的作用。因此,从结构上来看,任何电机都包括磁场部分和电路部分。从上述原理可见,任何电机都体现着电和磁的相互作用,是电、磁这两个矛盾着的对立面的统一。我们在这一章里讨论直流电机的结构和工作原理,就是讨论直流电机中的“磁”和“电”如何相互作用,相互制约,以及体现两者之间相互关系的物理量和现象(电枢电动势、电磁转矩、电磁功率、电枢反应等)。《一》直流发电机的基本工作原理直流发电机和直流电动机具有相同的结构,只是直流发电机是由原动机(一般是交流电动机)拖动旋转而发电。可见,它是把机械能变为电能的设备。直流电动机则接在直流电源上,拖动各种工作机械(机床、泵、电车、电缆设备等)工作,它是把电能变为机械能的设备。但是,当前已经有可控硅整流装置替代了直流发电机,为了能使大家更好的理解直流电动机,有必要同时讲述一下直流发电机的原理。我们首先来观察直流发电机是怎样工作的。如图1所示,电刷A、B分别与两个半园环接触,这时A、B两电刷之间输出的是直流电。我们再来看看这时线圈在磁极之间运动的情况。从图1(a)可以看出,当线圈的ab边在N极范围内按逆时针方向运动时,应用发电机右手定则,这时所产生的电动势是从b指向a。这时线圈的cd边则是在S极范围内按逆时针方向运动,依据发电机右手定则可以判断,cd边中的感应电动势方向是从d 指向c。从整个线圈来看,感应电动势的方向是d-c-b-a。因此,和线圈a端连接的铜片1和电刷A是处于正电位;而和线圈的d端连接的铜片2和电刷B是处于负电位。如果接通外电路,那么电流就从电刷A经负载流入电刷B,与线圈一起构成闭合的电流通路。当线圈的ab边转到S极范围内时,cd边就转到N极范围内(图1,b),用右手定则判断可以知道,这时线圈cd边中产生的电动势方向是从c到d,而ab边转到了S极范围内,其中电动势的方向则是有a到b。由于电刷在空间是不动的,因此和线圈d端连接的铜片2和电刷A接触,它的电位仍然是正。而与线圈a端连接的铜片1则和电刷B接触,它的电位仍然是负。接通外电路时,电流仍然是从电刷A经负载流入电刷B,与线圈一起构成闭合的电流通路。不过,要注意到这时线圈内的电流已经反向了。由此可知,当线圈不停地旋转时,虽然与两个电刷接触的线圈边不停的变化,但是,电刷A始终是正电位,电刷B始终是负电位。因此,有两电刷引出的是具有恒定方向的电动势,负载上得到的是恒定方向的电压和电流。也就是说,
F…复臻芝憩咖…………………………………….苎壁蔓型…2…010芝帮曼~i状态方程描述的大功率多相无刷直流电动机 田天,赖延辉,李槐树 (海军工程大学,湖北武汉430033) 摘要:用永磁体磁链变化率矩阵来计算反电势,改善了因用梯形波代替反电势波形带来的误差,通过建立一台30kW六相无刷直流电动机的数学模型,用Matlab语言编制状态方程仿真程序,准确地对电机空载特性及突加 负载等动态过程进行性能仿真,仿真结果与有限元及实验结果相吻合,从而验证了该方法的有效性。 关键词:多相无刷直流电动机;状态方程;仿真;Matlab 中图分类号:TM33文献标识码:A文章编号:1004-7018(2010)03-0008-03 SimulationofHighPowerMulti—PhaseBLDCMswithStateVariableModel mNTian.LAIYan—hui.LIHuai—shu (NavalUniversityofEngineering,Wuhan430033,China) Abstract:Simulinkhasbeenwidelyusedinmodelingandsimulationofdynamicalsysteminrecentyears,butformulti-phaseBLDCMs.thereisnoready—mademodeltou∞.ThechangerateofPMlinkagewasusedtocalculatethebackEMF tomelioratetheerrorcausedbythesubstitutionoftrapezoidalwaveforthebackEMFwave.Themathematicalmodelofa30 kWsix-phaseBLDCMWasestablishedandthestatevariablesimulationwasprogrammedbyMaflablanguage.sothedynam- iecoursesuchasno-loadcharacteristicandpop-inloadWassimulatedaccurately.Thecomparisonoftheresultsderivedfromthefiniteelementandtheexperimentshowsthatpmposodmethodiseffective. Keywords:multi-phaseBLDCM;statevariablemodel;simulation;Matlab 0引言1多相无刷直流电动机数学模型 现阶段的无刷直流电动机多为三相且功率较小,限制了其应用范围。与三相电机相比,多相无刷电动机不仅可以改善性能,还能提高系统的功率容量和可靠性。对于动态性能及可靠性要求较高的场合,可采用30kW六相无刷直流电动机。大功率无刷直流电动机由于其绕组参数较小,因而调速控制难度大,性能仿真是研究其动态特性的有效途径,也可为调速控制提供依据。 在以往的无刷直流电动机的众多仿真研究文献中【l刁1,对于电机的建模与仿真一般都采用Simulink中现有的模块搭建来完成,而且通常采用梯形波代替反电势波形,给仿真和计算带来误差。然而对于多相无刷直流电动机,目前没有现成的模块可供调用,本文用永磁体磁链变化率矩阵来计算反电势,在此基础上建立了一台30kW六相无刷直流电动机的数学模型,依据状态方程法用Matlab语言编制程序对该电机进行仿真,不仅改善了因用梯形波代替反电势波形带来的误差,也方便了电机参数以及负载变化的修改,整个仿真过程清晰直观。 收稿日期:2009—1l—07 基金项目:国家自然科学基金委创新研究群体科研项目(50421703) 81.1电压方程 该电机为转子表面瓦片式磁钢结构,定子绕组为两个独立三相双层整距分布,双Y移30。相带。分析中认为永磁体不起阻尼作用,忽略饱和、磁滞和涡流的影响。 由电机学可知,无刷直流电动机定子六相绕组电压方程可表示为: u=r,+£警+警(1)将永磁体等效为励磁绕组,砂,为永磁体对定子各相绕组产生的磁链,警表示磁链对时间的变化率,它在实际计算中并不方便求取,而实际计算中砂,是依据转子位置角来求取的,它是转子位置角0的函数,因此可以将其转换为对转子位置角的变化率,即: 垫dt=丝?面A000=塑00?∞(2) m……7式中:等即为永磁体磁链对转子位置角的变化率,简称为磁链变化率矩阵: oq,f妒f(0+AO)一吵f(0)一=:一 a口△日 (3) 万方数据
如何用PWM 调速开关控制电机使禁能、正反转及限位? 电机作为各种机械的动力来源。用途众多,应用广泛。大至重型工业,小至小型玩具都有其踪迹。在日常使用中需要对电机的正反转、正反转限位,可以说电机在广泛使应用于各大行业。例如行车、木工用的电刨床、台钻、刻丝机、甩干机、车床等。本文以直流电机驱动器驱动直流电机为例,讲述如何用PWM 调速开关控制方式控制直流电机控制电机使禁能、正反转及限位。 PWM 调速开关控制方式控制电机,广泛应用于玩具、小车、机器人等项目,通过串口预设正反转速度,可以灵活控制小车等电机正反转速度,用两个限位开关控制电机的正反转限位,控制方式简便、安全可靠,方便维护。 开关控制方式适合于电位器/模拟信号控制方式下PWM 调速方式和预设正反转速度方式(且触发方式配置为电平)。如果无需调速,正反转速度均为全速,可配置为电位器/模拟信号PWM 调速方式;如果需要指定正反转速度(可为占空比、转矩或转速),应配置为预设正反转速度方式且触发方式配置为电平方式。如何配置调速方式表 1,如何预设速度及配置触发方式见MODBUS-RTU(国标GB/T19582-2008)通讯协议。 调速方式配置为电位器/模拟信号PWM 调速时,接线方法如图 1所示。图中K1和K2为单刀双掷开关。K1控制方向,K1拨向RV 端(AI2与RV 相连)时,电机正转,拨向COM 端时,电机反转;K2控制启动和停止,K2拨向RV 端(AI1与RV 相连)时启动,拨向COM 端时停止。如果使用蓄电池给驱动器供电,建议在电源接口串联一只保险丝。 K1反转限位开关正转限位开关 M 电机 电源 9-24V 保险丝K2 启动/ 图 1预设速度开关控制方式接线示意图 表 1 电位器/模拟信号控制方式下调速方式配置表