M170E5-L05 approval spec ver 2.0
- 格式:pdf
- 大小:1.07 MB
- 文档页数:28
Dashboard/…/motorBench 2.25 ReleasemotorBench 2.25.0 Release NotesCreated by Fernando Garibaldi, last modified by Jason Sachs 2 minutes agoOverview of motorBench® Development SuiteWhat’s NewSystem RequirementsSupported HardwareHigh-voltage hardwareOther hardware required with both low-voltage and high-voltage setupsInstalling motorBench® Development Suite 2.25.0RepairsMotor Control Fixed IssuesChanges since revision 2.15Known IssuesMotor Control IssuesLimitationsSupported DevicesSoftware LimitationsMotor Control LimitationsSupported Motor ParametersCustomer SupportThe Microchip Web SiteAdditional SupportOverview of motorBench® Development SuiteMicrochip motorBench Development Suite is a graphical, interactive development environment designed to help motor control engineers to design and implement motor control systems, from very basic to very sophisticated ones.motorBench® Development Suite allows the user to:configure a motor systemmeasure motor parameterstune the controller gainsgenerate code to spin the motorWhat’s New1. Motor Control Application Framework (MCAF) R5 – see MCAF User's Guide for more information.a. Added support for dsPIC33CK256MP508b. Added Angle-tracking PLL (ATPLL) supportc. Improved Customize page support in motorBench2. Customizea. Allow advanced customization of MCAF code generation3. Measurea. Updated fault handing logic to detect if an invalid load is connected to the inverter before starting motor parameter measurement or Board calibrationb. Improvements to support motors with large values of stator inductancec. Improvements to support motors with large inertia and high cogging torque4. MCC Integrationa. Improved support for MCC-generated peripheral and system initialization code5. Device Supporta. Added support for dsPIC33CK256MP508i. This device is not yet supported by the motor parameter measurement featureSystem RequirementsMPLAB X 5.30 or later.XC16 compiler version:Firmware generated by motorBench® Development Suite has been tested with XC16 1.41.33EP devices: XC16 1.36 or later are expected to work with motorBench®Development Suite but have not been extensively tested.33CK devices: Either of the following is required:XC16 1.50 or laterXC16 1.41 with DFP 1.2.66 or laterMPLAB Code Configurator®(MCC) Plugin Version 3.95.0 or laterPIC24/dsPIC33/PIC32MM library 1.166.0 or laterSupported HardwareThis release of motorBench®Development Suite supports both low-voltage and high-voltage setups.Low-voltage hardware1. dsPICDEM MCLV-2 Development Board [Part Number: DM330021-2]2. dsPIC33EP256MC506 External Op Amp Motor Control PIM [Part Number: MA330031-2] with silicon revision A8 or dsPIC33CK256MP508 External Op Amp Motor Control Pim[Part Number: MA330041-1].3. A three phase PMSM or BLDC motor that is compatible with 24V, such as the Hurst 24V BLDC motor DMA0204024B101 [Part Number: AC300022].4. 24V power supply [Part Number: AC002013] - ensure this connects to AC mains using a 2-prong cable. If you have an AC002013 with a 3-prong cable, please contact Microchip.High-voltage hardware1. dsPICDEM MCHV-2 Development Board [Part Number: DM330023-2] or dsPICDEM MCHV-3 Development Board [Part Number: DM330023-3]AC mains voltages 120VAC 60Hz and 220VAC 50Hz have been tested.2. dsPIC33EP256MC506 External Op Amp Motor Control PIM [Part Number: MA330031-2] with silicon revision A8 or dsPIC33CK256MP508 External Op Amp Motor Control Pim[Part Number: MA330041-1].3. A three phase PMSM or BLDC motor that is compatible with rectified AC mains voltage, such as the Leadshine 400W BLDC motor EL5-M0400-1-24 [Part Number: AC300025].Other hardware required with both low-voltage and high-voltage setups1. A USB-to-logic-level-UART converter from the following list:a. Saelig USB-COM-U or USB-COM-U13b. TRENDnet TU-S9 v2.02. Programming tool - one of the following tools: Real ICE, ICD33. Board calibration load resistors - this is optional, please see motorBench® Development Suite User's Guide document for more detailsInstalling motorBench ® Development Suite 2.25.0To install the MPLAB ® Code Configurator v3.95 Plugin1. In the MPLAB® X IDE, select Plugins from the Tools menu2. Select the Available Plugins tab3. Check the box for the MPLAB® Code Configurator v3, and click on InstallTo install different peripheral library version or motorBench ® Development Suite version when connected to internet1. Create a project with dsPIC33EP256MC506 or dsPIC33CK256MP508, or use the sample project.2. Open MPLAB® Code Configurator3. In the Versions tab under PIC24/dsPIC33/PIC32MM MCUs, find the multiple library versions (loaded version is indicated by the green check mark)4. Right-click on the required version of the library and select Mark for Load5. In the Versions tab under motorBench ® Development Suite find the multiple library versions (loaded version is indicated by the green check mark)6. Right-click on the 2.25.0 version of the library and select Mark for Load7. Click on Load Selected Libraries button to load the marked libraries.To install different peripheral library version or motorBench® Development Suite version when not connected to internet1. In the MPLAB® X IDE, select Options from the Tools menu2. Select Plugins tab3. Click on Install Library4. Add pic24-dspic33-pic32mm_v1.166.mc3lib5. Add motorBench_2.25.0.mc3lib6. Restart MPLAB® X IDERepairsMotor Control Fixed IssuesChanges since revision 2.15The following aspects of motorBench® Development Suite and the Motor Control Application Framework (MCAF) have been updated:MCAF has been updated to R5, includingChanges in R2:Support for DC link compensationSupport for overmodulationSupport for wider range of low-voltage motorsUpdated HAL for future MCHV2 supportUpdated Motor Control LibraryNumerous minor fixesChanges in R3:MCC system module compatibilityMCHV-2 and MCHV-3 supportInverter maximum current now has a 1:1 ratio with the maximum commanded dq-frame current of the drive, operating in FOC (in R2 this incorporated a deratingfactor)Other minor fixesChanges in R4:MCC peripheral supportParameter customizationQuadrature encoder supportAdded new startup method (Weathervane startup)Other minor fixesChanges in R5:Added device support for dsPIC33CK256MP508Added Angle-tracking PLL (ATPLL) sensorless estimatorImproved motorBench Customize page supportOther minor fixesSections in this release notes affected:Other RequirementsLimitationsSupported Motor ParametersKnown IssuesPlease note:We do not recommend using the MCP2200 USB to RS232 Demo Board [Part number: MCP2200EV-VCP ] with this release of motorBench® Development Suite.While testing, we have observed more frequent occurrence of a serial communication timeout issue while running motor parameter measurement using this cable.See Known Issues section of this document for more information (MCGUI-1141)Motor parameter measurement is only supported on dsPIC33EP256MC506 device.Issue Key Summary WorkaroundMBPLAN-673Serial port does not get closed programmatically when MCC exits during motor parametermeasurementIf you exit SC during execution, restart MPLAB X.MBPLAN-932Exception during attempted creation of a runtime properties class No workaround needed, this issue doesn't have an impact on thefunctionality.MBPLAN-984Improve error reporting for SC build errors in the event of a code generation failureMBPLAN-1095Switching projects after loading motorBench erroneously allows motorBench code to generate for new projectMBPLAN-1160"Import Motor" and "Export Motor" buttons can be clicked multiple times, opening multiple dialog boxesMotor Control IssuesIssue Key SummaryDB_MC-411Current calibration happens only once (at part reset) rather than upon entry to MCSM_RESET stateDB_MC-560Speed controller exhibits chattering behavior at voltage saturation hysteresis boundary (MCAF)DB_MC-978"Soft start" gate drive in board_service.c has duty cycle that is too smallDB_MC-1092PLL estimator may not converge into rotor reference frame while using the Classic startup method in MCAFDB_MC-1396PLL calculations in code generation do not allow motor.velocity.nominal to be more than 1250Hz electrical (=20kHz/8/2)DB_MC-1415With some motors and 12V operation, increased velocity margin improves startup but creates unstable estimatorDB_MC-1430Quanum MT4012 unstable in closed-loop operation at 4200 RPM speed and aboveDB_MC-1491With Quanum MT4012, MCAF may not detect stallDB_MC-1492Quanum MT4012 Stalls on pressing 'S3'(reverse) at low speeds and on changes to speed command potentiometerDB_MC-1495Anaheim BLY342D-24V-3000, BLY342D-48V-3200 motors creates hardware over-current during stall-detect testingDB_MC-1521Closed loop speed step response overshoot - MCHV2, Leadshine 400DB_MC-1892Some motors with extreme parameters may produce out-of-range error for stall_detect.group.timerCountsVarianceDetect (detected in Monte Carlo analysis)DB_MC-1920Board service isrCount-based timing is not guaranteedDB_MC-1922LED patterns not displayed when in the TEST_DISABLE or TEST_ENABLE statesDB_MC-2122BLWS232D motor startup in QEI mode causes a false detect for stall-detectionDB_MC-2213Deadtime needs to be changed in both MCC and motorBench to affect codeDB_MC-2275Large current rampup times may not start (STARTUP_TORQUE_RAMPUP_RATE = 0)DB_MC-2309QEI tracking loop Kp and Ki produce out-of-range errors for low-speed motorsDB_MC-2323Weathervane transition state should not have active damping enabledDB_MC-2387DC link voltage measurement may have too much phase delay for MCAF DC link compensation to work effectivelyDB_MC-2606MCC-generated code has incorrect IESO/FNOSC config bits for 33CKDB_MC-2671MCAF_CaptureTimestamp calls incorrect timer function for 33CK devicesDB_MC-2785Current sense signal integrity issue with 33CK during overmodulationLimitationsSupported DevicesmotorBench® Development Suite supports these devices:1. dsPIC33EP256MC5062. dsPIC33CK256MP508Software LimitationsmotorBench® Development Suite is tested for serial communication using Windows 7 and Windows 10 platforms. Other platforms may work with standard baud rates, but this operation has not yet been verified.Motor Control LimitationsFollowing are the known limitations for this release of motorBench® Development Suite:1. One mechanical load - constant load. This represents a mechanical load with constant inertia, viscous damping, and friction. The velocity control loop can generally rejectexternal disturbance torques, within the rated current of the motor and board, and within the bandwidth of the velocity control loop. Mechanical loads with time-varying or angle-varying inertia, viscous damping, and friction, such as a blower, compressor, or pump, are currently not supported.2. One motor type - PMSMMCLV-2:The reference motor is the Nidec Hurst motor DMA0204024B101 (MicrochipDirect part number AC300022). Microchip has also validated motorBench® DevelopmentSuite (including motor parameter measurement) with motors with parameters plotted below. Please also read the following section on Supported Motor Parameters. IfmotorBench® Development Suite is unable to spin a motor successfully, please contact Microchip staff for additional assistance.(Note: Mechanical time constant (2/3)×JR/Ke² represents the time constant of velocity acceleration under an open-loop synchronous-frame voltage step, neglecting the effects of inductance, with J, R, and Ke expressed in canonical metric units. R is expressed as line-neutral resistance = half of line-line resistance, and Ke is expressed as V/(rad/s) line-neutral zero-peak = Vrms/KRPM (line-line) × 0.007796968)MCHV-2/MCHV-3:The reference motor is the Leadshine 400W motor EL5-M0400-1-24 (MicrochipDirect part number: AC300025). Microchip has validated motorBench® DevelopmentSuite (including motor parameter measurement) with motors with parameters plotted below. Please also read the following section on Supported MotorParameters. If motorBench® Development Suite is unable to spin a motor successfully, please contact Microchip staff for additional assistance.3. Boarda. dsPICDEM™ MCLV-2 development board. This release of motorBench® Development Suite is compatible with modifications to the board to alter its rated current orvoltage. Contact your local Microchip office to obtain the document "Using MCLV-2 with motorBench® Development Suite to support alternative current and/or voltageratings", which provides guidance for such modifications. Other modifications may not be compatible.b. dsPICDEM™ MCHV-2 and MCHV-3 development boards. This release of motorBench® Development Suite is compatible with unmodified MCHV-2 and MCHV-3development boards.4. Motors should be well-matched to the board and operating voltage. The nominal DC link voltage of the MCLV-2 board is 24V. This voltage can be changed by cutting jumperJ6 and using an appropriate power supply connected to the appropriate terminals of J7. Use of a mismatched motor (for example, a 12V motor used with a 24V DC link voltage) may cause a hardware over-current fault; in this case motor parameter measurement may fail with the message "Fault Code #10: Undefined Fault". Retry with an appropriate DC link voltage.5. Two PIMs and Two devices - dsPIC33EP256MC506 External OpAmp PIM with silicon revision A8 or dsPIC33CK256MP508 External OpAmp PIM. (Please see the HardwareSetup section of the motorBench User's Guide for important modifications to dsPIC33EP256MC506 External OpAmp PIM for use in MCHV-2 and MCHV-3.)6. One algorithm - FOC7. Estimators - PLL, QEI, ATPLL8. Motor parameter measurement:a. Performance criteria adjustment is not presently supported. This includes adjustment of phase margin and PI phase lag at crossover in the current loop; Microchip hasnot completed validation and documentation of these adjustments.9. Autotuning:a. Performance criteria adjustment of the current loop is not presently supported. This includes adjustment of phase margin and PI phase lag at crossover; Microchiphas not completed validation and documentation of these adjustments.b. Use of performance criteria adjustment of the velocity loop is not fully documented or tested. We recommend not adjusting phase margin or PI phase lag unlessnecessary; cases where this is likely to occur are large inertias where αJ = JR/LK m2 > 10, for which an increase of phase margin is appropriate. Phase margin valuesbetween 70 and 85 degrees are recommended in this case, with larger values providing additional stability at the cost of lower velocity bandwidth.10. Axis management not currently implemented - supports only one axis.11. Code generation:a. PWM switching frequency is fixed at 20kHz and does not reflect the value entered under Board parametersb. Integration with external user-supplied code may involve substantial changes. Some guidelines for this are given in the documentation for the Motor ControlApplication Framework. While it is possible to integrate the code generated from motorBench® Development Suite with external code, it is the responsibility of the end user to validate this combination.12. Required compiler settings:a. Optimization-O1 or greater; -O0 and -Os will both compile without errors but do not execute fast enough to complete within the 50 microsecond ADC ISR. Note: at higheroptimization levels, in-circuit debugging using MPLAB X will behave unreliably with respect to breakpoints and single-stepping through C code.The "Omit frame pointer" and "Unroll loops" settings must be enabled.b. Memory model:Large data model (handles using pointers, not direct addressing, to allow for more than 8K of program variables)Small scalar modelc. Additional options:-Wno-volatile-register-var -finlined. Test harness: In order for the test harness to be enabled, the symbols MCAF_TEST_PROFILING and MCAF_TEST_HARNESS should be defined.13. Recommended compiler settings:a. Additional options:-WundefSupported Motor ParametersSince version 2.15, motorBench®Development Suite supports a wide range of motors, subject to the following notes:Ranges of motor parameters (including rated values and computed metrics) must be within the limits noted in either range-limits-mclv2.html or range-limits-mchv2.html.These ranges were tested to ensure that code generation produced firmware constants that were within bounds.Motor parameter measurement does not need to complete successfully but valid motor parameters are required. Some motors may have too low of an inductance or resistance, and may fail motor parameter measurement.Other particular issues that may cause incompatibility with motorBench®Development Suite includeLarge inertia values – in this case, increasing voltage loop phase margin may prevent stability problems. (See "Autotuning" in the Limitations section of this document.) Rotor magnetic saliency – if there are significant differences between Ld and Lq (>10% difference) then some of the MCAF algorithms may not work optimally. Highermismatch between Ld and Lq is typically found in interior-permanent magnet (IPM) motors, and is an intentional feature of the design. See the MCAF User's Guide for more information.Large back-EMF harmonics – a quasi-sinusoidal back-emf is assumedIssues involving individual motor control algorithms, such as PLL estimator, motor startup, or stall detectionHigh cogging torqueMismatch between motor and drive (namely using a motor with current and/or voltage requirements significantly different from that of the hardware) Microchip cannot guarantee that motorBench®Development Suite will work correctly with all motors. If a particular motor does not work properly, please contact the MCU16 Motor Control Team for further guidance.Customer SupportThe Microchip Web SiteMicrochip provides online support via our web site at . This web site is used as a means to make files and information easily available to customers. Accessible by using your favorite Internet browser, the web site contains the following information:Product Support – Data sheets and errata, application notes and sample programs, design resources, user’s guides and hardware support documents, latest software releases and archived softwareGeneral Technical Support – Frequently Asked Questions (FAQs), technical support requests, online discussion groups/forums (), Microchip consultant program member listingBusiness of Microchip – Product selector and ordering guides, latest Microchip press releases, listing of seminars and events, listings of Microchip sales offices, distributors and factory representativesAdditional SupportUsers of Microchip products can receive assistance through several channels:Distributor or RepresentativeLocal Sales OfficeField Application Engineering (FAE)Technical SupportCustomers should contact their distributor, representative or field application engineer (FAE) for support. Local sales offices are also available to help customers. A listing of sales offices and locations is available on our web site.Technical support is available through the web site at: 。


ITA-160/170 系列快速入门手册 1安装系统之前,用户需确认包装中含有本设备以及下面所列各项:• 1 x ITA-160/170 系列工业电脑• 1 x ITA-160/170 配件盒如果其中任何一项缺失或损坏,请立即与经销商或销售代表联系。
注:阅读PDF文件需要使用 Acrobat Reader。
用户可从以下路径下载 Acrobat Reader:/Products/acrobat/readstep2.html(Acrobat 为 Adobe 公司的商标)ITA-160/170 系列无风扇嵌入式紧凑型工业电脑,搭载瑞芯微 RK3399 处理器快速入门手册标准功能• 芯片和芯片组:瑞芯微 RK3399• 内存:板载 4GB DDR4 内存• 显示:ARM Mali-T864 GPU Support OpenGL ES3.2, Vul -kan 1.0, OpenCL 2.0• 双显模式:HDMI 输出分辨率可达 3840 x 2160@ 60Hz,VGA 输出分辨率可达 1920 x 1200@ 60Hz• 存储:板载 16G EMMC;支持 1 个 SATA 插槽,1 个 SD 槽位• 扩展槽:支持 1 个 Mini PCIe 插槽,2 个 M.2 插槽系统规格• 以太网:2 个 10/100/1000M 以太网 RJ45 接口• USB:2 个 USB3.0 接口+ 2 个 USB2.0 接口 (ITA-160); 2 个 USB3.0 接口 + 4 个 USB2.0 接口 (ITA-170)• 显示:1 个 HDMI(ITA-160) ;1 个 VGA 接口 + 1 个 LVDS 接口 (ITA-170)• 串口:1 个 COM 端口(ITA-160);6 个 COM 端口,其中 2 个支持 RS-232/422/485 切换,可另增扩 4COM(ITA-170)• 声音:1 个扬声器输出,1 个线路输入机箱与环境• 产品尺寸(W x H x D): ITA-160: 174×57×121 mm ITA-170: 198×80×121 mm • 电源输入:直流12V输入(ITA-160) 直流9-36V输入(ITA-170)• 工作温度:-25 ~ 60°C(ITA-160 搭配寒武纪 MLU220 加速卡时为 -25 ~ 50°C,带风流)• 重量:ITA-160: 1.08 kg ITA-170: 1.48 kg如需了解有关本产品及研华其它产品的详细信息,请访问我们的网站:如需技术服务与支持,请访问我们的技术支持网站: 本手册适用于 ITA-160/170 系列。

Ver 2.1目录Ver 2.0 (2)第1章仪器简介与开箱安装 (8)1.1仪器简介 (8)1.2开箱检查 (8)1.3电源连接 (8)1.4保险丝 (8)1.5环境 (8)1.6使用测试夹具 (9)1.7预热 (9)1.8仪器的其它特性 (9)第2章前面板说明及入门操作 (10)2.1前面板说明 (10)2.2后面板说明 (11)2.3显示区域的定义 (12)2.4按键及其相应的显示页面 (13)2.4.1测量主菜单按键【DISP】 (13)2.4.2系统设置主菜单按键【SETUP】 (13)2.5基本操作 (13)2.6开机 (14)第3章基本操作 (15)3.1<测量显示>页面 (15)3.1.1测试功能 (15)3.1.2测试量程 (16)3.1.3测试速度 (17)3.1.4文件管理 (17)3.1.5其他工具 (17)3.2<比较显示>页面 (18)3.2.1文件管理 (19)3.2.2工具 (19)3.2.3比较 (19)3.2.4比较模式和上下限、百分比误差设置 (19)3.3<档显示>页面 (19)3.4<统计显示>页面 (21)3.4.1边界模式和其相应值的设定 (21)3.4.2统计状态 (21)3.4.3统计分析参数说明 (21)3.4.4工具 (22)3.4.5文件 (22)3.5<测量设置>页面 (22)3.6<TC/Δt设置>页面 (24)3.6.1温度校正(Temperature Correction 简称TC) (25)3.6.2温度转换(temperature conversion 简称t ) (25)3.6.3温度传感器的类型 (26)3.6.4参数设定 (27)3.6.5文件 (27)3.7<档设置>页面 (27)3.7.1文件 (29)3.7.2工具 (29)第4章系统设置和文件管理 (30)4.1系统设置 (30)4.1.1触摸音 (30)4.1.2语言 (30)4.1.3口令 (31)4.1.4总线模式 (31)4.1.5波特率 (32)4.1.6总线地址 (32)4.1.7EOC信号 (32)4.1.8Err.OUT信号 (33)4.1.9电源频率 (34)4.1.10时间和日期设定 (34)4.2<文件管理>功能页面 (34)4.2.1存储/调用功能简介 (34)4.2.2U盘上的文件夹/文件结构 (35)4.2.3DHCP (39)4.2.4IP地址 (40)4.2.5子网掩码 (40)4.2.6网关 (40)4.2.7首选DNS、备用DNS (40)第5章性能指标 (41)5.1测量功能 (41)5.1.1测量参数及符号 (41)5.1.2测量组合 (41)5.1.3等效方式 (41)5.1.4量程 (41)5.1.5触发 (41)5.1.6测试端方式 (41)5.1.7测量中的各种时间的开销 (41)5.1.8平均 (42)5.1.9显示的位数 (42)5.2测试信号 (42)5.2.1量程电流 (42)5.2.2开路输出电压 (42)5.2.3测量显示最大范围 (42)5.3测量准确度 (43)5.3.2温度测量的准确度(Pt500) (44)5.3.3温度测量的准确度(模拟输入) (45)5.3.4温度修正系数K (45)第6章远程控制 (46)6.1RS232C接口说明 (46)6.2GPIB接口说明(选购件) (47)6.2.1GPIB接口功能 (49)6.2.2GPIB 地址 (49)6.2.3GPIB总线功能 (49)6.2.4可编程仪器命令标准(SCPI) (50)6.3LAN远程控制系统 (50)6.3.1通过浏览器访问TH2515 (52)6.3.2通过上位机软件访问TH2515 (52)6.4USBTMC远程控制系统 (53)6.4.1系统配置 (53)6.4.2安装驱动 (53)6.5USBVCOM虚拟串口 (54)6.5.1系统配置 (54)6.5.2安装驱动 (54)第7章RS232命令参考 (55)7.1SCPI系统命令 (55)7.1.1DISPlay子系统命令集 (55)7.1.2FUNCtion 子系统命令集 (56)7.1.3APERture子系统命令集 (61)7.1.4TRIGer子系统命令集 (61)7.1.5FETCh?子系统命令集 (63)7.1.6TEMPerature子系统命令集 (64)7.1.7COMParator子系统命令集 (66)7.1.8BIN子系统命令集 (69)7.1.9STA Tistics子系统命令集 (73)7.1.10IO子系统命令集 (76)7.1.11MEMory子系统命令集 (77)7.1.12SYSTem 子系统命令集 (78)7.1.13SCPI公用命令 (81)7.2MODBUS系统命令 (83)7.2.1MODBUS协议说明 (84)7.2.2公用指令操作说明 (85)7.2.3DISP指令操作说明 (86)7.2.4FUNC指令操作说明 (86)7.2.5APER指令操作说明 (87)7.2.6TRIG指令操作说明 (87)7.2.7FETC指令操作说明 (88)7.2.8TEMP指令操作说明 (88)7.2.10BIN指令操作说明 (90)7.2.11STA T指令操作说明 (93)7.2.12IO指令操作说明 (94)7.2.13SYST指令操作说明 (94)第8章Handler接口使用说明及程序升级方法 (99)第9章包装及保修 (103)9.1标志 (103)9.2包装 (103)9.3运输 (103)9.4贮存 (103)9.5保修 (103)本说明书所描述的可能并非仪器所有内容,同惠公司有权对本产品的性能、功能、内部结构、外观、附件、包装物等进行改进和提高而不作另行说明!由此引起的说明书与仪器不一致的困惑,可通过封面的地址与我公司进行联系。

智能王MR-170目前的国内PDA市场可以用“群雄逐鹿”来形容,这其中以名人和商务通的争夺最为激烈。
气势恢宏的场面、高深莫测的武功、通天彻地的功能、央视当红小生……这是名人智能王的广告所带给我们的震撼。
本刊评测室现在拿到了名人公司这款最新的掌上电脑——智能王MR-170。
下面我们就来看看这款产品是不是真的那么智能。
外观这款产品给人的第一印象就是“娇小玲珑”(尺寸为96mm×65mm×14mm,重量仅为80g)。
其流线型的超薄机身以及可以更换的涂色外壳(换取涂色外壳38元/个)更使得它成为随身携带PDA的首选。
整个智能王的外观设计与Palm掌上电脑的产品十分类似,在它的屏幕下方呈圆弧形地整齐排列着6个精致的小按钮,从左向右的功能分别为夜光、智能提醒、向上键、向下键、近访电话簿和百家姓。
通过这些按键你可以轻松地实现相应功能,不过遗憾的是这些按键并不能像Palm掌上电脑那样自行设定功能。
在机身左侧面有一个滚轮按键,这就是整个智能王的精华所在,能实现上下和往里三方向的操作,以实现不同的功能,与索尼(SONY)公司独家开发的“Jog Dial”有异曲同工之妙。
机身右侧的手写笔插槽贯穿整个机身,并且手写笔采用两段伸缩式设计,能令手形各异的用户都能操作自如。
“退出”按键位于手写笔插槽下方,简洁而实用。
功能众所周知,丢失用户资料是PDA产品的大忌,因此智能王采用了512KB Flash ROM,确保不会发生因缺电而丢失资料的情况。
在智能王中,我们可以存储约二十几万个汉字,可以进行电话、行程、记事、提醒、联系资料等数据的存储。
而智能王的显示屏为16×16点阵,可以每屏显示100个字(10×10字/行)。
与商务通MBA606相比,智能王显示的字体更加精致小巧,而且非常有质感。
在屏幕的下端从左至右分别有下面的功能触摸按钮:夜光:方便用户在黑暗的环境中使用。
夜光使用的最长时间为8分钟,而且可以自行设定夜光使用时间,而商务通MBA606的夜光时间则是不能自行设定的。

商品编码部件产品名称Q1对应编码Q1对应配件名称CPUSPT0CPU0002H Inspur NF8460M3,NF8465M3Inbbb Xeon E7-4809v2(6C,105W,1.9GHz)Processor Option Kit BCX305XeonE7-4809v2(1.9GHz/6c)/6.4GT/12ML3 SPT0CPU0002I Inspur NF8460M3,NF8465M3Inbbb Xeon E7-4820v2(8C,105W,2.0GHz)Processor Option Kit BCX306XeonE7-4820v2(2.00GHz/8c)/7.2GT/16ML3 SPT0CPU0002J Inspur NF8460M3,NF8465M3Inbbb Xeon E7-4830v2(10C,105W,2.2GHz)Processor Option Kit BCX307XeonE7-4830v2(2.2GHz/10c)/7.2GT/20ML3 SPT0CPU0002K Inspur NF8460M3,NF8465M3Inbbb Xeon E7-4850v2(12C,105W,2.4GHz)Processor Option Kit BCX308XeonE7-4850v2(2.3GHz/12c)/7.2GT/24ML3 SPT0CPU0002L Inspur NF8460M3,NF8465M3Inbbb Xeon E7-4860v2(12C,130W,2.6GHz)Processor Option Kit BCX309XeonE7-4860v2(2.6GHz/12c)/8.0GT/30ML3 SPT0CPU0002M Inspur NF8460M3,NF8465M3Inbbb Xeon E7-4870v2(15C,130W,2.3GHz)Processor Option Kit BCX310XeonE7-4870v2(2.3GHz/15c)/8.0GT/30ML3 SPT0CPU0002N Inspur NF8460M3,NF8465M3Inbbb Xeon E7-4880v2(15C,130W,2.5GHz)Processor Option Kit BCX311XeonE7-4880v2(2.5GHz/15c)/8.0GT/37.5ML3 SPT0CPU0002O Inspur NF8460M3,NF8465M3Inbbb Xeon E7-4890v2(15C,155W,2.8GHz)Processor Option Kit BCX312XeonE7-4890v2(2.8GHz/15c)/8.0GT/37.5ML3 SPT0CPU0002P Inspur NF8460M3,NF8465M3Inbbb Xeon E7-8857v2(12C,130W,3.0GHz)Processor Option Kit XeonE7-8857v2-Xeon3_8.0G_30M_12CSPT0CPU0002Q Inspur NF8460M3,NF8465M3Inbbb Xeon E7-8850v2(12C,105W,3.0GHz)Processor Option Kit BCX437XeonE7-8850v2-Xeon2.3_7.2G_24M_12C SPT0CPU0002R Inspur NF8460M3,NF8465M3Inbbb Xeon E7-8870v2(15C,130w,2.3GHz)Processor Option Kit XeonE7-8870v2-Xeon2.3_8.0G_30M_15CSPT0CPU0002S Inspur NF8460M3,NF8465M3Inbbb Xeon E7-8891v2(10C,155W,3.2GHz)Processor Option Kit XeonE7-8891v2-Xeon3.2_8G_37.5M_10CSPT0CPU0002T Inspur NF8460M3,NF8465M3Inbbb Xeon E7-8893v2(6C,155W,3.4GHz)Processor Option Kit XeonE7-8893v2-Xeon3.4_8G_37.5M_6CSPT0CPU0002U Inspur NF8460M4,NF8465M4Inbbb Xeon E7-4809v3(8C,115W,2.0GHz)Processor Option Kit BCX377XeonE7-4809v3(2.0GHz/8c)/6.4GT/20ML3 SPT0CPU0002V Inspur NF8460M4,NF8465M4Inbbb Xeon E7-4820v3(10C,115W,1.9GHz)Processor Option Kit BCX376XeonE7-4820v3(1.9GHz/10c)/6.4GT/25ML3 SPT0CPU0002W Inspur NF8460M4,NF8465M4Inbbb Xeon E7-4830v3(12C,115W,2.1GHz)Processor Option Kit BCX375XeonE7-4830v3(2.1GHz/12c)/8.0GT/30ML3 SPT0CPU0002X Inspur NF8460M4,NF8465M4Inbbb Xeon E7-4850v3(14C,115W,2.2GHz)Processor Option Kit BCX374XeonE7-4850v3(2.2GHz/14c)/8.0GT/35ML3 SPT0CPU0002Y Inspur NF8460M4,NF8465M4Inbbb Xeon E7-8860v3(16C,140W,2.2GHz)Processor Option Kit BCX373XeonE7-8860v3(2.2GHz/16c)/9.6GT/40ML3 SPT0CPU00030Inspur NF8460M4,NF8465M4Inbbb Xeon E7-8870v3(18C,140W,2.1GHz)Processor Option Kit BCX372XeonE7-8870v3(2.1GHz/18c)/9.6GT/45ML3 SPT0CPU00032Inspur NF8460M4,NF8465M4Inbbb Xeon E7-8880v3(18C,150W,2.3GHz)Processor Option Kit BCX371XeonE7-8880v3(2.3GHz/18c)/9.6GT/45ML3 SPT0CPU00033Inspur NF8460M4,NF8465M4Inbbb Xeon E7-8890v3(18C,165W,2.5GHz)Processor Option Kit BCX370XeonE7-8890v3(2.5GHz/18c)/9.6GT/45ML3 SPT0CPU0002Z Inspur NF8460M4,NF8465M4Inbbb Xeon E7-8867v3(16C,165W,2.5GHz)Processor Option Kit BCX369XeonE7-8867v3(2.5GHz/16c)/9.6GT45ML3 SPT0CPU00034Inspur NF8460M4,NF8465M4Inbbb Xeon E7-8891v3(10C,165W,2.8GHz)Processor Option Kit BCX368XeonE7-8891v3(2.8GHZ/10c)/9.6GT/45ML3 SPT0CPU00035Inspur NF8460M4,NF8465M4Inbbb Xeon E7-8893v3(4C,140W,3.2GHz)Processor Option Kit BCX367XeonE7-8893v3(3.2GHz/4c)/9.6GT/45ML3 SPT0CPU00003Inspur NF5280M4,NF5270M4Inbbb Xeon E5-2609v3(6C,85W,1.9GHz)Processor Option Kit BCX323E5-2609v3(1.9GHz/6c)/6.4GT/15ML3SPT0CPU00004Inspur NF5280M4,NF5270M4Inbbb Xeon E5-2620v3(6C,85W,2.4GHz)Processor Option Kit BCX324E5-2620v3(2.4GHz/6c)/8GT/15ML3SPT0CPU00005Inspur NF5280M4,NF5270M4Inbbb Xeon E5-2630v3(8C,85W,2.4GHz)Processor Option Kit BCX325E5-2630v3(2.4GHz/8c)/8GT/20ML3SPT0CPU00006Inspur NF5280M4,NF5270M4Inbbb Xeon E5-2637v3(4C,135W,3.5GHz)Processor Option Kit E5-2637v3(3.5GHz/4c)/9.6GT/15ML3SPT0CPU00007Inspur NF5280M4,NF5270M4Inbbb Xeon E5-2640v3(8C,90W,2.6GHz)Processor Option Kit BCX326E5-2640v3(2.6GHz/8c)/8GT/20ML3SPT0CPU00008Inspur NF5280M4,NF5270M4Inbbb Xeon E5-2643v3(6C,135W,3.4GHz)Processor Option Kit BCX339E5-2643v3(3.4GHz/6c)/9.6GT/20ML3SPT0CPU00009Inspur NF5280M4,NF5270M4Inbbb Xeon E5-2650v3(10C,105W,2.3GHz)Processor Option Kit BCX327E5-2650v3(2.3GHz/10c)9.6GT/25ML3SPT0CPU00010Inspur NF5280M4,NF5270M4Inbbb Xeon E5-2660v3(10C,105W,2.6GHz)Processor Option Kit BCX328E5-2660v3(2.6GHz/10c)9.6GT/25ML3 SPT0CPU00011Inspur NF5280M4,NF5270M4Inbbb Xeon E5-2667v3(8C,135W,3.2GHz)Processor Option Kit E5-2667v3(3.2GHz/8c)9.6GT/20ML3SPT0CPU00012Inspur NF5280M4,NF5270M4Inbbb Xeon E5-2670v3(12C,120W,2.3GHz)Processor Option Kit BCX329E5-2670v3(2.3GHz/12c)9.6GT/30ML3 SPT0CPU00013Inspur NF5280M4,NF5270M4Inbbb Xeon E5-2680v3(12C,120W,2.5GHz)Processor Option Kit BCX330E5-2680v3(2.5GHz/12c)9.6GT/30ML3 SPT0CPU00015Inspur NF5280M4,NF5270M4Inbbb Xeon E5-2690v3(12C,135W,2.6GHz)Processor Option Kit BCX331E5-2690v3(2.6GHz/12c)9.6GT/30ML3 SPT0CPU00016Inspur NF5280M4,NF5270M4Inbbb Xeon E5-2695v3(14C,120W,2.3GHz)Processor Option Kit BCX333E5-2695v3(2.3GHz/14c)9.6GT/35ML3 SPT0CPU00017Inspur NF5280M4Inbbb Xeon E5-2697v3(14C,145W,2.6GHz)Processor Option Kit BCX334E5-2697v3(2.6GHz/14c)9.6GT/35ML3SPT0CPU00018Inspur NF5280M4Inbbb Xeon E5-2698v3(16C,135W,2.3GHz)Processor Option Kit BCX335E5-2698v3(2.3GHz/16c)9.6GT/40MLSPT0CPU00019Inspur NF5280M4Inbbb Xeon E5-2699v3(18C,145W,2.3GHz)Processor Option Kit E5-2699v3(2.3GHz/18c)9.6GT/45ML3SPT0CPU00014Inspur NF5280M4,NF5270M4Inbbb Xeon E5-2683v3(14C,120W,2.0GHz)Processor Option Kit E5-2683v3(2.0GHz/14C)/9.6GT/35ML3 BCX438XeonE3-1220V5(3.0GHZ)/8M/4CBCX439XeonE3-1230V5(3.40GHZ)/8M/4CBCX440XeonE3-1240V5(3.50GHZ)/8M/4CBCX441XeonE3-1240LV5(2.10GHZ)/8M/4CBCX442XeonE3-1260LV5(2.90GHZ)/8M/4CBCX443XeonE3-1270V5(3.60GHZ)/8M/4CBCX444XeonE3-1280V5(3.70GHZ)/8M/4CBCX445i3-6320(3.9GHz)/4M/2CBCX446i3-6300T(3.3GHz)/4M/2CBCX447i3-6300(3.8GHz)/4M/2CBCX448i3-6100T(3.2GHz)/3M/2CBCX449i3-6100(3.7GHz)/3M/2CBCX450G4520(3.0GHz)/3M/2CBCX451G4500T(3.0GHz)/3M/2CBCX452G4500(3.5GHz)/3M/2CBCX453G4400(3.3GHz)/3M/2CBCX322E5-2603v3(1.6GHz/6c)/6.4GT/15ML3BCX401E5-2603v4(1.7GHz/6c)/6.4GT/15ML3BCX402E5-2609v4(1.7GHz/8c)/6.4GT/20ML3BCX403E5-2620v4(2.1GHz/8c)/8GT/20ML3BCX406E5-2630v4(2.2GHz/10c)/8GT/25ML3BCX408E5-2640v4(2.4GHz/10c)/8GT/25ML3BCX412E5-2650v4(2.2GHz/12c)9.6GT/30ML3BCX414E5-2660v4(2.0GHz/14c)9.6GT/35ML3 BCX416E5-2680v4(2.4GHz/14c)9.6GT/35ML3 BCX419E5-2690v4(2.6GHz/14c)9.6GT/35ML3 BCX404E5-2623v4(2.6GHz/4c)8.0GT/10ML3 BCX407E5-2637v4(3.5GHz/4c)/9.6GT/15ML3 BCX409E5-2643v4(3.4GHz/6c)/9.6GT/20ML3 BCX415E5-2667v4(3.2GHz/8c)9.6GT/25ML3 BCX417E5-2683v4(2.1GHz/16c)/9.6GT/40ML3 BCX420E5-2695v4(2.1GHz/18c)9.6GT/45ML3 BCX422E5-2697v4(2.3GHz/18c)9.6GT/45ML3 BCX421E5-2697Av4(2.6GHz/16c)9.6GT/40ML3 BCX423E5-2698v4(2.2GHz/20c)9.6GT/50ML BCX424E5-2699v4(2.2GHz/22c)9.6GT/55ML3 BCX405E5-2630LV4(1.8GHz/10c)8.0GT/25ML3 BCX411E5-2650LV4(1.7GHz/14c)9.6GT/35ML3 BCX410E5-2648LV4(1.8GHz/14c)9.6GT/35ML3 BCX413E5-2658V4(2.3GHz/14c)9.6GT/35ML3 BCX418E5-2687WV4(3.0GHz/12c)9.6GT/35ML3 BCX425XeonE7-4809v4(2.1GHz/8C)/6.4GT/20ML3 BCX426XeonE7-4820v4(2.0GHz/10C)/6.4GT/25ML3 BCX427XeonE7-4830v4(2.0GHz/14C)/8.0GT/35ML3 BCX428XeonE7-4850v4(2.1GHz/16C)/8.0GT/40ML3 BCX429XeonE7-8860v4(2.2GHz/18C)/9.6GT/45ML3 BCX430XeonE7-8855v4(2.1GHz/14C)/8.0GT/35ML3 BCX431XeonE7-8867v4(2.4GHz/18C)/9.6GT/45ML3 BCX432XeonE7-8870v4(2.1GHz/20C)/9.6GT/50ML3 BCX433XeonE7-8880v4(2.2GHz/22C)/9.6GT/55ML3 BCX434XeonE7-8890v4(2.2GHz/24C)/9.6GT/60ML3 BCX435XeonE7-8891v4(2.8GHz/10C)/9.6GT/60ML3 BCX436XeonE7-8893v4(3.2GHz/4C)/9.6GT/60ML3 DDR3内存SPT0MEM00006Inspur32GB DDR3L-1600LRDIMM SPT0MEM00007Inspur16GB DDR3-1866RDIMMSPT0MEM00008Inspur16GB DDR3-1600RDIMMSPT0MEM00009Inspur16GB DDR3L-1600RDIMMSPT0MEM0000A Inspur8GB DDR3-1600RDIMMSPT0MEM0000B Inspur8GB DDR3L-1600RDIMMSPT0MEM0000C Inspur4GB DDR3-1600RDIMMSPT0MEM0000D Inspur4GB DDR3L-1600RDIMMDDR4内存DDR4内存BMD1558G_DDR4_UDIMM-EUBMD15616G_DDR4_UDIMM-EUSPT0MEM00002Inspur8GB DDR4-2133MHz(1Rx4)RDIMM BMD1418G RDIMM DDR4内存SPT0MEM00001Inspur16GB DDR4-2133MHz(2Rx4)RDIMM BMD14216G RDIMM DDR4内存SPT0MEM00003Inspur16GB DDR4-2133MHz(1Rx4)RDIMMSPT0MEM00004Inspur32GB DDR4-2133MHz(2Rx4)RDIMM BMD14332G LRDIMM DDR4内存SPT0MEM00005Inspur32GB DDR4-2133MHz(4Rx4)LRDIMM3.5寸企业级SATA(含托架及包装)3.5寸企业级SATA(含托架及包装)SPT0STG35007Inspur3.5"1TB7.2K Enterprise SATA6Gbps Hot Swap Hard Drive BHT0231TB SATA(企业级)SPT0STG35001Inspur3.5"2TB7.2K Enterprise SATA6Gbps Hot Swap Hard Drive BHT0422TB SATA(企业级)SPT0STG35006Inspur3.5"3TB7.2K Enterprise SATA6Gbps Hot Swap Hard Drive BHT0703TB SATA(企业级)SPT0STG35005Inspur3.5"4TB7.2K Enterprise SATA6Gbps Hot Swap Hard Drive BHT0834TB SATA(企业级)SPT0STG35003Inspur3.5"6TB7.2K Enterprise SATA6Gbps Hot Swap Hard Drive BHT1076TB SATA(企业级)SPT0STG35002Inspur3.5"8TB7.2K Enterprise SATA6Gbps Hot Swap Hard Drive8TB SATA(企业级)2.5寸企业级SATA(含托架及包装)2.5寸企业级SATA(含托架及包装)SPT0STG25006Inspur2.5"500GB7.2K Enterprise SATA6Gbps Hot Swap Hard Drive BHT062500GB SATA 2.5"(企业级)SPT0STG25005Inspur2.5"1TB7.2K Enterprise SATA6Gbps Hot Swap Hard Drive BHT0611TB SATA 2.5"(企业级)SPT0STG25004Inspur2.5''2TB7.2K Enterprise SATA6Gbps Hot Swap HardDrive2TB SATA 2.5"(企业级)2.5寸SAS(含托架及包装)2.5寸SAS(含托架及包装)7,200RPM7,204RPMSPT0STG25S03Inspur2.5"1TB7.2K Enterprise SAS12Gbps Hot Swap Hard Drive BSA0531TB SAS硬盘2.5"SPT0STG25S05Inspur2.5"1TB7.2K Enterprise SAS6Gbps Hot Swap Hard Drive BSA0531TB SAS硬盘2.5"SPT0STG25S01Inspur2.5"2TB7.2K Enterprise SAS12Gbps Hot Swap Hard Drive2TB SAS硬盘2.5"10,000RPM10,004RPMSPT0STG25001Inspur2.5"1.2TB10K Enterprise SAS12Gbps Hot Swap Hard Drive BSA0841.2T热插拔SAS硬盘(1万转)2.5" SPT0STG25002Inspur2.5"1.2TB10K Enterprise SAS6Gbps Hot Swap Hard Drive BSA0841.2T热插拔SAS硬盘(1万转)2.5"SPT0STG25S02Inspur2.5"1.8TB10K Enterprise SAS12Gbps Hot Swap Hard Drive BSA1091.8T热插拔SAS硬盘(1万转)2.5"SPT0STG25S0E Inspur2.5"300GB10K Enterprise SAS12Gbps Hot Swap Hard Drive BSA023300G热插拔SAS硬盘(1万转)2.5"SPT0STG25S0G Inspur2.5"300GB10K Enterprise SAS6Gbps Hot Swap Hard Drive BSA023300G热插拔SAS硬盘(1万转)2.5"SPT0STG25S08Inspur2.5"600GB10K Enterprise SAS12Gbps Hot Swap Hard Drive BSA036600G热插拔SAS硬盘(1万转)2.5"SPT0STG25S09Inspur2.5"600GB10K Enterprise SAS6Gbps Hot Swap Hard Drive BSA036600G热插拔SAS硬盘(1万转)2.5"SPT0STG25S04Inspur2.5"900GB10K Enterprise SAS12Gbps Hot Swap Hard Drive BSA057900G热插拔SAS硬盘(1万转)2.5"SPT0STG25S06Inspur2.5"900GB10K Enterprise SAS6Gbps Hot Swap Hard Drive BSA057900G热插拔SAS硬盘(1万转)2.5"15,000RPM15,004RPMSPT0STG25S0D Inspur2.5"300GB15K Enterprise SAS12Gbps Hot Swap Hard Drive BSA059300G热插拔SAS硬盘(1万5千转)2.5"希捷SPT0STG25S0F Inspur2.5"300GB15K Enterprise SAS6Gbps Hot Swap Hard Drive BSA059300G热插拔SAS硬盘(1万5千转)2.5"希捷SPT0STG25S07Inspur2.5"600GB15K Enterprise SAS12Gbps Hot Swap Hard Drive BSA108600G热插拔SAS硬盘(1万5千转)2.5"日立SPT0STG25003Inspur2.5"600GB15K Enterprise SAS6Gbps Hot Swap Hard Drive600G热插拔SAS硬盘(1万5千转)2.5"日立3.5寸SAS(含托架及包装)3.5寸SAS(含托架及包装)SPT0STG35S09Inspur3.5"1TB7.2K Enterprise SAS6Gbps Hot Swap Hard Drive TYP0231TB SAS硬盘SPT0STG35S08Inspur3.5"2TB7.2K Enterprise SAS6Gbps Hot Swap Hard Drive BSA0762TB SAS硬盘SPT0STG35S05Inspur3.5"2TB7.2K Enterprose SAS12Gbps Hot Swap Hard Drive BSA0762TB SAS硬盘SPT0STG35S07Inspur3.5"3TB7.2K Enterprise SAS6Gbps Hot Swap Hard Drive TCP0493TB SAS硬盘SPT0STG35S04Inspur3.5"3TB7.2K Enterprose SAS12Gbps Hot Swap Hard Drive TCP0493TB SAS硬盘SPT0STG35S06Inspur3.5"4TB7.2K Enterprise SAS6Gbps Hot Swap Hard Drive BSA1064TB SAS硬盘SPT0STG35S03Inspur3.5"4TB7.2K Enterprose SAS12Gbps Hot Swap Hard Drive BSA1064TB SAS硬盘SPT0STG35S01Inspur3.5"6TB7.2K Enterprose SAS12Gbps Hot Swap Hard Drive6TB SAS硬盘3.5寸硬盘托架,2.5寸SAS硬盘7,200RPM7,204RPMSPT0STG25S0N Inspur2.5"1TB7.2K Enterprise SAS12Gbps Hot Swap HDD in3.5"Tray BSA0531TB SAS硬盘2.5"SPT0STG25S0P Inspur2.5"1TB7.2K Enterprise SAS6Gbps Hot Swap HDD in3.5"Tray BSA0531TB SAS硬盘2.5"SPT0STG25S0H Inspur2.5"2TB7.2K Enterprise SAS12Gbps Hot Swap HDD in3.5"Tray2TB SAS硬盘2.5"10,000RPM10,004RPMSPT0STG25S0K Inspur2.5"1.2TB10K Enterprise SAS12Gbps Hot Swap HDD in3.5"Tray BSA0841.2T热插拔SAS硬盘(1万转)2.5"SPT0STG25S0M Inspur2.5"1.2TB10K Enterprise SAS6Gbps Hot Swap HDD in3.5"Tray BSA0841.2T热插拔SAS硬盘(1万转)2.5"SPT0STG25S0J Inspur2.5"1.8TB10K Enterprise SAS12Gbps Hot Swap HDD in3.5"Tray BSA1091.8T热插拔SAS硬盘(1万转)2.5"SPT0STG25S11Inspur2.5"300GB10K Enterprise SAS12Gbps Hot Swap HDD in3.5"Tray BSA023300G热插拔SAS硬盘(1万转)2.5" SPT0STG25S13Inspur2.5"300GB10K Enterprise SAS6Gbps Hot Swap HDD in3.5"Tray BSA023300G热插拔SAS硬盘(1万转)2.5" SPT0STG25S0T Inspur2.5"600GB10K Enterprise SAS12Gbps Hot Swap HDD in3.5"Tray BSA036600G热插拔SAS硬盘(1万转)2.5"SPT0STG25S0V Inspur2.5"600GB10K Enterprise SAS6Gbps Hot Swap HDD in3.5"Tray BSA036600G热插拔SAS硬盘(1万转)2.5"SPT0STG25S0Q Inspur2.5"900GB10K Enterprise SAS12Gbps Hot Swap HDD in3.5"Tray BSA057900G热插拔SAS硬盘(1万转)2.5"SPT0STG25S0R Inspur2.5"900GB10K Enterprise SAS6Gbps Hot Swap HDD in3.5"Tray BSA057900G热插拔SAS硬盘(1万转)2.5"15,000RPM15,004RPMSPT0STG25S0Z Inspur2.5"300GB15K Enterprise SAS12Gbps Hot Swap HDD in3.5"Tray BSA059300G热插拔SAS硬盘(1万5千转)2.5"希捷SPT0STG25S12Inspur2.5"300GB15K Enterprise SAS6Gbps Hot Swap HDD in3.5"Tray BSA059300G热插拔SAS硬盘(1万5千转)2.5"希捷SPT0STG25S0S Inspur2.5"600GB15K Enterprise SAS12Gbps Hot Swap HDD in3.5"Tray BSA108600G热插拔SAS硬盘(1万5千转)2.5"日立SPT0STG25S0U Inspur2.5"600GB15K Enterprise SAS6Gbps Hot Swap HDD in3.5"Tray600G热插拔SAS硬盘(1万5千转)2.5"日立3.5寸云盘和归档盘(含托架及包装)3.5寸云盘和归档盘(含托架及包装)SPT0STG3500A Inspur3.5"4TB7.2K Cloud Storage SATA6Gbps Hot Swap Hard Drive4T云盘(7200转)V03ZVSPT0STG3500E Inspur3.5"4TB5.9K Cloud Storage SATA6Gbps Hot Swap Hard Drive4T云盘(5900转)_W0CCP0B0000060053.5寸硬盘托架,2.5寸企业级SATA3.5寸硬盘托架,2.5寸企业级SATASPT0STG25008Inspur2.5"2TB7.2K Enterprise SATA6Gbps Hot Swap Hard Drive in3.5"tray2TB SATA 2.5"(企业级)SPT0STG25009Inspur2.5"1TB7.2K Enterprise SATA6Gbps Hot Swap Hard Drive in3.5"tray1TB SATA 2.5"(企业级)SPT0STG2500A Inspur2.5"500GB7.2K Enterprise SATA6Gbps Hot Swap Hard Drive in3.5"tray500GB SATA 2.5"(企业级)PCIE SSD卡PCIE SSD卡BHD025400G MLC SSD PCIe接口BHD026600G MLC SSD PCIe接口BHD024800G MLC SSD PCIe接口BHD0231.2T MLC SSD PCIe接口BHD0272.4T MLC SSD PCIe接口其他硬盘及组件其他硬盘及组件BHE00264G SATA-DOM硬盘BHD02880G MLC SSD 2.5BHD029120G MLC SSD 2.5BHD004160G MLC SSD 2.5BHD030240G MLC SSD 2.5BHD010300G MLC SSD 2.5BHD016480G MLC SSD 2.5BHD009600G MLC SSD 2.5BHD019800G MLC SSD 2.5TYP004500GB SATA(桌面级)BPT0201T SATA(桌面级)BSA012300G热插拔SAS硬盘(1万5千转)RAID卡RAID卡SPT0POC00R06Inspur SAS3008iMR12Gbps PCIe Adapter BSS012INSPUR八通道高性能SAS3008卡IMR(可选Raid key)SPT0THR00K02Inspur RAID5Upgrate key for SAS3008iMR12Gbps PCIe Adapter BSS013INSPUR八通道高性能3008Raid KeySPT0POC00R02Inspur RAID1GB9271-8i6Gbps PCIe Adapter by Avago BRE028八通道SAS高性能RAID-9271(1G缓存)SPT0THR00D02Inspur iBBU09Battery Backup Unit Upgrade for RAID2208MR,9271-8i PCIe Adapter BDC020八通道SAS高性能RAID-9271电池SPT0THR00D05Inspur Supercapacitor Upgrade for RAID2208MR,9271-8i PCIe Adapter BDC022八通道SAS高性能RAID-9271缓存断电保护模块SPT0THR00K03Inspur RAID CacheCade Pro2.0Key for2208MR,3108MR,9271-8i,9361-8i BRE032RAID卡功能模块-CacheCade模块SPT0POC00R0G Inspur RAID2GB PM806012Gbps PCIe Adapter BDC027INSPUR八通道高性能SAS RAID卡RS0820P(2G缓存)SPT0THR00D01Inspur Supercapacitor for RAID PM8060(1GB,2GB)PCIe Adapter by Adaptec BRE038INSPUR八通道高性能SAS RS0810P缓存断电保护模块SPT0POC00R09Inspur RAID1GB9361-8i12Gbps PCIe Adapter by Avago BRE034八通道SAS高性能RAID-9361(1G缓存)SPT0THR00D03Inspur Supercapacitor Upgrade for RAID1GB9361-8i PCIe Adapter by LSI BDC026八通道SAS高性能RAID-9361(1G缓存)缓存断电保护模块SPT0POC00R08Inspur RAID2GB9361-8i12Gbps PCIe Adapter by Avago BRD036八通道SAS高性能RAID-9361(2G缓存)SPT0THR00D04Inspur Supercapacitor Upgrade for RAID9361-8i(2GB),3108MR(2GB,4GB)by LSI BDC025八通道SAS高性能RAID-9361(2G缓存)缓存断电保护模块SPT0POC00R07Inspur RAID4GB9364-8i12Gbps PCIe Adapter by Avago BRD037八通道SAS高性能LSI RAID-9364(4G缓存+缓存断电保护模块)SPT0POC00R0A Inspur RAID4GB3108MR12Gbps PCIe Adapter BRE040INSPUR八通道高性能SAS RAID卡RS0840L3(4G缓存)电源电源SPT0PSU00001Inspur CRPS800W Platinum Hot Swap Power SupplySPT0PSU00002Inspur CRPS1200W Platinum Hot Swap Power SupplySPT0PSU00003Inspur CRPS550W Platinum Hot Swap Power SupplySPT0PSU00004Inspur CRPS800W Titanium Hot Swap Power SupplySPT0PSU00005Inspur CRPS800W-48VDC Hot Swap Power SupplySPT0PSU00006Inspur CRPS800W336VDC Hot Swap Power SupplyBDY096300W电源适用于NP3020M4BDY097550W白金电源适用于NP3020M4光纤通道连接配件光纤通道连接配件SPT0POC00B01Inspur LPe1250Single Port8Gb Fibre Channel HBA by Emulex TAF019光纤通道HBA卡,FC8Gb,单端口,LC接口SPT0POC00B02Inspur LPe12002Dual Port8Gb Fibre Channel HBA by Emulex TAF021光纤通道HBA卡,FC8Gb,双端口,LC接口SPT0POC00B05Inspur QLE2560Single Port8Gb Fibre Channel HBA by Qlogic TAF019光纤通道HBA卡,FC8Gb,单端口,LC接口SPT0POC00B06Inspur QLE2562Dual Port8Gb Fibre Channel HBA by Qlogic TAF021光纤通道HBA卡,FC8Gb,双端口,LC接口SPT0POC00B03Inspur LPe16000B Single Port16Gb Fibre Channel HBA by Emulex TAF028光纤通道HBA卡,FC16Gb,单端口,LC接口SPT0POC00B07Inspur QLE2670Single Port16Gb Fibre Channel HBA by Qlogic TAF028光纤通道HBA卡,FC16Gb,单端口,LC接口SPT0POC00B04Inspur LPe16002B Dual Port16Gb Fibre Channel Adapter by Emulex TAF029光纤通道HBA卡,FC16Gb,双端口,LC接口转接卡转接卡BKZ013PCI-E转接卡套件(NF8460M3)PCI-E转接卡套件(NF8460M4)网卡及远程管理卡网卡及远程管理卡SPT0POC00W01Inspur I350PCIe1Gb2Port Base-T Ethernet Adapter BNT004双口千兆网卡(RJ45接口)SPT0POC00W02Inspur I350PCIe1Gb4Port Base-T Ethernet Adapter BNT010四口千兆网卡(RJ45接口)SPT0POC00W06Inspur I350PCIe1Gb4Port SPF Ethernet Adapter BNT042四口千兆网卡(光纤接口)SPT0POC00W07Inspur82599ES PCIe10Gb1Port with Multi-mode SFP+module Ethernet Adapter单口万兆网卡(光纤接口含多模模块)SPT0POC00W09Inspur MCX312B-XCCT PCIe10Gb2Port SFP+Ethernet Adapter BNT009双口万兆网卡(光纤接口)SPT0POC00W08Inspur82599ES PCIe10Gb2Port with Multi-mode SFP+module Ethernet Adapter双口万兆网卡(光纤接口含多模模块)SPT0POC00W0J Inspur X710PCIe x8+x110Gb2Port SFP+Ethernet Daughter Card出厂前升级INSPUR双口万兆FLOM网卡(光纤接口),不含光模块SPT0POC00W0H Inspur82599ES PCIe x8+x110Gb1Port SFP+Ethernet Adapter BNT034INSPUR单口万兆网卡(光纤接口),不含光模块SPT0POC00W0K Inspur CX3PCIe x8+110Gb1Port SFP+Ethernet Adapter BNT034INSPUR单口万兆网卡(光纤接口),不含光模块SPT0POC00W0G Inspur82599ES PCIe x8+x110Gb2Port SFP+Ethernet Adapter BNT035INSPUR双口万兆网卡(光纤接口),不含光模块SPT0POC00W0L Inspur CX3PCIe x8+110Gb2Port SFP+Ethernet AdapterSPT0THR00S01Inspur1Gb Single-Mode SPF+Optical Module INSPUR千兆网卡光模块(单模,搭配INSPUR万兆网卡使用)SPT0THR00S02Inspur1Gb Multi-Mode SFP+Optical Module INSPUR千兆网卡光模块(多模,搭配INSPUR万兆网卡使用)SPT0THR00S03Inspur10Gb Single-Mode SFP+Optical Module BNT036INSPUR万兆网卡光模块(单模,搭配INSPUR万兆网卡使用)SPT0THR00S04Inspur10Gb Multi-Mode SFP+Optical Module BNT037INSPUR万兆网卡光模块(多模,搭配INSPUR万兆网卡使用)SPT0POC00W0A Inspur T580-SO-CR PCIe40Gb2Port QSFP+Ethernet Adapter BNT039双口40GbE网卡光纤接口,不含光模块,需搭配40G网卡线缆使用SPT0POC00W03Inspur X540PCIe10Gb2Port Base-T Ethernet Adapter BNT030双口万兆网卡(RJ45接口)SPT0POC00W04Inspur I350PCIe x8+11Gb4Port Base-T Ethernet Adapter出厂前升级INSPUR四口千兆网卡(RJ45接口)SPT0POC00W05Inspur X540PCIe x8+110Gb2Port Base-T Ethernet Adapter INSPUR双口万兆网卡(RJ45接口)BNT002单口千兆网卡(光纤接口)BNT005双口千兆网卡(光纤接口)BNT008单口万兆网卡(光纤接口)BNT040双口40GbE CNA网卡光纤接口,不含光模块,需搭配40G网卡线缆使用BNT04140G网卡线缆,15米Infiniband card Infiniband cardSPT0POC00C01Inspur MCX353A-FCBT56Gb1Port with QSFP Module InfiniBand Adapter TAF027HCA卡(单口IB卡56GB)SPT0POC00C02Inspur MCX353A-FCBT56Gb2Port with QSFP Module InfiniBand Adapter HCA卡(双口IB卡56GB)软驱、光驱、刻录机软驱、光驱、刻录机BHU001U盘软驱MGQ002标准DVDBCD006DVD刻录机BCD017USB DVD刻录机BCD026SLIM DVD刻录机显卡显卡BXK039显卡K420(显存1G)BXK040显卡K620(显存2G)BXK041显卡K2200(显存4G)显示器显示器BOV01419.5寸液晶显示器BOV00921.5寸液晶显示器BOV01523.6寸液晶显示器RACK机柜及组件RACK机柜及组件BOG022浪潮42U标准服务器机柜(无PDU)/2000mm×1100mm×600mm(H×D×W)BPK0396口PDU国标万用插口/10ABPK03821口PDU国标万用插口/32ABTP00140公斤机柜托盘BTP002100公斤机柜托盘BOK001键盘B0M001鼠标BOQ008四合一切换器17寸液晶8口/USBBOQ009四合一切换器17寸液晶16口/USBBOQ0018口切换器BOQ00516口切换器其他其他BPT002配件,背板_INSPUR_SAS_2.5X8BPT017硬盘模组_2.5×8BPT003配件,背板_INSPUR_SAS12G_4X3.5BPT004配件,背板_INSPUR_SAS12G_8X2.5BPT008配件,SAS线BPT010配件,风扇BPT011配件,硬盘托架_2.5寸BPT012配件,硬盘托架_3.5寸BPT013配件,包装箱BPT014配件,电源线BPT015配件,服务器用户手册及睿捷服务器套件光盘BPL001NF5270M42U前面板V08WY0208000B014SPT0BKD00001Inspur Milestone42U3.5"x4Drive Backplane Kit SPT0BKD00002Inspur Milestone42U Rear2.5"x2Drive Backplane Kit SPT0BKD00003Inspur Milestone42U2.5"x8Drive Backplane Kit。

Setup your AVer Document Camera from home!Please first identify which AVer document camera you are using to know what software to install.A+ Suite (Sphere2 on Win10/Mac) or Sphere Lite (Chromebooks): AVer U70+, AVer U50, AVer M70HD, AVer 300AFHD, AVer F70W, AVer F50-8M, AVer F17-8M, M17-13MAVerTouch (Win10/Mac): AVer M15W, AVer M15-13M, AVer M70WA+ Interactive Software (Old Version on Win/Mac): V300AF ASIC, SPC300 ASIC, SPC300 +, CP130, CP150, CP300, SPB350, SPB370, CP135, CP155, CP355, V355AF, V310AF, SPB350+, V300AF+, F30, F50, U10, U15, AP20,M50, W30Sphere (Old Version on Win/Mac): PL50, SPB350, SPB370, SPB350+, M50, M70, V300AF+, F50, F30, F15 U15, W30A+ Suite (Sphere2):1.Download the A+ Suite software on your computer, go to:https:///education/support/aplus-suiteSelect the OS you are using to download the software (we will use Win10 in this tutorial)2.Open the downloaded .exe file to start the installationFollow the setup wizard to install the A+ Suite software3.After installation is completed, open the Sphere2 software4.Plug in the power adapter to your document camera and turn it on by pressing the power button (does notapply to U-series doc cams, your document camera may look different than the one pictured)5.Locate a USB port on your computer and connect your camera to it via USB cable that is included6.Select the visualizer icon on the top right of the Sphere2 software and select your camera7.You are now connected to your AVer document camera and can begin teaching!If you own an AVer F70W and wish to connect to your computer wirelessly, please follow this guide: https:///education/downloads/F70WV2-Quick-Guide-EN-v5-2020-02-24.pdfSphere Lite (Chromebook):1.Download the Sphere Lite software on your Chromebook, go to:https:///webstore/detail/sphere-lite/bhmibpbadaengbikmoglphhlhioajdjn?hl=enunch Sphere Lite app after installing3.Plug in the power adapter to your document camera and turn it on by pressing the power button (does notapply to U-series doc cams, your document camera may look different than the one pictured)4.Locate a USB port on your Chromebook and connect your camera to it via USB cable that is included5.Select your camera on the bottom left. You are now connected to your AVer document camera and can beginteaching!AVerTouch:1.Download the AVerTouch software on your computer, go to:https:///education/support/avertouchSelect the OS you are using to download the software (we will use Win10 in this tutorial)2.Unzip the downloaded .zip file3.Open the extracted folder and run the .exe to start the installation4.Follow the setup wizard to install the AVerTouch software5.After installation is completed, open the AVerTouch software6.Plug in the power adapter to your document camera and turn it on by pressing the power button (yourdocument camera may look different than the one pictured)7.Locate a USB port on your computer and connect your camera to it via USB cable that is includedNote: For M15W/M70W users, please make sure WiFi is turned off when trying to do a USB connection 8.The connected visualizer will appear within the AVerTouch software. Click the play icon to connect to thecameraIf you own an AVer M15W/M70W and wish to connect to your computer wirelessly, please follow this guide: M15W: https:///education/downloads/M15W-instruction-manual-EN-2019-12-20.pdfM70W: https:///education/downloads/M70W-instruction-manual-EN-v1-2019-12-20.pdfA+ Interactive Software:1.Download the A+ Interactive Software on your computer, go to:https:///education/support/averplusSelect the OS you are using to download the software2.Unzip the downloaded .zip file3.Open the extracted folder and run the .exe to start the installation4.Follow the setup wizard to install the A+ Interactive Software5.After installation is completed, open the A+ Interactive Software6.Power on and connect your doc cam to your computer via USB cable7.Select your visualizer within the software and you are now connected!Sphere:1.Download the Sphere on your computer, go to:https:///education/support/sphereSelect the OS you are using to download the software2.Run the downloaded .exe to start the installation3.Follow the setup wizard to install the Sphere software4.After installation is completed, open the Sphere Software5.Power on and connect your doc cam to your computer via USB cable6.Select your visualizer within the software and you are now connected!Using your AVer Document Camera with other platforms (Zoom, Skype, Google Hangout).Open up your software of choice and connect your AVer document camera to your computer via USB cable.Select your AVer document camera as your visualizer and you are successfully connected!(Please refer to Zoom, Skype, or Hangout user guides to navigate through their software)Zoom:https:///hc/en-us/articles/201362033-Getting-Started-on-Windows-and-MacSkype:https:///en/skype/windows-desktop/start/Hangout:https:///hangouts/?hl=en#topic=6386410Note: The following AVer doc cams are not UVC compliant and are not compatible with other platforms: F50, M70, PL50, W30, W30HD, Tabcam, 355AF, M50More HelpFor FAQs, technical support, software and instruction manual download, please visit:https:///education/support/Contact InformationAVer Information Inc.668 Mission Ct. Fremont, CA 94539, USAToll-free: 1(877)528-7824Local: 1(408)263-3828********************。


多旋翼飞行器● 每次上电会自动检测输入的油门信号,然后执行相应的油门模式;● 首次使用无刷电调或更换遥控设备后需要进行油门行程校准; Dshot 模式时,将不再需要校准油门;● 当Dshot 时,建议保留电调原本的双绞信号线中的地线,确保信号选择 地线连接正常;● 请勿刷写除“Flycolor_Raptor_5” 以外的固件,以免损坏电调;● 使用BLHeli-32 程序,当电机出现异常(如启动不顺畅)或者要求达到 更高转速时,可尝试更改进角参数;● 如果需要OSD 显示电流,请选用带电流计的飞控或者分电板;● 无论任何时候都要注意极性,供电之前一定要反复检查;4. 此时电机准备3. 当油门摇杆高于中间位置 (检测最大油门)正在检测1. 启动功率(Rampup power ):启动功率可以设置为从3%-150%的相对值。
这是在启动和提高转速时允许最大功率。
对于低转速,为了便于低反电动势电压检测,最大功率是被限制的。
启动功率也影响双向操作,参数是用来限制在更改转向时的功率。
在启动过程中,实际的功率取决于油门输入,可低于设定的最大启动功率,但最低是设定的四分之一。
2. 电机进角(Motor timing ):电机进角可以设置为: 自动 或1°-31°,通常设置中等数值进角即适用于大部分电机,但如果电机运转不顺畅时,可以尝试改变进角。
对于一些高感电机,其换向退磁时间 较长,尤其在低速运转的时候,电机会在油门快速增加的情况下停转或者不顺畅。
将进角改高会有有助于改善这个现象,因为高进角允许更长的换向退磁时间。
3.PWM 频率(PWM frequency ):PWM frequency low - 低频率在低油门最需要的时候提供良好的主动制动;PWM frequency high -高频率在更高的油门时使运行更平稳,或可设置为根据转速变化。
4Demag 补偿(Demag compensation ):. Demag 补偿是防止电机由于换向引起停转的一个功能,典型的现象是在快速增加油门时电机停转或不顺畅,尤其在低转速运行时。


CYRUS PLUS MOTHERBOARD TECHNICAL REFERENCE MANUAL VERSION 1.1.1 AMIGAONE X50001CONTENTS1Contents (2)2Introduction (7)2.1Technical Support (7)2.2Abbreviations (7)3Architecture (8)3.1CPU (8)3.1.1P3041 (8)3.1.2P5020 (9)3.1.3P5040 (9)3.2Main Memory (9)3.3Ethernet Phy (9)3.4Xena (9)3.5CPLD (9)3.6Boot SD Card (10)3.7BIOS (10)4CPU (11)4.1SerDes Lanes (11)4.2UARTS (11)4.3GPIOs (12)4.4External Interrupts (12)4.5I2C Controller (12)4.6Serial Terminal (13)5DDR3 DIMMs (14)5.1Size (14)5.2Speed (14)5.3Serial Presence Detect (14)6XMOS Subsystem (15)6.1Block Diagram (16)6.2XENA Connetors (17)6.3XMOS Device Type and Clocking (17)6.4Bootstrapping and Debug (17)6.5CPU COMMS (18)6.6Xorro Slot (19)6.7LEDs (19)6.8Spare Port Line (19)6.9PCU (19)6.10Haze Xorro Header (19)7CPLD (20)7.1CPU COMMS (20)7.1.1CPLD XMOS DEBUG Register (21)7.1.2CPLD XMOS JTAG register (21)7.1.3CPLD PCIe register (21)7.1.4CPLD Build Format (21)8MCU (22)8.1Supervisor Interface (22)8.1.1Power Button (22)8.1.2Shut Power Down (22)8.1.3Temperatures Readings (22)8.1.4Voltages (23)8.1.5CPU Fan Speed (24)8.2Debug Serial Terminal (24)9Boot (26)9.1Micro SD card (26)9.2U-Boot (26)10CONNECTOR, JUMPER AND LEDS (27)10.1Switches (27)10.2Jumpers (27)10.3LEDs (28)10.4PCIe and PCI Slots (29)10.5Xena Connectors (33)10.6Programming Headers (36)10.6.1CPLD (36)10.6.2MCU (36)Figure 1: Cyrus Plus Block Diagram (8)Figure 2: XMOS Subsystem Block Diagram (16)Figure 3: XENA connector positions (17)Figure 4: MCU Debug header (24)Figure 5: Front Panel LED and switches (27)Figure 6: Cyrus Jumpers (27)Figure 7: Cyrus Plus LEDs (28)Figure 8: PCIe and PCI slots (29)Figure 9: Programming Headers (36)Table 1: Ethernet link speed (9)Table 2: CPU SerDes Lane Assignments (11)Table 3: CPU GPIOs (12)Table 4: CPU External interrupts (12)Table 5: I2C CPU List (13)Table 6: SIMM SPD Addresses (14)Table 7: XMOS CPLD pin connections (18)Table 8: XMOS CPLD memory map (18)Table 9: Haze Xorro pinout (19)Table 10: CPLD Local bus memory map (20)Table 11: CPLD register XMOS Debug pin map (21)Table 12: CPLD register XMOS JTAG pin map (21)Table 13: CPLD register PCIe signals map (21)Table 14: MCU serial pinout (24)Table 15: SD boot loader blocks (26)Table 16: U-Boot critical settings (26)Table 17: U-Boot Amiga OS boot setting (26)Table 18: Jumpers (27)Table 19: LEDs (28)Table 20: PCIe x16 Slots Pinout (30)Table 21: PCIe x4 Slots Pinout (31)Table 22: PCIe x1 Slots Pinout (31)Table 23: PCI Slots Pinout (32)Table 24: Xorro Slot Pinout - A row (33)Table 25: Xorro Slot Pinout - B row (34)Table 26: Xorro Slot Signal Descriptions (35)Table 27: XTAG Connector Pinout (35)Table 28: CPLD JTAG Header (36)Table 29: MCU Programming Header (36)The Cyrus Plus motherboard combines a high performance Freescale QorIQ CPU with powerful and flexible I/O features to deliver the ultimate desktop platform for AmigaOS users.This manual contains hardware and software reference information to assist with installation, configuration and low level programming of Cyrus Plus.2.1TECHNICAL SUPPORTFor technical support, please contact your reseller.2.2ABBREVIATIONSCyrus Plus’s architecture is shown in Figure 1 below:Figure 1: Cyrus Plus Block Diagram3.1CPUThe CPU on Cyrus Plus is a Freescale QorIQ Power Architecture P series processor. There are 3 options of CPU, these are the P3041, P5020 and P5040.This CPU combines four 1.5 GHz 32-bit e500mc core with a 128KB L2 cache, a single DDR3 memory controller (1333MT/s) and 18 SerDes channels.The Power Architecture e500mc cores adhere to most of the Power ISA v2.06 for more information on thee500mc check the Freescale website.This CPU combines two 2 GHz 64-bit e5500 core with a 512KB L2 cache, dual DDR3 memory controller (1333MT/s) and 18 SerDes channels.The Power Architecture e5500 cores adhere to most of the Power ISA v2.06 for more information on thee5500 check the Freescale website.This CPU combines four 2.2 GHz 64-bit e5500 core with a 512KB L2 cache, dual DDR3 memory controller (1600MT/s) and 20 SerDes channels.The Power Architecture e5500 cores adhere to most of the Power ISA v2.06 for more information on thee5500 check the Freescale website.3.2MAIN MEMORYThe P5020 and P5040 variants have two memory controllers, the P3041 variant has one memory controller. Each CPU memory controller is connected to a standard DDR3 DIMM slot.For further details, see section 5.3.3ETHERNET PHYThe two Micrel KSZ9021RN Gigabit Ethernet PHYs use the RGMII protocol.The PHYs adaptors use two LEDs to indicate the link speed connection as shown in Table 1. The on LED blinks when there is activity on the port.Table 1: Ethernet link speed3.4XENAAn XMOS XS1-L16A-128 “Software Defined Silicon” (SDS) device is provided to support simple, high performance I/O.3.5CPLDThe CPLD provides glue logic and control registers. It also provides a fast mailbox and data interface between the CPU and the XENA device.For further details on the CPLD, see section 7.1 and for the XENA see section 6.5.3.6BOOT SD CARDThe Cyrus Plus motherboard is booted from a micro SD card. This needs to be fitted in P29 for the Cyrus Plus motherboard to boot with a valid BIOS in the first 1258 blocks. For more information see section 9.3.7BIOSA micro SD card provided will hold BIOS code.The BIOS code is maintained by Hyperion.4This section provides programmer visible details of CPU hardware implementation.4.1SERDES LANESThe SerDes lanes are connected as shown in Table 2 below:Table 2: CPU SerDes Lane AssignmentsNotes:Lane 18-19 are only available on the P5040.Unused ports are left un-connected.4.2UARTSThe CPU provides two UARTs, one for external RS232 communication and one for MCU supervisor interface.The UART 0 signals are available on a DB9 connector, P16. This is a 5 wire RS232 interface with RTS and CTS, U-Boot does not used hardware flow control.UART 1 is connected to the MCU to get temperature and voltage readings. For further details on the supervisor interface see section 8.1.4.3GPIOSThe CPU provides 32 general purpose I/Os (GPIOs) and 14 are used. For details of how these are wired, see Table 3 below.Table 3: CPU GPIOsNotes:A ‘#’ suffix denotes an active-low signal.4.4EXTERNAL INTERRUPTSTable 4: CPU External interrupts4.5I2C CONTROLLERThe CPU has 4 I2C controllers the use of each controller is shown below in Table 5.Table 5: I2C CPU List4.6SERIAL TERMINALFor serial communications, on a PC it is recommended to use TeraTerm. The serial port control must be configured as follows:▪ 115200 Baud▪ 8 bit data▪ No Parity▪ 1 Stop bit▪ No Flow ControlCyrus Plus uses standard 1.5V DDR3 DIMMs, 1 socket for P3041 and 2 sockets for P5020/P5040.The board has been qualified with unbuffered non-ECC DIMMs. For the latest information on recommended DIMM module types, please contact your reseller.It is recommended to use DIMMs in matched pairs.5.1SIZEThe total physical maximum size of memory that the memory controllers can address is 64GB, however the practical memory size limit will depend on software.5.2SPEEDThe maximum speed supported by the memory controllers is DDR3-1333 for the P3041 and P5020 variants and DDR3-1600 for the P5040 variant. Faster memory may be fitted but this speed limit will apply.5.3SERIAL PRESENCE DETECTThe Serial Presence Detect (SPD) addresses of the 2 DIMM sockets is are as follows:Table 6: SIMM SPD AddressesCyrus Plus includes direct support for XMOS “SDS” (Software Defined Silicon) technology. A dedicated XMOS device, designated “Xena” here, is provided on-board.Xena is connected to both the main CPU and a custom expansion slot (“Xorro”), which is mechanically aligned with a conventional PCI Express x1 slot.Xorro expansion cards may be enhanced by adding connectivity to the PCI Express bus. Alternatively, if the Xorro slot is not required, the PCI Express slot connector can be used for conventional PCI Express x1 add-in cards.This section provides essential details of Cyrus Plus’s XMOS subsystem, and should be read in conjunction with relevant XMOS documentation.6.1BLOCK DIAGRAMFigure 2 shows how Xena is connected to the main processor, the CPLD, the XTAG debug header and the Xorro slot.Figure 2: XMOS Subsystem Block Diagram6.2 XENA CONNECTORSThe XENA connectors are displayed below in Figure 3.Figure 3: XENA connector positions6.3 XMOS DEVICE TYPE AND CLOCKINGXena is a 500MHz, dual-core XS1-L16A (formerly XS1-L2), in a 124-pin QFN package. It is clocked from a 25MHz oscillator, and its PLL is configured for x20 operation i.e. a core clock speed of 500MHz.6.4BOOTSTRAPPING AND DEBUGBootstrapping and debug of Xena is accomplished via its reset, JTAG and debug signals. These are connected to the CPLD, and may be controlled and sampled via the CPU local bus registers that are implemented within it. For details of these, see section 7.Normally, software running on the main CPU will only see the Xena chip on this interface. If a Xorro card isfitted in the slot, and this asserts the slot PRESENT# signal, the CPLD will route the JTAG chain through the Xorro card, so that any devices on it will appear before Xena (Xorro’s TDO connects to Xena’s TDI).Xena’s control and debug signals are also connected to a header to allow the use of an XMOS XTAG debugger.If one is connected, the CPLD will float most of its pins, allowing the XTAG to take over. It will, however, still provide automatic routing of the TDI/TDO signal chain through a Xorro card, if required, so that the XTAG cancontrol both Xena and Xorro together.Haze Xorro connectorXTAG headerXorroslotXMOS LEDsJP5SPI XMOS EnableThe addition for Cyrus Plus is for an SPI option to boot for the Xena. The SPI device can be programmed via the CPU when PROG_XSPI (GPIO28) is driven low. This allows for the Xena to be booted at startup without any need for JTAG programming.6.5CPU COMMSAs shown in Figure 2, a number of ports from Xcore 1 are connected to the CPU via the CPLD via a mailbox interface with a shared dual port RAM. An interrupt is generated when the CPU has written data to the RAM for the Xena to read data.Table 7: XMOS CPLD pin connectionsThe intention is that a thread on Xcore 1 should be programmed for the mailbox protocol using the pin assignment in Table 7. The protocol uses indirect addressing in that the address of the area of the memory to be accessed is first written to the index register (using DI low to select the index register), then reading or writing the data with DI driven high. Note that the index register will auto increment when reading or writing to the RAM. When finished writing data to RAM the code should write to the MBX2C register to generate an interrupt to the CPU. Example code for this will be provided.The CPU communications to the Xena is similar to the CPLD to Xena, but the index or data registers are directly memory mapped. The index address is 0x0 and the data address is 0x8000. For example to read the SIG1 value, from the CPU you write 0x0 at address 0x0 and then read the data in 0x8000.The memory map for Xena to the CPLD is shown below in Table 8.Table 8: XMOS CPLD memory map6.6XORRO SLOTThe Xorro slot connector is physically a PCI Express x8 (98 pin) card edge connector. Xorro cards are not compatible with PCI Express x8 cards.The pinout of the Xorro slot connector is provided in section 10.5, together with signal descriptions.6.7LEDSA pair of simple LEDs is provided for diagnostic purposes. These are connected to Xcore 0 (port P1K) and Xcore1 (port P1E), and are illuminated when driven low.6.8SPARE PORT LINEThe spare port line (Xcore 0 port P1L) is connected to the CPLD. Its use is reserved and it should be tri-stated.6.9PCUXena’s PCU (Power Control Uni t) is not used.6.10HAZE XORRO HEADERThere is an additional header to the Xena to allow for direct connection between the Xena and CPU via the serial port. The pin out of the Haze Xorro connector, H7 is shown in Table 9.Table 9: Haze Xorro pinoutWarning: When using the Haze Xorro header make sure that you have configured the Xena IOs so that it is not driving outputs onto the CPU output signals.7The CPLD is connect to the CPU via the local bus and allows for the high speed interface between the CPU and the XMOS. There are other read only registers which include the CPU fan speed.7.1CPU COMMSThe interface for the CPU to the CPLD is similar to the XMOS mail box, the address of the register to be accessed should first be written to the index register at address (0x0). The data can then be read and written using the data address (0x8000). For example to check the speed of the CPU fan TACHO you would write 0x10 into address 0x0, then read data from address 0x8000.For more details on the Xena link protocol referrer to section 6.5.The memory map for the CPU to the CPLD is shown below in Table 10.Table 10: CPLD Local bus memory mapNotes:1.The FAN_TACHO signal should be read multiple times to get rid of metastability.2.VID values are relevant to P5040 boards only.Table 11: CPLD register XMOS Debug pin mapTable 12: CPLD register XMOS JTAG pin mapTable 13: CPLD register PCIe signals mapThe format of the CPLD build time and date are stored in a 32-bit value using BCD, on for build date and one for build time. The date is store as YYYYMMDD and the time is store as 00HHMMSS.8The MCU is a supervisor for the Cyrus Plus motherboard and provides voltage and temperature monitoring for the CPU.8.1SUPERVISOR INTERFACEThe supervisor interface is like an ACPI and is connected over serial port 1 to the CPU. The connection should be setup using:▪ 38400 Baud▪ 8 bit data▪ No Parity▪ 1 Stop bit▪ No Flow ControlEach packet has a start and end character. The CPU can tell the MCU to turn off the power, get temperatures and get voltages.Commands can be pipelined as the serial interface is interrupt driven, and responses contain the command it is responding to.All MCU to CPU messages start with '$' and end with a new line character, ASCII 0x0A.All CPU to MCU messages start with '#' and end with a new line character, ASCII 0x0A.When the power button is pressed, a 1ms low pulse is generated on IRQ4# to the CPU. The CPU can use the interrupt to cleanly shut down the OS and the power supplies via the ACPI serial interface.Holding the power button for greater than 5s will force the power off.To shut down the power of the Cyrus Plus motherboard from the CPU, the 's' command is used.Example:To read the temperature readings, the 't' command is used.Returns the temperatures in the following format:$t<sign>HH...<sign>HHWhere HH is the ASCII hex value of the temperature, and <sign> is either '+' or '-'.There are three temperature available to read on the Cyrus Plus motherboard. The temperatures given are returned in this order:1.PCB temperature2.CPU temperature3.PCIe switch temperatureExample:Represents+32°C for the PCB temperature+56°C for the CPU temperature+75°C for the PCIe switch temperatureTo read all the measured voltages, the 'v' command is used.Returns the voltages in the following format:$vXXYY...XXYYWhere XX represents the whole number of volts as ASCII hex, YY represents the number of 10mV units as ASCII hex.The voltages are sent in the order:1.CPLD, 3.3V2.Xena/Xorro3.3V3.Xena/Xorro 1.0V4.PCIe switch, 1.0V5.Xena 1.0V6. 3.3V7. 2.5V8.Ethernet 1.2V9.Platform, 1.0V10.Core A, 1.0V for P3041 1.1V for P5020, 1.1V-1.2V for P504011.Core B, 1.0V for P3041 1.1V for P5020, 1.1V-1.2V for P504012.DDR3 IO, 1.5V13.Serdes, 1.8VExample for the above default values:To read the CPU fan speed, the 'f ' command is used. This returns the fan speed (in RPM) and the fan duty cycle (0 -> 255, where 0 is off and 255 is full on). Returns the fan status in the following format: $fXXYYYYWhere XX is the ASCII hex value of the PWM (0x00 to 0xFE) YYYY is the ASCII hex value of the RPM, MSB first. Example:RepresentsFan PWM, 0xC0, 192 decimal Fan RPM, 0x10E6, 4326 decimal8.2 DEBUG SERIAL TERMINALThe MCU also provides serial debug interface for status reporting of the read voltages and temperature rails. This uses a 6 pin FTDI USB-TTL cable pinout (P18), see Figure 4 for location.Figure 4: MCU Debug headerThe pinout of the Debug serial terminal is give below in Table 14.Table 14: MCU serial pinoutNotes:Pins 2-4 and 6 are unconnected.MCU Debug headerTo set up a serial communications on a PC, it is recommended to use TeraTerm. The serial port must be configured as follows:▪ 38400 Baud▪ 8 bit data▪ No Parity▪ 1 Stop bit▪ No Flow ControlThis section contains specific Cyrus Plus boot information on the micro SD card and U-Boot.9.1MICRO SD CARDThe micro SD card contains all the U-Boot data. This is required to boot the system to U-Boot. The first 629kB or 1258 blocks contain the boot loader. The boot loader data should not be edited when accessing the SD card otherwise the system will cease to boot. The structure of the boot loader blocks of the micro SD card is shown in Table 15 below.Table 15: SD boot loader blocks9.2U-BOOTCyrus Plus uses a standard version of U-Boot configured for the Cyrus Plus hardware. For further reference of the U-Boot commands check out U-Boot website.There are specific environment settings which need to be configured for the system work correctly, these are shown in Table 16. These should not be edited as they will affect the functionality of Cyrus Plus Motherboard.Table 16: U-Boot critical settingsThere are specific environment settings for booting Amiga OS and these are listed in Table 17 below. Environment name Environment valueaosautoboot if run aosusbboot; then echo OK; else sata init; if run aossata0boot; then echo OK;echo if run aossata1boot; then echo OK; else run aosnetboot; fi; fi; fibootmenu_0 OS4 Auto Boot=run aosautobootbootmenu_1 USB Boot=run aosusbbootbootmenu_2 Net Boot=run aosnetbootbootmenu_3 SATA 0 Boot=sata init; run aossata1bootbootmenu_4 SATA 1 Boot=sata init; run aossata1bootTable 17: U-Boot Amiga OS boot setting10.1 SWITCHESHeaders are provided for front panel power and reset switches/buttons of the momentary, normally open type.Figure 5: Front Panel LED and switchesP6 (labelled POWER) is for the power button. P7 (RESET) is for the reset button. For P6 pin 1 is grounded and pin 2 is pulled up to 3.3V. For P7 pin 2 is grounded and pin 1 is pulled up to 3.3V.10.2 JUMPERSJumpers are provided to select boot configuration options, there position on the motherboard as shown in Figure 6.Figure 6: Cyrus JumpersTable 18: Jumpers10.3 LEDSCyrus provides 12 on-board LEDs and headers for 3 off board LEDs. Their location on the motherboard is shown in Figure 5 and Figure 7.Figure 7: Cyrus Plus LEDsTable 19: LEDsNotes:The LED header drivers are of the constant current (20mA) type and are suitable for driving LEDs with a forward voltage of between 2 and 12V (they will directly drive any standard LED assuming it is rated for 20mA or more). P12 is pinned out as follows: 1,2 = +/anode, 3 = -/cathode. P10 and P13 are pinned out as follows: 1 = +/anode, 2 = -/cathode. Pin 1 is marked by an arrow in each case.10.4PCIE AND PCI SLOTSThe pinout of the PCIe slots 1 shown in Table 20. The pinout for slot 2 is shown in Table 21.The pinout of slots 3, 4 and 5 is shown in Table 22. The pinout of slots 6 and 7 is shown in Table 23. The position of the connector for the PCIe and PCI slots is shown in Figure 8.Figure 8: PCIe and PCI slotsPCI Slots SLOT7 SLOT6PCIe SlotsSLOT5 SLOT4 SLOT3 SLOT2 SLOT1Table 20: PCIe x16 Slots Pinout Note: Slot 1 lanes 4-15 are always no connect.Table 21: PCIe x4 Slots PinoutTable 22: PCIe x1 Slots PinoutTable 23: PCI Slots Pinout10.5XENA CONNECTORSThe pinout of the Xorro slot is shown in Table 24 and Table 25 below. See Table 26 for signal descriptions. The pinout of the XTAG (XMOS JTAG) header is shown in Table 27.Table 24: Xorro Slot Pinout - A rowPorts LinksTable 25: Xorro Slot Pinout - B rowTable 26: Xorro Slot Signal DescriptionsNotes:3.Signal direction is with respect to the Xorro card. “I” signifies a signal driven from the motherboardto the card.4.Cards that do not provide any JTAG devices should connect TDI to TDO, and leave other JTAGsignals unconnected.Table 27: XTAG Connector PinoutNotes:1.The XTAG# signal is wired to ground on the XTAG debugger and is used to sense its presence byCyrus Plus (it is pulled up to 3.3V).10.6PROGRAMMING HEADERSThe locations for the programing header are located below in Figure 9.Figure 9: Programming HeadersThe pinout for H2 (labelled PLD JTAG) is shown in Table 28 below:Table 28: CPLD JTAG HeaderThe pinout for H3 (labelled MCU PROG) is shown in Table 28 below:Table 29: MCU Programming HeaderMCU headerCPLD JTAG header。
深圳市研莱科技服务有限公司,成立于2007年,工厂占地面积3000多平方米,现有员工
100多人.主要生产、机架式服务器机箱、工控机箱及钣金制品。
我们的宗旨是:专心专注专业服务品质效率
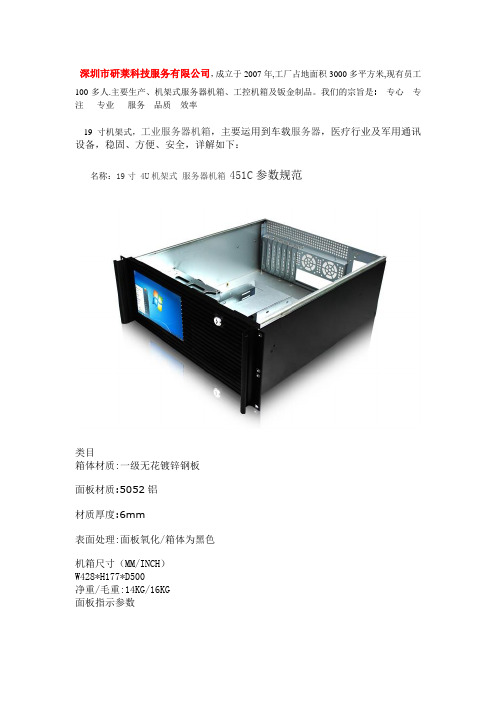
19寸机架式,工业服务器机箱,主要运用到车载服务器,医疗行业及军用通讯设备,稳固、方便、安全,详解如下:
名称:19寸4U机架式服务器机箱451C参数规范
类目
箱体材质:一级无花镀锌钢板
面板材质:5052铝
材质厚度:6mm
表面处理:面板氧化/箱体为黑色
机箱尺寸(MM/INCH)
W428*H177*D500
净重/毛重:14KG/16KG
面板指示参数
开关/重启:1个/1个
电源灯/硬盘灯:
1个兰色/1个红色
2.0USBr接口: 2个
驱动磁机位:
液晶屏8.9
5.25"CD-ROM
1个
3.5" HDD
2个插拔/2个内置
2.5" HDD
支持主板规格
12"*13"
适合电源规格
普通PS-2规格电源/冗余
扩展槽数量
全高卡/半高卡
7个全高
适合导轨规格
选配:26"
标配I/O档板
主板自带
散热风扇规格9025双滚珠/2个标配触摸板
8.9"/1片。
Intel AMT快速应用指南适用于QM170系列芯片组计算机远程维护硬件技术我知道原创Intel AMT是英特尔博锐(vPro)技术的一部分。
如果计算机配置并启用了Intel AMT,我们就可以远程控制并操作该计算机。
包括开机、关机、安装操作系统等等。
芯片组不同,其ME固件也不同,所以相关配置和操作也会有细微的差异。
本文介绍的应用,适用于QM170芯片组。
目录1. 简介 (3)2. 终端机设置 (3)2.1 BIOS设置 (3)2.2 MEBX设置 (3)3. 操作平台安装软件 (5)3.1 下载软件 (5)3.2 安装软件 (5)4. 终端机维护作业 (6)4.1 终端机的要求 (6)4.2 操作平台的要求 (6)4.3 维护作业 (6)1.简介本文引导用户快速了解远程工控机维护,更多、更完整的功能,请参考intel相关文件。
这里约定:被控制、接受维护的,带iAMT功能的计算机,简称为“终端机”;进行维护操作的办公电脑,简称为“操作平台”。
一个操作平台,可以同时管理、维护多台终端机。
2.终端机设置2.1BIOS设置不同的主板,其BIOS设置界面可能不同。
多数BIOS如下:a)开机,按“Delete”或“F2”键进入BIOS Setup Menu。
b)确认“Advanced\AMT Configuration\Intel AMT”为“Enable”;c)确认“Chipset\PCH LAN Configuration\PCH LAN Controller”为“Enable”;d)确认“Chipset\PCH LAN Configuration\Wake on LAN”为“Enable”。
e)最后按“F10”或“F4”并回车,保存并退出。
2.2MEBX设置2.2.1 登录MEBX并设置新密码a)重新开机,按“Ctrl”+“P”键(与进BIOS的时机相同),进入MEBX配置主界面。
b)进入MEBX MAIN MENU后,先要登录,默认登录密码是“admin”。
2013年联想远程管理平台话术参考
一、联想各版本相应的功能参数描述,具体如下:
二、常用控标参数描述
1、提供同一品牌终端安全管理软件并可出厂预安装,具体实现的平台及功能如下:(对应上面的列表将相应功能描述放上即可)
2、平台全部功能需支持多种操作系统的版本,如windows7、windows8、XPE 等;
3、产品服务端及客户端需全面支持64位操作系统;
4、所有功能策略在windows安全模式下依然生效;
5、提供微软WHQL认证,以确保产品的稳定性和兼容性,并提供相关认证截
图文件
6、提供投标产品截图,证明产品的同一品牌和一体化产品,并可以做现场的软
件产品真实展示。