STAR MPS光机电一体化自动装配实训系统(STAR OME-AA).
- 格式:doc
- 大小:315.50 KB
- 文档页数:8


光机电一体化实训装置操作流程1.打开光机电一体化实训装置的电源开关。
Turn on the power switch of the integrated training device for optoelectronics.2.等待实训装置系统自检完成。
Wait for the training device system self-check to complete.3.选择需要进行实训的光机电一体化实验项目。
Select the optical-electrical integration experiment project for training.4.准备相关的光学元件和电子元件。
Prepare the relevant optical and electronic components.5.将光学元件安装到实训装置的光路系统中。
Install the optical components into the optical path system of the training device.6.连接电子元件到实训装置的电路系统中。
Connect the electronic components to the circuit system of the training device.7.调整光学元件的位置和角度。
Adjust the position and angle of the optical components.8.检查电子元件的连接是否正确。
Check if the electronic components are connected correctly.9.打开实训装置的控制软件。
Open the control software of the training device.10.设置实验参数和目标数值。
Set the experimental parameters and target values.11.开始运行光机电一体化实验项目。

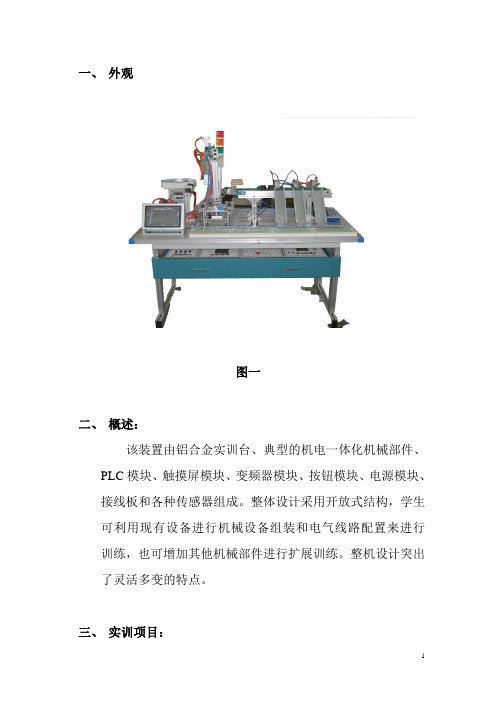
一、外观图一二、概述:该装置由铝合金实训台、典型的机电一体化机械部件、PLC模块、触摸屏模块、变频器模块、按钮模块、电源模块、接线板和各种传感器组成。
整体设计采用开放式结构,学生可利用现有设备进行机械设备组装和电气线路配置来进行训练,也可增加其他机械部件进行扩展训练。
整机设计突出了灵活多变的特点。
三、实训项目:1.自动检测技术使用实训2.气动技术应用实训3.可编程控制器编程实训4.电气控制电路实训5.变频器应用技术实训6.触摸屏应用技术实训7.自动控制技术教学与实训8.机械系统安装与调试实训9.系统维护与故障检测实训四、系统配置:该系统配置了触摸屏模块、可编程控制器(PLC)模块、变频器模块、电源模块、按钮模块、气动装置、光电开关、光纤传感器、接近开关、报警灯、接线板等电器元件,另外还配备了机械手、传送带机构、旋转上料盘、物料分拣机构和落料滑道等机械部件。
在接线方面采取了开放式的安全导线连接的方式,既保证了系统的可灵活配置的特点又保证了学生的实训安全。
系统详细配置清单如下:五、技术参数:1、交流电源:三相AC380V/50HZ。
2、电源形式:三相五线制。
3、外形尺寸:长*宽*高=1260*810*8004、整机能耗:0.5KW5、安全措施:具有接地保护、漏电保护、短路保护、试验装置采用安全型插座、试验导线采用高强度安全型试验导线。
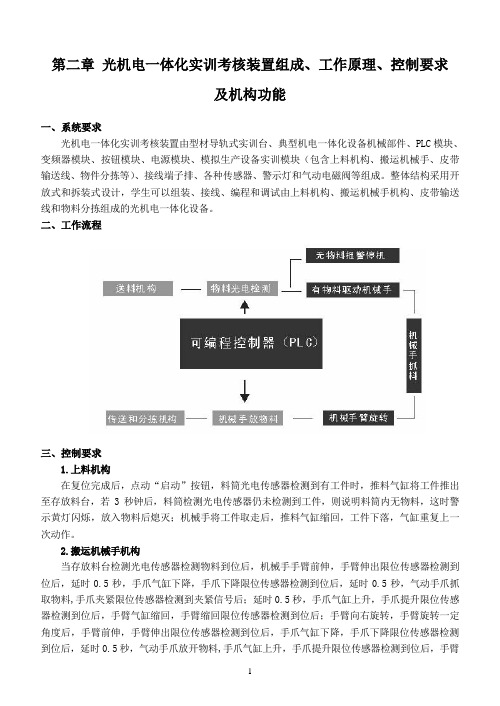
六、整机工作流程:(见附图五、图六、图七)七、工作原理在触摸屏上按启动按钮后,装置进行复位,当装置复位到位后,由PLC启动送料电机驱动放料盘旋转,物料由送料盘滑到物料检测位置,物料检测光电传感器检测:如果送料电机运行一分钟后,物料检测光电传感器仍未检测到物料,则说明送料机构已经无料或故障,这时要报警:当物料检测光电传感器检测到有物料,将给PLC发出信号,由PLC驱动机械手臂伸出手爪下降抓物,然后手爪提升臂缩回,手臂向右旋转到右限位,气爪松开,将物料放到传送带上,落料口的物料检测传感器检测到物料后启动传送带输送物料,同时机械手按原来位置返回,进行下一个流程:传感器则根据物料的材料特性、颜色等特征进行辨别,分别由PLC 控制相应电磁阀使气缸动作,对物料进行分拣。


光机电一体化实训考核装置组成工作原理1.光源:光源是产生光信号的元件,可以是激光器、波长可调的光源等。
光信号的波长和强度可以通过光源的控制系统进行调节。
2.机械平台:机械平台是支持和驱动各种光学器件和机械臂的基础设施,可以通过电机、步进电机等驱动器件对平台进行控制,实现运动和定位。
3.光学器件:光学器件主要包括镜片、透镜、光栅、偏振片等,用于对光信号进行调制、聚焦、分光、偏振等处理。
通过调整光学器件的位置和参数,可以改变光信号的特性。
4.电子控制系统:电子控制系统包括各种传感器、调节器、控制器等,用于监测和控制光学器件和机械平台的状态和动作。
通过电子控制系统,可以实现对光信号的精确控制和调节。
1.准备工作:首先需要对光机电一体化实训考核装置进行配置和调试。
包括选择合适的光源、机械平台和光学器件,以及编写相应的控制程序和算法。
2.组装调试:将光学器件和机械平台按照设计要求进行组装,并与电子控制系统进行连接。
通过调试和测试,确保各个元件安装正确,系统的电路连接正常,以及机械平台的运动和定位准确。
3.操作设置:设定实训考核的任务和要求。
通过电子控制系统,可以设定光源的波长和强度,调整光学器件的位置和参数,以及控制机械平台的运动和定位。
4.考核操作:学生根据设定的任务和要求进行操作。
操作对象可以是光学器件的调整和定位,光信号的调节和分光,光学系统的组装和调试等。
学生需要根据任务和要求,通过调控各个元件和系统,实现期望的操作效果。
5.数据采集和评估:电子控制系统可以实时采集和记录学生的操作数据,包括光源的波长和强度、光学器件的位置和参数,以及机械平台的运动和定位等。
根据这些数据,可以对学生的操作技能进行评估和分析。
通过光机电一体化实训考核装置,学生可以在实际操作中熟悉和掌握光机电一体化的基本原理和技术,提高操作技能和处理问题的能力。
同时,电子控制系统的数据采集和评估功能,也为教师提供了科学的考核和评估手段。

机电一体化系统综合实训心得体会机电一体化系统综合实训心得体会机电一体化系统综合实训心得体会 16-03- 机电一体化系统综合实训心得体会机电一体化系统综合实训心得体会(一)我在XXX年X月参加XX公司主办的全国机电一体化师资培训班,在培训期间,就机电一体化专业的发展和方机电一体化系统综合实训心得体会 16-03- 机电一体化系统综合实训心得体会机电一体化系统综合实训心得体会(一)我在XXX年X月参加XX公司主办的全国机电一体化师资培训班,在培训期间,就机电一体化专业的发展和方向做了介绍,参观了XX技师学校的实训基地,其中包括柔性系统,触摸屏在行走机械手中的应用,PL在行走机械手中的应用,变频器调速的应用。
其中,TVT-ETSA自动生产线拆装与调试实训装置包括以下内容:气动技术、传感器检测技术、直流电机驱动技术、步进电机驱动技术、伺服电机驱动技术、触摸屏应用技术、上位机监控技术、PL工业络技术、变频调速技术、PL技术、故障检测技术、机械结构与系统安装调试技术、人机接口技术、运动控制技术等,是一款设计优秀的学生试验实训平台。
学习的模块包括有:电源模块、4变频器与交流三相同步电机模块、TP177B触摸屏的使用,井式供料单元、皮带传送与检测单元、电感传感器、电容传感器调整方法、到位传感器X4调整方法、行走机械手搬运与仓库单元、行走机械手搬运与仓库单元、旋转编码器、切削加工单元、多工位装配单元。
接下来的学习内容是:触摸屏在行走机械手中的应用,其中包括:在触摸屏上制作两个按钮,一个按钮摁下后,行走机械手前移动,一个按钮摁下后,行走机械手后移动。
触摸屏通过通信电缆与S7-0的通信口(PRT0)连接的,以PPI或PI通信方式与PL进行数据交换。
触摸屏直接对PL输出进行写入操作,使Q0.4与Q0.5导通或关断,来控制直流电机的正转与反转。
从而控制行走机械手的左移动与右移动。
PL的I/分配、编写触摸屏程序、通信参数设置、变量的连接、触摸屏按钮的制作、为按钮设置变量函数、触摸屏程序的下载、络线连接的计算机IP设置、SIATI IN FLEXIBLE XX通信设置、PL程序编写、调试。

光机电一体化实训装置操作流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!光机电一体化实训装置是光机电领域教学与科研的重要工具,它融合了光学、机械、电子、控制等多学科技术。


光机电一体化实训装置在机电类课程教学中的应用作者:方贵盛孙平来源:《电脑知识与技术》2010年第01期摘要:传统的教学仪器设备主要为了满足某门课程验证性实验的需要,缺乏对学生实践动手能力和创新能力的培养。
光机电一体化实训装置融合了机械、电气、PLC、气动、传感等多种技术,采用了开放式和模块式结构,方便对学生进行综合技能的培养。
本文主要针对光机电一体化实训装置的基本构成、主要功能进行了阐述,并基于此装置进行机电类课程模块设计与项目设计。
在此基础上,以《电气控制与PLC》课程为例,探索理实一体化教学模式。
关键词:光机电一体化;实训装置;理实一体化教学;项目化教学;模块化教学中图法分类号:TP3 文献标识码:A 文章编号:1009-3044(2010)01-254-03Application of the Opto-Mechatronics Practice Training Equipment in Course Teaching of Mechanical SpecialtyFANG Gui-sheng, SUN Ping(Zhejiang Water Conservancy and Hydropower College, Hangzhou 310018, China)Abstract: The traditional teaching equipment is mainly used to verification experimental teaching. It is deficient to foster students practical ability and creativity. The opto-mechatronics practice training equipment which adopts open architecture and modular structure, applies various technologies, such as mechanical technology, electrical control technology, PLC technology, pneumatic technology, sensing technology to train students comprehensive ability. In this paper basic structure and main functions of the opto-mechatronics practice training equipment are introduced. Some course modules and course projects of mechanical specialty are designed based on the equipment. Finally, by making an example in the electrical control and PLC course teaching, the teaching method combining theory with practice is described.Key words: opto-mechatronics; practice training equipment; teaching combining theory with practice; project teaching; modular teaching1 概述职业教育的核心是提高学生的实践动手能力和分析解决实际问题的能力。

SX-815Q机电一体化综合实训考核系统介绍SX-815Q Mechatronics Training & Testing Composite System广东三向教学仪器制造有限公司Guangdong Sanxiang Teaching Apparatus Co. ; LTD一、 系统概述System Summarize机电一体化Mechatronics 技术是将机械技术、电工电子技术、微电子技术、信息机电一体化技术、传感器技术、接口技术、信号变换技术等多种技术进行有机地结合;并综合应用到实际中去的综合技术..伴随经济全球化;我国制造业成为国民经济的核心;而机电一体化成为制造业发展的“发动机”;机电一体化技术人才的需求量也因此大幅度提高;相关院校培养机电一体化类专业的毕业生就业范围很广;主要从事设备的安装、调试、维修、销售及管理;是社会需要的复合型高新技术人才..该套系统是基于国家中长期人才发展规划纲要2010-2020年对经济社会发展重点领域急需紧缺专门人才及创新型科技人才的培养要求;依据国家相关职业工种培养及鉴定标准;结合中国当前制造业的岗位需求;接轨世界技能竞赛World skills 相关标准及规程开发设计而成..该套系统由“工作站”Working Station 形式综合体现;“工作站”包含机电一体化“工作岛”Working Islands;电气装配台;机械装配台;工具、资料柜及其他附属工作设施;不但让操作者在工作中实习训练了机电专业技能;同时也体验到职业素养中的社会能力与方法能力..“工作站”的核心是“工作岛”;由MPS 模块化生产线设备组成;共分为液体混合灌装、组装加工、检测判别、机器人和智能仓储五个工作岛设备组成;工作岛由PLC 、变频器、伺服驱动、步进驱动、气动元件、触摸屏等工业控制器件构成;操作者需要具备机械装调、电气管路连接、程序设计、机器人操作、传感器装调、检修排故、触摸屏组态等现代制造业岗位必要的技能;设备技术涵盖面广;定位具有前瞻性;是机电一体化专业教学实习、技能鉴定和技能竞赛的绝佳载体..工作室Working Studio工作站Working Station工作站Working Station工作岛Working Island工作岛 Working Island工作岛Working Island工作岛 Working Island………二、系统参数 System Parameter◆电源要求:三相五线 380V◆设备尺寸:360cm×150cm×160cm长×宽×高◆设备重量:230kg◆额定电压:AC380V ±5%◆额定功率:2.2KW◆环境湿度:≤90%◆工作站占地空间:560cm×520cm长×宽◆安全保护功能:急停按钮;漏电保护;过压过流保护;过热保护;接地保护..三、系统功能 System Function“液体混合灌装工作岛”设备功能:能对液体进行混合搅拌;可实现液位的动态平衡及稳定;使被灌装液体均匀无沉淀;并能对空瓶进行高精度的注液灌装..“组装加工工作岛”设备功能:完成配件上料;并对瓶子或其他物品进行自动装配.. “检测判别工作岛”设备功能:可检测物品的材料、颜色属性及前工序配件装配情况.. “机器人工作岛”设备功能:通过利用工业机器人;对目标物品自动进行搬运、分类、装配或其他复杂工序;实现最终成品的完成..“智能仓储工作岛”设备功能:通过双轴高精度运行装置;准确地将最终的成品按要求放入仓储货架中;或将物品从仓储货架中取出..整体功能:能实现液体灌装自动化生产线的混合、灌装、装配、检测、搬运、分类及仓储的过程;全过程可通过运动机构及程序自动完成;操作者可以对系统整体或部分“工作岛”进行控制设计、电气安装、机械装调、程序编制、线路连接、参数调试、系统优化和故障排除等操作..组合式功能:可根据其他控制要求;将“工作岛”设备或其包含的部件;进行顺序、位置的调换;达到不同的控制功能..同时工作岛的PLC采用通用接口标准;可以兼容任何一个品牌的PLC..四、系统特点 System Specialty一个结合:◆国家职业标准与世界技能竞赛标准的有机结合两个突破:◆突破传统单套实训鉴定设备形式;推出复合型“技能工作站”;◆突破以往单一专业能力培养模式;加入综合职业能力体验手段..四个首创:◆国内首创将运动控制与过程控制有机结合;◆国内首创灵活度高的组合应用手段;◆国内首创引入工业机器人技术;◆国内首创增加能耗测量及分析系统..八个应用:◆多品牌PLC兼容应用◆计算机技术结合应用◆传感器技术分类应用◆机器人技术真实应用◆网络通信技术灵活应用◆机械装调技术规范应用◆多种驱动技术组合应用◆系统检修技术实战应用注解:Ps:机电一体化是世界技能竞赛中技术含量较高的竞赛项目;在国际上采用企业制的规范标准;如“Agreement on Professional Practice专业实习协议”;而在我国机电一体化专业遵循“维修电工”与“装配钳工”职业标准;两者既有联系又有区别;因此在本系统的设计标准参照了世界技能竞赛worldskills的相关标准;并且结合了我国目前对机电一体化技能人才的培养标准;从而形成即符合我国国内培训与鉴定的需求;同时还与世界技能竞赛相关要求与标准接轨的综合实训系统..五、可进行的实习课题 Tasks Could be Carry out国家职业培训及鉴定类:PLC部分1. PLC基本指令的应用2. PLC功能指令的应用3. PLC步进指令的应用4. 利用编程软件对PLC编程5. PLC对变频器PID的控制6. PLC控制环形传输带7. PLC检测多种物料属性8. PLC检测物料放置方向9. PLC对传输带运行的绝对定位控制10. PLC对传输带的脉冲定位控制11. PLC对传输带的混合定位控制12. PLC对双轴机器人的基本动作控制13. 利用脉冲指令对步进电机控制14. PLC对多轴工业机器人自动控制15. PLC对装配件旋转控制16. PLC对控制装配单元17. PLC对堆垛机单轴与双轴控制18. PLC对仓库出库入库自动控制19. PLC对仓库间仓位调配的控制PLC扩展实训1.对温度数值的读取与处理2.对液体压力的读取与处理3.对流量的读取与处理4.对液体液位数值读取与处理人机界面系统实训1. 窗口切换2. 界面制作3. 数据输入4. PLC寄存器连接5. 流动文字6. 触摸屏监控环形传输带实训7. 触摸屏监控各工作岛设备8. 触摸屏监控双向双面仓储系统实训9. 触摸屏对整体实训流程监控与管理10. 通过触摸屏对整套系统参数设置11. 触摸屏对系统报警代码查询与处理12. 触摸屏多级权限设置实训13. 触摸屏实现故障设置于诊断排除变频器系统实训1. 变频器基本接线操作2. 开环系统实训3. PU操作及外部操作4. 速度定位系统实训5. 并用操作运转实训6. 通讯操作运转实训7. 多段速度运转实训8. 变频器无极调速实训9. 瞬时停电起动实训10. PID控制系统11. 面板参数复制实训12. 多位置定位参数调节机器人系统实训1. 步进系统接线操作2. 单轴步进系统控制3. 双轴及多轴步进系统控制4. 多速度段运行控制5. 启动与制动变速实训6. 多点定位控制7. 机器人原点与复位8. 机器人单步与连续控制9. 多细分度与脉冲实训10. 网络IO监控机器人工作状态交流伺服系统实训1. 交流伺服系统基本接线操作2. 放大器参数设置3. 反馈与脉冲数观察4. 脉冲输入控制正反转5. 带速度反馈的脉冲控制正反转6. 相对位置控制7. 凸轮控制增量方式8. 故障代码的熟悉与排除9. 双轴仓库控制管理传感器部分实训1. 金属传感器的应用实训2. 颜色传感器对单一颜色分拣实训3. 颜色传感器对其他颜色分拣实训4. 位置传感器实训5. 霍尔传感器实训6. 磁性开关实训7. 编码器的应用8. 编码器绝对控制与增量控制9. 温度传感器的应用10. 对射型与反射型传感器的应用网络部分实训1. RS485网络实训2. FX2N-32CCl的应用3. 触摸屏通过PU控制变频器实训4. PLC通过RS指令控制变频器实训5. PLC、触摸屏与变频器通讯控制6. N:N网络搭建与调整实训7. 现场总线网络操作与设置8. 现场总线网络搭建入门机械部分1.结构部件的组装2.气动元件的组装3.机械零件的部件组装4.机械系统的装调故障诊断与排除部分实训1. 电气元件线路故障诊断与排除2. 传感器线路故障诊断与排除3. 控制元件的线路故障诊断与排除4. 电源线路的故障诊断与排除5. 软件故障的诊断与排除世界技能竞赛类:1.电气线路的连接2.电气元件的布局与组装3.系统或小系统的设计4.通过手持测试器对各连线的测试5.通过PLC编程对各控制单元的操作6.根据“专业实习协议”的操作与调试7.电气类部件及组件的安装8.气动类元件的安装9.机械零件的组装10.用气量统计与分析11.用电量的统计与分析12.系统或小系统故障分析与处理13.系统及小系统优化与提效创新项目类:1.视觉传感器的静态应用2.视觉传感器的动态应用3.机器人与视觉传感器的组合应用4.罐体及盒体混合组装5.不合格物料二次加工处理6.小系统的逆向运行7.智能仓库的出料运行六、与世界技能竞赛的接轨 About Worldskills Needs领域fields 世界技能竞赛要求WS.NeedsSX-815Q情况SX-815Q Achievement备注Remark涉及能力Capability PLC编程能力电气安装调试能力系统设计规划能力工艺与规范能力检修与排故能力电气部件安装能力PLC编程能力电气安装及连接线的制作系统设计规划能力工艺与规范能力元件、线路及程序故障的检修低压电气及气动元件安装能力完全接轨机械部件安装能力系统能耗及效率优化机械零件安装能力用气量及用电量测量与分析体现形式Form 模块化设计组合式应用量化各操作点竞赛任务循序渐进分离式安装与操作灵活的工作岛模块设计;技能组合又能分散;并且根据不同的要求可以组合不同的运行功能;工作岛上器件标准化设计;可进行互换安装;不但工作岛之间顺序可调换;工作岛上执行模块的顺序也可调换;为竞赛出题提供多种选择途径..完全接轨内容要求Content 通过模拟盒的电气运行通过PLC的电气运行工艺与规范要求工作效率要求拆装方便设备配备手持测试器;在脱离PLC使用的情况下可以测试线路连接的情况;工作站配备企业管理流程及制度;要求操作者在工作的同时遵循必要的规范及流程;在实习专业技能的同时提高职业素养及综合职业能力;工作岛还配备用气量及用电量检测仪;通过专业的软件能智能分析系统的能耗及工作效率..完全接轨方法手段Method 过程考核结果考核记录考核设备配套有过程评价表格及过程情况记录表;方便操作者和评价者对设备进行针对性的记录、统计、分析和汇总..完全接轨七、系统相关图片 System Picture1、工作室中的SX-815Q机电一体化综合实训考核系统工作站The WorkingStation of SX-815Q Mechatronics Training & Testing Composite System in Working Studio.2、带六轴机器人的SX-815Q机电一体化综合实训考核系统工作岛合并The WorkingIslands with 6arms Robot of SX-815Q Mechatronics Training & Testing Composite System3、带两轴机器人的SX-815Q机电一体化综合实训考核系统工作岛合并The WorkingIslands with 2arms Robot of SX-815Q Mechatronics Training & Testing Composite System4、带视觉传感器的SX-815Q机电一体化综合实训考核系统工作岛合并The WorkingIslands with Vision Sensor of SX-815Q Mechatronics Training & Testing Composite System5、液体混合灌装及组装加工工作岛The liquid mixture filling WorkingIsland and The Assembly WorkingIsland6、检测判别及智能仓储工作岛The Detect discrimination WorkingIsland and The Smart storage WorkingIsland7、2轴机器人和6轴机器人工作岛The 2 arms Robot WorkingIsland and The 6 rms Robot WorkingIsland8、其他工作站配件The Other workstation accessories人与人之间的距离虽然摸不着;看不见;但的的确确是一杆实实在在的秤..真与假;善与恶;美与丑;尽在秤杆上可以看出;人心的大小;胸怀的宽窄;拨一拨秤砣全然知晓..人与人之间的距离;不可太近..与人太近了;常常看人不清..一个人既有优点;也有缺点;所谓人无完人;金无赤足是也..初识时;走得太近就会模糊了不足;宠之;时间久了;原本的美丽之处也成了瑕疵;嫌之..与人太近了;便随手可得;有时得物;据为己有;太过贪财;有时得人;为己所用;也许贪色..贪财也好;贪色亦罢;都是一种贪心..与人太近了;最可悲的就是会把自己丢在别人身上;找不到自己的影子;忘了回家的路..这世上;根本没有零距离的人际关系;因为人总是有一份自私的;人与人之间太近的距离;易滋生事端;恩怨相随..所以;人与人相处的太近了;便渐渐相远..人与人之间的距离也不可太远..太远了;就像放飞的风筝;过高断线..太远了;就像南徙的大雁;失群哀鸣..太远了;就像失联的旅人;形单影只..人与人之间的距离;有时;先远后近;有时;先近后远..这每次的变化之中;总是有一个难以忘记的故事或者一段难以割舍的情..有时候;人与人之间的距离;忽然间近了;其实还是远;忽然间远了;肯定是伤了谁..人与人之间的距离;如果是一份信笺;那是思念;如果是一个微笑;那是宽容;如果是一句问候;那是友谊;如果是一次付出;那是责任..这样的距离;即便是远;但也很近..最怕的;人与人之间的距离就是一句失真的谗言;一个不屑的眼神;一叠诱人的纸币;或者是一条无法逾越的深谷..这样的距离;即便是近;但也很远..人与人之间最美的距离;就是不远不近;远中有近;近中有远;远而不离开;近而不相丢..太远的距离;只需要一份宽容;就不会走得太远而行同陌人;太近的距离;只需要一份自尊;就不会走得太近而丢了自己..不远不近的距离;多像一朵艳丽的花;一首悦耳的歌;一首优美的诗..人生路上;每个人的相遇、相识;都是一份缘;我们都是相互之间不可或缺的伴..人与人之间的距离虽然摸不着;看不见;但的的确确是一杆实实在在的秤..真与假;善与恶;美与丑;尽在秤杆上可以看出;人心的大小;胸怀的宽窄;拨一拨秤砣全然知晓..人与人之间的距离;不可太近..与人太近了;常常看人不清..一个人既有优点;也有缺点;所谓人无完人;金无赤足是也..初识时;走得太近就会模糊了不足;宠之;时间久了;原本的美丽之处也成了瑕疵;嫌之..与人太近了;便随手可得;有时得物;据为己有;太过贪财;有时得人;为己所用;也许贪色..贪财也好;贪色亦罢;都是一种贪心..与人太近了;最可悲的就是会把自己丢在别人身上;找不到自己的影子;忘了回家的路..这世上;根本没有零距离的人际关系;因为人总是有一份自私的;人与人之间太近的距离;易滋生事端;恩怨相随..所以;人与人相处的太近了;便渐渐相远..人与人之间的距离也不可太远..太远了;就像放飞的风筝;过高断线..太远了;就像南徙的大雁;失群哀鸣..太远了;就像失联的旅人;形单影只..人与人之间的距离;有时;先远后近;有时;先近后远..这每次的变化之中;总是有一个难以忘记的故事或者一段难以割舍的情..有时候;人与人之间的距离;忽然间近了;其实还是远;忽然间远了;肯定是伤了谁..人与人之间的距离;如果是一份信笺;那是思念;如果是一个微笑;那是宽容;如果是一句问候;那是友谊;如果是一次付出;那是责任..这样的距离;即便是远;但也很近..最怕的;人与人之间的距离就是一句失真的谗言;一个不屑的眼神;一叠诱人的纸币;或者是一条无法逾越的深谷..这样的距离;即便是近;但也很远..人与人之间最美的距离;就是不远不近;远中有近;近中有远;远而不离开;近而不相丢..太远的距离;只需要一份宽容;就不会走得太远而行同陌人;太近的距离;只需要一份自尊;就不会走得太近而丢了自己..不远不近的距离;多像一朵艳丽的花;一首悦耳的歌;一首优美的诗.. 人生路上;每个人的相遇、相识;都是一份缘;我们都是相互之间不可或缺的伴..。
一、课程性质、目的和任务“机电一体化系统综合实训”是中央广播电视大学数控技术专业(机电方向)的必修实践课之一。
本实训环节是在课程试验的基础上,以机电一体化系统的硬件连接、控制原理、控制软件编制、安装调试与操作的综合实训。
通过本环节的实训,能够使学生对机电一体化系统的基本组成,控制方式、控制对象的基本特征及工作机理,有更进一步机电一体化系统综合实训全面地了解,并能够综合运用所学的基本知识与技能,完成对典型机电一体化系统的组装、连接、调试,实现其基本控制功能。
从而培养学生独立分析问题和解决问题的能力及工程实践的能力。
二、课程教学总时数和学分本课程4学分,课内学时为72,开设一学期。
根据该实训环节的特点,建议采取集中方式进行,各办学点根据自己的生源情况和设备情况,总实训周数为4周。
三、课程的教学基本要求通过本课程的教学,要达到以下基本要求。
1、了解控制对象的基本工作原理,及运动与动作特征;2、能够根据控制要求,正确地选择控制系统,并掌握其主要技术性能指标;3、掌握系统的硬件连接、安装、调试的基本方法,并能进行正确的操作与维护;4、掌握典型控制程序的编制方法,实现基本控制功能。
四、与相关课程的衔接、配合、分工“机电一体化系统综合实训”是机电专业的一门综合实践课,以《机械设计基础》、《电工电子技术》、《数控机床电器控制》等课程为理论基础。
以《可编程控制器应用》、《单片机技术》、《传感器技术》、《液压与气动技术》和《机电一体化系统》等课程及相应的实践环节为专业基础;并为《综合实训(机电)》的先行综合实践环节。
五、课程教学要求的层次通过本实训环节的教学要达到3个层次的基本要求。
理解:对与本教学环节相关的基本概念、基本方法达到理解程度。
运用:对本实训环节所涉及的相关基础知识、基本理论要能够运用,理论联系实际。
提高分析问题和解决问题的能力。
掌握:对教学内容涉及到的基本方法和操作技能达到掌握程度。
六、实训条件1、实训场地各办学点结合自己的实际情况,必须按照本实训的教学要求,合理选择校内或校外实训场地。
STAR MPS光机电一体化自动装配实训系统(STAR OME-AA)
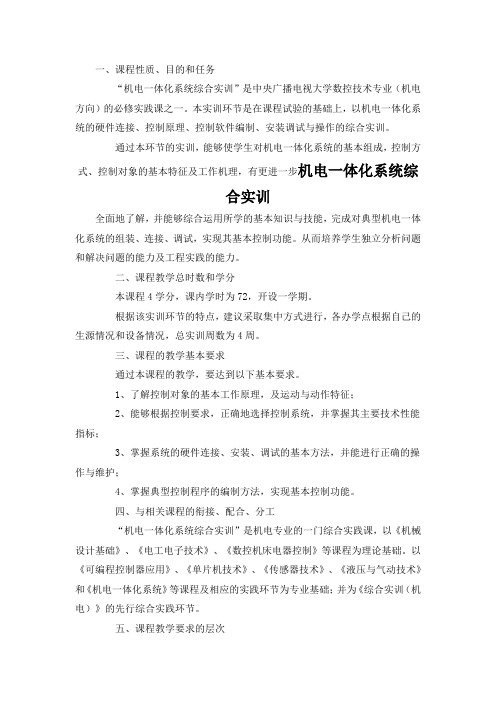
本套系统由5个单元组成,它们是供料单元、加工单元、装配单元、分拣单元以及将他们联系在一起的配送单元。
每个单元有各自独立的控制系统以及向互独立的气压装置,并有各自的动作特点和要求。
机动灵活,可以独立完成特定试验,也可以任意组合来完成特定的功能。
本系统在如上图式的排列方式下所能完成的任务是将φ30×50
的工件由原料仓库取出,对其进行简单的冲压加工,然后把加工好的零件与另一个φ20×40零件进行装配,最后把装配好的零件进行材质检测并对其进行分拣。
工件在各功能单元之间的传递由配送单元完成。
单元介绍
供料单元
供料单元(图)
这部分主要实现的功能是供料,原料储存于管状料仓中,经由此单元被定时定量的输送到系统中去,单元效果如上图。
加工单元
加工单元(图)
本单元要实现的功能是把送入的工件进行简单的加工。
本单元的基本动作流程是接受工件、工件到位后工作台移动、移动到位后加紧工件、然后对工件进行冲压加工、加工完成后松开工件、最后把工件送还。
结构效果图如上图示。
装配单元
装配单元(图)
此单元的功能是把不同的工件进行装配。
具体就是把一个从料仓中取出的细轴状零件装入被送过来的杯状工件中。
具体动作流程是:接受外来零件(杯状)、从料仓中取出细轴类零件、把细轴类零件装入杯状零件中、最后把装配好的零件送还。
结构效果图如上图示。
分拣单元
分拣单元(图)
此单元实现工件的分拣功能。
装配好的零件进入此单元后,对工件进行检测并对其进行分拣。
分拣的物体根据检测传感器的不同可以根据颜色、材质等特性进行分拣。
结构效果图如上图示。
配送单元
配送单元(图)
此单元的功能是实现工件在各个单元之间的传递。
此单元非常灵活,可以实现水平左右长距离移动、上下升降、0~180度转动、手臂的伸缩以及工件的加紧等功能。
配以行程可调节气缸以
及位置传感器,手指部分可以到达规定三维空间里的任何位置。
在整个系统中,把工件从送料单元中取出工件,把工件送入加工单元以及把加工好的工件收回,把杯状工件送入装配单元再把装配好的工件取出,把装配好的工件送入分拣单元进行分拣都是由他完成的。
其结构效果图如上图示。