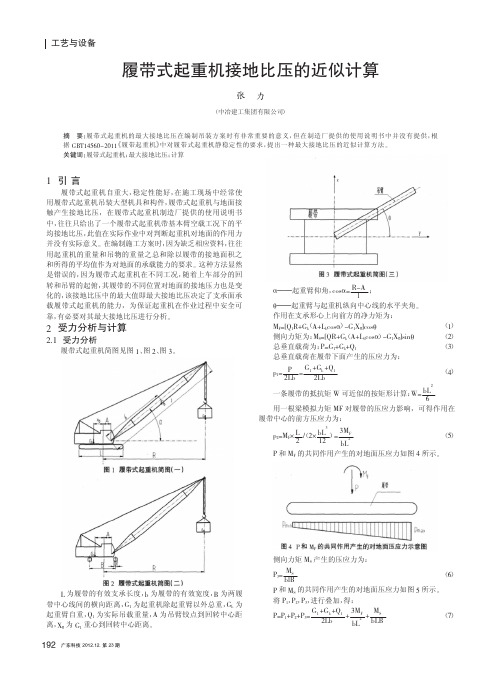
履带式起重机接地比压的近似计算
- 格式:pdf
- 大小:676.25 KB
- 文档页数:3
XGC150-I履带起重机技术规格书履带起重机型号:XGC150-I最大额定起重量:150t最大额定起重力矩:790.8t.m一、产品的部件和系统描述1.臂架组合方式主臂工况HB,长度16m~76m,主臂组成:底节臂1×8m、顶节臂1×8m、中间节2×3m、中间节1×6m、中间节4×12m;固定副臂工况HF,长度13m~31m,固定副臂组成:底节臂1×6m、顶节臂1×7m、中间节3×6m。
主臂配置臂端单滑轮。
2.臂架变幅构件采用高强拉板结构,安全系数高;可随臂架运输,安装方便、省力、高效。
3.桅杆桅杆为箱形双肢结构,具有良好的整体稳定性。
通过桅杆顶升油缸实现桅杆扳起顶升和降落。
桅杆上安装有辅助拆装油缸(选装件),用于主臂底节臂、中央平衡重及履带架自拆装,也可用于其它辅助吊装。
4.转台转台是联系上下车的关键承载结构件,采用高强钢板焊接而成的双侧“工”字梁箱框式复合结构,通过回转支承可与下车进行联接,整体强度高、稳定性好。
驾驶室、变幅机构、发动机系统、主泵、液压阀、桅杆、主臂底节、上车平衡重等可分别与转台在不同部位进行联接。
5.机构组成本机的机构配置及用途如下表:6.起升机构起升机构由马达驱动行星齿轮减速机,通过卷筒及滑轮组实现主钩或副钩起升下降,通过双泵供油功能提高起升机构升降速度。
起升机构内置行星减速机,采用常闭制动器,实现“弹簧制动/液压释放”功能,安全可靠。
起升机构使用高破断拉力的钢丝绳,钢丝绳直径φ26mm。
7.变幅机构变幅机构由马达驱动行星齿轮减速机,通过卷筒及变幅滑轮组来实现主臂变幅。
变幅机构内置行星减速机,采用常闭制动器,实现“弹簧制动/液压释放”功能,安全可靠。
变幅卷筒设有棘轮锁止装置,由液压油缸驱动棘爪,实现多重锁定保护。
变幅机构使用高破断拉力的钢丝绳,钢丝绳直径φ22mm。
8.回转机构回转机构与回转支承采用内啮合方式驱动,布置在转台内侧前面前部,由马达驱动行星齿轮减速机驱动回转支承,实现360°回转。

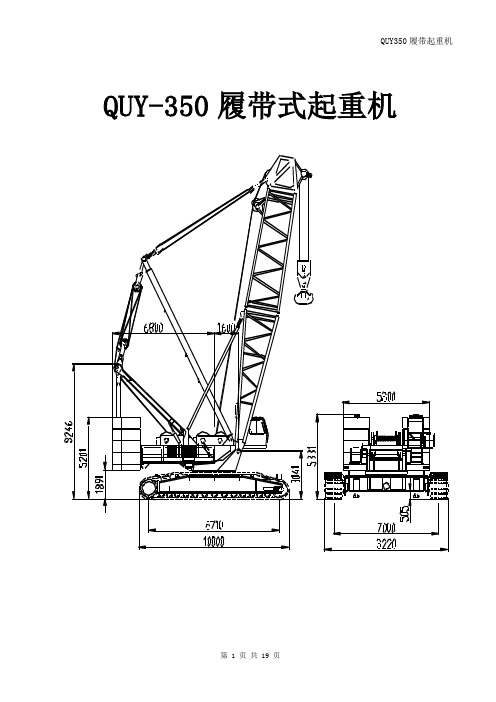
附2 QUY50履带式起重机技术参数
(一)、QUY50履带起重机基本参数表
1.下表中所示的额定起重量(单位为吨),是在坚硬、平坦的地面上吊载工作的值,该值在倾翻载荷78%以内。
2.实际可以吊升载荷,是由上表起重量扣除(主钩+副钩)等一切吊具重量后的值。
3.平衡重为16吨,4吨钩重0.087吨。
4.工作时必须扩张履带。
5.工作幅度是吊重以后的实际工作幅度。
第 1 页共5 页
二)、QUY50履带起重机主臂起重性能表
第 2 页共5 页
三、QUY50起重机副臂起重作业性能表
第 3 页共5 页
三、QUY50起重机副臂起重作业性能表(续)
第 4 页共5 页
三、QUY50起重机副臂起重作业性能表(续)
第 5 页共5 页。

主要技术性能参数表
重型主臂起重性能表
基本型主臂起重性能表
轻型主臂起重性能表
续表主臂长度54m
主臂长度60米时塔臂起重性能
重型主臂作业范围
主臂86 的塔式副臂作业范围
.主臂76 的塔式副臂作业范围
主臂66 的塔式副臂作业范围
整机(全部件)重量为342吨,各部件分解运输重量及尺寸如下表:本体、吊钩及配重分解运输重量及尺寸
左右履带架分解运输重量及尺寸
桅杆、转台支腿油缸、起升机构分解运输重量及尺寸
主臂架分解运输重量及尺寸
塔式副臂架分解运输重量及尺寸。


西安北站地下结构吊车对地压力计算江苏沪宁钢机股份有限公司2008-12-12一、吊车参数西安北站地下通道安装采用200吨履带吊。
吊车参数如下所示:吊车外形尺寸图吊车主臂性能列表1吊车主臂性能列表2 二、吊车对地压力计算方法简介吊车工作状态下计算简图如下所示:吊车工作状态下计算简图吊车在起吊构件时,起吊构件的重量对吊车将产生向下的压力F和弯矩M,如上图所示。
其中F等于起吊重物重量G和吊车工作状态下自重g相加,M=G·r。
α吊车基座俯视图根据地基梁的受力原理,吊车两条履带假定为承受地面压力的组合截面,绕X轴和绕Y轴惯性矩可通过下列公式计算:I x=2L·b·(B/2)2。
I y =1/6bL 3。
吊车工作状态下上图中p1、p2、p3和p4点对地压力1σ、2σ、3σ和4σ可通过以下计算方法得到。
(1)当起吊方向与X 轴平行时,α=0º2σ=4σ=Lbg G 2++y I ML 2 1σ=3σ=Lbg G 2+-y I ML 2 (2)当起吊方向与Y 轴平行时,α=90º1σ=2σ=Lbg G 2++x I MB 2 4σ=3σ=Lb g G 2+-x I MB 2 (3)当起吊方向与X 轴夹角为任意角度时1σ=Lbg G 2+-y I L M 2cos α+x I B M 2sin α 2σ=Lbg G 2++y I L M 2cos α+x I B M 2sin α 3σ=Lbg G 2+-y I L M 2cos α-x I B M 2sin α 4σ=Lb g G 2++y I L M 2cos α-x I B M 2sin α 当采用上述计算公式计算得到的对地压力出现负值时,说明吊车起吊能力不足,需要重新选择吊车。
三、西安北站吊装工况分析2.1 吊车工作状态分析2.1.1 轴线T 至~轴线H 吊车工作位置分析吊车吊装位置示意图吊装轴线T~轴线H之间构件时吊车站位如上图所示。
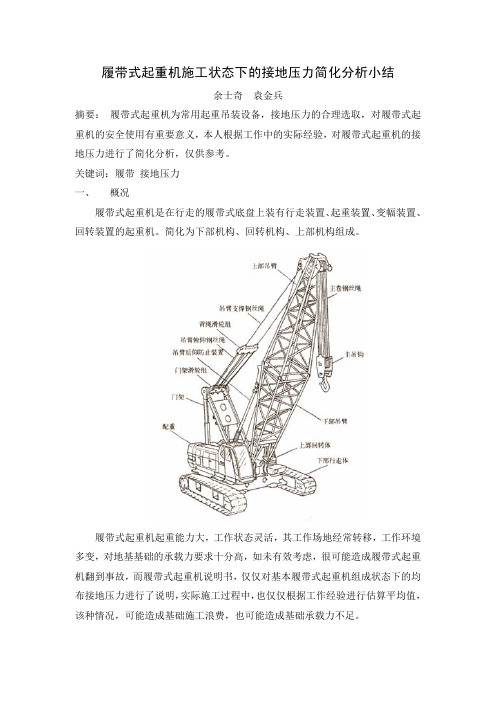
履带式起重机施工状态下的接地压力简化分析小结余士奇 袁金兵摘要: 履带式起重机为常用起重吊装设备,接地压力的合理选取,对履带式起重机的安全使用有重要意义,本人根据工作中的实际经验,对履带式起重机的接地压力进行了简化分析,仅供参考。
关键词:履带 接地压力一、 概况履带式起重机是在行走的履带式底盘上装有行走装置、起重装置、变幅装置、回转装置的起重机。
简化为下部机构、回转机构、上部机构组成。
履带式起重机起重能力大,工作状态灵活,其工作场地经常转移,工作环境多变,对地基基础的承载力要求十分高,如未有效考虑,很可能造成履带式起重机翻到事故,而履带式起重机说明书,仅仅对基本履带式起重机组成状态下的均布接地压力进行了说明,实际施工过程中,也仅仅根据工作经验进行估算平均值,该种情况,可能造成基础施工浪费,也可能造成基础承载力不足。
故此,笔者根据自身的工作经验,对履带式起重机接地压力进行简化分析,为其他同仁提供一种解决思路。
本文以SCC2500型履带式起重机为例,进行分析,其相关参数整理如下:履带式起重机相关参数一览表履带宽度B 1.12m 履带长度L 7.88m平横配重重量 106t吊机重量(45.7m主臂+12.2m副臂)200t作业半径 12m 吊物、吊钩、杆重等 90t 备注:以某工程实际工况为例。
二、 手算简化分析因人工计算的局限性,仅对以下两种工况进行分析,其一为正面0°或180°进行吊装作业,其二为侧面90°或270°进行吊装作业。
1、0°或180°吊装工况履带式起重机在该工况吊装状态下,接地压力主要由以下几种荷载产生:履带式起重机自重及吊物自重;平衡配重产生的弯矩;起重臂产生的弯矩、吊物产生的弯矩。
独立柱吊装模型及计算简化模型为能进行简化计算,假定履带式起重机为悬臂梁状态,P由整体的自重提供,M由各构配件组合弯矩组成。
详细受力分析如下(未考虑分项系数): 履带接地面积:S=2*1.12*7.88=17.65m2结构总自重:P=2900KN履带的抗弯截面模量:W=bh2/6=1.12*7.88*7.88/6=11.6m3组合弯矩(为简化计算,杆重产生的弯矩忽略):M=900*10-1060*6.22=2400KN*m重力产生的接地压力:2900/17.65=164KPa弯矩产生的接地压力: M/(2*W)=103KPa。
工程钻机—履带行走部分设计摘要工程机械是国民经济建设及国防工程施工中使用的重要技术装备,在国民经济建设中,尤其是城市建设、民用建筑、水利建设、道路构筑、机场修建、矿山开采、码头建造、农田改良中,工程机械起着越来越重要的作用。
我国的工程机械行业目前进入了一个高速发展阶段,推、挖、装、起重、铲土运输、筑路、农用机械等各种品种齐全并形成了系列化,各种工程机械虽然品种很多但基本上可划分为动力装置、行走装置和工作装置。
履带行走装置的挖掘机履带行驶系统包括车架。
行走装置和悬架三部分。
车架是整体骨架,用来安装所有的总成和部件。
行走装置用来支持机体,把动力装置传到驱动轮上的驱动转矩和旋转运动变为车辆工作与行驶所需的驱动力和速度。
悬架是车架和行走装置之间互相传力的连接装置。
本文在详述履带行走装置整体设计的基础上,又对驱动轮、拖链轮、导向轮、支重轮结构进行了设计,对一些关键部分进行了设计校核计算。
对各个轮的加工工艺有粗略的描述。
本文还详述了减速系统的设计包括轴、齿轮的选择及校核。
关键词:整体设计;驱动轮;支重轮;减速系统AbstractConstruction Machinery is a national economic construction and national defense construction in the importance of the use of technical equipment, construction in the national economy, especially in urban construction, civil construction, water conservancy, road building, airport construction, mining, pier construction, agricultural improvement, mechanical engineering is playing an increasingly important role. China's construction machinery industry has now entered a phase of rapid development, pushing, digging, loading, lifting, shoveling transport, roads, agricultural machinery and other species and formed a complete series, all kinds of construction machinery but although many species can basically be classified into power plant, operating equipment and working equipment.Crawler excavator crawler traveling device system includes the frame. Walking devices and suspension of three parts. Overall skeleton frame is used to install all the assemblies and components. Walking device used to support the body, the power plant came on the drive wheel torque and rotary movement into a vehicle required for work and driving the driving force and speed. Suspension is a walking frame and transmission device between the connected devices.In this paper, detailed walking track devices based on the overall design, butalso on the driving wheel, drag chain, guide wheel, supporting wheels structure design, for some of the key parts of the design verification calculation. For each round of processing technology has a rough description. This article also details the system design, including speed shaft, gear selection and verification.Keywords: the overall design, wheel, supporting wheels, slowing the Department目录摘要 (I)Abstract (II)第一章前言 (1)1.1国内履带式液压驱动底盘的现状 (1)第二章履带式行走装置的总体方案设计 (5)2.1履带式行走装置的特点 (5)2.2国内履带式液压驱动底盘的发展趋势 (5)2.3 产品的主要技术要求 (6)2.4总体设计依据 (7)2.5履带式行走装置的功用与组成 (7)2.5.1驱动轮 (8)2.5.2支重轮 (8)2.5.3导向轮 (9)2.5.4缓冲装置 (9)2.5.5托链轮 (9)2.5.6履带 (10)2.6考虑到的若干方案的比较 (11)2.7履带式行走装置的接地比压 (12)2.8运行阻力计算 (12)2.8.1履带支承长度L、轨距B和履带板宽度b (12)2.8.2履带的张紧度计算 (13)2.8.3节距 (13)2.8.4运行阻力计算 (13)2.9拟定和分析传动方案 (15)第三章传动方案的总体设计及各零部件的设计 (16)3.1选择液压马达 (16)3.2液压马达选取 (16)3.3液压泵的选取 (17)第四章驱动轮的设计 (18)4.1驱动轮的整体设计 (18)4.2 驱动轮的形状 (18)4.2.1 驱动轮的结构 (18)4.2.2 驱动轮齿数的设计计算 (18)4.3 驱动轮各部分结构尺寸 (19)4.4 轴的设计 (20)4.4.1 轴直径的确定 (20)4.4.2 心轴的强度校核 (21)4.5 轴承的计算 (22)4.6 驱动轮的加工工艺 (23)4.6.1 工艺方案 (23)4.6.2 工艺基准选择 (24)4.6.3 加工顺序的安排 (24)4.7 标准件的选择 (24)第五章支重轮和托链轮的设计及计算 (26)5.1 支重轮的直径 (26)F (26)5.1.1 支重轮的摩擦阻力"w5.1.2 支重轮的摩擦阻力 (26)5.1.3 支重轮轴强度的校核: (26)5.2 支重轮的加工工艺 (28)5.2.1选材及结构 (28)5.2.2 热处理 (29)5.2.3 表面喷丸 (30)5.2.4 压力机压铜套 (30)5.3托链轮轮及轴的强度校核 (31)5.3.1根据轴的结构图做出轴的计算简图 (31)5.3.2根据轴的计算简图做出轴的剪力图与弯矩图 (32)5.3.3确定材料的许用切应力和弯曲应力 (33)5.3.4 校核轴的剪切应力及弯曲强度 (33)第六章导向轮的整体设计 (35)6.1 导向轮的结构设计 (36)6.1.1导向轮的结构形状 (36)6.1.2轮轴的设计 (36)6.1.3轴径d的确定 (37)6.1.4 轴的强度校核 (38)6.3 导向轮外部尺寸 (39)6.3.1轮的尺寸 (39)6.4轴承的计算 (40)6.4.1验算轴承的平均压力P(单位./MPa) (40)6.4.2 验算轴承的pv (单位Mpa.m/s)值 (41)m s) (41)6.4.3 验算滑动速度v(单位/6.5 标准件的选择 (41)第七章履带的选择 (43)第八章履带张紧装置 (44)8.1结构形式和设计要求 (44)8.1.1结构形式 (44)8.1.2对张紧装置的设计要求是: (45)8.2 设计方法 (47)8.2.1履带的张紧度 (47)8.2.2缓冲弹簧的预紧力1H P 和最大弹性行程时的张力2H P 。

履带吊及汽车吊使用地基承载力计算一、履带吊地基承载力验算履带吊基础,表层清除表土,用宕渣回填,回填深度 1.5m,压路机碾压,压实孔隙率不大于25%。
履带吊吊梁,最不利工况履带吊吊装箱梁施工,单榀箱梁自重为224t,履带吊自重按330t计(含配重),吊装工况每条履带下方垫12m×2.5m×0.3m路基板,宕渣换填厚度取0.8m,容重取18.6KN/m3,软弱下卧层为粉土①,地基承载力为100kpa,容重为19.4KN/m3。
履带吊地基处理,图-1 350t履带吊履带尺寸参数根据建筑地基基础设计规范 5.2.4,az f 为软弱下卧层顶面处经深度修正后的地基承载力特征值(kPa )。
()()030.5az a b d m f f b d ηγηγ=+-+-1000.319.46318.6 1.0145.36az f kPa =+⨯⨯-⨯⨯=()+1.5验算软弱下卧层地基承载力应满足下式z cz az p p f +≤式中:z p ---相应于作用的标准组合时,垫层底面处的附加压力值(kPa)cz p ---垫层底面处土的自重压力值(kPa )az f ---垫层底面经深度修正后的地基承载力特征值(kPa )吊装工况:考虑最不利工况,一条履带按照0.7倍荷载计算; 基础底面处的平均压力:基础底面处土的自重应力:18.60.814.88c p kPa =⨯=软弱下卧层顶面处的附加压力:()(2tan )(2tan )k c z bl p p p b z l z θθ-=++ 式中:b 、l---矩形基础或条形基础地面的宽度及长度(m )k p ---相应于作用的标准组合时,基础底面处的平均压力值(kPa ) c p ---基础底面处土的自重压力值(kPa )z ---基础底面至软弱下卧层顶面的距离(m )---垫层(材料)的压力扩散角(°)取0°。
软弱下卧层顶面以上土的自重压力值:,满足要求二、300t汽车吊地基承载力验算300t汽车吊吊梁,最不利工况履带吊吊装T型梁施工,单榀T 型梁自重为82t,吊具吊钩2.5t,汽车吊自重按72t,配重114t,支腿间距8.5×8.3,支腿下垫3.5×3.5×0.05m钢板板,宕渣换填厚度取2m,压实孔隙率不大于25%,容重取18.6KN/m3,软弱下卧层为粉土①,地基承载力为100kpa,容重为19.4KN/m3。
履带接地比压计算公式
履带接地比压的计算公式取决于比压的方向,主要有两种计算方式:
1. 横向接地比压:横向接地比压是指履带垂直于挖掘机方向时产生的比压,计算公式为横向接地比压 = 挖掘机总重 / (履带长度× 履带宽度)。
其中,
挖掘机总重是指挖掘机及其装备的总重量,履带长度和宽度则是指履带的实际长度和宽度。
2. 纵向接地比压:纵向接地比压则是指履带平行于挖掘机方向时产生的比压,其计算公式为接地比压 = 车辆重量 / 有效接地面积。
其中,车辆重量是指
车辆整重,有效接地面积则是指履带贴合地面的实际面积,也称为接地面积。
在实际使用过程中,建议根据不同的使用需求和使用环境,选择适合的比压计算方式。
西安北站地下结构吊车对地压力计算江苏沪宁钢机股份有限公司2008-12-12一、吊车参数西安北站地下通道安装采用200吨履带吊。
吊车参数如下所示:吊车外形尺寸图吊车主臂性能列表1吊车主臂性能列表2 二、吊车对地压力计算方法简介吊车工作状态下计算简图如下所示:吊车工作状态下计算简图吊车在起吊构件时,起吊构件的重量对吊车将产生向下的压力F和弯矩M,如上图所示。
其中F等于起吊重物重量G和吊车工作状态下自重g相加,M=G·r。
α吊车基座俯视图根据地基梁的受力原理,吊车两条履带假定为承受地面压力的组合截面,绕X轴和绕Y轴惯性矩可通过下列公式计算:I x=2L·b·(B/2)2。
I y =1/6bL 3。
吊车工作状态下上图中p1、p2、p3和p4点对地压力1σ、2σ、3σ和4σ可通过以下计算方法得到。
(1)当起吊方向与X 轴平行时,α=0º2σ=4σ=Lbg G 2++y I ML 2 1σ=3σ=Lbg G 2+-y I ML 2 (2)当起吊方向与Y 轴平行时,α=90º1σ=2σ=Lbg G 2++x I MB 2 4σ=3σ=Lb g G 2+-x I MB 2 (3)当起吊方向与X 轴夹角为任意角度时1σ=Lbg G 2+-y I L M 2cos α+x I B M 2sin α 2σ=Lbg G 2++y I L M 2cos α+x I B M 2sin α 3σ=Lbg G 2+-y I L M 2cos α-x I B M 2sin α 4σ=Lb g G 2++y I L M 2cos α-x I B M 2sin α 当采用上述计算公式计算得到的对地压力出现负值时,说明吊车起吊能力不足,需要重新选择吊车。
三、西安北站吊装工况分析2.1 吊车工作状态分析2.1.1 轴线T 至~轴线H 吊车工作位置分析吊车吊装位置示意图吊装轴线T~轴线H之间构件时吊车站位如上图所示。

温馨小提示:本文主要介绍的是关于履带起重机计算的文章,文章是由本店铺通过查阅资料,经过精心整理撰写而成。
文章的内容不一定符合大家的期望需求,还请各位根据自己的需求进行下载。
本文档下载后可以根据自己的实际情况进行任意改写,从而已达到各位的需求。
愿本篇履带起重机计算能真实确切的帮助各位。
本店铺将会继续努力、改进、创新,给大家提供更加优质符合大家需求的文档。
感谢支持!(Thank you for downloading and checkingit out!)履带起重机计算一、履带起重机概述履带起重机定义及分类履带起重机是一种自行式、全回转的起重机械,主要用于各种场合的货物装卸、安装、维修等作业。
它由行走装置、回转装置、起重装置、操纵装置和电气系统等部分组成。
根据不同的分类标准,履带起重机可以分为以下几类:(1)按照额定起重量分类,可以分为轻型、中型、重型和超重型;(2)按照行走方式分类,可以分为轮式、履带式和步进式;(3)按照回转方式分类,可以分为全回转和非全回转;(4)按照使用场合分类,可以分为工程用、矿用、船用等。
履带起重机的结构及工作原理履带起重机的结构主要包括以下几个部分:(1)行走装置:履带起重机的行走装置采用履带式,可以实现在各种地形上的稳定行走。
履带板之间的摩擦力可以提供足够的抓地力,确保起重机在作业过程中的稳定性。
(2)回转装置:回转装置通常采用回转支承或者回转机构,可以使起重机实现360°全回转。
回转支承是一种具有较高承载能力的轴承,可以承受起重机在回转过程中的各种载荷。
(3)起重装置:起重装置是履带起重机的核心部分,主要包括起重机臂架、滑轮组、钢丝绳和重物等。
起重机臂架通常采用多节臂结构,以实现不同高度的作业需求。
滑轮组和钢丝绳用于传递起重力,将重物提升到指定位置。
(4)操纵装置:操纵装置包括驾驶室和操纵杆,用于控制履带起重机的行走、回转、起重等功能。
驾驶室通常配备有显示屏、控制系统等,方便操作人员实时了解起重机的运行状态。