基于RobotStudio的机器人码垛工作站虚拟仿真设计研究
- 格式:pdf
- 大小:1.56 MB
- 文档页数:2

基于RobotStudio的机器人码垛工作站虚拟仿真设计研究机器人在工业生产中扮演着越来越重要的角色,而机器人码垛工作站作为机器人应用的一种重要形式,因其能够提高生产效率、减少人力成本、保障产品质量等优势,在工业生产中得到了广泛的应用。
为了有效地设计和优化机器人码垛工作站,虚拟仿真技术得到了广泛的应用。
本文基于RobotStudio,对机器人码垛工作站进行了虚拟仿真设计研究,以期为工业生产提供参考与指导。
一、介绍随着机器人技术的不断发展,机器人在现代工业生产中的应用越来越广泛。
机器人码垛工作站是机器人应用的一种典型形式,通常用于将产品从生产线上取下并堆放成垛。
与传统的人工码垛相比,机器人码垛具有自动化程度高、效率高、精度高等优势,能够大大提高生产效率,并减少人力成本。
虚拟仿真技术是一种通过计算机模拟实际系统的运行过程,以便了解系统的行为、优化系统设计和预测系统性能的技术。
在机器人码垛工作站的设计中,虚拟仿真技术能够帮助工程师在设计阶段对工作站进行优化,提前发现潜在问题,减少设计改动,并且提高系统性能。
二、 RobotStudio简介RobotStudio是由ABB公司开发的用于机器人在线编程、离线编程和仿真的软件平台。
它可以模拟ABB机器人的运动、动态行为和传感器反馈,使用户能够在计算机上完整地模拟和验证机器人系统的性能。
RobotStudio不仅可以帮助工程师在设计阶段对机器人系统进行优化,还可以在实际投产前对系统进行验证,从而减少实际投产过程中的风险和成本。
三、机器人码垛工作站虚拟仿真设计研究1. 工作站布局设计在机器人码垛工作站的设计中,工作站的布局是一个重要的环节。
合理的布局可以提高机器人的工作效率,减少机器人的空闲时间,从而提高生产效率。
基于RobotStudio,工程师可以设计不同布局方案,并通过仿真分析各种布局方案下机器人的动作轨迹、碰撞检测等问题,从而选择最优的布局方案。
2. 机器人轨迹规划机器人在码垛过程中的轨迹规划是一个关键环节。

基于RobotStudio的机器人码垛工作站虚拟仿真设计研究1. 引言1.1 背景介绍机器人码垛工作站是一种广泛应用于生产线上的装卸作业的自动化设备。
随着制造业的发展,对于提高生产效率和降低成本的需求也日益增加。
设计一种高效的机器人码垛工作站对于提升生产线的运行效率具有重要意义。
传统的机器人码垛工作站设计往往需要耗费大量的时间和成本进行实际物理布局和测试。
而基于RobotStudio的虚拟仿真设计可以通过计算机模拟实际场景,提前发现潜在问题并进行优化,从而节省时间和成本。
本研究旨在探讨基于RobotStudio的机器人码垛工作站虚拟仿真设计方法,通过对软件介绍、设计原理、仿真方法、实验结果和优化方向的研究分析,从而为工业生产提供更高效、更可靠的解决方案。
通过本研究,可以为制造业的智能化转型提供参考,促进我国制造业的发展。
1.2 研究意义机器人码垛工作站是现代智能制造系统中的重要组成部分,其具有提高生产效率、减少人力成本、提升生产质量等显著优势。
机器人码垛工作站的虚拟仿真设计是对传统机器人系统设计方法的一种革新,能够提前发现潜在问题、降低设计成本、减少现场调试时间,从而加快产品开发周期,提高生产效率。
对于基于RobotStudio的机器人码垛工作站虚拟仿真设计研究,具有重要的现实意义和应用价值。
在工业自动化发展的背景下,机器人技术已成为提高制造业竞争力的关键技术之一,而机器人码垛工作站作为自动化生产线中的重要环节,其设计质量直接影响生产效率和产品质量。
通过对基于RobotStudio的机器人码垛工作站虚拟仿真设计方法的研究,可以提高机器人系统设计的效率和质量,为制造企业提供更好的技术支持。
基于RobotStudio的虚拟仿真设计方法还可以为机器人系统设计提供更多创新思路和解决方案,帮助企业在激烈的市场竞争中保持竞争优势。
本研究的意义在于为机器人码垛工作站的设计与研发提供新的思路和方法,为制造业的智能化转型升级做出贡献。

0引言码垛机器人在工业自动化领域有着广泛的应用。
码垛机器人的使用解除了人们在高强度的劳动作业,缩小产品的堆放空间,提高了企业的利益。
码垛机器人动作灵活精准、快速高效、稳定性高,工作效率高。
因此,码垛机器人成了厂家的优先的选择,本文以物料堆积为研究对象,解决物料箱码垛问题,研究自动化物料箱堆垛起来的码垛机器人仿真系统的构建,实现生产输送链终端自动化,使得生产中获得高效的运行速度和较好的经济价值。
1码垛机器人工作环境及参数要求1.1工作环境本码垛机器人将用于流水线末端物料箱或箱状的物料的平稳搬放和整齐码放,使物料箱的码放更加便捷,在仓库或车间需要实现自动化流水线生产时,节约人力和财力,提高企业生产效率和市场竞争力。
1.2工作空间分析及相关技术参数该码垛机器人主要搬放、码放物料箱或箱状的物料,在这我们根据生产现场实际情况,以通用型物料箱为例,其尺寸长、宽、高分别为600mm*350mm*200mm,重量为20kg。
计划一层放5箱,横3竖2。
然后放在托盘上,托盘尺寸为1700*1300(单位mm),一个托盘放大约1吨,依次叠放至第4层即可,这样放置可以有效防止物料箱倾倒。
码垛范围:800*800*300(长*宽*高)(单位mm),抓手形式:吸取式,工作是将物料箱从传送带末端吸起,放在托盘码放起来。
2本设计码垛机器人的运动形式确定经过对资料的查找的比较以及对视频的学习,选择了最合适的机械手。
在肯定坐标类型方案时,考虑到具体设计要求。
根据码垛机器人的工作环境和任务要求,结合上述各种坐标形式的机械手的特点,选择了旋转关节型机械手。
在工作空间宽度、复杂位移轨迹和姿态控制等方面都优于其类型他机器人。
关节型机器人是以臂部各相邻部件的相对角位移作为运动坐标,动作相对灵活,占地空间小,工作范围大,这种的优势是本次设计研究的机器人所需求的。
3码垛机器人自由度的确定工业机械手的自由度越多,它的作用和应用就越方便。
然而,控制系统和结构越复杂,机器人定位精度越难确定,它的成本价格越高,体重就越大。
基于RobotStudio的机器人码垛工作站虚拟仿真设计摘要:本文介绍了基于RobotStudio的机器人码垛工作站虚拟仿真设计。
该设计主要应用于工厂生产线上的码垛工作,以提高生产效率和产品质量为目标,实现了自动换盒和错误检测的功能。
通过虚拟仿真,可以降低实际建设成本,同时保证设计方案的效果。
本文详细阐述了机器人码垛工作站的整体设计思路、工作流程、仿真模拟结果以及未来的拓展方向。
关键词:RobotStudio;机器人;码垛;自动换盒;错误检测正文:一、研究背景传统的码垛工作需要人工操作,效率低、出错率高,不仅成本高昂,还容易由于操作员的疏忽而造成生产线的瘫痪。
为了提高生产效率和产品质量,采用自动化技术已成为必然趋势。
RobotStudio是ABB公司推出的工业机器人虚拟仿真软件,可以帮助用户预测机器人的运动轨迹,分析生产线的效率和可靠性,降低实际建设成本。
二、设计思路本文设计了一个基于RobotStudio的机器人码垛工作站,其主要包括两个部分:一个是码垛机器人,另一个是物料输送机。
具体的设计思路如下:(1)整体结构设计机器人码垛工作站的整体结构如图1所示,由物料输送机、机器人、工作平台和控制系统组成。
图中的机器人代表一个ABB IRB 4600-45/2.05工业机器人,用于实现对物料进行抓取、码垛和放置等操作。
(2)工作流程设计机器人的工作流程如图3所示,包括三个主要步骤:物料入料、码垛和放盘。
其中,自动换盒和错误检测功能能够保证生产的连续性和稳定性。
(3)错误检测设计为了避免机器人在码垛过程中出现错误,本文设计了一个错误检测系统。
在机器人操作前,摄像头会检测物料的旋转角度和朝向,并通过计算器来判断是否需要调整物料放置的位置和角度。
如果物料在码垛过程中出现了异常,机器人会停止工作并报警。
在这种情况下,人工干预是必要的,例如清理堵塞或重新调整机器输送机的部分。
三、仿真模拟结果利用RobotStudio进行虚拟仿真可以模拟整个机器人码垛工作站的生产流程。
基于 RobotStudio 的机器人码垛工作站虚拟仿真设计研究引言随着工业自动化的不断发展,机器人在生产场景中扮演着越来越重要的角色。
机器人码垛是一项常见的自动化任务,它可以以高效的方式将物品堆叠在一起,节省人力和时间。
在设计码垛工作站时,虚拟仿真是一种十分有效的工具。
本文将探讨基于 RobotStudio 的机器人码垛工作站虚拟仿真设计的研究。
1. RobotStudio 简介RobotStudio 是由全球领先的自动化公司 ABB 开发的一款专业机器人仿真软件。
它提供了一个功能强大的平台,用于设计、优化和验证机器人自动化任务。
RobotStudio 能够模拟真实的生产环境,并能够将其连接到实际的机器人控制系统,实现实时的虚拟仿真。
2. 机器人码垛工作站的设计机器人码垛工作站的设计过程中需要考虑多个方面,包括工作站布局、机器人路径规划、物品堆放策略等。
虚拟仿真可以为设计师提供一个可视化的环境,使其可以在不实际布置物理设备的情况下进行工作站的设计和优化。
使用RobotStudio 进行机器人码垛工作站设计的步骤如下:2.1 创建工作站模型首先,需要在 RobotStudio 中创建一个工作站模型。
这可以通过导入现有的 CAD 文件或者从头开始构建。
工作站模型应包括机器人、物料传送带、码垛区域等。
2.2 添加机器人任务在工作站模型中添加机器人任务,包括从传送带上取货、运输到码垛区域、将物品码垛等。
2.3 设计机器人路径使用 RobotStudio 的路径规划工具,设计机器人在工作站中的路径。
路径应尽可能高效,以最短的时间完成任务。
2.4 优化工作站布局通过不断调整工作站模型和机器人路径,优化工作站布局以提高生产效率。
可以使用 RobotStudio 的仿真功能模拟机器人的运动,以评估不同布局的效果。
2.5 编写控制程序完成工作站的设计后,可以使用 RobotStudio 的控制程序编辑功能编写机器人的控制程序。
基于RobotStudio的机器人码垛工作站虚拟仿真设计研究【摘要】本文通过对基于RobotStudio的机器人码垛工作站虚拟仿真设计的研究,探讨了工作站设计原理、软件介绍、设计流程、仿真结果分析和性能评估等方面。
通过详细的分析与总结,本研究旨在提高码垛工作站的效率和精度,为工业生产提供更好的解决方案。
在未来的研究中,可以进一步优化设计流程并探索更多的应用领域,为机器人技术的发展做出更大的贡献。
本研究还提出了实践应用建议,为工业生产实践提供指导。
通过本文的研究,可以为机器人码垛工作站的设计与优化提供重要的参考和借鉴。
【关键词】- 机器人码垛工作站- RobotStudio- 虚拟仿真设计- 设计原理- 流程分析- 结果分析- 性能评估- 设计总结- 未来研究方向- 实践应用建议1. 引言1.1 研究背景机器人在现代制造业中扮演着越来越重要的角色,其高效、精准、可靠的特性使其成为自动化生产中的关键技术。
码垛工作站作为机器人应用的重要领域之一,广泛应用于各种行业中,如物流、仓储、食品加工等。
传统的码垛工作站设计通常需要大量的人力和时间投入,且存在效率低下、安全问题等诸多不足。
为了克服这些问题,基于RobotStudio的机器人码垛工作站虚拟仿真设计成为了一个热门研究方向。
随着虚拟仿真技术的不断发展和RobotStudio软件在机器人领域的广泛应用,利用虚拟仿真软件对机器人码垛工作站进行设计可以有效降低设计成本、提高设计效率,并能够对设计方案进行全面评估和优化。
开展基于RobotStudio的机器人码垛工作站虚拟仿真设计研究具有重要的实践意义和实际应用价值。
通过深入研究机器人码垛工作站的设计原理和仿真流程,可以为相关领域的工程技术人员提供参考和借鉴,推动相关技术的发展和应用。
1.2 研究目的研究目的主要是通过基于RobotStudio的机器人码垛工作站虚拟仿真设计,实现对机器人码垛工作站的精确设计和性能评估。
基于RobotStudio的机器人码垛工作站虚拟仿真设计研究【摘要】本文基于RobotStudio软件,针对机器人码垛工作站设计展开虚拟仿真研究。
首先介绍了虚拟仿真技术在机器人工作站设计中的应用,并详细解析RobotStudio软件的功能和特点。
接着对机器人码垛工作站设计的需求进行了分析,提出了基于RobotStudio的虚拟仿真设计方法。
通过仿真结果分析,验证了设计方法的有效性,并探讨了未来研究方向。
最后总结了本文的研究工作,为机器人码垛工作站的设计提供了新的视角和方法。
通过本文的研究,可以为提高机器人工作站设计效率和质量提供有力支持。
【关键词】虚拟仿真技术、机器人工作站、RobotStudio软件、码垛、设计方法、仿真结果、有效性验证、未来研究、总结。
1. 引言1.1 研究背景机器人在工业生产中扮演着越来越重要的角色,其在提高生产效率、减少人力成本、提升产品质量等方面有着明显的优势。
码垛工作站作为机器人应用的重要领域之一,其设计和优化对于提高生产线的运行效率至关重要。
而虚拟仿真技术的广泛应用为机器人工作站的设计提供了新的思路和方法。
如今,基于RobotStudio的机器人码垛工作站虚拟仿真设计成为研究热点。
通过在虚拟环境中模拟机器人的运行轨迹、工作站布局以及产品堆垛方式,可以提前发现潜在问题、优化设计方案,达到降低成本、提高生产效率的目的。
目前对于基于RobotStudio的机器人码垛工作站虚拟仿真设计方法的研究还比较有限。
本研究旨在探索如何更有效地利用RobotStudio软件进行机器人码垛工作站的虚拟仿真设计,为工程师提供更好的设计工具和方法。
通过这项研究,我们希望能够推动机器人码垛工作站设计领域的发展,为工业生产带来更多的创新和进步。
1.2 研究意义机器人在工业生产中应用越来越广泛,码垛作为其重要应用之一,对提高生产效率和减少人力成本具有重要意义。
在机器人码垛工作站设计中,虚拟仿真技术可以帮助工程师准确地模拟整个生产过程,提前发现潜在问题,避免实际操作中的错误和风险,降低开发和生产成本。

基于RobotStudio的工业机器人分类码垛工作站仿真设计摘要:随着我国工业的快速增长与发展,机器人设备和工作站的空间、精度需求的日渐提高,工业机器人工作站已经是一种融合了信号控制技术、传感器控制技术、精密传动技术、数字传动控制技术等于一身的综合性高端电子产品,工业机器人工作站的设计也必须充分考虑占用空间、摆放地方等各种因素。
利用工程软件,在虚拟环境中模拟,就能够达到较为合理、经济、高效的配置,从而有效减少风险。
本文以基于RobotStudio的工业机器人分类码垛工作站,开展仿真设计研究。
关键词:RobotStudio;分类码垛工作站;仿真设计在工业生产中,有很多重复的动作,如组装、搬运、包装等。
随着劳动力成本的增加,工程机械设备在这些场合中更为常用,尤其是码垛作业,其重点是最后一道工序的生产,因为产品种类繁多,而且体积小、重量大,使手动操作效率下降,风险更大。
因此,引进工业机器人作为码垛过程,利用它根据预先设定的码垛方式,逐步在生产线上提取原料,再安装到托盘或其他载体上,无须人工作业,这极大地提高了工作效率和稳定性,也大大降低了成本。
对工业码垛机器人而言,若采取示教再现的现场编程方法,会存在准确度低、效率低下、后期维修复杂等问题。
所以,为提高编程效能,使工程师减少危险的运行状况,从而增强编程实力,工业自动化机器人虚拟离线编程得到了广泛应用。
不过许多时候离线编程系统并不能考虑到现实状况,例如性能,堆叠模式等。
主要思路就是通过离线仿真技术构建虚拟机器人的基本运行环境。
在虚拟现实模式下,系统能够引入工业机器人的现实运行状况,同时基本运行系统也能够控制工业机器人在现实环境中运行,从而可以在不同的观察角度上观察工业机器人的实际工作状态。
还能够实现通过引入虚拟机器人的末端执行器在计算机屏幕显示器上的运动,从而才能最终真正实现虚拟机器人的远程控制,并最终可以实现生成一个虚拟工业机器人的一个基本的运行轨迹。
robotstudio机器⼈应⽤实践(码垛搬运⼯作站)实验过程1.创建机器⼈系统使⽤robotstudio中的型号IRB260机器⼈模型。
IRB 260机器⼈主要针对包装应⽤设计和优化,虽机⾝⼩巧,能集成于紧凑型包装机械中,却⼜能满⾜您在到达距离和有效载荷⽅⾯的所有要求。
配以ABB运动控制和跟踪性能,该机器⼈⾮常适合应⽤于柔性包装系统。
速度快——操作周期时间短该机器⼈专为包装应⽤优化设计,配以ABB独有的运动控制功能,⼤⼤缩短了包装周期时间。
精度⾼——零件⽣产质量稳定该机器⼈具有极⾼的精度,再加上ABB卓越的传送带跟踪性能,不论是固定位置操作,还是运动中操作,其拾放精度均为⼀流。
功能强——适⽤范围⼴该机器⼈专为包装应⽤优化设计,体积⼩、速度快、有效载荷⾼达30kg。
通⽤性佳——柔性化集成和⽣产该机器⼈重量轻、⾼度低,便于集成在紧凑型包装机械中。
专门根据包装应⽤进⾏过优化,是机器⼈⾃动化的必然选择。
配有全套辅助设备(从集成式空⽓与信号系统⾄抓料器),可配套使⽤ABB包装软件机械⽅⾯集成简单,编程更是⼗分⽅便。
2.创建动态输送链(1)⾸先选中400型号的传送链,将其放置合适的位置,使得机器臂可以在⾃⼰的⼯作范围内实现物件的抓取和放置,这点很重要,这关系到后期路径选择和⽰教器调试时的效率。
(2)并利⽤robotstudio上强⼤的坐标标定功能,设置好⾓点,使合适⼤⼩的物体能够在传送带上的合适的位置。
(3)接着要在这个传送带上添加合适的smart组件,包括产品源,队列,逻辑门,直线运动的动作等等。
产品源即是我们要使其运动的物品,产品源出来的⼀组数据就是⼀个队列,设置好队列运⾏的动作为直线移动(这⾥要注意设置好直线运动的⽅向,你想向z的正⽅向或者是负⽅向)。
紧接着要设置好停⽌的位置,这时候需要⼀个传感器来使移动的物体停⽌,并设置好传感器上的参数(有两个参数,⼀个active,⼀个sensorout),我们的⽬标是当对象与平⾯相交时使sensorout为⾼电平(注:传送带本⾝是有传感器功能的,但是我们已经设置好了我们所需要的传感器,所以要记得取消传送带上的传感器功能,以免发⽣了⼲扰,会在某⼀个时刻收到两个数据,并注意将传感器拖⼊我们所创建好的smart组件)。
基于RobotStudio的机器人码垛工作站虚拟仿真设计研究1. 引言1.1 研究背景随着制造业的发展和自动化技术的进步,机器人在工业生产中发挥着越来越重要的作用。
而在自动化生产线中,码垛是一个常见的工作流程,主要用于将成品或原材料以特定的方式堆叠在一起。
传统的码垛工作站通常需要大量的人力和时间,而且容易出现误差,影响生产效率和质量。
针对传统码垛工作站存在的问题,采用机器人进行码垛已成为一种趋势。
机器人具有高精度、高速度和稳定性的优势,能够大大提高码垛操作的效率和精度。
基于RobotStudio的机器人码垛工作站虚拟仿真设计成为了研究的热点之一。
通过对机器人码垛工作站进行虚拟仿真设计,可以在实际操作之前通过模拟实验进行测试和优化,从而提高自动化生产线的效率和质量。
本研究旨在通过RobotStudio软件进行机器人码垛工作站的虚拟仿真设计,探索其在实际生产中的应用及优势,为自动化生产线的优化提供技术支持和参考。
1.2 研究目的研究目的:本文旨在通过对基于RobotStudio的机器人码垛工作站虚拟仿真设计研究的探讨,实现以下几个目的:借助虚拟仿真技术,提高机器人码垛工作站设计的效率和精度,减少实际试验所需的时间和成本。
通过对仿真结果的分析,优化工作站的设计方案,提升机器人操作的稳定性和准确性。
通过研究技术创新点,寻求在机器人码垛工作站设计领域的突破和进步,推动行业发展。
通过总结研究成果并展望未来,为相关领域的研究和实践提供有益参考,促进技术应用与创新,推动工业智能化发展。
通过以上目的的实现,将为提高机器人操作效率和品质,优化生产工艺流程,实现智能制造提供理论支持和实践指导。
2. 正文2.1 RobotStudio软件介绍RobotStudio是由瑞士ABB公司开发的机器人离线编程和虚拟仿真软件。
它可以帮助用户在计算机上创建、模拟和优化机器人工作站,提升工程效率,并降低项目开发成本。
该软件支持多种类型的ABB机器人,用户可以轻松地在软件中创建机器人的模型,并进行路径规划、碰撞检测等操作。

基于RobotStudio的机器人码垛工作站虚拟仿真设计研究作者:孙红英来源:《科技资讯》2019年第21期摘; 要:在机器人仿真方面,RobotStudio得到了有效运用。
基于这种认识,该文采用RobotStudio对机器人码垛工作站的虚拟仿真设计方法进行了分析,完成了工作站的布置,对输送链组件设计和信号连接方法展开了探讨,并完成了信号板卡和工作站的工作逻辑设计,最终实现了机器人的控制仿真。
从仿真结果来看,设计的工作站能够顺利完成码垛作业,并且作业效率较高,旨在为有关人士提供参考与借鉴。
关键词:RobotStudio; 机器人码垛工作站; 虚拟仿真设计中图分类号:TP391 ; ;文献标识码:A 文章编号:1672-3791(2019)07(c)-0025-02在现代工业中,机器人得到了广泛应用。
在生产包装线上,码垛机器人属于后续设备,能够按照预定编组将产品码放在托盘或箱体内,实现产品高效运转和生产。
但就目前来看,机器人码垛工作站设计普遍存在效率低和精度低的问题,无法满足实际生产需求。
因此,还应加强机器人码垛工作站的虚拟仿真设计,以便通过观察机器人动作加强机器人控制。
1; RobotStudio虚拟仿真软件RobotStudio虚拟仿真软件由ABB公司开发,属于PC软件,能够在各类ABB工业机器人上适用,实现机器人单元建模、离线创建和虚拟仿真分析。
实际进行机器人系统设计时,采用该软件进行离线仿真,能够对设计出的系统进行试运行。
利用软件,能够实现CAD文件的导入,并且实现路径自动生成和自动分析伸展,完成碰撞检测和模拟仿真,从而为系统二次设计提供支持[1]。
此外,软件提供的工业机器人环境能够与真实环境相对应,因此采用软件建立工作站和进行机器人调试能够完成实际应用验证。
2; 基于RobotStudio的机器人码垛工作站虚拟仿真设计2.1 工作站布局分析采用RobotStudio进行机器人码垛工作站布局,可以PLC为核心控制模式,将控制柜放置在仅靠生产线外围栅栏的外侧。
目录摘要 (I)Abstract (II)第一章绪论 (1)1.1设计背景 (1)1.2国内外研究现状 (1)1.3发展趋势 (6)1.4研究内容 (6)第二章模型平台是的搭建 (8)2.1码垛机器人工作站组成 (8)2.2零部件选型设计 (8)2.3码垛机器人夹具 (10)2.31码垛机器人夹具设计 (10)2.32码垛机器人工具模型的安装及坐标建立 (11)2.4托盘及其摆放设计 (12)2.41托盘模型设计 (12)2.42托盘摆放设计 (13)2.5本章小结 (14)3.1工作流程 (15)3.2smart组件设计 (16)3.21夹具动态smart组件 (16)3.22传送带动态smart组件 (16)3.3关联I/O信号 (17)3.31夹具信号 (17)3.32传送带信号 (19)3.4本章小结 (21)第四章RAPID语言编写 (22)4.31示教目标点 (23)基于Robotstudio的机器人码垛工作站虚拟仿真设计研究4.32姿态调整 (24)4.33碰撞监控 (24)4.4程序编制 (25)4.41Rapid程序组成 (25)4.42程序内容 (25)4.5本章小结 (28)第五章总结与展望 (29)5.1论文工作总结 (29)5.2研究工作展望 (29)参考文献 (31)附录 (32)致谢 (34)基于Robotstudio的机器人码垛工作站虚拟仿真设计研究摘要:随着中国制造业的高速增长和发展,传统工业面临着技术进步和市场需求两大难题。
我国近些年来对于机器人设备及工作站的空间、精确度要求日益攀升,工业机器人工作站是一项结合了信息控制技术、传感控制技术、精密传动技术、数字传送操控技术等于一体的综合性高端产品,机器人工作站的设计需要考虑占地空间、摆放位置等因素。
借助工程软件,在虚拟环境中仿真,可以获得更加合理、经济、有效的配置,有效降低风险。
本文以机器人码垛工作站为研究对象,进行机器人码垛工作站的设计与仿真。

基于RobotStudio的码垛机器人智能工作站仿真的探究作者:李勇来源:《科技资讯》2018年第28期摘要:在一些工业领域当中,为了能够良好地将货物存放或者放置到指定位置堆叠,需要进行码垛,然而传统码垛工作主要由人工执行,那么随着货物重量、搬运要求的增长与变化,人工因为自身能力所限,无法满足码垛需求,此时为了能够良好地进行码垛工作,就需要采用码垛机器人来进行作业。
本文主要在RobotStudio基础上,对码垛机器人以及智能工作站进行分析。
关键词:RobotStudio 码垛机器人智能工作站中图分类号:TP24 文献标识码:A 文章编号:1672-3791(2018)10(a)-0031-02码垛机器人的运作是受到智能工作站的管制,管制决策由人工根据机器人运行的状态来决策,但是在决策之前,相关人员往往会借助仿真软件,对码垛机器人的运行生产线各阶段进行仿真,再根据仿真结果来分析码垛机器人运行是否存在潜在问题,此举能够有效提高码垛机器人的工作效率,并且降低开发成本,因此有必要在使用码垛机器人之前进行相关的仿真研究。
1 智能化生产线模型构建本研究将以PLC作为控制核心,之后进行码垛机器人选型,主要选择ABB-IRB2600型号机器人,其工作有效范围为1.65m,承重载荷达12kg[1]。
ABB-IRB2600型号机器人结构简单,其工作端安置了真空吸盘,吸盘可以吸住周转箱,保障码垛过程中货物的安全[2]。
2 传输链Smart组件添加与连接2.1 Smart组件概述Smart组件是RobotStudio的一种仿真功能,专门用于仿真模拟ABB型号机器人,因此在本研究基础上具有良好的应用价值[3]。
在本文中,通过Smart组件实现了货物在传输链当中的动态模拟。
2.2 传输链Smart组件添加首先添加源组件(Sourse)来实现货物的复制,同时结合队列(Queue)来执行货物复制命令,在此两项运作之下,使得所有货物都具备了相同的动态属性。
信 息 技 术DOI:10.16661/ki.1672-3791.2019.21.025基于RobotStudio的机器人码垛工作站虚拟仿真设计研究孙红英(兰州石化职业技术学院 甘肃兰州 730060)摘 要:在机器人仿真方面,RobotStudio得到了有效运用。
基于这种认识,该文采用RobotStudio对机器人码垛工作站的虚拟仿真设计方法进行了分析,完成了工作站的布置,对输送链组件设计和信号连接方法展开了探讨,并完成了信号板卡和工作站的工作逻辑设计,最终实现了机器人的控制仿真。
从仿真结果来看,设计的工作站能够顺利完成码垛作业,并且作业效率较高,旨在为有关人士提供参考与借鉴。
关键词:RobotStudio 机器人码垛工作站 虚拟仿真设计中图分类号:TP391 文献标识码:A 文章编号:1672-3791(2019)07(c)-0025-02在现代工业中,机器人得到了广泛应用。
在生产包装线上,码垛机器人属于后续设备,能够按照预定编组将产品码放在托盘或箱体内,实现产品高效运转和生产。
但就目前来看,机器人码垛工作站设计普遍存在效率低和精度低的问题,无法满足实际生产需求。
因此,还应加强机器人码垛工作站的虚拟仿真设计,以便通过观察机器人动作加强机器人控制。
1 RobotStudio虚拟仿真软件RobotStudio虚拟仿真软件由ABB公司开发,属于PC软件,能够在各类ABB工业机器人上适用,实现机器人单元建模、离线创建和虚拟仿真分析。
实际进行机器人系统设计时,采用该软件进行离线仿真,能够对设计出的系统进行试运行。
利用软件,能够实现CAD文件的导入,并且实现路径自动生成和自动分析伸展,完成碰撞检测和模拟仿真,从而为系统二次设计提供支持[1]。
此外,软件提供的工业机器人环境能够与真实环境相对应,因此采用软件建立工作站和进行机器人调试能够完成实际应用验证。
2 基于RobotStudio的机器人码垛工作站虚拟仿真设计2.1 工作站布局分析采用RobotStudio进行机器人码垛工作站布局,可以PLC为核心控制模式,将控制柜放置在仅靠生产线外围栅栏的外侧。
基于RobotStudio的码垛机器人智能工作站仿真研究王功亮;王好臣;李振雨;李家鹏【摘要】Aiming at the production lines simulation performance of industrial robots in intelligent factory construction, the practical applica-tion of ABB robot simulation software RobotStudio in palletizing production line was proposed, and its aspects of add transport chain Smart component, the property settings, creation and connection of robot I/O signal, off-line programming were studied. The robot end sucker was modeled based on three-dimensional modeling software such as SolidWorks/Pro-E, and was imported into RobotStudio, then the conveyor chain, robot control cabinet and other components were added, so the entire production line layout was completed;the work station logical of the robot and conveying chain were connected and set, the communication and connection were established, the workstation simulation of pal-letizing robot was completed. The results indicate that:a palletizing production line need to configure 4 groups of digital input and output sig-nals of the robot, the robot simulation program can be synchronized to the actual production process, the method used in the simulation process of palletizing robot that can also be used for other industrial robot production line simulation.%针对工业机器人在智能化工厂建设中生产线仿真存在的问题,提出了ABB机器人仿真软件RobotStudio在码垛生产线中的实际应用,对输送链Smart组件的添加及属性设置、机器人I/O信号的创建和连接、机器人离线编程等方面进行了研究.利用Solid-Works/Pro-E等三维建模软件对机器人末端吸盘进行了三维实体建模,并导入到RobotStudio,添加了输送链、机器人控制柜等部件,从而完成了整个生产线的空间布局;进行了机器人和输送链之间的工作站逻辑关系连接与设定,建立了两者之间的通讯与连接,完成了码垛机器人工作站的仿真.研究结果表明:一条码垛生产线需要在机器人中配置4组数字型输出输入信号,仿真过程中的机器人程序可以同步到实际的生产过程中;对码垛机器人仿真过程中用到的方法,也可用于对其他用途的工业机器人生产线仿真.【期刊名称】《机电工程》【年(卷),期】2017(034)011【总页数】4页(P1359-1362)【关键词】机器人;离线编程;智能化【作者】王功亮;王好臣;李振雨;李家鹏【作者单位】山东理工大学机械工程学院,山东淄博255000;山东理工大学机械工程学院,山东淄博255000;山东理工大学机械工程学院,山东淄博255000;山东理工大学机械工程学院,山东淄博255000【正文语种】中文【中图分类】TP24工业机器人作为智能化工厂的重要组成部分,在智能化工厂的建设中,发挥着举足轻重的作用。
基于RobotStudio的码垛机器人智能工作站仿真的探究李勇摘要:在一些工业领域当中,为了能够良好地将货物存放或者放置到指定位置堆叠,需要进行码垛,然而传统码垛工作主要由人工执行,那么随着货物重量、搬运要求的增长与变化,人工因为自身能力所限,无法满足码垛需求,此时为了能够良好地进行码垛工作,就需要采用码垛机器人来进行作业。
本文主要在RobotStudio基础上,对码垛机器人以及智能工作站进行分析。
关键词:RobotStudio 码垛机器人智能工作站TP24 :A :1672-3791(2018)10(a)-0031-02码垛机器人的运作是受到智能工作站的管制,管制决策由人工根据机器人运行的状态来决策,但是在决策之前,相关人员往往会借助仿真软件,对码垛机器人的运行生产线各阶段进行仿真,再根据仿真结果来分析码垛机器人运行是否存在潜在问题,此举能够有效提高码垛机器人的工作效率,并且降低开发成本,因此有必要在使用码垛机器人之前进行相关的仿真研究。
1 智能化生产线模型构建本研究将以PLC作为控制核心,之后进行码垛机器人选型,主要选择ABB-IRB2600型号机器人,其工作有效范围为1.65m,承重载荷达12kg[1]。
ABB-IRB2600型号机器人结构简单,其工作端安置了真空吸盘,吸盘可以吸住周转箱,保障码垛过程中货物的安全[2]。
2 传输链Smart组件添加与连接2.1 Smart组件概述Smart组件是RobotStudio的一种仿真功能,专门用于仿真模拟ABB型号机器人,因此在本研究基础上具有良好的应用价值[3]。
在本文中,通过Smart组件实现了货物在传输链当中的动态模拟。
2.2 传输链Smart组件添加首先添加源组件(Sourse)来实现货物的复制,同时结合队列(Queue)来执行货物复制命令,在此两项运作之下,使得所有货物都具备了相同的动态属性。
其次,通过线性运动组件(Linear-Mover)对货物与机器人传感器接触进行控制,即当货物运行到传输链末端之后,货物会与传感器相互接触,此时传感器会发出相应的信号,此部分传感器为面传感器(Plane Sensor)。
基于RobotStudio的机器人码垛工作站仿真与优化研究李敏
【期刊名称】《科技创新与生产力》
【年(卷),期】2024(45)5
【摘要】工业机器人码垛应用非常普遍,利用ABB工业机器人仿真软件RobotStudio,搭建了一个简单码垛工作站,完成了整个工作站的布局。
同时,通过软件中的建模功能和工具创建功能,实现了工业机器人末端执行器的设计。
接着,完成了工作站中末端执行器的动态smart组件功能、系统的I/O设置与连接,以及整个工作站的程序设计与分析。
最后,在不同机器人TCP运行速度下进行工作站仿真,将运行时间、速度运行轨迹和机器人能耗进行对比分析,从而选择较优的TCP运行速度。
该仿真设计,能有效地为实际码垛工作站的优化提供有效参考和理论依据,从而减少调试时间和研究成本。
【总页数】5页(P127-130)
【作者】李敏
【作者单位】湖南财经工业职业技术学院智能制造学院
【正文语种】中文
【中图分类】TP242
【相关文献】
1.基于RobotStudio的机器人码垛工作站仿真研究
2.基于RobotStudio的机器人码垛工作站虚拟仿真设计研究
3.基于Robotstudio的码垛机器人工作站构建的仿真研究
4.基于RobotStudio的搬运码垛机器人仿真工作站设计与研究
因版权原因,仅展示原文概要,查看原文内容请购买。
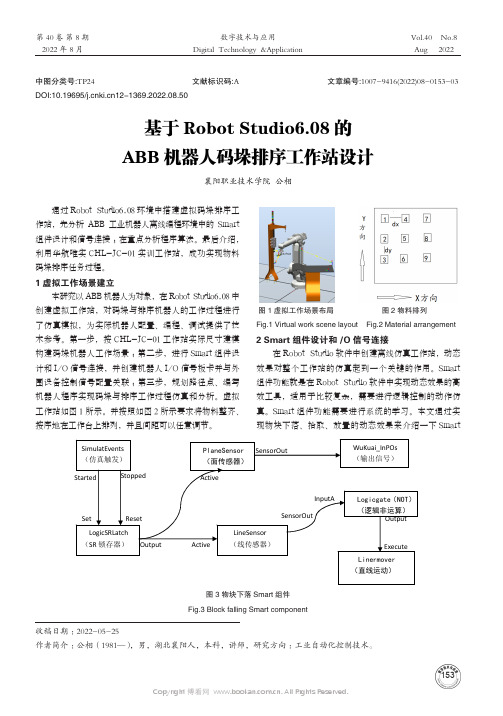

ABB 工业机器人码垛工作站的仿真研究发布时间:2022-01-12T02:23:45.886Z 来源:《现代电信科技》2021年第13期作者:王小良[导读] 人工智能是未来的发展趋势,机器人的应用逐步代替人力劳动。
在工业生产中,无人工厂已逐渐完善,工业机器人随处可见[1]。
(广东科技学院机电工程学院广东东莞 523083)摘要:本文介绍了利用 RobotStudio 软件对 ABB 工业机器人进行码垛运动仿真模拟。
通过 smart1 组件来实现物料的传送, smart2 组件来实现物料的抓取及放置。
通过信号配置及属性连接来关联机器人的信号,最后在示教器中编写机器人主程序及相关例行程序来实现码垛仿真运动。
关键词: RobotStudio;ABB 工业机器人;码垛工作站; smart 组件引言人工智能是未来的发展趋势,机器人的应用逐步代替人力劳动。
在工业生产中,无人工厂已逐渐完善,工业机器人随处可见[1]。
但国内机器人技术起步晚,还有很大的发展空间。
因此,对工业机器人的研究有着重要意义。
由于实体机器人价格昂贵、数量有限,直接应用实体机器人进行编程调试有着很大局限性。
因此,利用 RobotStudio 软件对实体机器人的运动进行仿真模拟是一种有效方式[2]。
本文主要是在 RobotStudio 软件中搭建工业机器人码垛工作站,实现仿真效果。
本工作站的任务是使用输送机连续送出三个盒子工件,工件在输送机末端依次到位后输送机停止运转,然后通过工业机器人携带的吸盘工具抓取这三个工件,最后在物料盘上实现码垛效果。
如下图 1所示。
图 1 工业机器人码垛工作站首先需在虚拟工作站中创建实现码垛动作效果的设备,如输送产品的输送线主要由 smart1 组件来实现,夹取和搬运工件的工具主要由 smart2 组件来实现,然后需要将设备的动作和机器人的信号相关联,实现通过虚拟机器人系统控制设备运行的效果。
最后需要进行创建程序数据目标点示教,编写主程序及相关例行程序,通过主程序的调用,关联各例行程序来实现机器人的码垛仿真运动。
信 息 技 术DOI:10.16661/ki.1672-3791.2019.21.025基于RobotStudio的机器人码垛工作站虚拟仿真设计研究孙红英(兰州石化职业技术学院 甘肃兰州 730060)摘 要:在机器人仿真方面,RobotStudio得到了有效运用。
基于这种认识,该文采用RobotStudio对机器人码垛工作站的虚拟仿真设计方法进行了分析,完成了工作站的布置,对输送链组件设计和信号连接方法展开了探讨,并完成了信号板卡和工作站的工作逻辑设计,最终实现了机器人的控制仿真。
从仿真结果来看,设计的工作站能够顺利完成码垛作业,并且作业效率较高,旨在为有关人士提供参考与借鉴。
关键词:RobotStudio 机器人码垛工作站 虚拟仿真设计中图分类号:TP391 文献标识码:A 文章编号:1672-3791(2019)07(c)-0025-02在现代工业中,机器人得到了广泛应用。
在生产包装线上,码垛机器人属于后续设备,能够按照预定编组将产品码放在托盘或箱体内,实现产品高效运转和生产。
但就目前来看,机器人码垛工作站设计普遍存在效率低和精度低的问题,无法满足实际生产需求。
因此,还应加强机器人码垛工作站的虚拟仿真设计,以便通过观察机器人动作加强机器人控制。
1 RobotStudio虚拟仿真软件RobotStudio虚拟仿真软件由ABB公司开发,属于PC软件,能够在各类ABB工业机器人上适用,实现机器人单元建模、离线创建和虚拟仿真分析。
实际进行机器人系统设计时,采用该软件进行离线仿真,能够对设计出的系统进行试运行。
利用软件,能够实现CAD文件的导入,并且实现路径自动生成和自动分析伸展,完成碰撞检测和模拟仿真,从而为系统二次设计提供支持[1]。
此外,软件提供的工业机器人环境能够与真实环境相对应,因此采用软件建立工作站和进行机器人调试能够完成实际应用验证。
2 基于RobotStudio的机器人码垛工作站虚拟仿真设计2.1 工作站布局分析采用RobotStudio进行机器人码垛工作站布局,可以PLC为核心控制模式,将控制柜放置在仅靠生产线外围栅栏的外侧。
工作站的产品码垛采用ABB-IRB2600码垛机器人,在1.65m范围内工作,承重能够达到12kg。
在末端执行机构上进行真空吸盘的安装,能够对周转箱进行吸取,然后利用滚轮式输送链实现产品的传送。
在产品达到传送末端后,利用传感器实现信号检测,然后反馈给机器人,能够实现真空置位,完成产品吸取[2]。
按照要求完成足够数量产品输送后,机器人将发出停止动作信号,由AGV 小车将空托盘运走,然后进行下一阶段的工作。
2.2 输送链组件设计在对输送链进行虚拟仿真设计时,需要采用Sma r t 组件,其能够实现传输链中货物的动态模拟。
采用RobotStudio进行该组件的添加,能够完成货物复制,然后根据队列Queue进行货物复制命令的执行,确保所有货物拥有相同动态属性。
利用线性运动组件Linear-Mover,能够实现传感器接触控制。
在货物达到传输链末端时,其将与传感器接触,进行相应信号的发送。
采用面传感器Plane Sensor,能够实现这部分功能仿真。
对Logic Gate[NOT]逻辑反组件进行添加,能够进行信号取反操作。
实际上,ABB型号机器人在信号实现高频和低频切换时不会产生动作,所以将导致码垛运行受到影响。
进行取反操作,可以保证机器人正常动作,因此可以完成码垛动作仿真。
2.3 输送链信号连接在输送链信号连接方面,可以采用Smart组件进行信号连接。
在实际操作时,还要先完成信号设置,然后进行信号连接。
首先,需要将I/O信号当成是基础,在周转箱和货物托盘位置进行信号放置。
此时,信号初始值为0,作用端位于小车和机器人上。
根据传输链信号和逻辑值,可以进行信号连接,即完成工作站信号创建,实现组件信号交互。
具体来讲,就是要先完成Simulation Event组件创建,然后进行脉冲信号发送,对Logic SR Latch进行置1。
传感器完成信号状态检测后,系统将生成复制产品,进行入队操作执行。
在传感器接触后,会接收到货物信号,并发出停止信号,实现出队操作和信号传递。
在InPos获得检测信号后,机器人将自动取件。
2.4 机器人信号板卡设计在信号板卡设计方面,还要采用DSQC652通讯板卡,通过在机器人中安装实现信号通讯连接。
板卡数字量为16进16出,总线地址为10。
在机器人与外围I/O信号连接过程中,需要完成I/O板块设置,总计完成机械人吸盘动作控制信号、更换托盘触发数据恢复信号、输送链末端及工位托盘检测到位信号这4个输入输出数字信号的设置。
2.5 工作站工作逻辑在机器人工作方面,还应完成工具坐标系及载荷的设置,然后实现机器人和输送链信号连接,对仿真选项25 科技资讯 SCIENCE & TECHNOLOGY INFORMATION信 息 技 术助决策,并通过数字化模型进行对于水利资源的基础性监控,同时运用遥感技术进行统一的标准要求,实现对于数据收集、数据交换、数据分析等相关的科学性监控。
3 现代信息技术对于水利工程管理发挥的价值3.1 促进了对于水利工程的科学化管理就目前来看,对于水利工程以及相关水情的资源信息进行采集、输送等最终的目的便是要实现对于采集信息的科学性判断,从而做出正确的判断,传统的水利工程技术管理模式不仅仅在信息技术的采集当中存在滞后性,而且还受到了人为的主观因素影响,很容易造成对于水利工程建设的判断失误。
而采用了现代的信息技术以后,便可以通过信息技术实现采集、传送、决策的全自动化准确判断。
比如在对于水利工程的信息管理当中,就能充分实现水利工程的相关管理,从而制定出科学的水利工程建设管理方案,为预防相关问题提供科学的依据。
3.2 实现对于相关水域的管理与信息化服务通过现代电子信息技术可以在一定程度上将各种水利信息资源通过计算机网络平台进行整合,并从电脑所建立的网络模型当中找到最佳的解决方案,实现了由信息技术采集、传送、储存、决策的全过程自动化管理与综合化服务,从而进一步简化了人工操作的环节,运用到信息技术当中可以依托在现代信息技术管理平台自主地选择自身的工程对所需要的相关信息,从而不再受到时间、空间、地点等方面的阻碍。
比如,在我国的农田水利工程技术的应用中,可以通过相关的信息技术随时随地了解到农田的基础信息,从而通过信息网络自动生成科学的决策化并供水利工作者所使用。
3.3 提高了对于水利工程资源的优化配置传统的水利工程建设并没有很好地利用到水资源,但是水利工程建设的最大作用便是实现对于水域,水资源的相关管理,而就目前随着我国日趋用水紧张的局面,必须要求在开发水资源的同时注重对于水资源的有效配置,同时水资源的优化配置对水资源信息管理做出了更高的要求。
要能够通过在线的监控与管理实现对于资源的合理分配,还要能够了解周围的环境对水资源的影响因素,面对复杂、繁琐的分配任务与信息,通过信息技术可以实现对于资源的合理配置与优化,推动水利工程建设。
4 结语在水利工程的实践当中,要充分运用到现代的信息化技术,要不断采取新的技术化管理,采取新技术、新工艺。
既要借鉴先进的技术和成功经验,又要考虑到对于水利工程的综合化管理,只有这样,才能在水利工程信息管理中做得越来越好,走得越来越远。
参考文献[1] 吴庆林.信息技术在水利工程建设管理中的应用[J].水利规划与设计,2014(7):8-10.[2] 林代桂.试论信息技术在水利工程建设管理中的运用[J].江西建材,2016(6):140.[3] 李蕾.浅谈在水利工程建设管理中信息技术的应用[J].建设科技,2016(17):93.下工作站逻辑按钮进行点击。
实际设计时,需要采用默认坐标系tool,然后沿着Z轴向正方向偏移100mm,得到trans[0,0,100]坐标系原点,重心cog为[0,0,90],负载重10kg[3]。
利用LoadIdentify,能够进行工具载荷和工作重心自动测算。
在机器人完成产品吸取后,重心相对tGrip来讲沿着Z轴正方向偏移约50mm,利用LoadIdentify能够进行有效载荷测算,得到空负载数据。
通过实现负载数据合理设置,能够使机器人保持平稳运行,使其使用寿命得到延长。
为简化程序编写,还应将pHome设置为机器人安全等待位置,选用默认wobj0工件坐标系,将输送链末端产品位置设定为pPick,示教工具坐标系为tGrip,栈板位置为pBase。
针对示教点意外的路径,需要利用程序执行加强控制,对合理姿态进行配置。
采用偏移算法,能够对栈板位置变动进行确认,如果位置处于基准位置,可以确定栈板奇、偶层的摆放姿态。
在完成机器人和输送链信号连接后,确定产品到位,输送链能够将信号传递给输入信号diBoxInPos/diPalletInPos,然后执行运行程序,直至达到吸取位置。
在吸取前,需要提前0.2s实现置位真空,实现信号建立,然后在延迟0.5s后进行产品完全吸取,最后放置产品。
在工作站的逻辑源信号和目标信号之间,存在对应逻辑关系,如源信号为doGrip,对应目标信号为diVacuum,能够体现出源对象PalletizeSys和目标对象SC工具的逻辑关系。
将编辑好的程序输入PC机,然后向控制器传送,能够实现机器人动作控制。
2.6 工作站虚拟仿真分析按照上述方法完成机器人码垛工作站的虚拟仿真设计后,对工作站工作进行虚拟仿真分析,可以先完成I/O 通信、搬运工具坐标系、组件运用等内容的设置,然后对RobotStudio的仿真运行按钮进行点击。
在仿真过程中,可以要求机器人完成一个托盘产品装运,进行5×4结构码垛,并且进行碰撞检测。
从仿真结果来看,机器人需要90s将托盘装满,加上用AGV小车更换托盘的时间,总计需要100s。
在整个过程中,各执行对象不会发生碰撞。
在一个工作循环中,需要花费190s。
如果按照8h/d工作制度,将完成150个托盘装载,因此能够使生产效率得到显著提升。
3 结语综上所述,在机器人码垛工作站设计中,采用Robot Studio进行虚拟仿真设计,能够通过调用相应组件完成工作站布局和仿真,实现工作站的准确组建。
直接进行编程结果的查找,能够发现机器人动作存在的问题,然后通够人工修正实现机器人调试,为工作站的设计提供科学依据。
参考文献[1] 黄明鑫,惠为东.基于RobotStudio的机器人码垛工作站仿真研究[J].南方农机,2018,49(23):43-44,51.[2] 李勇.基于RobotStudio的码垛机器人智能工作站仿真的探究[J].科技资讯,2018,16(28):31-32.[3] 郝翠霞,叶晖.基于Smart组件的工业机器人码垛仿真设计[J].自动化技术与应用,2018,37(8):63-66.(上接24页)26科技资讯 SCIENCE & TECHNOLOGY INFORMATION。