Virtual Prototyping of the Four-Legged Walking Machine BISAM
- 格式:pdf
- 大小:466.08 KB
- 文档页数:8
读后续写原题目:A Four-legged Guardian AngelSnow had just melted off the ground that April day at our house in Regina Beach, Saskatchewan. I had just cleaned up the pool in preparation for selling the house. The year before, I had lost my job with the provincial government, and now our financial situation was grim. In despair, I had finally put the home on the market, and a real estate agent was due to show up later that day. Even worse, I would have to give up my beloved Great Dane (大丹犬), Brigitte, because I could no longer afford the cost of feeding it. The thought of losing the dog and our beautiful home was almost more than I could bear.Deep in despair, I sat typing up resumes and cover letters. Out of the corner of my eye I could see my thirteen-month-old son, Forrest, as he lay on the carpet, playing near our big, gentle nanny-dog, Brigitte. It seemed as if Brigitte was always meant to be in this family and she turned out to be a perfect companion.Brigitte came to our house on Christmas eve when the doorbell rang and I was sure some of my Christmas packages had arrived. I ran to the door and swung it open, but no one was there. I sensed something and looked down, only to find a beautiful Great Dane sitting there, looking up at me with big, intelligent eyes. There was no way that she could have rung the doorbell by herself, was there? Perhaps, someone had found the puppy somewhere and left her there, and then rang the doorbell and ran away. They accurately guessed I would welcome an additional family member and take care of her.Thinking of these, I couldn’t help heaving a sigh and went straight back to work. However, I hadn’t typed more than two sentences when Brigitte began barking furiously and running back and forth to the sliding glass door overlooking our pool.I raced to see what was happening and noticed that the sliding door was slightly open. Suddenly, I realized Forrest was nowhere to be seen. In panic, I opened the door and ran outside.注意:1.所续写短文的词数应为150左右;2.请按如下格式在答题卡的相应位置作答。

小学下册英语第1单元真题英语试题一、综合题(本题有100小题,每小题1分,共100分.每小题不选、错误,均不给分)1.Which one is a vegetable?A. BananaB. SpinachC. GrapeD. Peach2.My sister is a ______. She loves to create art installations.3. A __________ is a deep hole in the ground made by mining.4.We can see many ________ (野生动物) in the national park.5.I want to learn how to ________ (制作) videos.6.The invention of electricity transformed ________ (科技).7.Batteries generate energy through _______ reactions. (化学)8.The __________ (植物的形态与结构) varies widely among species.9.What is the capital of Bolivia?A. SucreB. La PazC. Santa CruzD. Cochabamba10.The _____ (butterfly/bird) is colorful.11.The __________ can reveal the impact of climate on geological formations.12.The pig loves to roll in ______ (泥).13.What do you use to cut paper?A. PencilB. GlueC. ScissorsD. TapeC14.What is 7 + 3?A. 9B. 10C. 11D. 1215.My teacher is very ________ (友好) and helps us learn.16.The ancient city of Athens was known for its ________.17.The ancient Romans built roads to connect their ______ (城市).18.I have a _____ (储蓄罐) where I keep my money. 我有一个储蓄罐,把我的钱存放在里面。
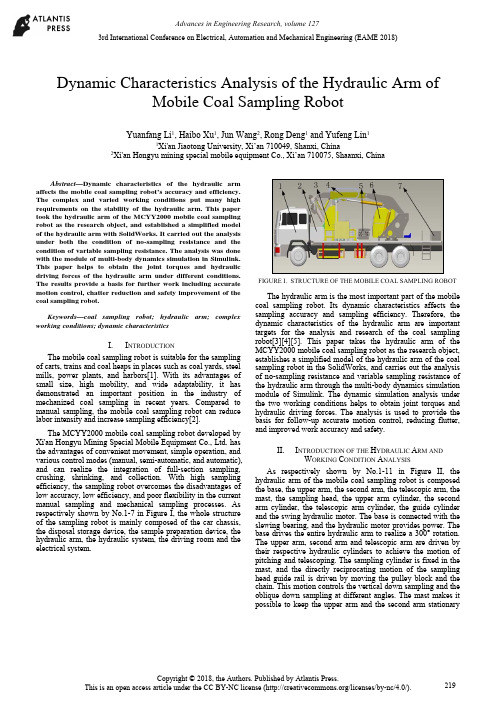
Dynamic Characteristics Analysis of the Hydraulic Arm ofMobile Coal Sampling RobotYuanfang Li1, Haibo Xu1, Jun Wang2, Rong Deng1 and Yufeng Lin11Xi'an Jiaotong University, Xi’an 710049, Shanxi, China2Xi'an Hongyu mining special mobile equipment Co., Xi’an 710075, Shaanxi, China Abstract—Dynamic characteristics of the hydraulic armaffects the mobile coal sampling robot’s accuracy and efficiency.The complex and varied working conditions put many highrequirements on the stability of the hydraulic arm. This papertook the hydraulic arm of the MCYY2000 mobile coal samplingrobot as the research object, and established a simplified modelof the hydraulic arm with SolidWorks. It carried out the analysisunder both the condition of no-sampling resistance and thecondition of variable sampling resistance. The analysis was donewith the module of multi-body dynamics simulation in Simulink.This paper helps to obtain the joint torques and hydraulicdriving forces of the hydraulic arm under different conditions. The results provide a basis for further work including accurate motion control, chatter reduction and safety improvement of the coal sampling robot.Keywords—coal sampling robot; hydraulic arm; complex working conditions; dynamic characteristicsI.I NTRODUCTIONThe mobile coal sampling robot is suitable for the sampling of carts, trains and coal heaps in places such as coal yards, steel mills, power plants, and harbors[1]. With its advantages of small size, high mobility, and wide adaptability, it has demonstrated an important position in the industry of mechanized coal sampling in recent years. Compared to manual sampling, the mobile coal sampling robot can reduce labor intensity and increase sampling efficiency[2].The MCYY2000 mobile coal sampling robot developed by Xi'an Hongyu Mining Special Mobile Equipment Co., Ltd. has the advantages of convenient movement, simple operation, and various control modes (manual, semi-automatic, and automatic), and can realize the integration of full-section sampling, crushing, shrinking, and collection. With high sampling efficiency, the sampling robot overcomes the disadvantages of low accuracy, low efficiency, and poor flexibility in the current manual sampling and mechanical sampling processes. As respectively shown by No.1-7 in Figure I, the whole structure of the sampling robot is mainly composed of the car chassis, the disposal storage device, the sample preparation device, the hydraulic arm, the hydraulic system, the driving room and the electrical system.FIGURE I. STRUCTURE OF THE MOBILE COAL SAMPLING ROBOT The hydraulic arm is the most important part of the mobile coal sampling robot. Its dynamic characteristics affects the sampling accuracy and sampling efficiency. Therefore, the dynamic characteristics of the hydraulic arm are important targets for the analysis and research of the coal sampling robot[3][4][5]. This paper takes the hydraulic arm of the MCYY2000 mobile coal sampling robot as the research object, establishes a simplified model of the hydraulic arm of the coal sampling robot in the SolidWorks, and carries out the analysis of no-sampling resistance and variable sampling resistance of the hydraulic arm through the multi-body dynamics simulation module of Simulink. The dynamic simulation analysis under the two working conditions helps to obtain joint torques and hydraulic driving forces. The analysis is used to provide the basis for follow-up accurate motion control, reducing flutter, and improved work accuracy and safety.II.I NTRODUCTION OF THE H YDRAULIC A RM ANDW ORKING C ONDITION A NALYSISAs respectively shown by No.1-11 in Figure II, the hydraulic arm of the mobile coal sampling robot is composed the base, the upper arm, the second arm, the telescopic arm, the mast, the sampling head, the upper arm cylinder, the second arm cylinder, the telescopic arm cylinder, the guide cylinder and the swing hydraulic motor. The base is connected with the slewing bearing, and the hydraulic motor provides power. The base drives the entire hydraulic arm to realize a 300° rotation. The upper arm, second arm and telescopic arm are driven by their respective hydraulic cylinders to achieve the motion of pitching and telescoping. The sampling cylinder is fixed in the mast, and the directly reciprocating motion of the sampling head guide rail is driven by moving the pulley block and the chain. This motion controls the vertical down sampling and the oblique down sampling at different angles. The mast makes it possible to keep the upper arm and the second arm stationary3rd International Conference on Electrical, Automation and Mechanical Engineering (EAME 2018)during sampling, so the sampling accuracy can be higher. The sampling head is a spiral structure[6] and can complete the deep sampling into coal heaps with a depth of 2 meters.FIGURE II. STRUCTURE OF THE HYDRAULIC ARM The related size parameters of the hydraulic arm of the coal sampling robot are shown in Table I. The parameters in the table are all from the actual design parameters of the MCYY2000 mobile coal sampling robot.TABLE I. RELATED SIZES OF THE HYDRAULIC ARMComponent Size / mmupper arm 2900second arm 2700telescopic arm 1000mast 3400Sampling head 2100Complex and varied working conditions[7] of coal sampling projects put many high requirements on the stability of the dynamic characteristics of the hydraulic arm:(1) When the sampling head of the hydraulic arm is moving at a low speed and operating the pitching movement with no-sampling resistance, the torque of each joint and the driving force of the hydraulic cylinder should be changed smoothly with small amplitude, so that the hydraulic arm can maintain safety and stability during its adjustment of the sampling angle.(2) When the hydraulic arm is sampling at a fixed sampling angle, the sampling head is subject to a varying sampling resistance. At this time, the joint torques and the hydraulic driving forces must avoid sharp changes or exceeding its safety range[8] so that the coal sampling robot can stay safe. The key research of this paper focuses on the dynamic characteristics of the hydraulic arm of the coal sampling robot under the two working conditions.III.A NALYSIS OF D YNAMIC C HARACTERISTICS OF THEH YDRAULIC A RMTo build a virtual prototype, simplified models should be used as much as possible. In order to reduce the simulation time[9], the number of parts should be reduced as much as possible while satisfying the integrity of the virtual prototyping simulation movement. According to the actual size of the hydraulic arm and the types of hydraulic cylinders, the components including the base, the upper arm, the second arm, the telescopic arm, the mast, the sampling head and hydraulic cylinders are modeled and assembled in SolidWorks. The virtual prototype of the hydraulic arm of the coal sampling robot is shown in Figure III.FIGURE III. VIRTUAL PROTOTYPE MODEL OF THE HYDRAULICARMAs shown by No.1-8 in Figure IV. the simplified schematic diagram of the movement mechanism includes three joints - join1, joint2 and joint3 - and five hydraulic cylinders - cylinder1, cylinder2, cylinder3, cylinder4 and cylinder5. The range of the motion of each joint variable and cylinder driving variable is shown in Table II.FIGURE IV. MOTION MECHANISM OF THE HYDRAULIC ARM OFTHE COAL SAMPLING ROBOTTABLE II. RANGE OF JOINT ANGLES AND CYLINDER LENGTHS Joint angle Range /(°) Cylinder length Range / mmjoint θ1 66-130 cylinders1 1750-2750 joint θ2 90-160cylinder s2 1450-2300cylinder s3 2700-3700 joint θ3 60-135cylinder s4 1650-2650cylinder s5 3400-5500Import the assembled model into Simulink and generate a block diagram of the model. Set the appropriate material properties and apply the necessary constraints[10] for each component in the model, and add torque sensors and force sensors for the rotating joints and hydraulic cylinders. The signal window modules are also added. The general Simulink dynamic analysis block diagram after settings is shown in Figure V. The multibody structure diagram of the hydraulic arm is shown in Figure VI.FIGURE V. GENERAL SIMULINK DYNAMIC ANALYSIS BLOCKDIAGRAMFIGURE VI. SIMSCAPE MULTIBODY STRUCTURE DIAGRAM A.Analysis of the Dynamic Characteristics of the HydraulicArm of Coal Sampling Robot under the Condition of No-sampling ResistanceWhen the hydraulic arm is under the no-sampling resistance condition, the sampling head only performs low-speed pitching movements. At this time, each joint torque and the hydraulic cylinder driving force should be stable and be of small-scale changes, so that the coal sampling robot can remain safe and stable during the adjustment of its sampling angle. When analyzing the dynamic characteristics of the hydraulic arm under this condition, the sampling resistance is set to zero. The curve of the length of the hydraulic cylinder s4 is shown in Figure VII. The lengths of cylinders s1, s2, s3 and s5 are respectively set to 2250mm, 1950mm, 2700mm and 3400mm. According to the relationship between the joint variables and the cylinder driving variables, the curve of the joint angle θ3 is shown in Figure VIII.FIGURE VII. CURVE OF THE LENGTH OF CYLINDER 4FIGURE VIII. CURVE OF JOINT ANGLE θ3The curves of the joint torques and the hydraulic cylinder driving forces are respectively shown in Figure IX and Figure X. With the extension and retraction of the mast cylinder s4, the torques of the joint1-joint3 firstly increase and then decrease within a smaller range, and the change trend is relatively stable. The torque of joint1 is the largest. The torque of joint2 is the next, and the torque of joint3 is the smallest. The driving forces of the hydraulic cylinders also change smoothly. The driving force of the hydraulic cylinder1 is the largest, and the driving force of the hydraulic cylinder3 remains basically unchanged.The results show that when the hydraulic arm of the coal sampling robot performs low-speed swing movement of its sampling head under the condition of no-sampling resistance, the joint torques and the driving forces of the hydraulic cylinders change smoothly and slightly. The driving forces of the hydraulic cylinders mainly overcome the effect of gravity. The simulation results are in accordance with the actual situation.FIGURE IX. CURVES OF JOINT TORQUESFIGURE X. CURVES OF CYLINDER DRIVING FORCESB.Analysis of the Dynamic Characteristics of the HydraulicArm of Coal Sampling Robot under the Condition ofVariable ResistanceIn the sampling process, the sampling head of the coal sampling robot is mainly subjected to three external loads including the insertion resistance, the gravity of coal and the lifting resistance. The insertion resistance and the ascending resistance are uncertain under different working conditions. According to formulas and relevant experiences, the insertion resistance and the ascending resistance are respectively set to 6000 N and 5000 N. The designing parameters of the coal sampling robot show that the coal sampling weight is about 200N, which is much smaller compared with the other two resistances. Therefore, the curve of the sampling resistance during vertical sampling process is shown in Figure XI. According to this, the dynamic characteristics of the hydraulic arm of the coal sampling robot under the variable resistance condition can be verified.FIGURE XI. CURVE OF THE SAMPLING RESISTANCEFIGURE XII. CURVE OF THE LENGTH OF CYLINDER 5 When analyzing the dynamic characteristics of the hydraulic arm under the variable resistance condition, the joint angles θ1 and θ2 respectively maintain 70° and 110°. The joint angle θ3 is set to 90°, which means the sampling head performs vertical sampling at a sampling angle of 90°. Curve of the length of Hydraulic cylinder 5 is shown in Figure XII.As shown in Figure XIII and Figure XIV when the sampling resistance is given, the curves of the joint torques and the driving forces of the hydraulic cylinders are no longer smooth. Instead, they show sharp turning changes with the changes of the sampling resistance. The joint 1 and the joint 2 show large torques and relatively large variation. The joint 3 shows relatively small torque. The driving forces of the hydraulic cylinder 1 and the hydraulic cylinder 2 are relatively large and the amplitude of their changes is also large. The driving forces of the hydraulic cylinder 4 and the hydraulic cylinder 5 change within a little range and are relatively stable. The hydraulic cylinder 3 basically has no change of driving force under this condition.The results show that the joint torques and the driving forces of the hydraulic cylinders have turning changes under the condition of variable resistance. Due to the low moving speed of the sampling head, the influence of inertial force and inertia torque is relatively small[11]. The driving forces of the hydraulic cylinders mainly overcome the gravity of the arm itself and the external sampling resistance. The simulation results are in accordance with the actual situation.FIGURE XIII. CURVES OF JOINT TORQUESFIGURE XIV. CURVES OF CYLINDER DRIVING FORCESIV.C ONCLUSIONSThis paper took the hydraulic arm of the MCYY2000 mobile coal sampling robot as the researching object. It established a simplified model of the hydraulic arm with SolidWorks, and carried out the dynamic simulation analysis of the hydraulic arm under both the condition of no-sampling resistance and the condition of variable resistance with the Simulink. The simulation results are basically in accordance with the actual situation.(1) Under the condition of no-sampling resistance, the hydraulic arm of the coal sampling robot performs low-speed swing movement of the sampling head. The joint torques and the driving forces of the hydraulic cylinders change smoothly and slightly. The driving forces of the hydraulic cylinders mainly overcome the effect of gravity.(2) Under the condition of variable resistance, the joint torques and the driving forces of the hydraulic cylinders show turning changes. Due to the low moving speed of the sampling head, the influence of inertial force and inertial torque are relatively small. The driving forces of the hydraulic cylinders mainly overcome the gravity of the arm itself and the external sampling resistance.In this paper, the joint torques and hydraulic driving forces of the hydraulic arm are obtained through dynamic simulation analysis. The results help to provide a basis for further work including accurate motion control, chatter reduction and safety improvement of the coal sampling robot.A CKNOWLEDGMENTThanks to the support of Xi'an Hongyu Mining Special Mobile Equipment Co., Ltd. And thanks to the help of Shaanxi Science & Technology Co-ordination & Innovation Project.R EFERENCES[1]Yang Jinhe and Liu Enqing. Discussion on mechanized sampling ofcommercial coal [J]. Coal Processing & Comprehensive Utilization, 2007(04): 29-30.[2]Sun Gang. Research on Performance Index of Coal Sampling Machine[J].Journal of China Coal Society, 2009, 34(06): 836-839.[3]Qu Can. Virtual Design of Sampling Arm for Vehicle Coal samplingrobot [D]. Xi'an: Chang’an University, 2014.[4]Lu Na. Dynamic Analysis of Sampling Arm of Coal Sampling MachineBased on ANSYS [D]. Xi'an: Chang’an University, 2014.[5]Li Longlong. Inverse Kinematics Analysis and Sampling TrajectoryControl Simulation of Coal Sampling Arm [D]. Xi'an: Xi’an University of Architecture and Technology, 2014.[6]Li Xuta, He Lile, Zhang Youzhen and Leng Mingyou. Analysis of SpiralDrill Pipe Fatigue Strength of Spiral Coal Sampling Device [J]. Coal Engineering, 2012(11): 93-94+98.[7]Zhu Xiaoyong and Zhang Yuangen. Common problems in coal samplingand its solution [J]. Modern Industrial Economy and Informationization, 2017, 7(16): 72-74.[8]Chen Chuanxiong and Kong Jian. Optimization Design and Analysis ofCoal Sampling Robot Transmission System [J]. Coal Technology, 2016,(02): 259-262.[9]Geng Chunxia and Ye Feng. Research on the Optimized Design ofSampling Arm of Coal Sampling Machine [J]. Coal Technology, 2013,(12): 14-16.[10]SUN Xuguo, HUANG Sunzhuo, LIN Shuwen, et al. Modeling andsimulation of excavator mechanism dynamics based on Matlab[J].Mechanical Engineer, 2007(9): 91-93.[11]Zheng Deshuai, Gu Lichen, Zhang Ping and Jia Yongfeng. AMESimmodeling and feasibility analysis of a new coal sampling arm [J].Machine Tool & Hydraulics, 2013, 41(13): 155-157.。
中英文对照学习版Harry Potter and Philosopher’s Stone《哈利波特与魔法石》CHAPTER SevenThe Sorting Hat第七章分院帽The d oor swung open at once. A tall, black-haired witch in emeral d-green robes stood there. She had a very stern face and Harry’s first thought was that this was not someone to cross.大门立时洞开。
一个身穿翠绿色长袍的高个儿黑发女巫站在大门前。
她神情严肃,哈利首先想到的是这个人可不好对付。
‘The firs’-years, Professor McGonagall,” said Hagrid.“一年级新生,麦格教授。
”海格说。
‘Thank you, Hagrid. I will take them from here.’“谢谢你,海格。
到这里就交给我来接走。
”She pull ed the d oor wide. The Entrance Hall was so big you coul d have fitted the whol e of the Dursleys’house in it. The stone walls were lit with flaming torches like the ones at Gringotts, the ceiling was too high to make out, and a magnificent marbl e stairase facing them l ed to the upper fl oors.她把门拉得大开。
门厅大得能把德思礼家整栋房子搬进去。
像古灵阁一样,石墙周围都是熊熊燃烧的火把。

针对山羊除草这件事的英语观点作文全文共6篇示例,供读者参考篇1Goats Are Great Weed Whackers!Have you ever seen a goat eating weeds? It's pretty funny to watch! Their mouths are always going "chomp chomp chomp" on grass, leaves, and all kinds of plants. That's why some people use goats to get rid of weeds and overgrown plants instead of pulling them out or spraying weed killer. Using goats for jobs like this is called "goatscaping."Goatscaping is really cool because goats love eating stuff that humans think is just pesky weeds and brush. Weeds like kudzu, poison ivy, privet, and honeysuckle are treats for goats. They'll even munch on thistles, brambles, and bushes that have thorns all over them. It doesn't bother the goats one bit because their lips are really tough.But don't worry, goats aren't dumb. They know not to eat things that could make them sick like oleander or rhododendron plants. Goats are picky eaters in their own way! They usuallyleave trees, flowers, and vegetable gardens alone too unless they get really desperate for a snack.Using goats for clearing weeds is a lot better than pulling weeds by hand or using nasty chemicals. Pulling weeds is no fun at all - it gives you blisters and a sore back. Weed killer sprays can be dangerous for the environment and hurt insects like bees that are important for plants. With goats, you don't need any of that stuff.The goats do all the hard work of chomping down every last weed stem and leaf. Best of all, their poop acts as natural fertilizer to make the soil better instead of chemical sprays that can be harmful. Isn't that so cool? You can just recycle goat poop right back into the ground.Goatscaping helps get rid of weeds in places that are hard for humans to reach too, like steep hills, under bridges, along railroads, and in cracks and crevices. The goats can clamber around and stick their faces into those areas to munch away. That's something a riding lawnmower or weed whacker can't do!Of course, you need to keep a very close eye on the goats while they're working. They are pretty smart but they'll wander off looking for more snacks if you don't watch them carefully. An electric fence or a goat-herding dog is helpful for that.Some places even rent out herds of goats for a few days or weeks to clear away overgrown brush and weeds. That's handier than owning your own goats if you just need goatscaping done once in a while. The goats come do their job, then get moved to a new spot. It's like a landscaping clean-up crew, but way cuter!Using goats has become a popular way to clear weeds at parks, airport runways, cemeteries, campgrounds, and orchards. They don't make noise like lawnmowers and leaf blowers, so goatscaping works great for keeping areas tidy without disturbing people trying to enjoy peace and quiet.Lots of schools have started using goatscaping too since it's safer than chemicals around kids. My friend's elementary school got a tiny herd of goats to chomp down the weeds around their baseball field and playground last year. We all thought it was hilarious watching the goats munching away while we played. Nothing's funnier than seeing a goat's lips getting stuck on a metal fence post for a second while they gobble goodies on the other side!I really hope my school gets some goats for goatscaping too. I've been trying to convince my principal that it would be an awesome way to learn about environmental science and animals. We could rotate classes to "goat monitor" duty, making sure thegoats have water, don't escape, and aren't eating anything they shouldn't. We'd get to see them hard at work while learning responsibility.Goatscaping probably isn't the solution for every overgrown lot or field, but I think it's such a neat idea. It's an eco-friendly way to get rid of weeds without any pollution from chemicals or gas-powered tools. The goats don't mind doing the hard work as long as they get treats like brambles, poison ivy, and kudzu to munch on in return. Using them is like hiring an army of hungry munching machines that fertilize while they work - how cool is that?If I had my way, I'd use goats for goatscaping everywhere instead of lawn mowers and weed whackers. Goats are way more entertaining to watch, and we'd have less problems with noisy equipment or chemicals getting into the environment. Just imagine how fun it would be to have goats happily chowing down on weeds in your neighborhood! The only downside is you might need to goat-proof your veggie garden if they get too ambitious. But in my opinion, having a bunch of hungry goat lawnmowers is totally worth it!篇2Goats Are Great Weed Whackers!Have you ever seen a goat munching on grass and weeds in a field or someone's backyard? Those furry, four-legged lawnmowers are awesome at getting rid of pesky plants that we don't want around. I think using goats for weed control is a great idea that more people should try out. Let me tell you why!First off, goats are very hungry little creatures. Their tummies are like bottomless pits when it comes to eating up leaves, vines, bushes and all sorts of vegetation. A single goat can chomp through piles of weeds and shrubs way faster than a person could with pruning shears or a lawnmower. And the best part is, goats never get tired of eating! As long as there are weeds around, they'll happily keep on munching.Imagine if your school playground or local park had a really bad weed problem. The grass is overgrown, prickly brambles are taking over, and there are thistles and thorny bushes everywhere you step. Sending in a herd of hungry goats would make that whole mess disappear in no time flat! Those four-legged eating machines would make quick work of clearing out all the unwanted plants.Not only are goats super hungry weed eaters, but they can also go places that traditional landscaping equipment can'teasily access. Goats are small and nimble, so they can squeeze through tight spaces to get at weeds growing on steep hills, around ponds, next to fences and buildings, and in otherhard-to-reach areas. Their perseverance and agility allows them to thoroughly clear out every last weed from even the most overgrown spots.Using goats for natural, eco-friendly weed control is also much better for the environment than spraying a bunch of harsh chemicals everywhere. Herbicides and pesticides can be really harmful to plants, animals and people if they get into the soil, water or air. But when you let goats do the weeding, there's no pollution at all! It's just nature taking care of nature. Plus, their poop acts as excellent natural fertilizer to help new plants grow.Renting a few goats to clear out unwanted vegetation is cheaper than paying human workers to do all that tedious manual labor too. Goats are happy to work all day grazing for free as long as you give them a safe place to roam with plenty of food sources. No wages, health insurance or coffee breaks required! You'd just need to make sure the goats have access to fresh water, some shade to cool off in, and a portable shelter to sleep in overnight. Way easier on the budget than hiring a landscaping crew!Probably the best reason to use goats as natural lawnmowers is because they are just so darn cute and fun to watch! I mean, who doesn't love those floppy ears, funny bearded faces and constant "baaaah" noises goats make? They are always up to hilarious goat antics, like jumping straight up into the air, climbing on top of objects, and having epichead-butting competitions. Goats bring a ton of amusement and delight anywhere they go!Just imagine how awesome it would be if our school brought in some goats to get rid of the prickly weed patch behind the soccer field. We could go out and watch the hungry herd hard at work during recess, laughing at their silly goat behavior. Learning would be much more fun and memorable if we got to interact with those goofy barnyard animals up close! I'm sure having resident goats on campus would become every kid's favorite school attraction.In conclusion, I truly believe utilizing goats for weed control is an excellent idea that more people should absolutely consider. Those ravenous ruminant residents would make quick work of eliminating overgrown weeds from any area while also providing free eco-friendly fertilizer. Best of all, goats are extremelylow-maintenance workers that bring endless joy, amusement and educational opportunities wherever they go!So please, let's get more goats out there helping to landscape and manage vegetation across neighborhoods, parks, schools and beyond. Those four-legged lawnmowers are the ultimate all-natural, sustainable solution to pesky weed problems. Hiring herds of hungry goats is good for the environment, good for the community, and good for putting big smiles on everyone's faces! Let's bring on the goat grazers!篇3Goats: The Best Weed Eaters Ever!Hi friends! Today I want to tell you all about why goats are sooooo awesome at getting rid of weeds and brush. I learned about this in school and it's really cool. First, let me ask you - have you ever had to pull a bunch of weeds in your yard or garden? It's no fun, is it? It takes forever and those weeds are stubborn! They don't want to come out of the ground. Well, that's where the goats come in.Goats love eating weeds and brush! Their favorite foods are things like blackberry bushes, poison ivy, kudzu vines, and thistle. Yuck, those plants are so prickly and gross. But goats don't mindat all. In fact, they think those plants are delicious! With their tough mouths, they can eat even the most stubborn weeds right down to the ground.Using goats for weed control is called "targeted grazing." Instead of people having to pull weeds by hand or use chemicals that could be bad for the environment, you just let the goats loose and they'll clear everything for you by eating it! Isn't that clever?Lots of places are starting to use goats to get rid of weeds and brush. Parks, fields, forests, even yards and gardens can all get the goat treatment. The goats show up with their owner, who is called a herder or a goatherd. Then the herder sets up portable fencing to keep the goats contained in just the area that needs to be cleared.The goats get right to work, munching away at anything green and leafy. Their mouths are tough and they can even eat brambles and thorny plants that would hurt our mouths. It's like they have teeth made of steel! And get this - a herd of just 20 goats can clear about one acre of heavy brush and weeds in a single day! That's way faster than a person with sheers or a lawnmower could do it.Using goats is great for the environment too. They are a renewable, living lawnmower and weed-eater. Unlike gas mowers and weed-whackers that make pollution and noise, goats are quiet and don't produce any emissions. Their poop even acts as natural fertilizer to help new plants grow!There are so many cool things about using goats. For example, they can get into tight spaces and steep slopes that big mowers can't reach. At the same time, they're so nimble and can climb over rocks, logs, or anything in their way as they munch through an area. Goats even have a secret superpower - they can eat poison ivy, poison oak, and other toxic plants without any problem! It's like they have a forcefield around their mouths. People sure can't do that.After the goats have cleared an area, all you have left are little piles of fertilizer pellets from their poop. In just a couple weeks, new grass and wildflowers start growing back all lush and green. It's amazing! You don't have to re-seed it or anything. The goats leave behind the perfect fresh start for new plants.I think my favorite thing about using goats is how happy they are while working. Goats are such funny, friendly animals. They make all kinds of wacky sounds like baaaahing and bleating. They even seem to do a little dance with their tails stickingstraight up as they munch through thick patches of vegetation. To them, it's like an all-you-can-eat buffet in every spot they go!When the goats are done clearing a section, the herder just moves their portable fencing over to the next area that needs work. The process starts all over with the hungry, hard-working goats eating everything in sight. You can even get the same herd of goats to come back a few times per year to keep an area maintained by eating any new growth of weeds or brush.So in the end, goats are the absolute best solution for weed control ever! They work quickly, cheaply, quietly, and in an environmentally friendly way. Goats never get tired like humans do, and clearing weeds is their absolute favorite job. It's a win for goats, a win for people, and a win for the whole planet! Now isn't that something to bleat about? Baaaaaaahhhh!篇4Using Goats to Eat the Weeds? Baaaah, What a Great Idea!Hi there! My name is Jamie and I'm 10 years old. Today I want to tell you all about why I think using goats for weed control is just the coolest idea ever. You might be thinking "Goats? For getting rid of weeds? That doesn't sound right!" Buttrust me, it's an awesome natural way to keep weeds under control without using harsh chemicals. Let me explain!First of all, goats will篇5Goats are the Best Weed Eaters!Hi there! My name is Jamie and I'm in 5th grade. Today I want to tell you all about why goats are awesome for getting rid of weeds and keeping areas clear of plants you don't want around. I think using goats is way better than spraying chemicals or having people do hard work pulling up weeds. Goats are the coolest weed eaters ever!First of all, goats are total chow hounds when it comes to weeds and brushy plants. Those dudes will munch on just about any leafy green plants, vines, shrubs, and tree saplings. They'll even strip the bark off bigger trees if you let them! With their funny rectangular pupil eyes, goats can spot the greenest, tastiest leaves from a mile away. And boy do they love to eat! A full-grown goat can chow down 4-8 pounds of plant matter every single day. That's like eating an entire Thanksgiving dinner...every day! No wonder goats are such chubsters.Watching goats eat is probably the funniest thing ever too. They use their cool rectangular tongue that's bluish on the top to wrap around leaves and yank them into their mouths. Chomp chomp chomp, those guys never stop eating! And they make the weirdest sounds while they're grazing - "Baaaaaah! Mmmmmmmbaaaah!" It's like they're singing songs about how delicious the weeds are. Except the songs are just a bunch of loud goat screams. I bet a heavy metal band made of goats would be so epic!Another awesome thing about using goats is that they can go places that machines and humans can't easily access. Goats are fantastic climbers and can shimmy along steep slopes, dams, stream banks, and other hard to reach areas that are often overrun with unstoppable weeds. Their neat split hooves let them keep a solid foothold while reaching up to strip away vines and saplings. They're like living weed whackers...if weed whackers had hooves and could faint from sudden loud noises.Did you know that many parks, orchards, urban areas, and even military bases use goats now for eco-friendly weed control? It's true! They rent herds of hungry goats to clear out overgrown areas in a way that doesn't pollute with chemicals or damage the environment as much as machines. And get this - the goats eveneat poisonous and thorny weeds that most animals won't touch! Those daredevil weed-terminators have stomachs of steel.Probably the coolest thing about using goats is that it's way safer and more environmentally-friendly than spraying a bunch of harsh chemical weed killers everywhere. Those toxic chemicals can pollute water, hurt wildlife, and make people sick if they touch or breathe them in. Yuck! With goats, the only thing spreading around is their funky aroma. But that just smells like a goat hanging out in a barn. No toxins required!Plus, goats are sooooo cute! I mean, could you ever stay mad at a face like that? With their bright, rectangle-slit eyes, floppy ears, and smiley mouths, goats always look like they're laughing. And their coat colors are awesome - you can find goats that are brown, black, white, tan, or multi-colored. Some of them look like little shaggy mops! Others have super long silky hair trailing behind them. And kids (baby goats) are perhaps the most adorable little fluffballs you'll ever see.Of course, you can't just set goats loose anywhere and expect them to behave. Goats need humans to control them through herding, fencing, and moving them around to different areas when they've cleared out the weeds. Otherwise those little escape artists might wander into places you don't want them andstart munching on flowers, crops, or even people's backyard gardens! Supervising the goats takes effort, but it's worth it to have an eco-friendly weed disposal crew.The only real downsides I can think of are that goats tend to be loud, smelly, and kinda destructive if left unattended. Their insane eating habits can also quickly clear an area of ALL plant life if you're not careful about rotating them. An area trashed by a grazing goat herd gets pretty barren - like a group of miniature lawnmowers have been through. But that's kind of the point when you're de-weeding a space!So in conclusion, I think goats are basically the coolest, most hilarious way to get rid of unwanted weeds and plants. They're green and safe for the environment. They work hard by just doing what they love - eating everything in sight! And come on, who doesn't love a funny looking goat? I dream of having a pet goat one day. Except I'd probably go broke buying tasty shrubs to satisfy its monstrous appetite. Oh well, a kid can dream! Now if you'll excuse me, I have a pile of grass clippings to munch on. Baaaaaaahh篇6Goats are the Best Weed Eaters!I think goats are really cool animals that can help get rid of weeds in a fun and environmentally friendly way. Let me tell you all about why I believe using goats for weed control is such a great idea!First of all, goats will literally eat almost any type of plant or weed. Their tummies are like bottomless pits when it comes to munching on leaves, vines, bushes and plants of all kinds. Goats don't get。
四足步行机器人行走机构设计毕业设计篇一:四足步行机器人腿的机构设计毕业论文毕业设计(论文)四足步行机器人腿的机构设计学生姓名:学号:所在系部:专业班级:指导教师:日期:摘要本文介绍了国内外四足步行机器人的发展状况和三维制图软件SolidWorks的应用,着重分析了设计思想并对行走方式进行了设计并在此软件基础上四足步行机器人腿进行了绘制,对已绘制的零部件进行了装配和三维展示。
展示了SolidWorks强大的三维制图和分析功能。
同时结合模仿四足动物形态展示出了本次设计。
对设计的四足行走机器人腿进行了详细的分析与总结得出了该机构的优缺点。
本文对四足机器人腿的单腿结构分析比较详细,并结合三维进行理性的理解。
关键词:SolidWorks;足步行机器人腿AbstractIn this paper, fouth inside and outside the two-legged walking robot and the development of three-dimensional mapping of the application of SolidWorks software, focused on an analysis of designconcepts and approach to the design of walking and (原文来自:小草范文网:四足步行机器人行走机构设计毕业设计)the basis of this software quadruped walking robot legs have been drawn on components have been drawn to the assembly and three-dimensional display. SolidWorks demonstrated a strong three-dimensional mapping and analysis functions. At the same time, combined with four-legged animal patterns to imitate the design show. The design of four-legged walking robot legs to carry out a detailed analysis and arrive at a summary of the advantages and disadvantages of the institution. In this paper, four single-legged robot more detailed structural analysis, combined with a rational understanding of three-dimensional.Keywords: SolidWorks; four-legged walking robot 目录摘要 ................................................ ................................................... . (I)Abstract .......................................... ................................................... (II)1 绪论 ................................................ ................................................... .. (1)1.1 步行机器人的概述 ................................................ .. (1)1.2 步行机器人研发现状 ................................................ . (1)1.3 存在的问题 ................................................ .. (5)2 四足机器人腿的研究 ................................................ .. (6)2.1 腿的对比分析 ................................................ . (6)2.1.1 开环关节连杆机构 ................................................ (6)2.1.2 闭环平面四杆机构 ................................................ . (9)2.2 腿的设计 ................................................ (11)2.2.1 腿的机构分析 ................................................ (12)2.2.2 支撑与摆动组合协调控制器 ................................................ . (18)2.3 单条腿尺寸优化 ................................................ . (21)2.3.1 数学建模 ................................................ .. (21)2.3.2 运动特征的分析 ................................................ .. (23)2.4 机器人腿足端的轨迹和运动分析 ................................................ . (24)2.4.1 机器人腿足端的轨迹分析 ................................................ .. (24)2.4.2 机器人腿足端的运动分析 ................................................ .. (27)3 机体设计................................................. ................................................... . (30)3.1 机体设计 ................................................ (30)3.1.1 机体外壳设计 ................................................ (30)3.1.2 传动系统设计 ................................................ (31)3.2 利用Solid Works进行腿及整个机构辅助设计 (35)4 结论 ................................................ ................................................... (36)4.1 论文完成的主要工作 ................................................ .. (36)4.2 总结 ................................................ ................................................... .. 36参考文献 ................................................ ................................................... .. (37)致谢 ................................................ ................................................... (39)1 绪论1.1 步行机器人的概述机器人相关的研发和应用现如今早已变成每个国家的重要科研项目之一,通过运用机器人来代替人们的某些危险工作或者帮助残疾人完成自己所不能完成的事情。

某总体设计仿真平台的设计与开发摘要:随着科技水平的不断提高,仿真技术越来越受到了广泛的关注和应用。
为了满足不同领域仿真需求,本文设计并开发了一种通用的总体设计仿真平台,可以结合不同仿真软件和工具,实现设计、分析和仿真等多种功能。
首先,本文介绍了仿真平台的背景和研究意义,分析了国内外研究现状和应用情况。
其次,本文概述了仿真平台的设计和架构,包括系统组成、数据结构、功能模块和接口设计等方面。
然后,本文具体介绍了仿真平台的实现过程和技术方案,包括软件选型、算法设计、接口开发和测试验证等方面。
最后,本文进行了仿真实验和性能评估,验证了仿真平台的可行性和优越性。
本文的研究成果对于加强总体设计仿真技术的研究和应用具有重要的参考价值。
关键词:总体设计仿真平台、多功能、技术方案、仿真实验、性能评估Abstract:With the continuous improvement of technology, simulation technology has received widespread attention and application. In order to meet the simulation needs in different fields,this paper designed and developed a universal overall design simulation platform, which can combine different simulation software and tools to achieve various functions such as design, analysis and simulation. Firstly, this paperintroduces the background and research significance of the simulation platform, and analyzes the research status and application of domestic and foreign research. Secondly, thispaper outlines the design and architecture of the simulation platform, including system composition, data structure, function modules and interface design. Then, this paper specifically introduces the implementation process and technical scheme of the simulation platform, includingsoftware selection, algorithm design, interface development and test verification. Finally, this paper carries out simulation experiments and performance evaluation, andverifies the feasibility and superiority of the simulation platform. The research results of this paper have important reference value for strengthening the research andapplication of overall design simulation technology.Keywords: overall design simulation platform, multifunctional, technical scheme, simulation experiment, performanceevaluationThe overall design simulation platform developed in thisstudy is a multifunctional platform with various technical schemes integrated into it. This platform enables users to carry out comprehensive design simulations including product design, interface development, and test verification. The technical schemes used in this platform cover various design and simulation aspects, such as system modeling, virtual prototyping, and simulation optimization.The simulation platform is designed to provide a user-friendly interface that allows easy navigation of different design tasks. Users can easily access the platform'sdifferent functions, tools and features, and choose from different technical schemes and models to carry out theirdesign simulations. The platform provides a streamlined workflow that ensures efficient and effective design simulations, helping users to save time and resources.The platform includes simulation experiments to validate the design models and identify areas for improvement. This feature enables users to optimize their designs by simulating different scenarios and testing different parameters. Through these simulations, users can identify the best design solutions based on the expected outcomes and criteria.Furthermore, the performance evaluation feature of the platform is essential in measuring the effectiveness and efficiency of the design models. This feature analyzes the system's performance through various metrics, such as accuracy, speed, and reliability. By evaluating the design's performance, users can identify and address design flaws and optimize the design for better performance.Overall, the developed simulation platform is a useful tool for designers, researchers, and engineers who want to improve their overall design process. The platform's multifunctional design and various technical schemes make it a versatile and flexible solution for different design needs. The simulation experiment and performance evaluation features enable users to optimize their designs to meet their intended purposes.Furthermore, the platform's user-friendly interface and visualization tools enable users to easily understand and analyze the simulation results, facilitating better decision-making processes. The platform also allows for easycustomization and adaptation to specific design needs, allowing users to tailor the simulation parameters to their specific design requirements.However, there are certain design flaws that can be improved upon to further enhance the platform's performance. For instance, the platform's simulation capabilities can be expanded to include more complex and advanced simulation models, such as multi-physics, multi-scale, and multi-task simulations. This would enable users to simulate more intricate designs and achieve more accurate results.Additionally, the platform's computational efficiency can be improved by optimizing the simulation algorithms and minimizing the computational time required for each simulation run. This would enable users to run simulations faster and thus reduce the overall design cycle time.Another potential improvement would be to incorporate artificial intelligence (AI) and machine learning (ML) techniques into the platform. This would enable the platform to learn and adapt to the user's design requirements, automatically generating optimized designs based on input parameters and past simulation results.In summary, while the developed simulation platform is already a useful tool for designers and engineers, there is still room for improvement. By addressing the aforementioned design flaws and incorporating advanced technologies such as AI and ML, the platform's performance could be furtherenhanced, enabling users to design and optimize their products more efficiently and effectively.Additionally, the simulation platform could benefit from incorporating more advanced visualization tools, enabling designers to better understand the behavior and performance of their designs. This could include the ability to view simulations in real-time, with the ability to adjust settings and parameters on-the-fly.Furthermore, by integrating with other software tools commonly used in the design process (such as CAD software and 3D printing tools), the simulation platform could enable designers to create more accurate and effective designs, while also streamlining the design process.Another potential improvement for the simulation platform would be to enable users to collaborate more effectively. This could include features such as real-time data sharing, simultaneous simulations, and the ability to easily compare and contrast different designs.Finally, the simulation platform could benefit from improved documentation and training resources, helping new users get started more quickly and effectively. This could include detailed tutorials, video resources, and access to a community of experienced users and experts.Overall, while the simulation platform described here is already a useful tool for designers and engineers, there are numerous opportunities for improvement. By addressing thesedesign flaws and incorporating the latest technologies and best practices, the platform could help users design and optimize their products more efficiently and effectively, driving innovation across a wide range of industries.Furthermore, one potential area for improvement is in the platform’s user interface (UI) and user experience (UX) design. While the current platform is functional and provides access to a wealth of simulation tools, it can be difficult for new users to navigate and find the features they need. By focusing on improving the UI and UX, the platform could become much more user-friendly and accessible to a wider range of users.Another opportunity for improvement is in the platform’s data visualization capabilities. While the current platform provides some basic visualizations, it could benefit from more advanced data visualization tools that enable users to more easily interpret and analyze simulation results. This could include features such as interactive 3D models or animated simulations that allow users to see how different design changes impact product performance.Finally, the platform could benefit from greater integration with other design and engineering tools. For example, by integrating with popular CAD software, the platform could enable users to easily import and export design files, and simulate the performance of their designs in real-time. Similarly, by integrating with tools for materials science, manufacturing, and supply chain management, the platform could enable users to make more informed decisions aboutmaterials selection, production processes, and supply chain optimization.In conclusion, the simulation platform described in this article has the potential to revolutionize the way that designers and engineers approach product design and optimization. By leveraging advanced simulation tools, data analytics, and machine learning, the platform enables users to create and test designs in a virtual environment, makingit possible to identify and address potential performance issues before a product is ever manufactured. While the platform is already a valuable and powerful tool for designers and engineers, there are numerous opportunities for improvement, including in the areas of UI and UX design, data visualization, and tool integration. By addressing these issues, the platform could become an even more effective tool for driving innovation across a wide range of industries.One area where the digital twin platform could be improved is in user interface (UI) and user experience (UX) design. Currently, the platform can be complex and difficult to navigate, particularly for users who are not engineers or designers. In order to make the platform more accessible, the UI/UX design should be simplified and streamlined. This could involve reorganizing the navigation, using more intuitive icons and labels, and offering more detailed instructional materials for users who are not familiar with the platform.Another area for improvement is in data visualization. As the digital twin platform collects and processes large amounts of data, it can be challenging for users to glean insights andunderstand the data in a meaningful way. By improving data visualization tools, such as graphs, charts, and heat maps, designers and engineers could more easily identify patterns and trends in the data, leading to more informed decision-making and improved product performance.Finally, tool integration could be improved in order to streamline workflows and improve collaboration between different departments and teams. For example, integrating the digital twin platform with manufacturing and supply chain management tools could help designers and engineers more easily identify potential bottlenecks and optimize product design for production. Similarly, integrating the platform with customer relationship management tools could help companies better understand customer needs and preferences, leading to more tailored and successful product offerings.As these improvements are made to the digital twin platform, it has the potential to become an even more powerful tool for driving innovation and improving product performance across a wide range of industries. By simplifying the UI/UX design, improving data visualization tools, and integrating with other critical tools and systems, the platform can help businesses take a more data-driven approach to product design and development, resulting in greater success and customer satisfaction.Additionally, improved digital twin platforms can also have significant impacts on the maintenance and predictive maintenance of products, particularly in industries such as manufacturing, aviation, and energy. By generating accuraterepresentations of products and their operating environments, digital twins can help identify potential issues and allowfor proactive maintenance, reducing downtime and increasing efficiency.Moreover, the integration of artificial intelligence (AI) and machine learning algorithms can further enhance the capabilities of digital twins. These technologies can be utilized to analyze data from a range of sources, including IoT sensors and historical data, to provide insights into product behavior and potential future performance. This information can then be used to optimize product design and identify potential areas for improvement.In conclusion, the development of digital twin platforms has the potential to revolutionize product design and development processes, enabling businesses to take a more data-driven approach to innovation. As these platforms continue to evolve and improve, we can expect to see even greater benefits in terms of product performance, maintenance, and customer satisfaction.总之,数字孪生平台的发展具有革命性的潜力,可以使企业采用更加数据驱动的创新方法,从而革新产品设计和开发过程。

小学上册英语第二单元期末试卷英语试题一、综合题(本题有100小题,每小题1分,共100分.每小题不选、错误,均不给分)1.The _______ (Plymouth Rock) is a symbol of the Pilgrims’ landing in America.2.Which animal lives in water?A. HorseB. FishC. CatD. Dog3. A __________ is a common example of a base.4.The __________ is the amount of space occupied by a substance.5.Chemistry can help us understand the world around us and make _____.6.The ________ is a great pet for kids.7.My _____ (玩具熊) is very cuddly.8. A _______ can help to visualize the motion of an object.9.My favorite childhood memory is playing ________ (游戏) with my cousins during summer vacations.10.I love to go ______ during the holidays.11.What is the name of the famous movie about a sinking ship?A. TitanicB. PoseidonC. The Perfect StormD. Master and CommanderA12.I saw a rainbow after the ______ (雨). It was very ______ (绚丽).13.What is the capital of Italy?A. FlorenceB. RomeC. VeniceD. MilanB14.We are going to the ___. (fair) this weekend.15.What is the capital of Egypt?A. CairoB. AlexandriaC. GizaD. LuxorA16.The chemical symbol for titanium is _______.17.The ________ (果蔬) are healthy snacks.18.My friend has a unique __________ (见解) on life.19.I can ___ (swing) high on the swing set.20.The _____ (绿色倡导) aims to protect and restore habitats.21.What is the opposite of dark?A. LightB. BrightC. ClearD. All of the aboveD22.I love to take walks when the weather is __________. (宜人的)23.The ______ (雨水收集) can benefit garden plants.24.Light from the sun takes about eight minutes to reach ______.25.Where does the President of the United States live?A. The White HouseB. The CapitolC. The PentagonD. The EmbassyA26.What is the name of the famous river in Egypt?A. AmazonB. NileC. MississippiD. YangtzeB27.What is a common pet?A. ElephantB. DogC. LionD. Bear28.He is a writer, ______ (他是一名作家), who writes novels.29.What is 5 x 5?A. 20B. 25C. 30D. 35B30.What is the name of the famous toy building blocks?A. K'NexB. Lincoln LogsC. LegoD. Tinkertoy31.In chemical terms, a "reactant" is a substance that undergoes a _____ in a chemical reaction.32.The __________ is a large area of wetlands.33.Saturn's rings are made up of countless _______.34.The __________ is a region known for its festivals.35.We have a ______ (愉快的) time while traveling.36.Can we play with our __________ (玩具名) outside?37.What is the common name for a four-legged pet animal?A. FelineB. CanineC. PetD. AnimalD38.What is the name of the famous fairy tale character who had a long braid?A. Sleeping BeautyB. RapunzelC. CinderellaD. Snow White39.What do you call the process of water turning into vapor?A. CondensationB. EvaporationC. PrecipitationD. SublimationB40.Metallic elements are usually good ______ of heat.41. have bushy ______ (尾巴). Squirrel42.What do you wear on your feet?A. ShirtB. PantsC. ShoesD. HatC43.What color do you get when you mix red and blue?A. GreenB. PurpleC. OrangeD. BrownB44. A _______ (青蛙) lives in wet areas.45.What do we call the main character in a story?A. AntagonistB. ProtagonistC. Supporting CharacterD. Minor CharacterB46.What do we call a person who studies the earth?A. GeologistB. BiologistC. ChemistD. AstronomerA47.What is the term for the outer layer of the Earth?A. CoreB. MantleC. CrustD. SurfaceC48.zero emission) goal seeks to eliminate pollution sources. The ____49.ts are adapted to _____ (极端) environments. Some pla50.The _____ can affect the orbits of nearby planets.51.What is the name of the holiday celebrated in October?A. ThanksgivingB. HalloweenC. ChristmasD. New YearB52.My sister is _______ (在拍照).53.I can play creatively with my ________ (玩具名称).54.Daffodils are bright _______ that bloom in spring.55.ts grow best in _____ (湿润) soil. Some pla56.The ______ (植物的颜色) can attract different pollinators.57.The ocean is ___ (deep).58.The ancient Egyptians used ________ (象形文字) for communication.59.What do we call the time when leaves change color in fall?A. BloomB. HarvestC. AutumnD. WinterC60.The first successful heart transplant was performed in ______ (20世纪).61.What is the main ingredient in chocolate?A. CocoaB. VanillaC. SugarD. MilkA62. A ______ is an animal that can swim very fast.63.My mom makes the best _______ (食物). 我爱吃她做的 _______ (食物).64.I can ________ (做) math problems.65.My cousin is very __________ (活跃的) in school clubs.66. A __________ can help scientists learn about past climates.67.What is the capital of the Dominican Republic?A. Santo DomingoB. SantiagoC. La RomanaD. Puerto PlataA68.What do we call a small, round candy?A. ChocolateB. LollipopC. GumdropD. Jellybean69.My uncle is a ______. He loves to travel.70.Which of these animals lives in a den?A. BearB. EagleC. FishD. Frog71.What do we call a baby goat?A. KidB. LambC. PuppyD. Calf72.How many days are there in a week?A. 5B. 6C. 7D. 873.What is the opposite of "fast"?A. QuickB. SlowC. SwiftD. RapidB74.Which ocean is the largest?A. AtlanticB. IndianC. ArcticD. Pacific75.What do you call the process of a caterpillar turning into a butterfly?A. MetamorphosisB. TransformationC. EvolutionD. DevelopmentA76.Did you see a _______ (小海狸) building a dam?77.I can ______ (进行) experiments in the lab.78.The panda is known for eating _______ (竹子).79.The chemical symbol for tungsten is __________.80.My ______ is a scientist who studies plants.81.I enj oy learning about animals and their habitats. It’s important to protect our______ (环境).82.The toy chest is full of ______.83.The __________ (城市设施) support the community.84. A _______ is a process that requires careful measurement.85.How do you say "hello" in Spanish?A. BonjourB. HalloC. HolaD. CiaoC86.What do you call a person who collects stamps?A. PhilatelistB. NumismatistC. CollectorD. ArchivistA87.The ________ was a significant event in the history of civil rights.88.My friend is very __________ (有耐心的) with younger kids.89.What is the opposite of "hot"?A. ColdB. WarmC. CoolD. Spicy90.The __________ is a famous structure in India. (泰姬陵)91.My aunt enjoys helping at the ____ (community center).92.The ________ was a series of conflicts fought for independence in Latin America.93.What is the capital of Argentina?A. Buenos AiresB. SantiagoC. LimaD. BogotáA94.What do you call the time it takes for the Earth to rotate once?A. MonthB. YearC. DayD. Hour95.I see a __ in the field. (horse)96. A solid has a definite shape and ____.97.Sound waves can be ______ by different materials.98.Hydrochloric acid is a strong ______.99.The ______ has a strong sense of smell.100.The _______ of light can be tested by examining its reflection.。

2023年河北省教师招聘考试《中学英语》高频错题及答案学校:________ 班级:________ 姓名:________ 考号:________一、单选题(35题)1.To air these predicaments is notanti-medical spleen--a churlish ___________ against medicine for its victories,but simply to face the growing reality of medical power not exactly without responsibilitybut with dissolving goal.A.reprisalB.revengeC.retributionD.rapprochements2.Even when__________to such tough living conditions, the children would never have anycomplaint.A.exposingB.exposedC.exposeD.to expose3.The biggest whale is ______ blue whale, which grows to be about 29 meters long—the height of _______ 9-story building.A.the; theB.a; aC.a; theD.the; a4.Some experts think reading is the fundamental skill upon______ school education depends.A.ItB.thatC.whoseD.which5."Most dog owners are convinced that their four-legged friends know exactly what they mean when they use certain words like sit,stay or treat."The function of the underlined part is______.A.a subject clauseB.an adverbial clauseC.an object clauseD.an attributive clause6.Even when __________to such tough living conditions, the children would never have any complaint.A.exposingB.exposeDC.exposeD.to expose7.We ′ll get you informed of the meeting the moment the manager becomes ___________A.accessibleefulC.availableD.convenient8._____ that my head had cleared, mybrain was also beginning to work much better.A.ForB.NowC.SinceD.Despite9.The senior citizen would have beenkilled ______ the timely arrival of the rescue team.A.except forB.but forC.besidesD.except10."The key to__________the medical problems is health care reform," said the minister.A.solveB.solvingC.being solvedD.be solved11.The house was very quiet, ______ as itwas on the side of a mountain.A.isolatedB.isolatingC.being isolatedD.having been isolated12.Can you tell me ________?A.who is that gentlemanB.that gentleman is whoC.who that gentleman isD.whom is that gentleman13.The underlined letters in the following words have the same sound except________.A.whatB.whoC.whichD.when14.She has many good friends, _________ are really kind to her and her parents.A.most of themB.and most of whomC.but most of whomD.most of whom15.Children are very curious ______.A.at heartB.on purposeC.in personD.by nature16.Anne couldn′t concentrate ______ whatshe was doing while her family were watching TV.A.toB.onC.forD.in17.But not all pretended deeds have to fall short of their normal function in order to____their communication purpose.A.serveB.succeedpleteD.accomplish18.I accidentally found a photo that mymother took of ______ when I was a student.A.herB.hersC.meD.mine19.A person′s calorie requirements vary______ his life.A.acrossB.throughoutC.overD.within20.It is reported in today′s newspaper thatwhoever helps to catch the robber will be offered a(n) ___________ of $10,000.A.awardB.rewardC.allowanceD.prize21.Nowadays with the development of science, more and more new technology__________to the fields of IT.A.has introducedB.was introducedC.will introduceD.is being introduced22.Leave the reference books behind,___________ you won′t able to think independently.A.orB.andC.soD.but23.We are going to the zoo by bus on Tuesday afternoon. Will you go with us__________ meet us thereA.whenB.orC.andD.then24._______ was a protest movement by American youth that arose in the late 1960s.A.Free Speech MovementB.The Women's MovementC.Anti-War MovementD.Counter Culture Movement25.What does the underlined word trivial"in Paragraph 3 mean?A.IncredibleB.Of little significanceC.RationalD.Of great consequence26.When it was time for our ticket to be______, I couldn′t find mine.A.controlledB.boughtC.checkedD.overlooked27.I don′t mind ______ the decision as longas it is not too late.A.you to delay makingB.your delaying makingC.your delaying to makeD.you delay to make28.The local authorities realized the need to make?for elderly people in their housing programmes.A.preparationB.requirementC.specificationD.provision29.Your hair wants______. You′d better haveit done tomorrow.A.cutB.to cutC.cuttingD.being cut30.Encounter Environmental Tours offerstrips to some of the most beautiful and isolated wildernesses in the world _____all the comforts of five-star accommodations.A.bothB.plusC.thoughD.together31.I've tried very" hard to improve my English. But by no means__________with my progress.A.the teacher is not satisfiedB.is the teacher not satisfiedC.the teacher is satisfiedD.is the teacher satisfied32.Which of the following refers to the study of meaning in abstraction?A.PhoneticsB.PragmaticsC.SemanticsD.Sociolinguistics33.Which of the following clusters of words is an example of alliteration?A.A weak seatB.Safe and soundC.Knock and kickD.Coat and boat34.Until then, his family ____ from him for six months.A.didn't hearB.hasn't been hearingC.hasn' t heardD.hadn' t heard35.Digital content is so easily accessible nowadays that young people may just ________ books to be free and are not ready to pay for it.A.suggestB.assumeC.approveD.demand参考答案1.A考查名词辨析。

小学上册英语第二单元自测题英语试题一、综合题(本题有100小题,每小题1分,共100分.每小题不选、错误,均不给分)1.The sunflower follows the _______ throughout the day.2.How many letters are in the English alphabet?A. 24B. 25C. 26D. 27C 263.The cheetah's speed is an evolutionary adaptation for catching fast________________ (猎物).4.I saw a ________ in the grass today.5. A __________ is a mixture where one substance is dissolved in another.6.What is the name of the animal that can hop?A. DogB. FrogC. KangarooD. Cat7.The ancient Greeks believed in the power of ______ (智慧).8.What is the capital of Spain?A. BarcelonaB. MadridC. ValenciaD. SevilleB9.The Andromeda galaxy is on a collision course with the ______.10.What is the name of the popular animated series about a family of superheroes?A. The SimpsonsB. The IncrediblesC. Family GuyD. Bob's BurgersB11.__________ are used in agriculture for crop protection.12.What is the common name for a four-legged pet animal?A. FelineB. CanineC. PetD. AnimalD13.What is the main topic of a story called?A. SettingB. PlotC. ThemeD. CharacterC14.The _______ (The Civil Rights Movement) sought equality for African Americans.15.Air is a mixture of several different ______.16.The Caribbean is known for its __________.17.What is the term for a person who studies the oceans?A. OceanographerB. Marine BiologistC. GeologistD. EnvironmentalistA18.The ice cream is _____ melting. (slowly)19.What is the name of the famous mountain in Africa?A. KilimanjaroB. Mount KenyaC. Atlas MountainsD. Rwenzori Mountains20.The chemical symbol for barium is _______.21. A turtle hides in its _______ when it feels threatened or scared.22.The ________ is an important geographical feature of the Earth.23.I love to watch the _______ (海洋生物) at the aquarium.24.What is the capital city of Croatia?A. ZagrebB. SplitC. DubrovnikD. Rijeka25.The _____ (蜗牛) moves slowly but surely.26.What is the name of the famous ship that sank in 1912?A. TitanicB. BritannicC. LusitaniaD. Queen Mary27.The _______ is the unit of force.28.What is the capital of the Solomon Islands?A. HoniaraB. GizoC. AukiD. LataA29.The __________ is a region known for its wine production. (加利福尼亚)30.What is the name of the famous American author known for his horror stories?A. Edgar Allan PoeB. Stephen KingC. H.P. LovecraftD. Ray BradburyA Edgar Allan Poe31.What do we call a book that tells a true story?A. FictionB. NovelC. BiographyD. Fantasy32.The process of breaking down food in our bodies is called ______.33.Vines can _____ (攀爬) up walls and fences.34. A chemical formula shows the types and numbers of ______ in a compound.35.What is the name of the famous detective created by Arthur Conan Doyle?A. Hercule PoirotB. Sherlock HolmesC. Sam SpadeD. Miss MarpleB36.I love _____ (to draw/to sleep).37.I have a pet ___ (fish).38.The process of sublimation occurs from solid directly to ______.39.The _______ is the part of an atom that contains protons and neutrons.40.What is the name of the fairy in Peter Pan?A. CinderellaB. Tinker BellC. Snow WhiteD. ArielB41.The _____ (泡泡) maker is so cool.42.听一听,圈出与你听到的句子相符的图片。

两头四手四足的怪人阅读题The problem of the "two-headed, four-armed, and four-legged monster" presents an intriguing scenario that challenges our understanding of biology and the limits of the human form. From a scientific perspective, such a creature would defy the laws of nature as we currently know them. However, if we suspend our disbelief and approach the problem from a fictional standpoint, we can explore the potential implications and consequences of such a creature existing.Firstly, let us consider the physical attributes ofthis monster. With two heads, it would possess a unique sensory experience, potentially allowing for a wider field of vision and the ability to process information from different perspectives simultaneously. However, this could also lead to confusion and conflicting thoughts, as each head may have its own consciousness and opinions. The coordination required for the four arms and four legs to work together harmoniously would be a challenge, but ifachieved, it could result in exceptional dexterity and mobility.From a psychological standpoint, the monster's dual consciousness would raise questions about its identity and sense of self. How would the two heads interact with each other? Would they have distinct personalities or share a single consciousness? These questions delve into the complexities of individuality and the nature of consciousness itself. Additionally, the monster's appearance would undoubtedly elicit strong reactions from others, potentially leading to feelings of isolation, rejection, or even fascination.The existence of such a creature would undoubtedly have profound social implications. Humans tend to fear what they do not understand, and the monster's appearance wouldlikely provoke a range of reactions, from awe and curiosity to fear and prejudice. Society would have to grapple with issues of acceptance, equality, and the rights of this unique being. Would the monster be treated as an outcast or as an equal member of society? Would it be subject toscientific scrutiny or exploitation?Furthermore, the monster's presence would challenge our traditional notions of gender and sexuality. With two heads, each potentially possessing its own gender identity or sexual orientation, the concept of binary gender would no longer apply. This could lead to a more inclusive and diverse understanding of human sexuality, as society would be forced to confront the complexities and fluidity of gender and sexual orientation.In conclusion, the problem of the "two-headed, four-armed, and four-legged monster" presents a fascinating thought experiment that pushes the boundaries of our understanding of biology, psychology, and society. While such a creature would defy the laws of nature as we know them, exploring its implications from a fictionalstandpoint allows us to reflect on the complexities of identity, consciousness, and societal norms. It challenges us to question our assumptions and biases and consider the potential for a more inclusive and accepting society.。

My Furry Companion: A Loyal Little DogIn the vast expanse of my life, there exists a furry, four-legged creature that has stolen my heart and become my closest friend. She is my adorable little dog, a bundle of joy and loyalty that brightens my days and warms my heart.Named "Bella," she is a ball of energy and affection, always ready to greet me with a wagging tail and a pair of sparkling eyes. Her coat is a lush blend of brown and white, soft to the touch and a testament to her playful nature.Her ears, always alert, twitch at every sound, her nose sniffing eagerly for new adventures.Bella's loyalty is unequaled. No matter how busy I amor how long I've been away, she always greets me with the same enthusiasm and affection. Her presence is a constant reminder of the unconditional love that dogs offer, a love that knows no bounds and asks for nothing in return.Our daily routine is filled with fun and games. Whether it's chasing squirrels in the park, playing fetch with her favorite ball, or simply cuddling on the couch, Bella makesevery moment a cherished one. Her antics often leave me laughing, and her antics never fail to brighten my mood.Beyond the fun and games, Bella has also taught me valuable lessons about companionship and loyalty. She has shown me that true friends are there for you through thick and thin, offering companionship when you need it most. Her dedication and loyalty have instilled in me a deeper appreciation for the meaningful relationships in my life. Moreover, Bella's presence has brought a sense of peace and comfort to my home. Her loyal nature and protective instincts make her a guardian of our space, always alert and ready to defend us from any perceived threats. Her calming presence during stressful times has been a source of solace for me, reminding me to stay calm and composed in the face of challenges.In conclusion, Bella is not just my pet; she is my best friend, my constant companion, and a source of unending joy and comfort. She has enriched my life with her love and loyalty, and I am grateful for every moment we share together. As I look ahead to the future, I know that Bellawill continue to be a cherished part of my life, bringing happiness and warmth to every day.**我的动物朋友小狗**在我生活的广阔天地中,有一只毛茸茸的四足生物偷走了我的心,成为了我最亲密的朋友。
青蛙从小蝌蚪长成青蛙的过程英语作文全文共6篇示例,供读者参考篇1The Amazing Life of a Frog!Hi, my name is Emily and I'm going to tell you all about the incredible life of a frog! Did you know that frogs don't start out looking like the frogs we all know? No way! They begin their lives looking like little fish with a big head and a long, wiggly tail. Isn't that crazy?These little creatures are called tadpoles, and they are actually baby frogs! When a mommy frog lays her eggs in the water, that's when the journey of the tadpoles begins. The eggs hatch and out comes lots of tiny, black tadpoles. They kind of look like little raisins swimming around!For the first few weeks, the tadpoles just eat and eat and eat. They love munching on things like algae and other tiny plants in the water. As they eat, they grow bigger and bigger. But they still just look like little fish babies at this point. No legs or anything!After a few weeks of being little eating machines, the tadpoles start to change. First, they grow some teeny tiny back legs! The legs start off really small and look almost like little stumps on their bodies. But soon, the legs get bigger and stronger. That's when the front legs start to grow too! Awesome, right?As the legs are growing, the tadpoles are also growing lungs inside their bodies. See, when the tadpoles hatch, they can only breathe underwater through gills. But once they become frogs, they have to breathe air with lungs like we do. So cool!While all of these changes are happening, the tadpoles are also getting ready to look like frogs. Their big round heads start to become more pointy like a frog's head. Their long tails also get shorter and shorter until they're just a little stumpy tail.After a few months of all these crazy changes, the tadpoles finally look just like little frogs! Their tails are gone, they have four strong legs, lungs to breathe air, and a froggy face. They are no longer tadpoles - they are officially frogs!But don't think the changes stop there. Even though the new frogs can hop around on land and eat bugs like adult frogs, they still have to keep growing and changing. Their bodies get bigger and bigger until they become big, full-grown frogs.It's absolutely amazing to think that these hopping, croaking frogs we see started out life as tiny, fishy tadpoles. What an incredible transformation! From a little egg, to a swimmer with a tail, to a four-legged amphibian ready to explore the world. The life of a frog is one awesome adventure.So next time you see a frog hopping by, remember their amazing journey from egg, to tadpole, to grownup frog. They sure did go through a lot of changes to get where they are! Frogs are living proof that amazing changes can happen when you start out life as something completely different. Thanks for reading all about my favorite animal!篇2The Wonderful Journey of a Tadpole Becoming a FrogDid you know that frogs don't start out looking like frogs? They actually go through an amazing transformation from a tiny egg to a fishy-looking tadpole and then finally into an adult frog. It's an incredible journey, and I'm going to tell you all about it!It all begins when a male frog fertilizes the eggs laid by a female frog. These eggs are usually laid in water, like a pond or a stream. The eggs look like little jelly-like balls clumped together. After a few days, the eggs hatch into tiny tadpoles.Tadpoles are really cool-looking creatures! They have a long, oval-shaped body with a big head and a long tail. They don't have any legs at all, just a tail to help them swim around. Tadpoles also have gills on the sides of their heads, just like fish do. This is because they live underwater and breathe the oxygen that's dissolved in the water.When they first hatch, tadpoles are really tiny – smaller than your baby fingernail! But they start growing and eating a lot. Tadpoles mostly eat plants and algae that grow in the water. Their mouths are designed to scrape off little bits of these tasty greens.As the tadpoles grow bigger, their bodies start to change. After a few weeks, you can see their back legs beginning to sprout out from their bodies. Then, a little while later, their front legs start to appear too! It's almost like they're turning into little frogs right before your eyes.But the changes don't stop there. The tadpoles also start developing lungs so they can breathe air. Their gills slowly disappear, and their tails get smaller and smaller until they're completely gone. By this point, they look just like tiny frogs with all four legs and no tail.This whole process of turning from a tadpole into a frog is called metamorphosis. It's truly amazing how much these little creatures change and transform during their life cycle.Once they've completed their metamorphosis, the young frogs are ready to leave the water and explore the land. They'll spend their days hopping around, catching insects and bugs to eat with their long, sticky tongues.Different types of frogs go through this metamorphosis process in slightly different ways. Some tadpoles take a few months to turn into frogs, while others might take up to two years! It all depends on the type of frog and the environment they live in.Isn't it just incredible to think about how these little creatures start out as tiny eggs, then become fish-like tadpoles, and finally transform into hopping, croaking frogs? Nature is truly amazing, and the life cycle of frogs is one of the most fascinating examples of it.The next time you see a frog hopping around, remember the incredible journey it went through to get there. It started out as a tiny egg, then became a swimming tadpole, and finally emerged as a four-legged frog after an amazing metamorphosis. Whoknows, you might even be lucky enough to spot some tadpoles in a pond and watch them changing right before your eyes!篇3How a Tiny Tadpole Turns into a Hopping FrogHi, my name is Jamie and I'm going to tell you all about how frogs start out as little swimming tadpoles before turning into hopping, croaking frogs! It's one of the coolest things in nature.It all starts when a male and female frog mate. The female lays hundreds of tiny eggs in the water. The eggs look like little black balls all clustered together in a jelly-like blob. We call these eggs "frog spawn." After a few days, the eggs hatch and out wriggles a tiny tadpole!A tadpole doesn't look much like a frog at all. It has a big head and a long tail, but no arms or legs. It breathes through gills, just like a fish! The newly hatched tadpoles are only about 1/4 inch long. They use their tails to wiggle through the water as they search for their first meal of algae or plants to nibble on.Over the next few weeks, the tadpoles grow bigger and bigger as they eat more algae, plants, and even dead insects that fall into the water. When they are just a couple weeks old, youcan already see their mouths formed with tiny black teeth to help them chew up their food better.After about 6-9 weeks, the tadpole's body starts changing. Small bumps begin forming on the sides of its body. These bumps will eventually grow into back legs! How cool is that? The tadpole still looks mostly like a tadpole at this stage, but now it has teeny tiny hind legs sprouting out. We call this stage a "tad-pole" because it's not quite a tadpole anymore but not yet a frog either!A couple weeks later, the front legs start to poke out from underneath the tad-pole's head. It also begins growing air sacs inside its body, which will become its new lungs for breathing air instead of water when it becomes an adult frog. During this stage, the tadpole is very hungry and eats a lot to fuel all the big changes happening to its body.Next, the tad-pole's tail begins shrinking and its body becomes less round as its back legs grow bigger. Its head also becomes more frog-like in shape. At around 12-16 weeks old, the tadpole has turned into a little froglet! It can now hop around on land as well as swim in the water using its strong back legs. The froglet's front legs are still small but getting bigger every day.One of the final changes is that the froglet stops using its gills to breathe water, and instead starts taking breaths of air using its new lungs. Its tail also completely disappears by this point. After 2-3 more weeks, the froglet has morphed into afull-grown adult frog!The amazing metamorphosis from tadpole to frog is complete. The new frog hops off to live the rest of its life on both land and in the water. The female frogs will one day lay eggs of their own and start the whole cycle over again.Watching this incredible transformation never fails to blow my mind. Starting out as a tiny fishy tadpole and turningstep-by-step into a hopping, croaking, lung-breathing frog is one of the coolest things in nature. I feel so lucky to be able to learn about and witness these amazing life cycles happening right here in my neighborhood pond!篇4The Amazing Life of a FrogHi friends! Today I want to tell you all about the incredible life of a frog. It's one of the coolest things in nature. Frogs start out life looking totally different from how they end up. They gothrough an amazing transformation called metamorphosis. Let me tell you all about it!It all begins when a mommy frog lays lots and lots of tiny eggs in the water. The eggs look kind of like little black balls all clustered together. While the eggs are in the water, they start developing into tadpoles inside. After a little while, the tadpoles hatch out of their eggs.When they first hatch, the tadpoles are really really tiny. They look more like little black wriggling fish than frogs. They have a big head and a long tail, but no arms or legs at all. The tadpoles use their tail to swim around in the water to find things to eat like algae and other tiny plants.As the tadpoles get bigger, you start to see some changes happening to their bodies. Little bumps start to grow where their back legs will sprout out. These bumps get bigger and bigger until one day little back legs pop out! How cool is that? The tadpoles can use these new legs to push off from rocks and swim faster.Next, the tadpoles grow a pair of front legs too. By this time, their tail is getting smaller and smaller as their body starts changing shape to look more like a frog. You can see their eyesgetting bigger and their mouth getting wider too. Their body becomes more rounded like a frog's.When the tadpole is just about done turning into a frog, it's able to breathe through both gills like a fish and lungs like a frog. This lets it swim in the water but also spend time on land. The tadpole's tail gets tinier and tinier until one day it falls off completely!And just like that, the tadpole has morphed into a tiny little froglet! It's fully grown its four legs and has lost its tail. It looks just like a miniature version of an adult frog now, but still really really small. The froglet climbs out of the water and gets used to hopping around on land.Over the next few months, the little froglet keeps growing bigger and bigger. Its back legs get stronger and more muscular for hopping and jumping. Its front legs grow too so it can climb and catch bugs and flies to eat. Its body and head get larger, its eyes get bigger, and its sticky tongue gets longer to catch prey.Before you know it, the froglet has grown into an adult frog! Depending on the type of frog, it might be green, brown, red, yellow or all sorts of cool colors. Some frogs stay small while others get really huge. But they all started out life as a tiny littletadpole before metamorphosing into their grown-up froggy form.Isn't that just the neatest thing? Frogs go through one of the most amazing life cycles in nature. They totally transform their body and how they live, going from a fish-like tadpole swimming in water to an air-breathing, hopping, bug-catching frog living on land. What an incredible change!I think frogs are so awesome. Their metamorphosis from tadpole to frog is like a tiny miracle happening right before our eyes. Next time you see a little tadpole wriggling in a pond, just think about the adventure it's about to go through to become a frog. Nature is amazing!篇5The Incredible Journey of a Tadpole Becoming a FrogHi everyone! My name is Emily and I'm going to tell you all about the amazing adventure that tadpoles go through to become frogs. It's one of the coolest things in nature!It all starts with frog eggs. Mother frogs lay lots and lots of tiny eggs in the water. The eggs look like little black balls surrounded by a jelly-like covering. After a few days, you can seethe teeny tiny tadpoles wiggling around inside the eggs. How crazy is that?Once the tadpoles hatch out of their eggs, they are just these tiny little wriggly things in the water. They have a big head and a long tail, but no arms or legs yet. At this stage, they mostly just float around and eat tiny pieces of plants and algae in the water using their little mouths.As the tadpoles get a bit bigger, they start growing some really cool things. First, they get these feathery gills on the sides of their heads that they use to breathe underwater, just like fish! They also develop a long coiled intestine inside their body to digest the plants they eat.After a few more weeks, the tadpoles start looking a little different. You can see their mouth and jawline getting bigger and stronger so they can eat more plants and chomp on things. Their tail also gets longer and stronger so they can swim around better.This is where the really wild changes start happening! The tadpoles start growing teeny tiny legs! First the back legs appear as little stumps, then the front legs come out next to their head. It's so funny looking, like a little frog body with a big tadpole head and tail.As the legs get bigger, the tail starts shrinking and the tadpole head becomes more frog-like. The intestines shorten up and change shape too so the frog can start eating insects and meat instead of just plants. The gills also disappear and lungs develop so the frog can breathe air!Finally, after a couple more weeks of crazy transformations, the tail is completely gone and you're left with a perfect little frog! The froglets then leave the water and venture out onto land to start their new life as adult frogs.Isn't that one of the neatest things you've ever heard? A tiny tadpole undergoes an insane metamorphosis, sprouting legs, losing its tail, and totally changing its body and insides to go from a water creature to a land creature. It's like several different animals combined into one life cycle!I think the coolest part is imagining how strange it would feel to slowly grow legs and lungs and go from swimming to hopping around. Or having a long tail one day and then no tail the next! Nature is awesome.I really want to go find some frog eggs near a pond and watch the whole process myself this spring. Maybe you can too! Just be sure not to disturb the eggs or tadpoles too much.They're working hard on their incredible transformations. Let me know if you get to see any froglets hopping around!篇6The Amazing Life of a FrogHi, my name is Jamie and I'm going to tell you all about the really cool life of a frog! Frogs are amazing animals that go through an incredible change called metamorphosis as they grow up. When they are first born, they don't even look like frogs at all. Instead, they hatch from little eggs laid in the water into tiny tadpoles!It all starts when a male and female frog find each other in a pond or stream. The male frog will climb onto the female's back and hugs her tightly in something called amplexus. This helps the female push out her eggs into the water as the male releases his sperm to fertilize them. Some frogs lay a huge bunch of eggs all clumped together in a jelly-like mass, while others lay their eggs in long strings. Those little black eggs are actually thousands of teeny tiny frog babies just waiting to hatch!After a few days or weeks, the eggs start wiggling and tiny tadpoles emerge. Tadpoles look more like little fish than frogs. They have a oval body, a long tail to swim with, and breathethrough feathery gills on their heads. Since they can't leave the water yet, the tadpoles gather together in groups and mostly just eat any plants or algae growing in the pond. They also have to watch out for being eaten by big fish, birds, and other animals!As they get bigger over the next few months, the tadpoles start to slowly transform into froglets. Little back legs start growing first, then front legs pop out. The gills disappear as lungs develop so they can breathe air. The long tail gets smaller and smaller until it's gone. The oval body becomes morefrog-shaped, with a rounder head and bigger eyes on top. Soon, all the features of an adult frog have formed - webbed feet for swimming, a long sticky tongue for catching bugs, big bulging eyes, and a slimy skin covered in mucus.Now the metamorphosis is complete and the tiny froglet can finally leave the water as a perfect little frog! Some types of frogs stay in the water as tadpoles for just a couple months, while others take over a year to finish changing. The longest tadpole stage is the bullfrog, which doesn't become a froglet until。
2023-2024学年河南省顶尖联盟高一上学期期中检测英语试题1. Where does the conversation take place?A.In a shop. B.At a theater. C.At a restaurant.2. When can the man see the doctor today?A.At 2:30. B.At 10:15. C.At 11:15.3. What are the speakers talking about?A.Courses. B.Universities. C.Countries.4. What does the man want to do?A.Go to school. B.Have a meal. C.Do cooking.5. What might the woman do next?A.Have her clothes cleaned.B.Go shopping with the man.C.Invite the man to eat out.听下面一段较长对话,回答以下小题。
6. What are the speakers doing?A.Having a meeting. B.Talking about a friend. C.Speaking on thetelephone.7. What is Mr. Green doing?A.He is away on business. B.He is travelling abroad. C.He is working in theoffice.听下面一段较长对话,回答以下小题。
8. What is the probable relationship between the speakers?A.Teacher and student. B.Coach and player. C.Policeman and driver. 9. What did the woman do just now?A.She asked for help. B.She made a mistake. C.She knocked another car.10. What happens at the end of the conversation?A.The woman is punished.B.The man says sorry to the woman.C.The car is driven away by the man.听下面一段较长对话,回答以下小题。

五年级下册青蛙的演变过程英语作文全文共3篇示例,供读者参考篇1The Amazing Life of FrogsFrogs are one of the coolest animals in the world! They start out as little eggs in the water, and then go through an incredible transformation called metamorphosis to become the hopping, croaking frogs we know and love. Let me tell you all about the amazing life cycle of frogs!It all begins when a male and female frog mate. The female lays hundreds of tiny eggs in the water, like in a pond or a lake. The eggs look like little squishy balls clustered together. They are covered in a jelly-like substance that protects them. After a few days, the eggs hatch and tiny tadpoles emerge!Tadpoles don't look much like frogs at all. They have a big head and a long, oval-shaped body with a fin-like tail. They don't have any legs yet. Tadpoles breathe through feathery gills, just like fish do. They spend their days swimming around and eating things like algae, dead plant matter, and even tiny microscopic creatures in the water.As the tadpoles get bigger and bigger over the next few weeks, they start to change and develop in really cool ways. Slowly, they start growing legs! The back legs appear first as little stumps near the base of the tail. A couple weeks later, the front legs also start to bud out from underneath the tadpole's head.At the same time, the tadpole is also growing lungs and developing other organs that will allow it to live on land as an adult frog. Its tail also starts shrinking and its mouth and face gradually take on the wide shape of a frog's mouth.This is such an amazing transformation! The tadpole is literally turning into a frog before our eyes through metamorphosis. It's getting ready to leave its life in the water behind.Eventually, after a couple more weeks, the tadpole has four fully-formed legs and lungs to breathe air. Its tail has completely disappeared. The tadpole is no more - it has turned into a tiny froglet!The new little froglet climbs out of the water and begins living on land. At first it will hunt tiny insects and other bite-sized morsels around the pond or lake. As it grows bigger over the next year or two, it will venture farther away and its diet willchange to include worms, spiders, slugs, and whatever else looks tasty to a frog.Once the frog reaches adulthood and is fully grown, it may weigh just a few ounces but it can be over 6 inches long! Frogs come in all different shades of green, brown, red, and other colors with lots of neat patterns on their skin.Adult frogs have powerful hind legs that allow them to leap incredibly far to catch prey or escape predators. Their eyes are on top of their heads which gives them an almost 360 degree view. They catch food by flicking out their long, sticky tongues at lightning speed to snatch up bugs, worms, or whatever other snack is passing by. Adult frogs also use their deep, croaking calls to attract a mate when it is breeding season.Then the cycle starts all over again! A male and female frog will mate, the female will lay hundreds or thousands of eggs in the water, and a new generation of tadpoles will hatch to begin the amazing process of metamorphosis once more.Isn't the life of a frog incredible? I'm in awe of how they go through such a dramatic change from a tiny tadpole living in the water to a four-legged hopping frog living on land. Metamorphosis is one of the coolest things in nature! Frogs are living proof of how miraculous life on Earth can be.I hope you've enjoyed learning about the remarkable journey frogs take during their life cycle. From a jelly-coated egg, to a fishy tadpole, to a jumping amphibian - it's a fascinating transformation. The next time you see a frog, remember the long path it took to get there! These plucky little creatures are true champions of change and survival.篇2The Metamorphosis of FrogsFrogs are one of the most fascinating creatures on our planet! They start out as tiny little eggs in the water, and then go through an incredible transformation called metamorphosis to become the hopping amphibians we know and love. Let me take you through the amazing life cycle of these croaking critters.It all begins when a female frog lays hundreds or even thousands of tiny eggs in still or slow-moving water like ponds, lakes or streams. The male fertilizes the eggs on the outside as they are being laid. These little round eggs are enclosed in a jelly-like substance that protects them. Depending on the species and temperature of the water, the eggs will hatch anywhere from 3 days to 3 weeks later.When the eggs hatch, out wriggle tiny tadpoles! At this stage, they look nothing like frogs at all. Tadpoles are small, rounded organisms with a big head, no legs, and a long tail. They mostly just hang out in the water and feed on algae and decaying plant matter.As the tadpoles grow bigger over the next few weeks, you'll start to notice some incredible changes happening. Little legs begin sprouting near the base of the tail! The back legs come first, followed by the front legs a bit later. During this time, the tadpole is developing lungs so it can breathe air when it becomes a froglet.While the legs are forming, the tadpole's mouth starts changing shape too. Those tiny jaws grow bigger and develop teeth to help it eat bigger meals like insects and small fish. The intestines also change to support a new carnivorous diet as a frog. At the same time, eyes that were once on the sides of its head move to the top so they can see better above water.But the most mind-blowing part is still to come! As the tadpole prepares to leave the water, its tail starts being absorbed back into its body. Can you imagine if our legs grew first and then we had to wait for the rest of our body to catch up? That'skind of what happens with frogs - their legs develop and then their body reorganizes to support them.Finally, a few months after hatching from that tiny egg, the tadpole has fully transformed into a froglet - a tiny frog around 1-2 inches long. It can now live on land, breathe through lungs, eat insects and other prey, and hopefully avoid getting gobbled up by birds, snakes or other predators. The froglets continue growing for 2-4 years until they reach adult size, somewhere between 2-8 inches depending on the species.From a tiny egg encased in jelly, to a fish-like tadpole, to a four-legged hopping frog - it's one of the most amazing transformations in nature! The next time you see a frog, remember the long journey it took to get there, completely changing its body and how it survives along the way. Pretty cool, huh?Some frog species take this transformation even further by being able to regrow limbs, organs and other body parts if they get injured as adults. Scientists are hoping to learn from frogs on how to regrow human tissues and organs someday. Just another reason why these little hoppers are such incredible creatures!So there you have it, the epic life story of our amphibian friends from egg to tadpole to froglet to full-grown frog. Whowould have thought that slimy little eggs could turn into such athletic jumpers and talented insect-catchers? Nature really is amazing. I hope you've enjoyed learning about the metamorphosis of frogs - I know I have!篇3The Amazing Life Cycle of FrogsHi everyone! Today I'm going to tell you all about the incredible life journey that frogs go through. From a tiny egg to a hopping amphibian, it's one of the coolest transformations in nature. Get ready to be amazed!It all starts with the eggs. Mother frogs lay hundreds or even thousands of tiny eggs in the water. The eggs look like little black dots surrounded by a jelly-like substance. This protects the eggs and keeps them together in a cluster. Pretty cool, right?After a few days of being underwater, the eggs hatch and enter the next stage - the tadpole stage! Tadpoles are amazing little creatures. They have a big head, a long tail, and they breathe through gills just like fish do. But the really wild part? They don't have any legs yet!As tadpoles, they just sort of wiggle around in the water eating tiny plants and algae. Can you imagine not having anylegs? It must be so hard to get around! But don't worry, their legs are on the way.Over the next few weeks, the tadpoles start growing back legs first. Yep, that's right - they sprout their back legs before their front ones! They use these legs to push off from surfaces and swim faster. During this time, their front legs also start to bud out from their bodies. So cool!While their legs are growing, the tadpoles are also developing lungs so they can breathe air. Their cute little tails also start shrinking because they won't need them once they become adult frogs. It's such a crazy transformation!Finally, after a couple more weeks as a "froglet" with both arms and legs, their tails completely disappear. Their gills close up, and they can now breathe completely through their new lungs. They are officially frogs!Young frogs spend a lot of time in the water at first, sticking to the shallow areas. As they get bigger and stronger, they start venturing onto land more. Adult frogs are so awesome - they can live on both land and water. Talk about having the best of both worlds!Different frog species go through this metamorphosis at different speeds. Some tadpoles transform in just a couple of weeks while others take over a year! No matter how fast, it's an absolutely wild cycle of events.From a tiny black egg to a fishy tadpole to a leggy froglet and finally a hopping frog - each stage is more amazing than the last. Frogs are true masters of transformation. Their life cycle teaches us that even the smallest creatures can overcome huge changes and go through an epic journey.The next time you see a frog, remember everything it went through to get to that point. Those little hoppers are living proof that with time and persistence, we can all transform into our best selves, just like they did! What an inspiration frogs are.Thanks for reading, and I hope you locals think frogs are just as endlessly fascinating as I do after learning about their crazy life cycle. The natural world is full of mysteries and wonders, and the metamorphosis of frogs is definitely one of the coolest! See ya later, frog lovers!。


四足行走小车的设计摘要四足行走小车是当今足式机械研究发展的一个分支,因其在载重、稳定性方面比两足好,在结构方面比六足、八足简单,所以受到众多海内外科研人员的关注。
四足行走小车往大的方面可以应用到星球探索、工厂生产线以及战场输送物资等;往小的方面来讲也可作为模型小玩具,帮助孩子在简单装配过程中获得乐趣以及提高孩子的动手能力。
本课题研制的四足行走小车采用直流单电机驱动,运用齿轮传动机构将运动传输和分配给四组四连杆行走机构。
行走机构的运动模仿马匹的迈步动作,采用对角线运动一致的原则进行设计,经由曲柄摇杆机构带动腿部机构的运动,实现小车的交替行走。
此四连杆行走机构杆长根据足部行走轨迹要求利用图解法设计出来。
关键词:四足行走,小车,连杆机构,图解法THE DESIGN OF WALKING MACHINE WITHFOUR LEGSAbstractThe quadruped walking carriage is a branch of foot mechanical research and development , because of the load, stability better than two feet, in structure than six eight feet, so the four walking carriage aroused the attention of many researchers at home and abroad. Four-legged walking carriage to the large side can be applied to planetary exploration, factory production lines and battlefields delivery of supplies; to small in terms but also as a model for small toys to help children have fun in a simple assembly process and improve the child's ability .This project developed four-legged single car DC motor drive, the use of the gear transmission mechanism motion transmission and distribution to the four groups of four-bar linkage runninggear. Sports running gear imitate horses move action, consistent principle diagonal movement designed to drive the movement of the leg mechanism via rocker mechanism, realize the car alternating walking. This four-bar linkage mechanism lever length walking foot walking tracks designed according to the requirements of use graphical method.Key words: quadruped walking,carriage,linkage, graphic method目录1 绪论 (1)1.1 引言 (1)1.2 发展概况 (1)1.2.1 国内发展概况 (2)1.2.2 国外发展状况 (3)1.3 课题背景 (5)1.3.1课题来源 (5)1.3.2实际应用价值 (5)1.4 目的以及课题研究内容 (6)2 四足小车的整体结构设计 (6)2.1 小车整体结构设计的理论分析 (6)2.2 小车腿部方案的介绍 (7)2.2.1方案比较 (8)2.2.2 腿部方案的选定 (8)2.3 小车整体结构布置方案 (8)2.4 小结 (9)3 腿部四杆机构的设计 (10)3.1 轨迹设计 (10)3.2 四杆机构设计的相关知识 (11)3.2.1 曲柄摇杆机构 (11)3.2.2 曲柄存在条件 (11)3.2.3急回运动特性和行程速比K (11)3.2.4压力角与传动角 (12)3.2.5 死角 (13)3.2.6 铰链四杆机构的运动连续性 (13)3.2.7 按预定轨迹设计四杆机构 (13)3.3 杆长的设计及计算 (14)3.3.1 杆长设计方案介绍与比较 (14)3.3.2 作图法设计四杆长度 (15)3.3.3验证机构的最小传动角 (16)3.3.4运动分析 (17)3.4 小结 (18)4 传动方案及电机选择 (19)4.1 电机的选择 (19)4.2 齿轮传动系统的设计 (19)4.3 杆件的布局 (21)4.4 减速箱的布局 (22)5 小车零配件的选择以及加工 (23)5.1 四杆机构各杆件的尺寸设计 (24)5.2 关键零部件材料 (25)5.3 关键零部件加工 (27)5.4 小结 (28)小结 (29)致谢 (30)参考文献 (32)译文及原文 (33)1 绪论1.1 引言四足行走小车是当如今足式机械研究发展的一个的分支,因其在载重、稳定性方面比两足好,在结构方面比六足、八足简单,所以受到众多科研人员的关注。
中山装:A Symbol of Modern Chinese CultureThe Zhongshan Suit, named after Dr. Sun Yat-sen, is a distinctive and iconic garment that has become synonymous with modern Chinese culture. Its history and design reflect not only the evolving fashion trends of the 20th century but also the political and cultural aspirations of the Chinese people.The origin of the Zhongshan Suit dates back to the early 20th century, when Dr. Sun Yat-sen, a pivotal figure in China's modernization movement, adopted a western-style suit as his official attire. This suit, with its four pockets symbolizing the virtues of patriotism, democracy, science, and civilization, became a symbol of the revolutionary spirit and national pride.The design of the Zhongshan Suit is both practical and stylish. It typically features a double-breasted jacket with four buttons, a stand-up collar, and flap pockets on the chest. The pants are straight-legged and often have a side stripe for added visual interest. The suit is often made of wool or cotton, ensuring both comfort and durability.The appeal of the Zhongshan Suit lies in its timeless elegance and versatility. It can be dressed up for formal occasions or dressed down for casual wear, making it a favorite among both the younger and older generations. Its popularity has also spread beyond China, with many people internationally embracing it as a unique and stylish choice of clothing.In conclusion, the Zhongshan Suit is not just a garment; it's a cultural icon that represents the blend of tradition and modernity in China. Its design, history, and symbolism continue to resonate with people, making it a timeless part of Chinese fashion and culture.。
Proceedings of the 5th International Conference on Climbing and Walking Robots CLAWAR 2002, 25-27 September 2002 Paris, France.Virtual Prototyping of the Four-Legged Walking Machine BISAMO. Lenord a, J. Albiez b and M. Hiller aa Institut for Mechatronics and System Dynamics,Gerhard-Mercator-Universität Duisburg, 47048 Duisburg, Germany.{lenord, hiller}@mechatronik.uni-duisburg.deb Interactive Diagnosis and Service Systems (IDS), Research Center for Information Technologies (FZI),Universität Karlsruhe, Haid-und-Neu-Str. 10-14, 76131 Karlsruhe, Germany.albiez@fzi.deABSTRACTThe four-legged walking machine BISAM (Biologically Inspired Walking Machine) is being developed at the FZI (Forschungszentrum Informatik) in Karlsruhe. The project aims to use biological inspiration to create a technical system taking advantage of the principles observed in natural locomotion. This leads to two different aims, the modeling of the natural locomotion on the one hand, and the virtual prototyping of the technical system on the other hand. The biological system is modeled to reproduce the cyclic motion and to calculate the applied driving momentum in the joints by solving the inverse dynamics problem. This is used to describe the relation between weight, velocity, foot positioning, stiffness of the legs and other important parameters that influence the stability of locomotion. These insights need to be applied to the technical system. A virtual prototype of the walking machine offers the opportunity to quickly verify the impact of adjustments to the construction and/or the control system. This papers focus is on the modular model of a mammalian locomotive system which has an object oriented structure that is open to be used for modeling of biological locomotion systems as well as technical systems. The system models of the simplified mammalian locomotion system and the BISAM walking machine are described in detail. ANALOGY OF BIOLOGICAL AND MECHATRONIC LOCOMOTION SYSTEMSStudying the sophisticated and highly developed locomotion system of mammals, one can identify several units (Figure 1) that in their combination and arrangement allow complex motions and interactions with the environment.The increase of automation in machine engineering over the last few decades has made it necessary to develop a holistic view of these complex systems. Instead of developing the componentsseparately, the whole is described as a mechatronic system, including all mechanical, electronic and information technology parts. Describing a biologically inspired walking machine as a mechatronic system reveals a certain analogy between biological and mechatronic systems.In biological systems the nervous system is responsible for all tasks that are related to locomotive control. This includes higher-level capabilities that are characteristic of an autonomous system such as perception and decision-making. Furthermore there are mid-level abilities that are generally performed subconsciously such as motion coordination while taking into consideration the actual state and stability. Nerves and other entities in the signal path perform low-level tasks. These processes are still part of current research in neurology.Figure 1: Comparison of the Structure of Biological and Technical Locomotion Systems In a mechatronic system the control unit, the bus-system and the signal processor contribute similar functionality even though, especially at the higher level, these capabilities have not yet been applied to complex walking machines in an appropriate manner. Analogous to the musculature applying forces to the skeleton, the actuators of the technical system act on the mechanical structure. The bones of the skeleton are connected by joints and are analogous to the mechanical structure of the mechatronic system.MODULAR MODEL OF QUADRUPED LOCOMOTIONBased on the analogy between biological and mechatronic systems described, a few main functional blocks have been chosen as modules of the locomotion system model depicted in Figure 2. The control unit is represented in MCA2, a software tool that offers an architecture that supports control subsystems with a modular structure. This software is already being used to control a B ISAM prototype.The whole locomotion system except the control unit is modeled using the dynamic system modeling library M OBILE[1] [4] that offers strong capabilities in handling complex mechanical systems withclosed kinematic loops, and supports the interdisciplinary modeling of mechatronic systems. This part of the system model consists of three modules describing the dynamic behavior of the signal processing system, the actuators and the mechanical structure. The sensors are represented by a list of pointers to the relevant system variables of the model. The sensor dynamics, if relevant, can be described within the signal-processing module.Object Oriented Dynamic Systemmodular locomotion system model: mammal / walking machineThe module for the mechanical system provides the equations of motion of the locomotion system under consideration of a multibody system representation of the mechanical structure. The multibody system has a modular structure in itself that comes along with the object-oriented approach of the dynamic system modeling library M OBILE. Connecting objects derived form the same base class representing the capabilities of the kinetostatic transmission element, enables the calculation of all kinematic and kinetic states of all reference systems.The mechanical structure of a locomotion system is primarily given through the skeleton consisting of bones and joints. Their properties and modeling aspects are discussed to derive a base class that covers the requirements of technical and natural locomotion systems.Modeling Aspects of Skeletal BonesThe bones build the carrying structure of the natural locomotion system. They undergo only small deformations and can be considered as rigid bodies. All other body parts are directly or indirectly attached to this structure. In contrast to technical systems, many of these body parts can not be considered as rigid. Some approaches describe the relative motion of inner organs using wobbling masses. This comes with a large number of unknown parameters that are difficult to identify.In any case, the modeling of the bones is always involves modeling of the inertia properties as well as the relative displacements and rotations. In conclusion the class MoBone, derived from the base class of the kinetostatic transmission element, concentrates inertia and geometrical properties in one. Up until now mass and inertia are classically concentrated in the bones center of mass.Modeling Aspects of Skeletal JointsA skeleton gets its movability through the joints interconnecting the bones. In a biological sense joints can be divided into two groups: synathrose and diathrose joints. Synathrose joints allow only small movements. Bones interconnected by these joints can be modeled as one rigid body since they do not have a relevant effect on the locomotion. The diathrose joints are so called real joints. These build a gap between the bones, surrounded by the capsule and held in position by the ligaments. These joints can perform movements in a wide range, actuated by the musculature. The number of rotational axes and the workspace depend on the shape of bones and cartilage. There are joints with one (i.e. the elbow), two (i.e. the wrist) and three (i.e. the hip joint) axes. The joint axis in general performs a spatial movement depending on the joint angle. Its consideration depends on the desired precision and can be modeled by some kind of substitution mechanism, i.e. a pantograph linkage. In the most cases translational displacements are comparatively small. An exception is the sizeable motion of the scapula relative to the trunk as used by quadrupeds to increase the reach of the forelimbs.The performance of the joint is influenced by the interacting bone surfaces, the ligaments and muscles. Due to this the kinematic model of the joints is directly influenced by the chosen actuation model. If one decides to model the musculature as prismatic joints as shown in Figure 3, the relative position of origo and insertio are essential to calculate the joint angle and torque for a given muscle contraction and force. Therefore its much more suitable to define the related reference frames K o and K i as part of the joint object rather than as part of the bone object. The same is true for technical systems that use some kind of transmission linkage as the spindle drive shown on the left in Figure 3. This concept is implemented in the class MoAnthropomorphicJoint . Depending on the chosen actuation type, the inner joint structure is changed due to the specific requirements, but the skeletal structure remains unaffected.The four-bar representation shown is just one possible solution to describe the functionality of a joint. In the actual implementation the MoAnthropomorphicJoint class provides two possible representations of the joint. In the context of a technical system (the spindle drive used in the B ISAM) the four-bar linkage is chosen as shown in Figure 5. In the context of the biological locomotion system the most simple solution, a revolute joint, is chosen, since up until now only the joint torque is of interest. The modeling of muscles is a field of research i n itself and will not be part of future investigations, even though the modular concept is open to implement more complex kinematics for muscle actuated joints.Due to the fact that in locomotion systems joints with multiple axes occur it is necessary that the joint object can adapt itself to this demand. This way it is possible to use the same joint class for modeling the hip joint as spherical joint with three axes as for the knee joint that might be modeled with one axis only. Furthermore the spatial movement of i.e. the spine modeled by two or three axes per vertex can be easily condensed into a planar mechanism by reducing the number of axes without changing the skeletal structure of the model.Modeling Aspects of Mammalian SkeletonsThe mammals skeleton has a characteristic structure that is nearly the same for all species. In terms of a modular structure of the locomotion system it is intuitive to chose head, trunk and limb as separate modules. Depending on admissible relative motions the head could be seen as part of the trunk, but in the sense of a general structure its considered separately. In natural locomotion the trunk has an important role even though in many walking machines it is just one rigid body with no degrees of freedom. To describe the observed relative motions of mammals it is desirable to subdivide the trunk into spine, pelvic girdle and pectoral girdle. The limb describes the motion of the ground contact relative to the trunk.Each of these modules can be detailed according to t h e specific requirements. In the following section two different locomotion systems are discussed and the chosen inner structure of the modules presented. To study the natural locomotion of mammals the simplified mammal model is derived. To model the performance of the walking machine B ISAM the virtual prototype model is presented. SIMPLIFIED MODEL OF MAMMALIAN LOCOMOTIONStudying mammalian locomotion demands a large effort with regard to the data acquisition. It is almost impossible to make an animal move in a reproducible way. Furthermore information about the internal condition of the system is difficult to acquire. In technical systems force, torque and other sensors directly measure the load on the actuator. In biological systems these data can only be indirectly acquired i.e. by analyzing the body motion and measurement of interactions with the environment. Foot-ground contact forces are measured with sensitive devices. A synchronous radiographical study of the mammals kinematics provides all necessary information to solve the inverse dynamics and thus determine the applied joint torques in the mammal. Such experiments (Figure 4) have been performed by [5]. The observation that the relation of leg stiffness and size of the animal is approximately constant for many species, leads to the hypothesis that the optimized leg designs found in nature support self-stabilization of dynamic gaits [5]. Simulations of hopping mass-spring systems show the mentioned self-stabilizing behavior when choosing leg stiffness, mass and stance angle according to the given horizontal velocity.Further investigation of these biological concepts is very promising and can be performed efficiently as a modeling environment exists that allows the comfortable adaptation and condensation of locomotion system models. As a basis for further investigations, the new object oriented library MoLocomotionLib for the multibody systems modeling software M OBILE has been developed. As previously mentioned, it provides objects for joints that allow switching between different actuation types, and links whose parameters can be easily edited. Using these objects the mechanical structure, including the actuation, can be individually built and is flexibly handled to build the differential equations according to the chosen number of degrees of freedom and additional states.Figure 4: Radiographical Analysis of the Pika [5] and model of the simplified mammal The simplified mammal model is depicted on the right in Figure 4. The Head has been chosen as the reference body and is restricted to planar motion. The head is connected to the spine in the trunk module. The spine is given four rotational degrees of freedom at the level of the throat, the chest, the lower back and the tail. The pectoral girdle consists of one prismatic joint per limb modeling the motion of the scapula relative to the spine. The limbs are represented by three revolute joints each. The displacement of the limbs along the transversal axis are for better visibility only. As described the given structure can be easily adapted. A spatial model can be achieved by chosing additional axes in the MoAnthropomorphicJoint module. Furthermore not all mentioned joints need to be considered. For the actual work with data from the pika only one degree of freedom in the lower back is considered for the spine.VIRTUAL PROTOTYPE OF THE BISAM WALKING MACHINEThe goal of the system model of the B ISAM walking machine is to provide a virtual prototype that can be plugged into the existing MCA2 controller instead of the real prototype. The virtual prototype is to be used instead of the real prototype to develop and optimize control strategies. A big advantage of the virtual prototype is that it cannot be damaged due to the bad choice of parameter sets that end up causing instability in the system. The influence of geometrical parameters on the systems performance and mechanical stress is of interest as well. Design parameters can be chosen freely for optimization.Signal Processing ModelAt this stage the signal processing is not being considered as a dynamic block, since the time delay is small compared to the eigenfrequency of the mechanical system. This might be changed in the future if the signal transmission and processing turns out to be a bottleneck in the control system.Actuator ModelThe actuator model is divided into a mechanical and an electrical part. The electrical part covers the dynamics of the electrical circuits. The parameters of the ohmic resistance R A and inductance L A of the armature, and the flux density of the permanent magnet are taken from data sheets. The angular velocity ω is know from the state of the related revolute joint from the mechanical part. The armature voltage U A depends on the actual control output. The state of the electrical part is given by the armature current I A whose first derivative can be determined according to [1] by solving the first order differential equation 1.A A A A A I R U L I ⋅−⋅−=⋅ωψ& ( 1 ) The electromotive torque T El is known from equation 2 and is applied to the mechanical part of the spindle drive.A El I T ⋅=ψ ( 2 ) As already mentioned the electric actuator is directly coupled with the actuated revolute joint depicted in Figure 5, which shows the topology of the mechanical part of the spindle drive. Considering the gear ratio i the state of the revolute joint representing the spindle and the state of the screw joint representing the nut on the spindle can be determined. In this manner the rotational motion of the rotor is transformed into a linear motion driving the joint linkage of theB ISAM walking machine. The overall kinematic behavior of the spindle drive could have been modeled using a single prismatic joint, neglecting the exact inertial distribution. In the topology chosen the inertia properties of the motor housing with carrier, the rotor, the spindle and the nut can be considered in the correct manner. The exact proportions haven been taken from the 3D CAD model shown on the left inFigure 5.Figure 5: Limb of the B ISAM Walking Machine and Topology of the Joint Linkage withSpindle Drive ActuatorFrictional effects due to rolling friction in the ball bearings of rotor, spindle and nut have been modeled by a single velocity dependent friction torque in the actuated joint.Mechanical System ModelThe mechanical system model uses M OBILE s explicit solver to efficiently solve the closed kinematic loops. The inertia forces, frictional forces and the externally calculated electromotive force are considered in the equations of motion built in minimal form.Another challenging part of the mechanical model is the discontinuous foot-ground-contact [3]. In this case an event handling routine is used that searches for the zero crossing of the foot ground distance to determine the exact contact time. The contact forces are determined using a spatial spring damper model that takes into account stick-slip effects.CONCLUSIONS AND FUTURE WORKThe presented modular structure of locomotion systems is suitable for modeling biological and technical locomotion systems, as has been shown by the simplified mammal model and the virtual prototype of the B ISAM walking machine. Furthermore the flexible structure of joint and link objects provide basic modules that allow the efficient adaptation of a given system structure to achieve condensed models of the locomotion systems.An current project transfers anatomic data to the simplified mammal model. An initial aim is to reproduce the radiographically measured planar motion of the pika.In the near future, validation of the virtual prototype model will be finished. Actual measurements of the single limb are used to p rove the models accuracy. Unfortunately the experimental results could not yet be reproduced satisfactorily by simulation. After the model is validated its coupling with the existing controller will be completed.REFERENCES[1] Isermann, R. (1999). Mechatronische Systeme, Berlin: Springer-Verlag.[2] Kecskeméthy, A. (1993) Mobile - An Object-oriented Tool-set for the Efficient Modeling ofMechatronic Systems. In Hiller, M. and Fink, B. (Ed.), Proceedings of the 2nd Conference on Mechatronics and Robotics, September 27-29, 1993, Moers, Germany, p.447.[3] Kecskeméthy, A., Lange, C. and Grabner, G. (2001) Object-oriented modeling of multibodydynamics including impacts. Proceedings of the European Conference on Computational Mechanics ECCM, Cracow, Poland, June 26.-29. 2001, p.1.[4] Lenord, O., Huber, T., Franitza, D. and Hiller, M. (2001) Interdisciplinary Modelling ofMechatronic Systems by Coupling Simulation Tools. Proceedings of the IAR 16th Annual Meeting, November 22-23, 2001, Illkirch, France, p.91.[5] Seyfarth, A. G. M. and Blickhan, R. (2001). Stable Operation of an Elastic Three-SegmentedLeg. Biol Cybern., 5 (84), 365-382.[6] Witte, H., Biltzinger, J., Hackert, R., Schilling, N., Schmidt, M., Reich, C. and Fischer, M. S.(2001). Torque patterns occuring during cyclic locomotion of small mammals on flat ground. J.Morph., 3 (248), p.301.。