20172018年第二学期(工业机器人基础技术)期末试卷A-B
- 格式:doc
- 大小:237.00 KB
- 文档页数:6
高中2017届第二学期期末教学质量检测
物理试题卷2018.07 本试题卷分第I卷(选择题)和第II卷(非选择题),满分100分,考试时间100分钟。
注意事项:
1.答题前,考生务必将自己的姓名、考号填写在答题卡规定的位置上;
2.答选择题时,必须使用2B铅笔将答题卡上对应题号的答案标号涂黑,如需改动,用橡皮擦干净后,再选涂其它答案标号;答非选择题时,必须使用0.5毫米黑色签字笔将答案书写在答题卡规定的位置上;
3.所有题目必须在答题卡上作答,在试题卷上答题无效;考试结束后,将答题卡交回。
第I卷(选择题共46分)
一、单项选择题:本大题共10个小题,每小题3分,共30分。在每小题给出的四个选项中,只有一个选项是符合题目要求的。
1.下列与曲线运动相关的叙述,准确的是
A.物体做曲线运动时,速度方向一定时刻改变
B.物体运动速度改变,它一定做曲线运动
C.物体做曲线运动时,加速度一定变化
D.物体做曲线运动时,有可能处于平衡状态
2.下列说法准确的是
A.牛顿提出万有引力定律,并利用扭秤实验巧妙地测出了万有引力常量
B.太阳系中,所有行星轨道半长轴的三次方跟公转周期的二次方的比值都相等
C.开普勒借助导师牛顿的丰富观测数据计算并提出了开普勒三大定律
D.相同时间内,地球与太阳的连线扫过的面积等于火星与太阳的连线扫过的面积3.如图所示,A、B是转动跷跷板上的两点,B点离转轴的距离是A点离转轴距离的4倍,设A、B线速度大小分别为v A和v B,角速度大小分别为ωA和ωB,则
CXXA.v A:v B=4:1,ωA:ωB=1:1

2017—2018学年度第二学期期末考试
八年级数学试题
温馨提示:
1.本试卷分第Ⅰ卷和第Ⅱ卷两部分,共4页.满分150分,考试用时120分钟.考试结束后,只收交答题卡.
2.答卷前,考生务必用0.5毫米黑色签字笔将自己的学校、班级、姓名、考试号、座号填写在答题卡规定的位置上.
3.第Ⅰ卷每小题选出答案后,必须用0.5毫米黑色签字笔将该答案选项的字母代号填入答题卡的相应表格中,不能答在试题卷上.
4.第Ⅱ卷必须用0.5毫米黑色签字笔作答,答案必须写在答题卡各题目指定区域内相应的位置,不能写在试题卷上;如需改动,先划掉原来的答案,然后再写上新的答案;不准使用涂改液、胶带纸、修正带.不按以上要求作答的答案无效.
第Ⅰ卷(选择题 共36分)
一、选择题:本大题共12个小题,在每小题的四个选项中只有一个是正确的,请把正确的选项选出来,并将该选项的字母代号填入答题卡的相应表格中.每小题涂对得3分,满分36分.
1.若x 是任意实数,下列各式中一定有意义的是 A.x B.2x C. 2x - D .12-x
2.有下列二次根式:(1)12;(2)5.1;(3)23;(4)3
2.其中能与6合并的是 A .(1)和(2) B .(2)和(3) C .(1)和(3) D .(2)和(4)
3.下列各组数中不能作为直角三角形的三边长的是
A.5 ,5,10
B. 9,12,17
C. 7,24,25
D. 0.6,0.8,1
4.在下列命题中,该命题的逆命题成立的是
A .线段垂直平分线上的点到这条线段两个端点的距离相等
B. 等边三角形是锐角三角形
吉林大学《大学物理(一)》2017-2018学年第二学期期末考试卷
考试形式闭卷
年
月
院系年级专业学号
姓名
成绩
一、填空题:(每空2分,共40分。在每题空白处写出必要的算式)
1、一飞轮的角速度在5s 内由190-⋅s rad 均匀地减到180-⋅s rad ,那么飞轮的角加速度
β=,在此5s 内的角位移θ∆=。
2、两个相互作用的物体A 和B 无摩擦地在一条水平直线上运动,A 的动量为
bt p p A -=0,式中0p 和b 都是常数,t 是时间。如果t=0时B 静止,那末B 的动量
为
;如果t=0时B 的初始动量是-0p ,那末B 的动量为
。
3、光滑的水平桌面上有一长2l ,质量为m 的均质细杆,可绕通过其中点,垂直于杆的竖直轴自由转动,开始杆静止在桌面上,有一质量为m 的小球沿桌面以速度v 垂直射向杆一端,与杆发生完全非弹性碰撞后,粘在杆端与杆一起转动,那末碰撞后系统的角速度ω=
。
4、振幅为0.1m ,波长为2m 的一简谐余弦横波,以1m/s 的速率,沿一拉紧的弦从左向右传播,坐标原点在弦的左端,t=0时,弦的左端经平衡位置向正方向运动,那末弦左端质点的振动方程为
,弦上的波动方程为
。
5、在边长为a 的等边三角形的三个顶点上分别放置一个电量为-q 和两个电量为+q 的点电荷,则该三角形中心点处的电势为
。
6、如图,若V U F C F C F C 100,4,5,10321====μμμ,则电容器组的等效是容C=
,电容器3C 上的电压
3U =
。
7、两个点电荷+q 和+4q 相距为l ,现在它们的连线上放上第三个点电荷-Q ,使整个系统受力平衡,则第三个点电荷离点电荷+q 的距离为;其电量大小
福建工贸学校泉州校区泉州闽南工贸学校
2017—2018学年度第二学期
《工业机器人》A试卷数控大、中印80份满分:100分成绩:
一、填空题28%(每一格1分)
1、机器人的英文名称是:。它是的机器装置,既可以接受人类的指挥,又可以程序,也可以根据技术制定的原则纲领行动。
2、国际标准组织(ISO)为机器人下的定义是:机器人是一
种、位置可控的、具有能力的多功能操作机。3、工业机器人是机器人的一种,是面向工业领域的多关节
或的机器装置。
4、工业机器人按用途可分为机器人、机器人、机器人、机器人等多种。
5、1954年,美国最早提出了工业机器人的概念,并申请了专利。
6、智能机器人不仅具备了能力,而且还具有,
并具有记忆、的能力,因而能够完成更加复杂的动作。
7、工业机器人的机械结构主要由四大部分构成,分别
是、、和。
8、工业机器人的手不仅是一个的机构,它还应该具
有的功能,这就是我们通常所说的“触觉”。
9、夹持式取料手分为三种:、和。
10、夹钳式取料手一般由、、和支架
组成。
11、机器人的手腕是连接和的部件,它的主要
作用是确定手部的作业方向。
二、判断题20%(每题2分)
1、工业机器人是一种能自动控制,可以重复编程,多功能、多自
由度的操作机。()
2、直角坐标机器人具有结构紧凑、灵活、占用空间小等优点,是
目前工业机器人大多采用的结构形式。()
3、工业关节型机器人主要由立柱、前臂和后臂组成。()
4、球面关节允许两边杆之间有三个独立的相对轴动,这种关节具
有三个自由度。()
5、机器人的工作空间是指机器人手臂或手部安装点所能达到的所
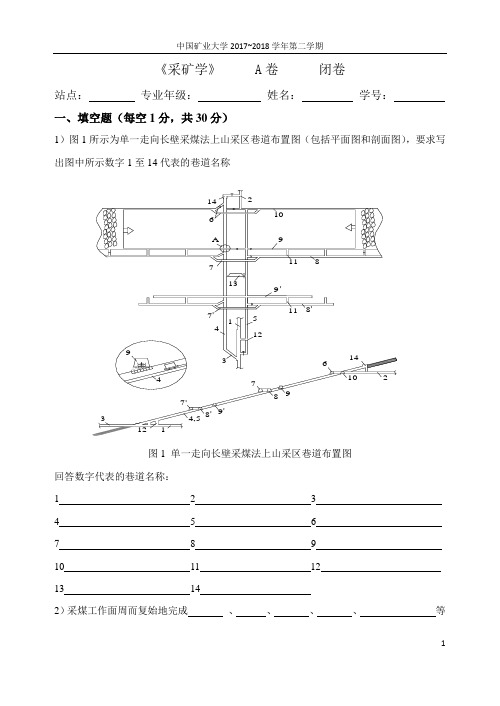
《采矿学》 A卷闭卷
站点:专业年级:姓名:学号:
一、填空题(每空1分,共30分)
1)图1所示为单一走向长壁采煤法上山采区巷道布置图(包括平面图和剖面图),要求写出图中所示数字1至14代表的巷道名称
图1 单一走向长壁采煤法上山采区巷道布置图
回答数字代表的巷道名称:
1 2 3
4 5 6
7 8 9
10 11 12
13 14
2)采煤工作面周而复始地完成、、、、等
工序的过程称为采煤循环。
3)滚筒采煤机的进刀方式有直接推入法进刀、和中部斜切进刀。
4)采煤工艺的类型有、和综合机械化开采三种,其中综采面的主要设备有、和,综采与普采的区别在于工作面支护采用了。
5)在T = Z k/(A×K)的关系式中,T代表,Z k代表矿井可采储量,A 代表,K代表储量备用系数。
6)根据采煤工艺、矿压控制特点和工作面长度不同,采煤方法分为壁式体系和 体系两大类。
7)在缓倾斜煤层中的长壁工作面,炮采工艺方式是指采用落煤、爆破装煤和人工装煤、可弯曲刮板输送机运煤及单体支柱支护的采煤工艺方式。
二、名词解释(每题5分,共30分)
1).采煤方法:
2).及时支护:
滞后支护:
3).采区车场:
4).矿井生产能力:
5).放煤步距(循环放煤步距):
采放比:
6).石门:
三、简答题(共25分)
1).根据第一题填空题图1所示的采矿工程平面图,写出运煤、运料、通风系统(只用数字表示即可,并且新风和污风要分开写)。(6分)
2).煤层上山和岩石上山的比较。写出各自的布置位置、优缺点和适用条件。(8分)
3).简要说明合理井田位置要考虑的因素。(5分)

电机与电气控制2019期末考试试卷A
一、填空题(本题11小题,每空1分,共计30分)
1.直流电动机的结构可分为静止部分和可旋转部分,其中静止部分称
为 ,可旋转部分称为。
2.直流电机的定子在电磁方面是,在机械方面是整个电机的支撑。
3.主磁极上的线圈是用来产生主磁通的,称为绕组。
4.直流电机的励磁方式可分为、、和四类。
5.直流电机的换向不良会产生或环火,严重时将烧毁,导致电机不能正常运行,甚至引起事故。
6.变压器是一种常见的静止电气设备,它是利用原理,将某一数值的交变电压变换为的另一数值的交变电压。
7.变压器不但具有变换和变换的作用,还具有变换的作用。8.某一物理量的实际值与选定的某一同单位的基准值的比值,称为该物理量的或。
9.异步电动机是依靠的变化,来调整电动机的,从而使电动机的得到相应的改变,以适用于负载变化的需要来实现新的平衡。10.是异步电动机的主要特性,它是指电动机的
之间的关系。
11.直流伺服电动机两种控制方式:一种称为控制,另种称为控制
12.步进电动机是一种将信号转换成相应的电动机。13.低压开关电器主要用作、。
14.熔断器是一种主要用作保护的电器。
15.在三相变压器中,额定电流是指电流。
二、计算题(本题3小题,每题10分,共计30分)
1.一台串励直流电动机UN =220V,IN =40A,nN =2000 r/min,电枢总电阻Ra 等于0.50欧姆,假定磁路不饱和,当Ia =20A时,电动机的转速和电磁转矩是多少?
2.某低压照明变压器U1=380V,I1=0.263A,N1=1010匝,N2=103匝,求二次绕组对应的输出电压U2,输出电流I2。该变压器能否给一个80W且电压相当的低压照明灯供电?

40
()()
() 修。()
4、切削运动中,主运动可以是旋转运动,也可以使直线运动。()
5、刀具材料的硬度必须高于工件材料的硬度。()
6、粗加工时,应选用以润滑作用为主的切削液。()
7、切削用量对工件的加工质量无直接影响。()
8、切削用量中,对切削温度影响对大的是切削速度。()
9、切削液能有效减轻刀具、切屑、工件表面之间的摩擦,提高工件表面的加工质量。()
10、游标卡尺应按工件尺寸及精度的要求选用。() 11、千分尺的测量面应保持干净,使用前应校对零位。()
12、不能用千分尺测量毛坯或转动的工件。()
13、常用万能角度尺(Ⅰ型)的测量范围为0o-360o 。()
14、塞尺可以测量温度较高的工件,且不能用力太大。()
15、合理选择划线基准,是提高划线质量和效率的关键。()
16、划线时都应该从划线基准开始。()
17、无论工件上的误差或缺陷有多大,都可采用借料的方法来补救。()
18、圆锉刀和方锉刀的尺寸规格都是以锉身长度来表示的。()
19、当孔的尺寸精度、表面粗糙度要求较高时,应选较小的进给量。()
20、钻孔时,冷却润滑的目的是以润滑为主。() 。 6、千分尺的制造精度分为0级、1级和2级三种,0级精度()。
A 、稍差
B 、一般
C 、最高 7、内径千分尺刻线方向与外径千分尺刻线方向()。 A 、相同B 、相反C 、相同或相反
8、用百分表测量平面时,触头应与平面()。 A 、倾斜B 、垂直C 、水平
9、下图1所示尺寸的读数是()。 A 、5.9mmB 、50.45mmC 、50.18mm 10、下图2所示尺寸的读数是()。 A 、60.26mmB 、6.23mmC 、7.3mm 图1 图2
北京工业大学2017 - 2018学年
第二学期模拟试题参考答案
考试课程:软件设计与体系结构考试日期:2018年06 月12日学院:信息学部(软件学院)专业:软件工程学号:姓名:成绩:
一填空题(共30 空,每空 1 分)
1. 软件或程序是由软件工程人员设计与开发,使计算设备发挥计算潜能,(计算机指令)
的逻辑层次组织。
2. 软件体系结构(Software Architecture)-- 是软件产品设计的思想和系统的蓝图;是
对软件产品(组成要素或单元)的规划和(单元职责)的设置;是定义软件系统组件(Components)或构建块(Building Blocks)的重要工具;用于
-- 实现对一个软件系统的构成进行(逻辑组织结构)的划分
-- 所形成和采用的工程化规范,是指导软件后续过程方方面面组成的模型。
3.软件开发中的面临若干问题:1)软件固有的复杂性;2)软件开发的随意性;3)周期
长,代价高,质量低的问题;软件体系结构设计是软件产品及大型信息系统工程实现中最重要的环节和关键技术之一,解决从软件的(需求分析)到系统实现(代码)的有效和平坦过渡。
4.软件产品的工业化生产:是指建立流水线型的软件产品生产线,是指按(规范化)、标
准化的规范和规则(软件生产规范)来编写和实现各种各样的适应于多环境的软件(组件),通过软件体系结构来确定各个软件组件如何部署到开发架构模式中,组装成达到期望的软件产品。
5.体系结构设计方法的发展中,软件程序开发经历了如下的阶段
-- 功能分解法 (计算任务)
-- 结构化程序设计 (以数据为中心)
得分统计表:
一、填空题(15小题,每小题2分,共30分)
1、操作人员通过使用选择需要的菜单和指令,就可以进行不同种类的作业。
2、用户可使用和操作面板对控制柜进行操作。
3、手腕也叫手臂,手腕的接合部位叫作。
4、视觉零点标定恢复的操作中需要确认的状态已经是“完成”的状态下,才能进行基准测量。
5、调整示教窗口的大小和位置,就是利用进行示教窗口的大小和位置的调整。
6、应用拳头工业机器人视觉零点标定功能时,工业机器人必须处在已经进行了零点标定的状态。
7、EtherNet/IP设定画面的连接号是。
8、EtherNet/lP状态画面中Status(状态)栏显示以下的值表示:-连接无效;ONLINE -连接有效,但不是主动型。
9、DeviceNet从控板仅支持DeviceNet 功能。
10、DeviceNet Interface也具有两种诊断方法:LED显示状态和。
11、工具坐标系的原点位于FANUC机器人J6轴的法兰上,根据需要把工具坐标系的原点移到工作的位置和方向上,该位置叫。
12、工业机器人运动指令记录了位置数据、和运动速度。
13、运动指令的编辑指令中,插入命令为。
14、伺服焊枪手动操作中手动行程是通过操作上所设置的按键来改变伺服焊枪的行程。
15、点焊指令,是向工业机器人发出什么时候、以什么方式进行指示的指令。
二、判断题(10小题,每空2分,共20分)
1、用户可使用示教器和操作面板对控制柜进行操作。()
2、手腕轴视觉零点标定的测量程序的执行不需要在确认“创建测量基准位置”的状态已经是“完成”的

东华大学试卷
2017—2018 学年第 2 学期课号
课程名称C语言程序设计(期末; B 卷)适用班级(或年级、专业)
1. 在程序中可以用来作为变量名的合法的标识符是()
A. void
B. 123
C. #AS
D. a3_b2
2. 以下叙述正确的是()
A. C语言程序总是从第一个定义的函数开始执行
B. 在C语言程序中,要调用的函数必须在main()函数中定义
C. C语言总是从main()函数开始执行
D. C语言程序中的main()函数必须放在程序的开始
3. 若变量均已正确定义并赋值,以下合法的C语言赋值语句是()
A.x=y==5 ;
B. x=n%2.5 ;
C. x+n=i ;
D. x=5=4+1 ;
4.能正确表示a和b同时为正或同时为负的逻辑表达式是()
A.(a>=0||b>=0)&&(a<0||b<0)
B. (a>=0&&b>=0)&&(a<0&&b<0)
C. (a+b>0)&&( a+b<=0)
D. a*b>0
5.设有程序段
int k=10 ;
while(k=0) k=k-1 ;以下描述正确的是()
A. while循环语句执行10次
B. 循环是无限循环
C. 循环体一次也不执行
D. 循环体语句执行一次
6.设整型变量a为5,使b不为2的表达式是()
A. b=a/2
B. b= a%2
C. b=6-(--a)
D. b=a>3 ?2 :1
7.为了判断两个字符串s1和s2是否相等,应当使用()
A. if(s1==s2)
B. if(strcpy(s1,s2))
2017-2018学年度第二学期期末检测试题
高 一 物 理
本试卷选择题10题,非选择题6题,共16题,满分为100分,考试时间90分钟.
注意事项:
1.答卷前,考生务必将本人的学校、班级、姓名、考试号填在答题卡上.
2.将每题的答案或解答写在答题卡上,在试卷上答题无效.
3.考试结束,只交答题卡.
一、单项选择题:本题共6小题,每小题3分,共18分,每小题只有一个选项符合题意.
1.如图所示,质量相等的A 、B 两物块置于绕竖直轴匀速转动的水平圆盘上,两物块始终 相对于圆盘静止,则两物块
A .线速度大小相同
B .角速度大小相同
C .向心加速度大小相同
D .向心力大小相同
2.如图所示,点电荷+Q 固定,点电荷-q 沿直线从A 运动到B .此过程中,两电荷间的库仑力是
A .吸引力,先变小后变大
B .吸引力,先变大后变小
C .排斥力,先变小后变大
D .排斥力,先变大后变小
3.质量为m 的汽车停放在平直的公路上,现以恒定功率P 启动,最终
以某一速度做匀速直线运动.此过程中,车所受阻力大小恒为f ,重力加速度为g ,则
A .汽车的速度最大值为f P
B .汽车的速度最大值为mg
P C .汽车的牵引力大小不变 D .汽车在做匀加速直线运动
4.在下面各实例中,不计空气阻力,机械能不守恒的是
A .做平抛运动的铅球
B .被匀速吊起的集装箱
C .做自由落体运动的小球
D .沿光滑曲面下滑的物体
5.2016年8月16日1时40分,我国在酒泉卫星发射中心用“长征二号”丁运载火箭,成功将世界首颗量子科学实验卫星“墨子”发射升空,首次实现卫星和地面之间的量子通信.“墨子”由火箭发射至高度为500千米的预定圆形轨道.同年6月在西昌卫星发射中心成功发射了第二十三颗北斗导航卫星G7,G7属地球静止轨道卫星(高度约为36 000千米),它使北斗系统的可靠性进一步提高.关于卫星,以下说法中正确的是
2017-2018学年17级第二学期大学英语期末试卷B
江西工业工程职业技术学院2016~2017学年第二学期期末试卷
课程:《大学英语》考试时间: 90分钟
考试使用年级和班级:17级建筑1711(B、闭卷)
Part I. Oral English 20%
Part II. Multiple choice 10%
1. My father bought an antique yesterday, ______was very reasonable.
A. its price
B. the price of which
C. which price
D. the price of whose
2. I want to find a good book. I’m going to the _______.
A. cinema
B. library
C. museum
D. bathroom
3.While shopping, people sometimes can’t help____ into buying something they don’t really need.
A. to persuade
B. persuading
C. being persuaded
D. be persuaded
4. My birthday is _______ November 11th.
A. on
B. in
C. at
D. to
5. We won’t leave here ________ he arrives.
A. after

粤教版小学六年级下册信息技术期末试卷
一、选择题(选择正确答案的番号,每题1.5分,共15分)
1.下列LOGO命令中哪个是前进命令()。
A.FD
B. LT
C. RT
D. BK
2.()是指解决某个问题或执行某项任务时所经历的过程。
A. 程序
B. 流程
C. 过程
D. 结果
3.幻灯片的文件扩展名为( )。
A.htm
B. doc
C. xls
D. ppt
4.()是机器人的重要组成部分,它起到了类似人的感觉器官的作用。
A. 主控器
B.传感器
C.控制器
D. 接收器
5.LOGO语言允许在过程中调用过程,这种方法叫做过程的()
A. 借用
B. 交换
C. 调换
D. 嵌套
6.机器人的能源主要来自光能和()
A热能 B 风能C电能 D 能量
7.用LOGO命令画正方形一共要用()个命令。
A. 4
B. 6
C. 8
D. 10
8. LOGO的基本画笔是()
A.铅笔B小海龟 C.彩色笔 D.圆珠笔
9.在网页中要插入Flash动画,是选择“插入”菜单中的()选项。
A.高级
B.图片
C.表格
D.动画
10.LOGO的默认背景色是()
A.白色
B.红色C蓝色 D.黑色
二、判断题。(判断每小题的正误,对的写“A”,错的写“B”。每小题分,共10分)
1.LOGO语言是科学家们专门为少年儿童开发的。()
2.被定义好的过程是可以修改的,修改过程也必须在编辑窗口中进行。()
3.机器人和人一样有大脑、心脏、手、脚和眼睛这样的“器官”。()
4.1956年,世界上第一个真正意义上的“工业机器人”诞生。()
5.在LOGO世界里,使用快捷按钮栏上的“背景”按钮和“画笔颜色”按钮,我们可以挑选五颜六色的画纸和画笔,画出五彩缤纷的图画。()

《机器人概论》期末试卷
一、填空题
1、(1959)年,第一台工业机器人在(美国)诞生。
2、喷漆机器人主要由机器人(本体)、(计算机)和(控制系统)组成。
3、哈尔滨工业大学、沈阳自动化研究所和中国第一汽车集团公司(合作研制的(HT-100A)点焊机器人于1999年7月正式通过了验收。
4、日本的(雅马哈)、(本田)、(铃木)等摩托车的主要结构件全部采用焊接机器人作业。
5、1998年6月,(法国、意大利、日本)三国共同研制了一种名为Robokid的焊接机器人,它能用激光三角测量法“看”到焊缝,并且可以随时调整焊炬的路线,保证对准焊缝。
6、(2005)年,韩国大宇造船和海事工程公司(DSME)研制成功的(船体真空喷丸机器人)可以自动喷丸船体的外表面。这项发明可以提高生产力,防止污染,减少工人因作业疲劳导致的肌骨骼失调,全面改进船舶的建造质量。
7、日本最早开发的核工业机器人是(单轨的),活动范围很窄,只能对某些核设备进行定向的巡检。
8、在工业机器人产业化的过程中,世界形成了三种不同的发展模式,即(日本模式)、(欧洲模式)和(美国模式)。
9、(阿西布朗勃法瑞集团(ABB))在世界上率先研发出了电力驱动工业机器人和工业喷漆机器人。
10、(1969)年,日本早稻田大学的加藤一郎研发出了世界上第一台以双脚走路的机器人,因此被尊称为(仿人机器人之父)。
11、现代的仿人机器人种类繁多,主要包括(高仿人)形机器人、(多功能人)形机器人、(生化)机器人、(场地)机器人等类型。
12、世界上最早的聊天机器人诞生于(20世纪80年代),这款机器人名为(阿尔贝特),用(BASIC语言)编写而成。
得分统计表:
一、填空题(15小题,每小题2分,共30分)
1、工业机器人系统由工业机器人本体、工业机器人软件系统(或应用工具软件)、构成。
2、操作面板上的按钮开关有急停按钮、、启动按钮、3方式开关。
3、FANUC工业机器人是内嵌在工业机器人控制装置内的各类工业机器人作业专用的软件包。
4、应用拳头工业机器人视觉零点标定功能时,工业机器人必须处在已经进行了零点标定的状态。
5、是安装在工业机器人的关节上的单轴视觉零点标定专用的视觉测量用标记。
6、实际在执行用于手腕轴视觉零点标定的测量时,在上述测量用基准位置和以不同方式改变该姿势角(W、
P、R)而得的共9种工业机器人姿势下进行点阵板的测量。将这9种姿势叫作。
7、EtherNet/IP的I/O可以分配给工业机器人的数字I/O、组I/O、外围设备I/O,如果在扫描仪连接中,还可以分配给。
8、一直以来为了防止Ethernet网络的冲突(collision)。通过使用开关(不是集线器)和,这样可完全防止冲突。
9、DeviceNet Interface也具有两种诊断方法:和系统错误消息。
10、DeviceNet硬件由母板和最多4块构成。
11、运动指令的编辑指令中,查找程序元素命令为。
12、机器人运动类型分为三类,其中Linear为。
13、要进行弧焊,必须在焊接有效状态下,在倍率为下连续执行程序。
14、力觉传感器的安装方式有两种。一种是上的方式,另外一种是固定在工作台上的方式。
15、Arc Tool软件专用指令的弧焊指令包括弧焊开始指令和指令。
二、判断题(10小题,每空2分,共20分)
房山区2019-2019学年度第二学期期末检测试卷
房山区2019——2019学年度第二学期期末检测试卷语文参考答案
2019.5
一、基础·运用(共15分)
1.答案:(1)应将第①段中的“总觉得好像缺点什么?”后的问号(?)改为句号(。)(1分)
(2)应将第①段中的“周敦颐的《爱莲说》读书人不知道的恐怕是大有人在的”中“大有人在”改为“绝无仅有”。(1分)评分:本题2分。(2)改为与“绝无仅有”近似意思的词语即可。
2.答案:点、撇、横、横、竖
评分:本题1分。写成笔顺也可。
3.答案示例:画线句让我联想到了李清照《如梦令》中的“绿肥红瘦”,这里作者变用为“绿肥红肥”,把荷叶长得茂盛、荷
花开的繁盛的景象描写的生动形象,我仿佛看到荷塘上碧绿肥厚的叶子连成一片,数十朵红艳耀目的荷花在风
中起舞,他们的花瓣层层叠叠,被风一吹婀娜地摇摆着身姿。
评分标准:本题3分。①②共1分,③1分,④1分。意思接近即可。
4.答案示例一:选择:B 理由:B幅作品采用流畅自然的行书书体书写“出淤泥而不染,濯清涟而不妖”,能够展示莲花虽
身处污泥却纤尘不染,不随世俗、天真自然不显媚态的可贵精神。
答案示例二:选择:D 理由:D幅作品采用端庄大方的楷书书体书写“出淤泥而不染,濯清涟而不妖”,不仅能够展示莲花身处污泥却端
庄雍容不可亵玩的精神实质,而且作品背景还配有莲花荷叶的图案,图文并茂,适合制作幻灯片。
评分标准:本题3分。按照答案示例一且正确2分;按照答案示例二且正确3分。
5.答案:B
评分:本题2分。
6.答案:B
评分:本题2分。