wifi小车外网控制设置方法
- 格式:docx
- 大小:886.77 KB
- 文档页数:6
使用WiFi232-602模块连接台达PLC,进行内外网控制WIFI232-602模块通过串口连接台达PLC。
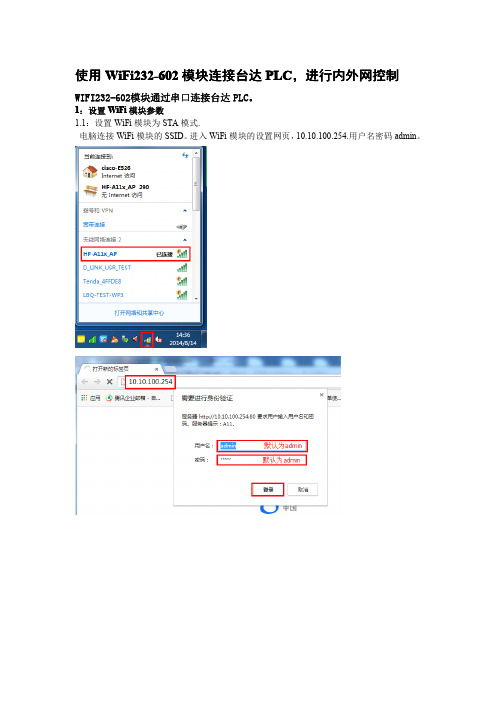
1:设置WiFi模块参数1.1:设置WiFi模块为STA模式.电脑连接WiFi模块的SSID。
进入WiFi模块的设置网页,10.10.100.254.用户名密码admin。
1.2:模块连接上网的路由器。
设置路由器的SSID和路由器的加密方式和密码1.3:设置WiFi模块连接PLC的串口参数1.4:设置socket A的网络参数,设置为TCP server端口设置为8899。
USR-WIFI232-Setup软件链接地址/Download/91.html2:本地内网电脑虚拟串口设置虚拟串口软件下载链接地址:/Download/31.html虚拟串口设置为TCP client。
主动去连接模块在局域网的IP。
查询IP为192.168.1.121。
端口为8899.3.台达PLC软件设置3.1:编辑页面3.2:通信设置页面设置通信端口为1为虚拟串口。
设置PLC串口通信参数。
3.3:软件执行运行4.外网通信设置4.1:WiFi模块AT指令设置AT+TCPB=on打开socket B。
AT+TCPPTB=7756为远程服务器端口。
AT+TCPADDB=218.241.25.91.设置远程服务器的地址。
AT+Z,重启模块使指令生效生效之后再次进入AT指令发送AT+TCPLKB.返回on说明已经连接到服务器。
4.2:服务器设置通过远程桌面连接,进入服务器的管理页面:4.3服务器端虚拟串口软件设置设置软件为TCP server。
监听通信端口7756。
4.4服务器端PLC软件串口设置,设置PLC软件连接的串口号为虚拟串口软件虚拟的com20在PLC的通信设置选择通信端口com20.4.5服务器端PLC软件与PLC进行远程通信。

车载DVR的WIFI设置说明DVR的WiFi设置举例说明。
条件:1、假设我DVR的 WiFi的IP地址为“192.168.1.145”。
注册服务器的ID为“00000000000000000001”。
注册密码为“888888”.2、无线路由器的IP为“192.168.1.2”。
无线SSID为“reson”。
无线模式为“802.11N”混合模式。
无线密钥为“888888”。
认证类型为“WPA-PSK”。
加密算法为“AES”。
3、假设VSMain、VSVtdu、RecorServer三个服务程序都装在同一台电脑上,IP地址为“192.168.1.25”。
服务端口为默认。
注意:DVR的WiFi IP地址要跟服务器的IP地址设为同一网段,例如服务器的IP地址为“192.168.1.25”,那DVR WiFi的IP地址也要设为1段的即“192.168.1.X”。
下面我们需要分别对无线路由器、DVR和装有服务器程序的电脑做设置。
一、无线路由器的设置这里以TP-LINK Wireless Lite N Router WR740N为例,不同型号无线路由器界面有所不同。
1、首先登陆无线路由器。
打开IE浏览器,在地址栏里输入无线路由器IP地址“192.168.1.2”。
回车调出登陆界面。
输入无线路由器的用户名和密码登陆无线路上器。
2、点击“无线设置”,在“基本设置”中设置SSID号为“reson”。
模式设为“11n only”。
设好后点“保存”。
3、点击“无线安全设置”,设置认证类型为“WPA-PSK”(目前我公司车载DVR无线认证类型只支持“WPA-PSK”),设置加密算法为“AES”(目前我公司车载DVR无线加密算法只支持“AES”),设置PSK密码为“888888”。
设好后点“保存”。
4、通常更改无线设置后路由器要重启才能升效。
此时无线路由器设置已完成,重启路由器。
二、车载DVR的设置1、将DVR的视频输出接好监视器。

手把手教你做WIFI开关,可语音控制外网局域网都可教程最后有所需要的工具及固件和手机APP下载链接。
一.准备材料:ESP8266 WIFI模块(固件理论支持所有8266芯片的WIFI模块)USB转TTL CH341串口模块(其他串口模块也行)3V-5V继电器AMS 1117 3.38050三极管10K电阻470R电阻10-100UF电容1041N4148二极管发光二极管(做指示灯)二、焊接模块最小系统。
由于我这边是单独模块,不能直接使用,如果是开发板就不用这一步了。
先上一个我使用的模块的最小系统电路图,如果你用的是其他8266模块,那么百度下相应的最小系统电路,其实现在的8266模块最小系统电路,基本都差不多,可以说是几乎一样。
因为这8266芯片都是同一个厂家生产的,只是被不同厂家封装而已。
原理图看着挺复杂(我也不会原理图哈哈)其实没多少东西,再来个实物图,方便像我一样的小白看明白了!就这点东西,实物图内只是没有3.3V稳压电路。
如果看不懂原理图的下面紧挨的刷固件的电路图,也是最小系统图。
三、刷固件。
刷固件的电路图,这张即使不懂原理图的应该也能看懂^_^再来张实物图。
1、IO2脚和GND脚连通2、模块上电(必须先连通IO2和GND后再上电)3、USB转TTL连接电脑USB(电脑没有驱动的请先行安装附件中的串口驱动)4、打开电脑设备管理器看COM端口号其他8266模块自行百度哦,其实也都差不多!径不能有错误。
下面COM PORT选咱刚才看的端口号。
6.设置好后,点击START 稍等,如果进度条正常,并出现完成,那恭喜你,成功一大半了!!!!如果失败则断电再上电反复几次一直失败?那检查接线是否正常,有时插头用空位都不行。
模块供电是否正常。
模块供电不足或者IO2和GND之间有虚焊都会影响刷写固件。
四、注册乐鑫云。
打开网页:https:///#/ 进行注册。
注册好以后,按照图示一步一步设置就行!到这步乐鑫云部分就完成了,这个可以建设N 多个模型数据点,就是可以控制N 多个模块。

150M 室外无线USB 网卡WLAN 无线接收器技术说明书(适用于LF LF--D510/LF D510/LF--D511/LF D511/LF--D520/LF D520/LF--D521/LF D521/LF--D530/LF D530/LF--D531D531))版本:版本:V2.0.0V2.0.0V2.0.0声明Copyright © 2012 深圳市深圳市拉法联科拉法联科拉法联科技术有限公司技术有限公司技术有限公司 版权所有,保留所有权利版权所有,保留所有权利未经深圳市拉法联科技术有限公司明确书面许可,任何单位或个人不得擅自仿制、复制、誊抄或转译本书部分或全部内容。
不得以任何形式或任何方式(电子、机械、影印、录制或其他可能的方式)进行商品传播或用于任何商业、赢利目的。
为深圳市拉法联科技术有限公司授权注册商标。
本文档提及的其他所有商标或注册商标,由各自的所有人拥有。
本手册所提到的产品规格和资讯仅供参考,如有内容更新,恕不另行通知。
除非有特殊约定,本手册仅作为使用指导,本手册中的所有陈述、信息等均不构成任何形式的担保。
物品清单小心打开包装盒,检查包装盒里面应有以下配件:一个150M无线USB网卡一份快速安装指南一张保修卡一张合格证一张包含驱动程序和管理软件的光盘注意:如果发现配件有损坏或者短缺的情况,请及时和当地的经销商联系。
目录第1章 产品概述 (5)1.1 产品特性 (5)1.2 安全警示: (5)第2章 安装指南 (6)2.1 硬件安装 (6)2.2 软件安装 (6)第3章 连入无线网络 (9)第4章 软AP设置 (12)第5章 STA+AP设置 (15)第6章 常见问题解答 (24)产品概述第1章产品概述感谢您购买LAFALINK拉法联科的产品,LAFALINK 150M室外无线USB网卡适用于台式电脑、笔记本等设备进行无线连接,可以提供方便、快捷的无线上网方式。
该网卡使用ABS防水外壳设计,能够防止在室外工作,其底座有螺丝孔位,可以固定在建筑物的外墙处。

车上无线网络解决方案第1篇车上无线网络解决方案一、项目背景随着互联网技术的飞速发展,无线网络已成为现代社会生活的重要组成部分。
为满足用户在出行过程中对无线网络的需求,提高用户乘车体验,本公司决定针对车辆设计一套合法合规的无线网络解决方案。
二、项目目标1. 实现车辆内无线网络的全覆盖,确保用户在乘车过程中能够流畅地使用网络。
2. 保障无线网络的稳定性和安全性,保护用户个人信息不被泄露。
3. 符合我国相关法律法规要求,确保项目的合法合规性。
三、方案设计1. 无线网络设备选型(1)车载无线接入点(AP):选用高性能、稳定性强的无线AP,支持802.11ac协议,提供高速无线网络接入。
(2)车载交换机:选用千兆以太网交换机,提供高速有线网络连接,满足车辆内部设备的数据传输需求。
2. 无线网络覆盖设计(1)车厢内部:在车厢内合理布置无线AP,确保无线信号覆盖均匀,无死角。
(2)车厢外部:在车辆外部安装天线,扩大无线网络覆盖范围,满足乘客在上下车时的网络需求。
3. 无线网络安全设计(1)采用WPA3加密协议,保障无线网络的加密强度。
(2)设置独立无线网络SSID,与公共网络隔离,降低安全风险。
(3)部署防火墙和入侵检测系统,实时监控网络流量,防止恶意攻击。
4. 合法合规性保障(1)遵循我国《网络安全法》等相关法律法规,保护用户个人信息。
(2)取得相关政府部门的审批,合法开展无线网络覆盖业务。
(3)与运营商合作,确保无线网络服务合法合规。
四、实施步骤1. 搭建测试环境,对选型设备进行性能测试,确保设备满足项目需求。
2. 设计无线网络覆盖方案,并根据实际测试结果进行调整。
3. 与车辆制造商沟通,确保无线网络设备与车辆兼容。
4. 部署无线网络设备,进行现场调试,确保无线网络覆盖效果。
5. 开展无线网络安全防护措施,确保网络稳定性和安全性。
6. 联合运营商进行合法合规性审查,取得相关审批手续。
7. 正式上线运营,持续优化无线网络服务。

声明Copyright © 2021 普联技术有限公司版权所有,保留所有权利未经普联技术有限公司明确书面许可,任何单位或个人不得擅自仿制、复制、誊抄或转译本手册部分或全部内容,且不得以营利为目的进行任何方式(电子、影印、录制等)的传播。
为普联技术有限公司注册商标。
本手册提及的所有商标,由各自所有人拥有。
本手册所提到的产品规格和资讯仅供参考,如有内容更新,恕不另行通知。
除非有特殊约定,本手册仅作为使用指导,所作陈述均不构成任何形式的担保。
目录第1章前言 (1)1.1 目标读者 (1)1.2 本书约定 (1)1.3 适用机型 (1)第2章基础联网设置 (3)2.1 企业路由器基本设置指南 (3)2.1.1 应用介绍 (3)2.1.2 需求介绍 (3)2.1.3 设置方法 (3)2.1.4 注意事项 (7)2.2 企业路由器IPv6上网配置指导 (8)2.2.1 应用介绍 (8)2.2.2 需求介绍 (8)2.2.3 设置方法 (8)2.2.4 疑问解答 (15)第3章设备管理 (17)3.1 如何在外网远程管理(控制)路由器? (17)3.1.1 应用介绍 (17)3.1.2 需求介绍 (17)3.1.3 设置方法 (17)3.1.4 注意事项 (20)3.1.5 疑问解答 (21)3.2 如何设置自动重启? (22)3.2.1 应用介绍 (22)3.2.2 需求介绍 (22)3.2.3 设置方法 (22)3.2.4 注意事项 (23)第4章负载均衡 (24)4.1 多WAN口路由器负载均衡的设置指南 (24)4.1.1 应用介绍 (24)4.1.2 需求介绍 (24)4.1.3 工作原理 (24)4.1.4 设置方法 (25)第5章路由转发模块 (27)5.1 策略路由设置指南 (27)5.1.1 应用介绍 (27)5.1.2 需求介绍 (27)5.1.3 设置方法 (28)5.1.4 疑问解答 (31)5.2 ISP选路设置指南 (33)5.2.1 应用介绍 (33)5.2.2 需求介绍 (33)5.2.3 设置方法 (34)5.3 静态路由设置指南 (36)5.3.1 应用介绍 (36)5.3.2 需求介绍 (36)5.3.3 设置方法 (37)5.4 线路备份设置指南 (38)5.4.1 应用介绍 (38)5.4.2 需求介绍 (38)5.4.3 设置方法 (38)5.4.4 注意事项 (40)5.5 虚拟服务器设置指南 (41)5.5.1 应用介绍 (41)5.5.2 需求介绍 (41)5.5.3 设置方法 (42)5.5.4 疑问解答 (43)5.6 NAT-DMZ功能设置指南 (44)5.6.1 应用介绍 (44)5.6.2 需求介绍 (44)5.6.3 设置方法 (45)第6章AP和易展管理 (47)6.1 AP管理设置指南 (47)6.1.1 应用介绍 (47)6.1.2 需求介绍 (47)6.1.3 设置方法 (47)6.2 易展AP设置指南 (53)6.2.1 应用介绍 (53)6.2.2 需求介绍 (53)6.2.3 设置方法 (54)6.2.4 注意事项 (58)第7章行为管控 (59)7.1 连接数限制设置指南 (59)7.1.1 应用介绍 (59)7.1.2 需求介绍 (59)7.1.3 设置方法 (59)7.1.4 疑问解答 (60)7.2 访问控制设置指南 (61)7.2.1 应用介绍 (61)7.2.2 需求介绍 (61)7.2.3 设置方法 (61)7.2.4 疑问解答 (67)7.3 应用限制设置指南 (68)7.3.1 应用介绍 (68)7.3.2 需求介绍 (68)7.3.3 设置方法 (68)7.4 网址过滤设置指南 (71)7.4.1 应用介绍 (71)7.4.2 需求介绍 (71)7.4.3 设置方法 (71)7.4.4 疑问解答 (75)7.5 网页安全设置指南 (76)7.5.1 应用介绍 (76)7.5.2 需求介绍 (76)7.5.3 设置方法 (76)第8章安全防护 (78)8.1 ARP防护设置指南 (78)8.1.1 应用介绍 (78)8.1.2 需求介绍 (78)8.1.3 设置方法 (78)8.1.4 疑问解答 (84)8.2 MAC地址过滤设置指南 (86)8.2.1 应用介绍 (86)8.2.2 需求介绍 (86)8.2.3 设置方法 (86)第9章VPN模块 (88)9.1 IPSec VPN设置指南 (88)9.1.1 应用介绍 (88)9.1.2 需求介绍 (88)9.1.3 设置方法 (89)9.2 L2TP VPN设置指南 (96)9.2.1 应用介绍 (96)9.2.2 需求介绍 (96)9.2.3 设置方法 (97)9.3 PPTP VPN设置指南 (105)9.3.1 应用介绍 (105)9.3.2 需求介绍 (105)9.3.3 设置方法 (106)9.4 L2TP VPN代理上网设置指南 (115)9.4.1 应用介绍 (115)9.4.2 需求介绍 (115)9.4.3 设置方法 (115)9.5 PPTP VPN代理上网设置指南 (120)9.5.1 应用介绍 (120)9.5.2 需求介绍 (120)9.5.3 设置方法 (120)第10章认证管理 (125)10.1 一键上网设置指南 (125)10.1.1 应用介绍 (125)10.1.2 需求介绍 (125)10.1.3 设置方法 (126)10.2 短信认证设置指南 (130)10.2.1 应用介绍 (130)10.2.2 需求介绍 (130)10.2.3 设置方法 (131)10.3 Portal认证设置指南—使用内置WEB服务器和内置认证服务器 (136)10.3.1 应用介绍 (136)10.3.2 需求介绍 (136)10.3.3 设置方法 (137)10.4 Portal认证设置指南—使用内置WEB服务器和外部认证服务器 (141)10.4.1 应用介绍 (141)10.4.2 需求介绍 (141)10.4.3 设置方法 (142)10.5 Portal认证设置指南—使用外置WEB服务器和内置认证服务器 (146)10.5.1 应用介绍 (146)10.5.2 需求介绍 (146)10.5.3 设置方法 (147)10.6 Portal认证设置指南—使用外置WEB服务器和外置认证服务器 (150)10.6.1 应用介绍 (150)10.6.2 需求介绍 (150)10.6.3 设置方法 (151)10.7 免认证策略的使用方法 (154)10.7.1 应用介绍 (154)10.7.2 需求介绍 (154)10.7.3 设置方法 (155)10.8 Portal认证中,外部WEB服务器建立规范 (158)10.8.1 应用介绍 (158)10.8.2 流程规范 (159)第11章工业级特性 (163)11.1 如何使用工业级路由器? (163)11.1.1 产品介绍 (163)11.1.2 需求介绍 (163)11.1.3 设置方法 (164)第12章其它功能 (168)12.1 地址组的设置与管理 (168)12.1.1 应用介绍 (168)12.1.2 需求介绍 (168)12.1.3 设置方法 (168)12.1.4 疑问解答 (170)12.2 带宽控制设置指南 (172)12.2.1 应用介绍 (172)12.2.2 需求介绍 (172)12.2.3 设置方法 (172)12.2.4 疑问解答 (175)12.3 PPPOE服务器应用设置指南 (177)12.3.1 应用介绍 (177)12.3.2 需求介绍 (177)12.3.3 设置方法 (178)12.3.4 疑问解答 (181)12.4 网络唤醒功能使用指南 (183)12.4.1 应用介绍 (183)12.4.2 需求介绍 (183)12.4.3 设置方法 (183)12.5 诊断工具使用指南 (186)12.5.1 应用介绍 (186)12.5.2 需求介绍 (186)12.5.3 设置方法 (187)第1章前言本手册旨在帮助您正确使用R系列企业级路由器。

ROVIO机器人WIFI直连设置教程以及外网教程首先感谢大家选购牛牛牛设计的大灯组件以及带大灯组件的ROVIO机器人。
/item.htm?id=17417583593 大灯组件/item.htm?id=175******** ROVIO机器人因为ROVIO原来的USB客户端是在XP时代开发的,现在的大家的系统基本都升级为WIN7了,而且还有32位和64位的区别。
所以使用USB连接设置会产生很多兼容性的问题。
推荐大家使用WIFI直接连接设置ROVIO。
在设置之前你需要准备一台带无线网卡的笔记本或台式机。
建议浏览器使用谷歌浏览器。
苹果系统的笔记本也可以使用。
首先打开ROVIO机器人,等待几秒,观察ROVIO机器人的电源指示灯是否为绿色。
如下图所示。
如果不是,请恢复ROVIO机器人设置,方法为。
关掉ROVIO机器人电源再打开,等电源指示灯变为橙色再关掉。
重复三次,第四次打开ROVIO机器人。
电源指示灯就会闪烁。
最后变为绿色。
此时ROVIO机器人已成功恢复初始设置。
此时,笔记本的无线连接里就会出现ROVIO的SSID。
然后点击连接。
成功后打开网络和共享中心。
然后找到无线网络连接属性打开属性设置TCP/IPv4,IP设置为192.168.10.10,然后子网掩码为255.255.255.0。
然后确定.完成后打开谷歌浏览器,输入IP地址192.168.10.18,即可以进入ROVIO机器人控制界面。
首先点击控制界面右上角的设置(setings),然后点击系统(system)然后观察系统是否为5.03及以上的版本,低于5.03版本需要更新固件。
中文固件下载地址:/d/HACVXASGNMDR下载完成后,点击选择文件,然后找到下载的固件,然后点击更新(update),再点击确定,注意:升级需要保持ROVIO机器人需要有一定电量,最好刷机前放置在底座上面保持充电状态。
此时ROVIO机器人会进行更新固件读秒。
请不要进行任何操作以免刷机失败,等待刷机成功后。

车联网远程操作方法
车联网远程操作方法是通过车载互联网连接的车辆终端,使车主通过手机应用、车载系统或其他终端,实现对车辆的远程操作。
以下是一些常见的车联网远程操作方法:
1. 车辆定位:通过车联网系统,车主可以获取车辆的实时位置信息,包括车辆所在地点、行驶路线等。
2. 远程锁车/解锁:车主可以通过手机应用,在离车辆一定距离的范围内,远程控制车辆进行锁车或解锁操作。
3. 远程启动/熄火:通过手机应用,车主可以在未进入车辆的情况下,远程启动或熄火车辆。
这对于预热或制冷车内环境非常有用。
4. 车辆诊断:车辆联网后,车主可以通过手机应用获取车辆的诊断信息,包括检测发动机、车身电子系统等故障码和警告信息。
5. 远程控制车内设备:车主可以通过手机应用远程控制车辆内的一些设备,例如调节空调、打开车窗、调整座椅等。
6. 防盗和安全功能:车联网系统可以与车辆的防盗系统集成,车主可以通过手机应用实时监控车辆状态,接收报警通知。
需要注意的是,具体的远程操作方法和功能会根据车辆品牌和车型的不同而有所差异。
车主在使用车联网远程操作功能前,需要确保车辆已经连接到互联网,并且已经注册和绑定了相关的远程操作账号。
同时,车主也要确保网络连接的安全性,避免被黑客攻击和车辆被未授权的远程操作。

车载WiFi解决方案引言随着科技的发展和智能设备的普及,越来越多的人在出行过程中希望能够随时随地使用互联网来满足各种需求,例如上网浏览信息、看视频、听音乐等。
而车载WiFi作为一种便捷的解决方案,正逐渐成为车主和乘客们的首选。
本文将介绍车载WiFi的基本原理、应用场景以及解决方案。
车载WiFi的原理车载WiFi指的是在汽车内部通过无线网络连接来实现车内互联网的功能。
它通常由以下几个组成部分构成:1. 车载WiFi设备车载WiFi设备是实现车内互联网的核心组成部分。
它通常包括一个WiFi信号发射器和一个接收器。
WiFi信号发射器负责将无线网络信号发送到车内,而接收器则负责接收车内设备发送的网络请求并将其转发给互联网。
2. 互联网连接车载WiFi设备需要与互联网建立连接才能提供网络服务。
有几种常见的互联网连接方式,包括使用行车记录仪的SIM卡、通过蓝牙与手机的网络共享功能连接等。
3. 车载WiFi管理系统车载WiFi管理系统是用于管理和控制车载WiFi设备的软件系统。
它可以实现对设备的远程控制、用户访问控制以及流量管理等功能。
车载WiFi的应用场景车载WiFi在现代出行中有着广泛的应用场景,以下是其中一些常见的场景:1. 车队管理对于大型的物流公司或出租车公司来说,车载WiFi可以帮助他们实现对车辆的实时监控和调度。
通过车载WiFi设备,公司可以追踪车辆的位置,同时也能够监控车辆的状态以确保车辆的安全和高效运营。
2. 乘客娱乐在长途旅行中,乘客可能会感到无聊,此时车载WiFi就能提供一种娱乐方式。
乘客可以通过车载WiFi连接到互联网,观看在线视频、听音乐、玩游戏等,大大提升旅行的乐趣。
3. 移动办公对于一些商务人士来说,汽车往往是他们临时处理工作的场所。
通过车载WiFi,他们可以使用手机、平板电脑等设备连接到公司内部网络,处理邮件、开会、查看文件等,提高工作效率。
4. 互联网购物车载WiFi也为乘客提供了在车内进行在线购物的机会。

carplay无线连接方法CarPlay是苹果公司推出的一项车载系统,它可以让你在车内使用iPhone的部分功能,比如导航、音乐、通讯等。
而现在,CarPlay还支持无线连接,让用户不再需要通过数据线连接手机和车载系统。
接下来,我将为大家介绍CarPlay无线连接的方法。
首先,确保你的车载系统支持无线连接功能。
目前,大部分新车型都已经支持CarPlay无线连接,但是一些旧的车型可能需要进行软件升级才能使用这项功能。
你可以查看车载系统的说明书或者咨询汽车厂商,确认你的车载系统是否支持无线连接。
其次,确保你的iPhone和车载系统连接到同一个Wi-Fi网络。
无线连接的前提是你的iPhone和车载系统都连接到同一个Wi-Fi网络,所以在使用CarPlay无线连接之前,你需要先将你的iPhone连接到车载系统所在的Wi-Fi网络。
然后,打开你的iPhone的设置,进入“通用”-“CarPlay”-“可用车辆”,选择你的车载系统。
在这个界面上,你可以看到你的车载系统是否支持无线连接,如果支持,你可以选择“连接无线CarPlay”来开始连接。
接着,车载系统会显示一个连接代码,你需要在iPhone上输入这个代码来完成连接。
在iPhone上,你会看到一个弹窗提示你输入连接代码,输入正确的代码后,你的iPhone就会和车载系统成功连接。
最后,一旦连接成功,你就可以在车内使用CarPlay的各项功能了。
你可以使用导航来规划路线,播放音乐,接听电话等。
而且,由于是无线连接,你可以在车内自由移动,而不再受到数据线的限制。
总的来说,CarPlay无线连接为车主提供了更加便利的使用体验,让你可以更加轻松地使用iPhone的功能。
但是在使用无线连接时,也需要注意一些问题,比如稳定的Wi-Fi信号、电量消耗等。
希望以上介绍对你有所帮助,祝你在车内享受愉快的CarPlay体验!。

如何防止别人蹭wifi 防止别人蹭网六种方法介绍各位读友大家好,此文档由网络收集而来,欢迎您下载,谢谢你家的无线宽带是否被人“蹭”过?如何赶跑恶意的“蹭网小偷”?很多人可能会认为,蹭网,不就是自己家的无线网络被别人用一下么?千万不要轻视“被蹭网”的危害。
如果想要知道自己的无线网是否被别人蹭到,想知道别人是怎么破解无线密码的,想知道如何防止别人蹭wifi ,看看这篇文章。
防止查询是否被别人蹭网的方法1、你用的路由器吧,在IE地址栏输入,然后看到输入密码和用户名,密码和用户名都是admin,看到当前连接项目,有多余的电脑的话就被蹭网了,如果是无线路由器,最好是把无线广播给关了。
END防止被别人蹭网的防御措施1、采用WPA/WPA2-PSK加密:蹭网一族一般用的都是傻瓜破解软件,只能破解WEP加密的无线信号;稍微高级点的蹭网族会用抓包工具分析数据包里面的内容,从而破解得到WEP的密钥。
但是如果采用了WPA-PSK或者WPA2-PSK加密的话,一般情况下很难有人可以蹭到你的网。
这是目前杜绝蹭网最有效的方法!设置方法也很简单,只要进到无线设置中,把加密模式改为WPA-PSK,再输入密钥就OK啦。
2、关闭SSID(网络名称)广播:设置好无线加密后,我们就需要开始隐藏自己了。
通过关闭无线路由/AP 的SSID广播,“蹭网”者就很难在搜索无线时发现你的无线网络,这也就减少了你的无线网络被“蹭”的机会。
当然,修改一个有个性的SSID也很重要,这样可以防止被“蹭网”者猜到。
设置方法很简单,进入无线路由/AP的Web配置界面,然后找到“基本设置”菜单,在其中修改SSID名称,然后选择“停用SSID广播”,最后点击确定即可。
3、关闭DHCP功能:关闭了SSID广播,我们还需要关闭DHCP功能,也就是让无线路由/AP无法自动给无线客户端分配IP地址。
而为了进一步防止被“蹭网”,我们最好修改无线路由/AP的默认IP地址,例如默认IP 地址为:,我们可以修改为,这样可以防止被“蹭网”者轻易猜到。

AGV小车IP设置说明
一、笔记本网卡设置
笔记本有线网卡的设置如下:
IP地址:192.168.126.2,子网掩码:255.255.255.0
二、将笔记本与AGV小车无线模块RJ45接口用超5类双绞线连接好,重新给
AGV小车上电;
用IE 浏览器打开地址http://192.168.126.254
三、打开页面后按如下图设置:
1.设置IP地址,IP configuration处选择“Staic”项,IP address处填写相应小车的IP地址,Netmask处填写相应的子网掩码。
图中IP地址和子网掩码仅为示例,请根据实际小车对应的IP地址填写。
2.设置网络名SSID,网络类型选择“Infrastructure Mode”,SSID处填写具体的网络名,一般为kcagv,不同地方可能不一样。
以实际网络名为准。
3.加密设置,选择如图所示各项内容,密码有不同的需要更改。
4.上位模式设置,Application处选择Socket,Mode选择TCP Client,Destination address处填写相应上位机的IP地址(上位计算机IP),port处填写相应端口号。
端口号有时候会自动加1,可以先设置成比实际端口号小一位,如要用5048端口,设置时写5047。
具体设置后有没有自动加1位,可以设置完成重启后,通过左侧的“senal port settings”处查看,如果里面显示是自己所需的端口号即可。
5.串口设置,串口设置完全按照图示设置即可。
设置完后重新给AGV小车上电。
检查端口号等没有问题即设置完成。

carplay无线连接方法
苹果CarPlay的无线连接方法如下:
1. 确保您的iPhone和汽车都支持无线CarPlay功能。
目前,只有部分汽车和iPhone型号支持无线连接。
您可以在苹果官方网站或汽车制造商的网站上查找相关信息。
2. 在汽车的控制面板或多媒体系统中,找到CarPlay选项并启用无线连接。
这可能需要您按下设置按钮或通过车载屏幕上的菜单导航。
3. 在iPhone上,打开设置应用程序,并选择“通用”选项。
4. 滚动到“CarPlay”选项下,并选择您的车辆。
如果您的汽车支持无线连接,则会显示无线选项。
5. 在CarPlay设置页面上,选择“允许无线连接”。
6. 确保您的iPhone已连接到汽车的Wi-Fi网络。
在无线CarPlay设置完成后,您的iPhone将自动连接到汽车的Wi-Fi 网络。
7. 返回到汽车的控制面板或多媒体系统,您应该能够看到您的iPhone的CarPlay界面显示在屏幕上。
请注意,无线CarPlay的可用性和连接方法可能因车型和
iPhone型号而异。
如果您遇到任何问题,请参阅汽车制造商的用户手册或联系他们的客户支持部门以获取帮助。

基于Arduino开源平台的WIFI视频监控小车市面上美国 WowWee公司推出路威(ROVIO)机器人,一个可以通过WiFi无线局域网络控制的八方移动的机器人摄像机,支持使用者利用内部网络或者通过INTERNET来进行远程遥控。
通过网络,使用台式电脑、笔记本、智能手机(PDA,SMARTPHONE),PSP和WiLi遥控手柄进行控制,具有实时控制监控、声像传递、根据设定路线(path)巡航,拍照,自动EMAIL。
在这里我们可以通过价廉的路由器搭建WIFI视频监控小车。
加起来成本一千多元就可以搞定一台可以自己编程玩的机器人。
下面是材料清单:材料清单序号材料名称单价1 A4WD小车2052 ROMEO控制板3003 5节2300MAH电池654 12V电池包1305 充电器906 上海贝尔RG-100A路由器557 中星微301摄像头208 两自由度DF15MG云台259合计:11241. A4WD是一个铝合金结构的四轮驱动小车,每个轮子都有一个电机作为驱动,马力强劲。
首先根据小车附带的安装说明书装配小车车体,如图就是装好的效果。
在底盘里面装了5节2300MAH的镍氢充电电池。
2. 接下来安装ROMEO扩展板,ROMEO扩展板是一个基于Arduino开源平台的扩展板。
因为全球DIY爱好者都在使用,所以提供了丰富的例子程序。
基本上想实现的功能都能够找到参考代码。
Arduino封装了底层枯燥的寄存器操作,使程序开发都是基于应用的函数调用。
输入输出口的定义也是非常直观。
程序操作某个口,就对应硬件的某个接口。
3. 安装两自由度DF15MG云台及其摄像头,DF15MG云台可以上下左右180度旋转。
301摄像头是一个裸板没有外壳,所以体积非常小,用一个红外开关的支架就可以装上去,还需要用热熔胶固定。
这里我把摄像头的USB线减掉了很长,消除了很大的牵绊。
4.最复杂也是最重要的设备来了,就是一个无线路由器。
路由器需要支持OpenWrt。

独角兽电子手机蓝牙遥控车:手机端教程官方群90060059里先查看本店的《六种智能车制作教程》把车组装好并上电,然后按照如下步骤操作。
注意:如果出现异常,那可能是由于手机问题,就换个手机试试。
!!第一步:90060059群文件下载并安装下面这个软件,不知道就问群主第三步:搜索过后会出现如下本图这样:蓝牙模块红灯闪才能被搜索到第二步:安装后点击进入,会出现如下图示第五步:设备连接后点击键盘模式第七步:设置为51,然后点击确定,第六步:进入后点击右上角的“三个点”,再点击设置长按发送频率第四步:点击搜索出来的结果,进入后再点击“连接设备”第九步:点击配置键盘值后会出现个对话框,然后随便选择一个键按如下设置。
再点击确定第十步:再随便点击一个键进行如下设置。
再点击确定第八步:然后再点击右上角的“三个点”,再点击配置键盘值第十一步:再随便点击一个键进行如下设置。
再点击确定第十三步:再随便点击一个键进行如下设置。
再点击确定第十二步:再随便点击一个键进行如下设置。
再点击确定第十四步:点击右上角的“三个点”,再点击保存键盘配置第十五步:开车,新手上路独角兽电子手机WIFI遥控车:手机端教程官方群90060059里先查看本店的《六种智能车制作教程》把车组装好并上电,然后按照如下步骤操作。
第二步:点击连接这个由ESP8266产生的开放WIFI 第三步:IP和端口号不管。
直接点击“CONNECT”,然后开车,按键不要太快!开车:如果断开后就断开再连接就好。
第一步:90060059群文件下载并安装下面这个软件,不知道就问群主。


车载Wifi方案简介车载WiFi是指在车辆内部提供无线网络连接的解决方案。
它允许车内乘客和驾驶员在行驶过程中通过连接到车辆的无线网络来享受互联网服务。
车载WiFi方案可以为乘客提供高速上网、在线娱乐和实时导航等功能,为驾驶员提供车辆诊断和远程监控等服务。
本文将介绍车载WiFi方案的工作原理、应用场景以及实施步骤。
工作原理车载WiFi方案基于移动无线通信技术,通常采用4G LTE网络或者Wi-Fi连接来实现车辆与互联网的连接。
以下是车载WiFi方案的工作原理:1.车载设备:车载WiFi方案需要一个车载设备来提供无线网络连接。
这个设备通常由一个小型路由器或者一个移动热点组成,可以通过SIM卡或者外部的4G LTE模块连接到网络。
2.网络连接:车载设备通过4G LTE网络或者Wi-Fi与互联网服务提供商的服务器建立连接。
这个连接是通过一个安全的通道来传输数据的,确保数据的安全和隐私。
3.乘客和驾驶员连接:乘客和驾驶员可以通过连接到车载设备提供的无线网络来访问互联网。
他们可以使用自己的移动设备,如手机、平板电脑或者笔记本电脑来连接到车载WiFi并享受在线娱乐、上网冲浪等功能。
4.应用服务:车载WiFi方案还可以提供一系列的应用服务,如车载娱乐系统、车辆诊断和远程监控等。
这些服务可以通过连接到车载WiFi的设备来访问和控制。
车载WiFi方案在许多场景中都有广泛的应用。
以下是一些常见的应用场景:1.出租车和专车服务:出租车和专车服务可以通过提供车载WiFi来吸引更多的乘客。
乘客可以在车内享受高速上网,使用社交媒体、浏览新闻、观看视频等。
2.商务巴士和旅游车:商务巴士和旅游车可以为乘客提供车载WiFi来提供更好的出行体验。
乘客可以在车内进行工作、查看邮件、参加在线会议等。
3.公共交通工具:公共交通工具,如公交车和地铁,可以提供车载WiFi来吸引更多的乘客。
乘客可以在车内上网冲浪,获取实时公交信息、地图导航等。

欧蓝德加装wifi模块教程
要给欧蓝德车型加装WiFi模块,您可以按照以下步骤进行操作:
1. 准备所需材料和工具:WiFi模块、暴风车载WiFi盒子、扳手、螺丝刀等。
2. 找到车辆中控面板下方的蓝牙模块位置,通常位于面板右侧。
使用螺丝刀拆下中控面板底部的螺丝。
3. 将中控面板底部的连接器和蓝牙模块之间的电线拔下。
4. 将WiFi模块的连接器插入刚刚拔下的电线连接器中。
5. 将WiFi模块安装在合适的位置,确保连接器和电线连接牢固。
6. 使用螺丝刀固定WiFi模块,确保其不会松动。
7. 将暴风车载WiFi盒子连接到WiFi模块的连接器上,确保
连接牢固。
8. 将中控面板底部的蓝牙模块重新安装到中控面板上,扣好螺丝。
9. 确保所有连接器均连接牢固后,关闭车辆电源。
10. 打开车辆电源,检查WiFi模块和WiFi盒子是否正常工作。
如果一切正常,您应该可以连接到新安装的WiFi。
请注意,以上步骤仅供参考。
在进行任何车辆改装前,建议咨询专业人士或向制造商寻求帮助,以确保正确操作并避免损坏车辆或系统。

⏹网络设置:包括本地网络设置(LAN)、3G网络设置和wifi网络设置✓LAN:使用局域网通过网线连接至车载DVR RJ45网络接口✓3G: 使用3G上网卡插入车载DVR SIM卡槽✓WIFI:使用车载DVR WIFI接口连接WIFI局域网●本地网络设置(LAN):✓网络类型:LAN/3G-WIFI可选✓自动获取:自动获取IP选择(为防止车载DVR与当前局域网IP冲突,建议选ON(此时路由器上的DHCP服务器必须开启,且一个局域网内只能有一个DHCP服务器开启)✓静态地址:设置在LAN或者WIFI模式下的DVR静态IP地址✓子网掩码:设置在LAN或者WIFI模式下的DVR所使用的子网掩码✓默认网关:设置在LAN或者WIFI模式下的DVR所使用的子网的网关✓域名解析:本地域名解析服务器(DNS)IP地址(服务器IP为域名时,需要输入,如果采用固定IP时不需要)✓服务器:服务器IP地址或者在服务器上绑定的动态域名地址(其中122.013.152.212服务器IP是我公司为方便客户测试所搭建的服务器,当客户自己搭建服务器时,请输入所对应的服务器IP地址);✓端口号:服务器接收车载DVR的端口号(保持默认设置,一般不需更改)●3G网络设置:✓选择3G上网类型时,需在“网络设置”→“LAN”下,修改网络类型为3G-WIFI ✓“自动获取”选 ON(因3G上网后网络供应商ISP 所分配的IP为动态IP)✓进入“网络设置”→“3G”选项,进入以下设置界面:✓APN:网络运营商网络数据接入地址,中国可不更改✓拨号号码:拨号上网的号码,中国可不更改✓用户名:网络登陆用户名,中国可不更改✓密码:网络登陆密码,中国可不更改注释:当使用3G上网方式时,请核对您所购买的设备所支持的3G模块类型。
●WIFI网络设置✓选择WIFI上网类型时,需在“网络设置”→“LAN”下,修改网络类型为3G-WIFI✓“自动获取”选 ON(此时路由器上的DHCP服务器必须开启,且一个局域网内只能有一个DHCP 服务器开启)✓通过“网络设置”→“WIFI”选项,进入设置界面:✓SSID:WIFI路由器设备名✓密码:WIFI连接密码✓认证类型:同时支持WPA-PSK、WPA2-PSK✓加密算法:同时支持CCMP、TKIP路由器WIFI加密方式图注释:车载DVR使用WIFI模式连接网络时,首先应查看路由器的WIFI认证类型、加密方式是否与车载DVR的认证类型、加密方式一致,当不一致时,修改路由器WIFI认证类型、加密方式与车载DVR认证类型、加密方式一致即可。
前面那么多的教程都是关于如何制作一台WIFI智能小车机器人,那么真正的运用到实际上,我们可以利用这个小机器人做什么呢?相信大家都会想到这一点:远程安防监控与控制!好的,本期教程专门介绍如何让我们的机器人与互联网相连,然后可以在全球范围内控制它。
本教程使用的WIFI板/路由器为WR703N,DB120的路由外网控制设置其实sunxiaofei 网友已经发布过一个教程,大家可以到论坛置顶帖里找。
一、基本原理
外网控制的基本原理就是“端口映射”+“动态域名”。
什么叫端口映射呢?简单地说,就是在你家里的无线路由器上做一个设置,使得外网对于路由器上一个特定的端口的访问会被路由器重新转到一个指定的IP主机和端口,这样一来,家里的无线路由器就等于是一个“桥”,联通了外网和小车机器人上面的路由,使得我们可以在外网控制家里的机器人。
那么“动态域名”又是什么呢?大家可以想想:我们家里的路由器每次开机后,对外的IP地址都是不同的,那么控制小车就需要每次通过查询路由对外的IP地址,然后重新设置控制端的IP,这是个很麻烦的事。
“动态域名”就可以完美地解决这个问题,你先向动态域名提供商申请一个动态域名,这个域名是不变的,比如:,提供商会给你一个账号密码,把这个账号密码填入路由的动态域名功能里面,每次开机的时候,路由就会向域名提供商的服务器登录,服务器就可以获取本次登录时,路由对外网的地址,然后自动帮你把这个新IP绑定在这个域名上面,这样一来,我们就没必要每次都去找路由当前的IP了,直接输这个域名就可以连到我们的路由。
我们今天要做的也就是利用上面的原理完成外网到家里的无线路由器,再到机器人上面的WIFI板这一过程。
二、外网映射设置
1、家庭路由器设置。
首先需要一个家用的路由器,可以上外网的,这个路由器就是作为沟通小车与外界的桥梁。
在这里,我选用了我的TP-Link WR641G+路由器,这个当年可是三百多大洋买的,死贵死贵····
第一步:设置转发规则
如下图所示,登陆家庭路由器的192.168.1.1管理界面,找到转发规则——》虚拟服务器
在这里,因为我们的WIFI机器人运行需要开两个端口,端口8080为视频端口,端口2001为控制端口,所以我们添加两个端口转发规则,这边我使用192.168.1.108作为转发的目标客户端,这就是我们的WIFI板IP地址。
这个IP可以自己定的,但是必须为固定的。
并且在家庭路由器的DHCP范围内。
通过这个设置,来自外网的对8080端口和2001端口的访问将重新发送到192.168.1.108这个IP的客户端上,也就是我们的WIFI板。
第二步:设置静态地址分配
如下图,这一步中的MAC地址即为WIFI板的MAC地址,WIFI板MAC地址可以在其管理页面里面找到。
IP地址固定为192.168.1.108,与上一步一样。
好的,家庭路由器这一端的设置就告一段落了。
2、WIFI板的设置
第一步:将WIFI板的模式从AP模式改成Client模式,如下图
点击“修改”
在配置模式的页面,修改为Client模式,同时BSSID项填入家庭路由的SSID名称,如下图:
第二步:插上网线,因为这个时候模式已经从AP模式变成了Client模式了,所以我们是没法再搜索到WIFI板的SSID,此时关闭无线,改用网线进行操作。
插上网线登陆WIFI板,找到无线选项,如下图:
点击“搜索”,此时WIFI板会搜到很多附近的WIFI热点信号,我们选择自己家里刚刚设置的那个家庭路由的热点,选择“加入网络”。
点击之后,会跳出“加入网络”设置的页面,如下:
在WEP passphrase项里面,填入家庭路由器的密码,(不是管理页面的密码)。
同时防火墙区域选择“未指定”
第三步,打开“接口”选项卡,可以看到多了一个WWAN接口,也就是刚刚添加的那个网络。
点击WWAN接口的“修改”,将打开该接口的设置页面,在这个页面里,把“协议”选为静态地址,IP设置为刚刚在家庭路由器上指定的静态地址“192.168.1.108”,子网掩码为:“255.255.255.0”,网关为上一级路由网关,也就是“192.168.1.1”,执行保存。
第四步:回到“接口”选项卡,点击“LAN”设置LAN口IP地址,不要与上一级选为一样的管理地址,所以在这里可以设置为192.168.2.1
执行保存,此时又会出现无法显示页面————那是当然的,因为管理的IP都变了,所以我们用192.168.2.1登陆WIFI板,又可以出现熟悉的Openwrt管理页面了。
第五步:关闭防火墙
如下图:
在防火墙配置页面里面,把“启用SYN-flood防御”去了,下面的所有选项,凡是“禁止”的一概设为“允许”,保存。
好了,通过以上的配置,你现在可以拔掉网线,打开电脑的无线,连上家庭路由器,然后打开CMD命令提示行,尝试输入ping 192.168.1.108 如果能ping通,基本就大功告成了!
现在,我们来尝试远程查看视频,登陆网站,或者,登陆家庭路由器的路由状态页面,可以看到当前路由器对外网的IP地址,把这个地址替换掉我们原来看机器人摄像头视频的地址,比如,假设现在路由器对外网的IP是202.119.23.122,那么把http://202.119.23.122:8080/?action=stream这个地址发送给你在外网的朋友,让他用火狐浏览器打开,如果一切正常,他看到的页面里面有一个视频窗口,显示着当前摄像头的实时视频,和我们直连WIFI小车的方式所见到的是一样的效果。
OK,到这一步,就意味着外网映射控制智能小车机器人设置成功了。
那么如果使用工作室开发的PC版、手机版上位机如何查看视频和控制呢?操作如下:
打开控制端的“设置”界面,在视频地址项里,填入视频地址:http://你的当前路由外网IP地址:8080/?action=stream控制地址项:你的当前路由外网IP地址控制端口:2001
这样就行了。
目前经过几位外地网友的测试,发现视频传输速度还是很不错的,基本能达到7fps,没有很明显的卡屏现象。
二、动态域名设置
如果不嫌麻烦,那么如上的设置就可以做到在全世界任何有互联网的地方控制家里的智能小车机器人了,当然,只要你家里的路由器不要关,这个IP是可以一直保持的,但是难免会关闭的情况,每关闭一次就得重新查询当前路由的外网IP,这多麻烦!
为了解决这个问题,可以去花生壳动态域名服务商或者3322域名服务商申请一个动态域名,同时他们会提供一个账号密码,以花生壳为例,在家庭路由器的动态DNS选项中,填入账号密码,如下图:
保存后,每次重新开家庭路由,你都可以不用关心目前对外网IP多少了,因为已经绑定在了你的动态域名上了,你只需要把我们控制端的设置里面把IP部分替换成你的动态域名即可!(注:V1.25版本上位机控制端已经支持动态域名,控制地址处可以直接填入域名。
)
TP-bridge.png(113.16 KB, 下载次数: 51)。