基于随机集理论的多个声目标融合跟踪
- 格式:pdf
- 大小:402.17 KB
- 文档页数:5
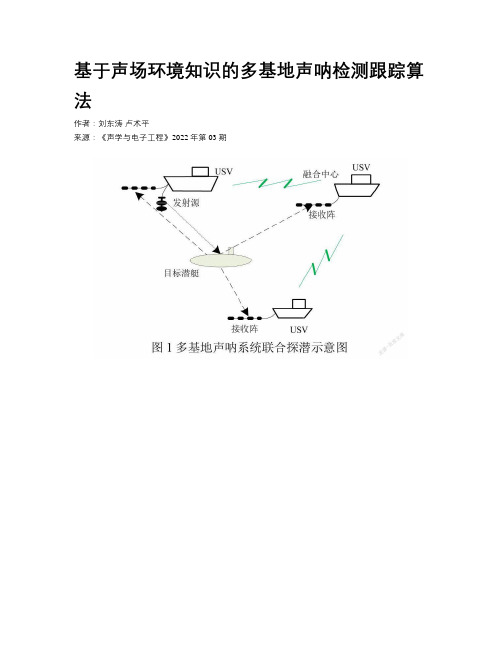
基于声场环境知识的多基地声呐检测跟踪算法作者:刘东涛卢术平来源:《声学与电子工程》2022年第03期摘要针对复杂水声环境下多基地声呐系统联合水下多目标检测跟踪问题,提出了基于声场环境知识的多基地声呐检测跟踪算法。
该算法在多传感器集中式融合框架下,利用海洋声场环境分析设备提供的辅助知识,自适应调整多基地声呐系统联合目标检测准则和多目标跟踪策略。
仿真结果表明,相比多基地声呐系统非知识辅助方法,该算法能够有效降低浅海混响区的目标跟踪虚假航迹率。
关键词多基地声呐;检测跟踪;声场环境;知识辅助主动多基地声呐系统通常由多个声源和多个接收阵组成,能够对水下目标进行协同探测,收一发多节点提供了多角度目标测量数据,有效提升了水下目标的探测性能[1-3]。
相较于传统单节点声呐系统,更高的数据率也带来了更多的虚假目标。
尤其是在浅海环境中,存在大量强混响区和强离散干扰,比如海底山、海底管道、礁石等,导致多基地声呐在协同跟踪处理后出现很多虚假目标航迹[4、5]。
针对主动声呐探测时浅海混响区虚假目标航迹多的问题,当前的解决思路主要有以下几种:一是在检测前抑制混响,2017年郝程鹏等提出了基于空时自适应处理的移动平台主动声呐混响抑制算法[6];二是选择适配的检测算法,2020年卢术平等提出了复杂非均匀背景下的鲁棒声呐恒虚警检测算法,该方法基于背景的统计分析,选择适配的恒虚警检测器,能够有效抑制混响边缘处干扰点迹[7];三是跟踪过程中,通过航迹管理等方式删除虚假目标航迹[8]。
雖然针对混响区主动声呐跟踪虚假航迹过多问题已有一定研究,但面向多基地声呐协同探测方面的研究还很少。
本文在集中式多基地声呐架构的基础上[9,10],提出一种基于声场环境知识的多基地声呐检测跟踪算法。
S Haykin在2006年首次提出了认知雷达[11],随后该想法也被引入声呐领域[12,13]。
认知声呐能够与环境(包括目标)进行智能交互,通过利用目标特性和先验的海洋环境知识,不断地调整参数和操作策略[14]。
随机有限集扩展目标跟踪算法研究随机有限集扩展目标跟踪算法研究摘要:目标跟踪是计算机视觉和机器人领域的研究热点之一。
随机有限集(Random Finite Set,RFS)扩展目标跟踪算法是一类基于概率和统计的目标跟踪方法。
本文通过研究RFS扩展目标跟踪算法的基本理论和关键技术,总结了该算法的发展历程和应用情况,并对其未来发展进行了展望。
1. 引言目标跟踪是计算机视觉和机器人领域的重要课题,广泛应用于目标检测、自动驾驶、智能监控等领域。
传统的目标跟踪算法主要基于滤波或粒子滤波方法,其在处理高维状态空间和多目标的情况下存在一定的局限性。
为了克服这些问题,研究人员提出了随机有限集扩展目标跟踪算法。
2. 随机有限集扩展目标跟踪算法概述RFS扩展目标跟踪算法是一类基于RFS理论的目标跟踪方法,该方法通过描述目标状态的概率密度函数来进行目标跟踪。
RFS概率密度函数描述了目标的存在概率以及目标的状态分布,能够更准确地表示目标的不确定性。
3. RFS扩展目标跟踪算法的基本理论RFS扩展目标跟踪算法的核心理论包括卡尔曼滤波器、粒子滤波器、卡尔曼-粒子滤波器等。
卡尔曼滤波器是一种基于线性状态空间模型的目标跟踪方法,其通过线性近似的方式估计目标状态。
粒子滤波器是一种基于重采样的蒙特卡洛方法,能够处理非线性和非高斯的目标模型。
卡尔曼-粒子滤波器是卡尔曼滤波器和粒子滤波器的结合,用于解决高维状态空间和多目标的跟踪问题。
4. RFS扩展目标跟踪算法的关键技术RFS扩展目标跟踪算法的关键技术包括目标测量、目标建模、数据关联和滤波更新等。
目标测量用于从视频序列中提取目标特征,如位置、速度、外观等。
目标建模用于描述目标的运动模型和外观模型,常见的建模方法包括卡尔曼滤波器、高斯混合模型等。
数据关联用于将每个测量与目标进行关联,常见的关联方法有最小二乘关联、相似度度量等。
滤波更新用于根据最新的目标测量信息更新目标的状态估计值和不确定度。
phd多目标跟踪原理
PHD(概率假设密度)多目标跟踪是一种有效的多目标跟踪方法,其基本原理是通过概率假设密度滤波对多目标进行跟踪。
PHD滤波器利用一阶统计矩近似方法对多目标后验概率密度函数求集合积分运算,得到多目标强度即PHD。
PHD方法计算的是多目标联合分布的一阶矩,即将集合积分运算简化为单个变量的积分运算,因此具备了实际运算的可行性。
由于PHD方法属于随机集框架的范畴,所以它也具备随机集方法的优点,即可以避免数据关联过程。
在多目标跟踪过程中,PHD滤波器避免了数据关联的问题,在去除杂波的同时能够实现对目标的联合检测和跟踪。
它适用于关联过程比较复杂的非传统意义下的多目标追踪问题,比如群目标追踪,在密集目标或者杂波背景下对所感兴趣的目标进行检测和跟踪等。
PHD在给定状态空间区域S上的积分是区域S内目标个数的期望值,而PHD的峰值点所对应的状态点可认为是目标状态的估计值。
近些年来,对PHD多目标跟踪算法的研究逐步成为该领域中的一个热点。
本论文针对基于粒子滤波的PHD多目标跟踪方法进行研究,以包含多个目标的模拟仿真和真实红外图像作为主要研究对象,介绍了粒子滤波算法和概
率假设密度滤波算法的理论基础,将这两种方法结合起来应用于红外序列图像的多目标跟踪问题,并对方法的应用进行了实验仿真和分析。
以上内容仅供参考,如需了解PHD多目标跟踪原理的更多信息,建议查阅机器视觉和人工智能相关学术文献或研究资料。



基于条件随机场的目标跟踪的研究的开题报告一、研究背景目标跟踪是计算机视觉领域中的一个重要研究方向,是对于视频序列中目标的识别、追踪和重建的过程。
随着计算机硬件性能的提升和深度学习技术的应用,目标跟踪技术在实际应用中得到了广泛的应用,如视频监控、自动驾驶、虚拟现实等。
基于条件随机场的目标跟踪是近年来应用较为广泛的目标跟踪方法之一。
条件随机场(Conditional Random Fields,CRF)是一种用于序列标记问题的无向图模型,其主要特点是利用局部特征建模全局特征,能够准确地对器件序列进行建模,具有一定的优越性。
二、研究目的及意义本研究的主要目的是探究基于条件随机场的目标跟踪方法,通过建立目标跟踪的模型,提高目标跟踪的准确性和稳定性。
同时,本研究还将探讨基于条件随机场的目标跟踪方法在实际应用中的效果和优缺点,为目标跟踪技术的实际应用提供指导和支持。
三、研究内容和方法主要内容:1.对基于条件随机场的目标跟踪方法的原理进行深入分析和探究,重点研究基于CRF的目标跟踪模型的构建方法以及模型参数的选择。
2.通过对基于条件随机场的目标跟踪方法进行实验研究,以模拟实际场景中目标跟踪的情况,评估该方法的准确性和鲁棒性,并与其他目标跟踪方法进行比较。
研究方法:1.理论分析法:梳理目标跟踪领域的相关理论和研究成果,对基于条件随机场的目标跟踪方法进行深入分析和探究。
2.实验验证法:通过在目标跟踪领域的标准数据集上进行实验,验证基于条件随机场的目标跟踪方法的准确性和鲁棒性,并与其他目标跟踪方法进行比较。
四、预期结果本研究的预期结果是:1.分析和探究基于条件随机场的目标跟踪方法的原理和特点,包括方法的优点和不足之处,为方法的进一步优化提供指导。
2.基于目标跟踪领域的标准数据集进行实验,验证基于条件随机场的目标跟踪方法的准确性和鲁棒性,同时与其他目标跟踪方法进行比较。
3.探索基于条件随机场的目标跟踪方法的应用前景,并为目标跟踪技术的实际应用提供支持和指导。

多目标跟踪算法先来回顾下卡尔曼滤波器:假定k k x |表示当前k 时刻目标的状态,k 1k x |+表示下一个时刻目标的状态,k z 则表示k 时刻的实际观测。
一般地模型都假定为线性的:这里的1k x +为k+1时刻目标的状态,k x 为k 时刻的状态,为状态转移矩阵,而是服从均值为0方差为的正态分布,表示由噪声等引起的干扰。
卡尔曼滤波采取初步估计:这里的估计只是初步的估计,状态估计与实际状态的误差矩阵等于状态1k x +的的方差,即:更新(修正):这里已知了实际观察,同样是假定观测与状态的似然关系是线性的,即满足:服从一个均值为0方差为的正态分布。
卡尔曼滤波器给出了经过更新后得到的比较合理的k+1时刻的估计为:相应地得到了更新后方差的估计:这里:其实这些都是通过最小二乘法推出来的,即使得误差:最小,而初步估计也是通过最小二乘法获得,即使得:最小。
有了上述估计方程后,便可以获得一个估计流程:下面再介绍下贝叶斯公式 先看一个定义 马氏链:设{} ,,,k j i E =为有限集或可列集,称()0n n X ≥为定义在概率空间()P F,,Ω上,取值于空间E 的马氏链,如果满足下面的马氏性:对一切n 10i i i ,,, 有[][]1n 1n n n 1n 1n 00n n i X i X P i X i X i X P ----======|,,|若左边的条件概率有定义,则称[]i X j X P 1n n ==-|为在n-1时刻状态为i,在n 时刻在j 的转移概率函数,若它与n 无关,则记为ij p ,并称为时齐的或齐次的。
显然这里的马氏性接近于独立性,在一定程度上可以称为无记忆性或无后效性。
下面我们来推导贝叶斯公式: 容易由条件概率公式定义知而()()()()()()()()()()()()()()()()()()1k 1k 1k k k 1k k1k k k 1k k 1k k k 1k k k kk 1k 1k 1k k k 1k k k k k 1k 1k 1k kk 1k 1k 1k k k 1k 1k 1k 1k 1k z x f dxx f x zfx f x z f z f dx x f x z f x z f z f x f x z f x z f dx z x f x z f z x f x z f x f +++++++++++++++++++++++==⋅==⎰⎰⎰|||||||||||||||||||||||||就得到了更新后的公式如下:这里记于是就可以得到贝叶斯滤波器跟踪流程如下:实际上可以证明,卡尔曼滤波器是贝叶斯滤波器的一种特殊形式,由于假定噪声服从正态分布,同样地观测与状态估计的误差也是服从正态分布,那么不难得:那么:这里由模型假设可知,似然分布为一个正态分布,即:又由前面可得那么:从而得到更新公式:这里:实际上卡尔曼估计是一个最优估计:那么不难由正态分布的性质得:高斯混合滤波以卡尔曼滤波器为代表,这类滤波器都是假定概率分布为正态分布,并且模型是线性的,故而在实际应用中有较大局限性。

机载雷达目标跟踪与航迹信息提取兰天;程继红【摘要】针对机动目标跟踪中航迹信息提取精度不高的问题,提出一种ECEF坐标系下基于交互多模型的多机协同跟踪算法。
首先,各载机以ECEF坐标系为融合中心对目标量测进行无偏转换处理,以有效减小量测转换误差对目标跟踪的影响;然后,利用交互多模型的方法对目标进行融合跟踪,以进一步提高目标机动时的跟踪精度;最后,通过二次滤波的方法,来有效实现目标航迹信息的精确提取。
仿真结果表明,该算法可较好地提高目标机动时的跟踪精度和航迹信息提取精度。
%To improve the track information extraction precision of maneuvering target, a multi-plane cooperative tracking algorithm was proposed based on IMM in the ECEF coordinate. For this method, unbiased transformation was used to re-duced the influence of measurement errors in the ECEF coordinate firstly. Then the IMM was further used to improve the maneuvering target tracking precision. Finally, track information extraction precision was effectively improved by using the second filter. Simulation results showed that target tracking and track information extraction could be finished effectively by using the proposed method.【期刊名称】《海军航空工程学院学报》【年(卷),期】2014(000)003【总页数】5页(P264-268)【关键词】航迹信息提取;交互多模型;机动目标跟踪【作者】兰天;程继红【作者单位】海军装备部西安军事代表局,太原030006;海军航空工程学院科研部,山东烟台264001【正文语种】中文【中图分类】TN958.93机载雷达航迹信息提取是当前信息化综合作战、传感器组网作战和多平台一体化联合作战的重要研究课题[1]。

![一种基于多扬声器和多麦克风声波多目标追踪方法[发明专利]](https://img.taocdn.com/s1/m/1902bca0dbef5ef7ba0d4a7302768e9950e76e74.png)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 202011085184.8(22)申请日 2020.10.12(71)申请人 中国海洋大学地址 266100 山东省青岛市崂山区松岭路238号(72)发明人 刘超 王鹏皓 蒋若冰 (74)专利代理机构 青岛华慧泽专利代理事务所(普通合伙) 37247代理人 赵梅(51)Int.Cl.G01S 5/18(2006.01)G01S 15/66(2006.01)(54)发明名称一种基于多扬声器和多麦克风声波多目标追踪方法(57)摘要本发明属于多目标识别与追踪技术领域,具体公开了一种基于多扬声器和多麦克风声波多目标追踪方法,包括以下步骤:设计一类自相关强互相关弱声波信号并通过扬声器发送;识别直射信号和来自若干个目标的反射信号,获得直射信号的到达时间和反射信号的到达时间,并利用反射信号的飞行时间计算反射信号的传播路径长度;以对应麦克风和扬声器为焦点,结合来自目标的反射信号传播路径长度绘制椭圆,并利用多个椭圆的交点来确定多个目标的位置。
本发明不受环境、设备自身状况等因素的影响,具有良好的可移植性,弥补了电子设备现有目标追踪方案的不足。
权利要求书2页 说明书7页 附图4页CN 112327252 A 2021.02.05C N 112327252A1.一种基于多扬声器和多麦克风声波多目标追踪方法,其特征在于,包括以下步骤:S1、设计一类自相关强互相关弱声波信号并通过扬声器发送;S2、识别直射信号和来自若干个目标的反射信号,获得直射信号的到达时间和反射信号的到达时间,并利用反射信号的飞行时间计算反射信号的传播路径长度;S3、以对应麦克风和扬声器为焦点,结合来自目标的反射信号传播路径长度绘制椭圆,并利用多个椭圆的交点来确定多个目标的位置。
2.根据权利要求1所述的一种基于多扬声器和多麦克风声波多目标追踪方法,其特征在于,S1中,使用若干个扬声器和若干个麦克风,包括多个扬声器和多个麦克风、或一个扬声器和多个麦克风、或多个扬声器和一个麦克风;声波信号是人耳无法听见或察觉的频率为18kHz及以上的信号。

随机集概述1 引言随机集理论(Random Sets Theory, RST)主要是指有限集统计(FISST)理论,需要较为复杂的数学基础,如集合论、逻辑代数、测度论、拓扑学和泛函分析等。
该理论能够解决复杂环境下信息融合、多目标跟踪的各种问题,是目前信息融合和多目标跟踪研究领域最受关注的方向之一。
利用随机集理论,可以将多目标问题中的探测、跟踪、属性识别等问题统一起来,并能解决多目标状态的后验估计、多目标信息融合算法的性能评估等棘手问题。
20世纪70年代,随机集理论最早由D.G.Kendall和G.Matheron分别基于统计几何的思想各自独立提出的。
G. Matheron在研究的过程中丰富了随机集理论。
随后,Mahler于1994年系统地提出了随机集理论的一种特例即有限集合统计学理论,该理论在信息融合和多目标跟踪领域中的应用经历了三个发展阶段:(1)研究起步阶段(1994—1996年)该阶段的研究主要集中在多传感器多目标跟踪问题利用随机集理论的数学描述。
Mahler 将一些单传感器和单目标的概念“直接”推广到多传感器多目标系统。
利用Bayes方法、随机集统计学理论对多传感器多目标状态估计问题进行了重新描述,并证明Dempster-Shafer 理论、模糊逻辑、基于准则的推理都是规范Bayes建模方法的推论。
(2)研究发展阶段(1997—1999年)这段时期,Mahler等人在前期研究基础上完善了多目标系统规范Bayes方法的有关内容,更着力设计一种更为系统和实际的不确定信息处理和融合方法。
(3)理论研究成果的实现阶段(2000—至今)在此期间,Mahler等人利用随机集理论将单传感器单目标系统推广到多传感器多目标系统的研究中。
从统计的角度提出了多目标集合概率分布的“一阶矩滤波器”概念以及相应的PHD滤波算法。
近年来,基于随机集理论的方法应用在信息融合和多目标跟踪中,越来越受到学者的重视,国外学者以I. R. Goodman,Ronald Mahler,Ba-Ngu V o等为代表,已取得大量的理论成果以及一些应用成果。
基于随机集理论的多个声目标融合跟踪
林晓东;朱林户;王瑛
【期刊名称】《系统工程与电子技术》
【年(卷),期】2010(032)012
【摘要】针对杂波环境下,采用多个被动声传感器跟踪多个声目标的应用场合,建立了多个声目标跟踪的随机有限集模型,采用概率假设密度(probability hypothesis density,PHD)粒子滤波对该模型进行求解.针对PHD滤波器只适用于单传感器的问题,提出了一种实现多个声传感器融合跟踪的方法.该方法在序贯PHD滤波器的基础上进行改进,提高了目标检测率,通过仿真实验验证了该方法的有效性.
【总页数】5页(P2528-2532)
【作者】林晓东;朱林户;王瑛
【作者单位】空军工程大学工程学院,陕西,西安,710038;空军工程大学理学院,陕西,西安,710051;空军工程大学工程学院,陕西,西安,710038
【正文语种】中文
【中图分类】TP391
【相关文献】
1.基于随机集理论的多目标跟踪方法 [J], 权宏伟;李俊华;彭冬亮
2.基于随机集的传感器网络多目标航迹跟踪研究 [J], 周红波;万福;李炳伟
3.基于随机集的RBPF多目标关联跟踪算法 [J], 赵欣;姬红兵;杨柏胜
4.基于随机集理论的多目标跟踪研究进展 [J], 陈金广;马丽丽
5.一种基于随机集的复杂环境多目标跟踪滤波算法 [J], 江舟;白超宇;徐海涛;孙建军
因版权原因,仅展示原文概要,查看原文内容请购买。
多传感器多目标跟踪及航迹融合系统付琳;万晓冬;王保曾【期刊名称】《计算机与现代化》【年(卷),期】2014(000)010【摘要】多传感器数据融合能够实现信息互补以提高目标跟踪精度、识别能力以及增强系统的抗干扰性,因此受到广泛关注。
本文主要针对雷达和红外跟踪及航迹融合的体系结构,对目标跟踪、航迹关联和航迹融合的各个算法进行详细描述及仿真。
仿真结果表明,基于雷达和红外传感器数据融合跟踪相对于单传感器的跟踪,性能有所提高。
%Multi-sensor data fusion nowadays is widespreadly concerned because of the improving tracking accuracy, the ability to identify and the strengthen immunity system through complementary information.This paper mainly described various algorithms including target tracking, track association and track fusion based on radar and infrared data fusion architecture.The simulation results show that the effect of the fusion of radar and infrared tracking is better than that of single sensor tracking.【总页数】4页(P8-11)【作者】付琳;万晓冬;王保曾【作者单位】南京航空航天大学自动化学院,江苏南京 210016;南京航空航天大学自动化学院,江苏南京 210016;南京航空航天大学自动化学院,江苏南京210016【正文语种】中文【中图分类】TP274【相关文献】1.基于随机集的传感器网络多目标航迹跟踪研究 [J], 周红波;万福;李炳伟2.多传感器融合系统航迹号管理方法 [J], 唐小明;何友;黄晓冬3.小波分析在多传感器多目标跟踪的航迹相关算法中的应用 [J], 马霞;宋文彬;吴必富4.多传感器融合多目标跟踪中的序贯航迹关联算法 [J], 韩红;刘允才;韩崇昭;朱洪艳;左东广5.一种基于传感器的目标航迹起始决策算法在摄像头与毫米波雷达融合系统的应用[J], 马振刚; 郑艳因版权原因,仅展示原文概要,查看原文内容请购买。