运动控制系统课程仿真课程设计报告书
- 格式:doc
- 大小:441.50 KB
- 文档页数:12
运动控制系统课程设计
目录
一.课程设计的性质、目的和任务 (3)
二.课程设计的主要内容和要求 (4)
1设计任务与分析 (4)
2调速系统总体设计 (5)
三.性能指标 (6)
四.设计对象参数 (6)
五.直流双闭环调速系统电路设计 (7)
5.1晶闸管-电动机主电路的设计 (7)
主电路设计 (7)
5.2转速、电流调节器的设计 (8)
5.2.1电流调节器 (9)
5.2.2转速调节器 (11)
5.3转速检测电路设计 (13)
5.4电流检测电路设计 (13)
六.心得体会 (14)
七.参考文献 (14)
双闭环不可逆直流调速系统设计一.课程设计的性质、目的和任务
本设计从直流电动机的工作原理入手,并详细分析了系统的原理及其静态和动态性能。然后按照自动控制原理,对双闭环调速系统的设计参数进行分析和计算,利用Simulink对系统进行了各种参数给定下的仿真,通过仿真获得了参数整定的依据。
转速、电流双闭环直流调速系统是性能很好,应用最广的直流调速系统, 采用转速、电流双闭环直流调速系统可获得优良的静、动态调速特性。转速、电流双闭环直流调速系统的控制规律,性能特点和设计方法是各种交、直流电力拖动自动控制系统的重要基础。应掌握转速、电流双闭环直流调速系统的基本组成及其静特性;从起动和抗扰两个方面分析其性能和转速与电流两个调节器的作用;应用工程设计方法解决双闭环调速系统中两个调节器的设计问题,等等。
通过对转速、电流双闭环直流调速系统的了解,使我们能够更好的掌握调速系统的基本理论及相关内容,在对其各种性能加深了解的同时,能够发现其缺陷之处,通过对该系统不足之处的完善,可提高该系统的性能,使其能够适用于各种工作场合,提高其使用效率。

运动控制系统课程设计
第1章绪论
1.1设计目的和意义
1.2设计任务
第2章双闭环直流脉宽调速系统的原理设计
2.1 方案选定
2.2 桥式可逆PWM变换器的工作原理
2.3 双闭环直流调速系统的静特性分析
2.4 双闭环直流调速系统的稳态结构图
第3章双闭环直流脉宽调速系统的硬件电路设计3.1 硬件结构
3.1.1 主电路
3.1.2 泵升电压限制
3.2 主电路参数计算和元件选择
3.2.1 整流二极管的选择
3.2.2 绝缘栅双极晶体管的选择
3.3 调节器参数设计和选择
3.3.1调节器工程设计方法的基本思路
3.3.2 电流环的设计
3.3.2.1 确定时间常数
3.3.2.2 选择电流调节器结构
3.3.2.3 选择电流调节器参数
3.3.2.4 校验近似条件
3.3.2.5 计算ACR的电阻和电容
3.3.3 转速环的设计
3.3.3.1 确定时间常数
3.3.3.2 ASR结构设计
3.3.3.3 选择ASR参数
3.3.3.4 校验近似条件
3.3.3.5 计算ASR电阻和电容
3.3.3.6 检验转速超调量
3.3.3.7 校验过渡过程时间
3.4 反馈单元
3.4.1 转速检测装置选择
3.4.2 电流检测单元
3.5 系统动态结构图
第4章系统仿真
总结
参考文献
第1 章绪论
电动机作为最主要的动力源和运动源之一,在生产和生活中占有十分重要的地位。电动机的调速控制方法过去多用模拟法,随着单片机的产生和发展以及新型自关断元器件的不断涌现,电动机的控制也发生了深刻的变化[1]。
1.1设计目的和意义
(1)、通过对电力拖动控制系统的设计,了解电力电子、自动控制原理及电力拖动自动控制系统课程所学内容,初步具备设计电力拖动自动控制系统的能力,为今后从事技术工作打下必要的基础。
运动体控制系统课程设计
课程描述
本课程旨在教授学生运动体控制系统的基础知识和设计理念。在学习本课程时,学生将掌握运动体的基础知识,如运动学、动力学和能量守恒等。同时,学生将学习关于运动体控制的基本策略,包括控制系统的设计和实现。
教学目标
1.理解运动体的基础知识,如运动学、动力学和能量守恒等;
2.掌握运动体控制的基本策略,包括控制系统的设计和实现;
3.学会如何应用上述知识和策略,设计出运动体控制系统,能够实现对
运动体的稳定控制。
课堂安排
第一周
•学习运动体的基础知识:运动学、动力学和能量守恒;
•了解运动体控制系统的基本框架;
•练习基于模型的控制方法。
第二周
•学习基于PID控制器的运动体控制;
•掌握如何建立数学模型以进行运动体控制;
第三周
•学习基于状态空间方法的运动体控制;
•掌握离散系统和连续系统的状态空间模型。
第四周
•学习先进的控制方法(例如,模糊控制、神经网络控制等);
•了解针对不同场景下的运动体控制问题的适用于不同的控制方法;
第五周
•设计一个运动体控制系统,该系统可以应对特定的运动问题;
•学习如何在Matlab中实现运动体控制系统。
课程要求
•学生应具备基本的数学和编程知识;
•学生应积极参与课堂讨论和练习,以加深对本课程的理解;
•学生需要提交一个基于Matlab的运动体控制系统设计方案,该方案应能够有效控制运动体的运动。
课程评分
•平时表现和课堂练习:50%
•运动体控制系统设计方案:50%
参考资源
1.Control of Movement for the Physically Disabled: Control for


《控制系统设计》
课程设计报告书
题目:带电流变化率内环的三环直流调速系
统设计与实践
学院:信息工程学院
专业:自动化
学生姓名:陈臻誉
学生学号: 2012550413
组员姓名:张凯林
完成时间: 2015年7月
指导教师:李辉
成绩评定:
目录
一、选题背景 (3)
二、题目要求 (3)
2.1设计目的 (4)
2.2 设计内容 (4)
2.3设计要求 (5)
2.4电机拖动控制系统设计与仿真 (5)
三、方案论证 (5)
四、过程论述 (6)
4.1电流调节器设计 (6)
4.1.1确定时间常数 (6)
4.1.2选择电流调节器结构 (7)
4.1.3计算调节器电阻和电容 (8)
4.2速度调节器设计 (8)
4.2.1计算转速调节器参数 (8)
4.2.2计算调节器电阻和电容 (9)
4.2.3校核转速超调量 (9)
五、结果分析 (10)
5.1利用MATLAB 仿真软件系统建模及仿真实验及实验结果 (10)
双闭环仿真实验 (10)
5.1.2双闭环调速系统调节参数 (11)
5.1.3双闭环系统仿真模型 (13)
5.1.4仿真波形分析 (14)
5.2三闭环仿真实验 (16)
波形结果 (18)
六、课程设计总结 (19)
七、参考文献 (20)
带电流变化率内环的三环直流调速系统设计与实践
一、选题背景
本课题为了实现转速和电流两种负反馈分别起作用,在V-M调速系统中设计两个调节器,分别引入转速负反馈和电流负反馈。二者之间实行嵌套联接。把转速调节器的输出当作电流调节器的输入,再用电流调节器的输出去控制电力电子变换器UPE。从闭环结构上看,电流环在里面,称作内环;转速环在外边,称作外环,形成转速、电流双闭环调速系统。
运动控制系统课程设计
设计名称双闭环直流调速系统专业班级自动化10—3
学号**********
姓名王韶雨
指导教师李铁鹰
运动控制系统课程设计
设计名称双闭环直流调速系统专业班级自动化10—3
学号**********
姓名张浩宇
指导教师李铁鹰
目录
一、设计任务 (2)
1、设计对象参数 (2)
2、性能指标 (2)
3、课程设计的主要内容和要求 (2)
3.1电力拖动不可逆直流调速系统主电路的设计 (2)
3.2控制电路的设计 (2)
二、电力拖动不可逆直流调速系统主电路的设计 (3)
1、整流电路和整流器件的选择 (3)
2、整流变压器参数的计算 (3)
3、整流器件的保护 (4)
4、平波电抗器参数的计算 (4)
5、触发电路的选择 (4)
三、直流双闭环调速系统原理图设计 (5)
1系统的组成 (5)
2系统的电路原理图 (6)
3直流双闭环调速系统调节器设计 (6)
3.1获得系统设计对象 (8)
3.2电流调节器的设计 (6)
3.3转速调节器的设计 (11)
四、系统起动过程分析 (16)
一、设计任务
1、设计对象参数
(1)P nom=30KW (2)U nom=220V (3)I nom=136A
(4)n nom=1460r/min (5)R a =0.2Ω(6)R Σ=0.6Ω
(7)C e=0.2 v.min/r (8)RΣ=0.18Ω(9)K S=42
(10)T oi=0.002 s (11)T0=0.01 s (12)λ=1.5
(13)U*nm=8 V (14)U*im=8 V
2、性能指标
σi≤5% σn≤10% 3、课程设计的主要内容和要求
设计题目1:电流、转速双闭环调节器设计
设计内容:
1.转速调节器ASR 及电流调节器ACR 的设计
2.转速反馈和电流反馈电路设计
3.集成触发电路设计
4.主电路及其保护电路设计
设计要求:
1.转速调节器ASR (%5≤n σ);
2.电流调节器ACR (%5≤i σ)
设计题目2:单闭环交流电机调压调速系统
设计内容:
1.实现交流电动机调压调速系统
2.实现交流电动机开环调速
3.实现交流电动机的闭环调速
设计要求:
1.交流电动机开环调速(n≤1500rpm )
2.交流电动机闭环调速(n≤1000rpm )
3.用MATLAB 软件进行仿真
设计题目3:基于矢量控制的PMSM 高性能伺服调速系统
设计内容:
空间电压矢量的宽调制技术使得交流电机能够获得和直流电机相媲美的性能。而PMSM 矢量控制系统采用C 语言Q 格式编程技术使系统达到较高的性能指标,位置环30000个脉冲给定值(电机转3圈),调节时间为0.15s 。
设计要求:
1.了解空间矢量脉宽调制原理。
2.了解永磁同步电机(PMSM )。
3.掌握基于矢量控制的PMSM 高性能伺服调速系统的设计方法。
设计题目4:绕线式异步电动机串级调速系统设计
设计内容:
本设计主要内容是绕线式异步电动机的串级调速系统主电路和触发电路的设计。其中主电路的设计包括可控整流电路、不可控整流电路和逆变变压器;触发电路主要包括KC 系列的移相触发电路和ULN2003。考虑到系统运行时可能出现的问题,相应的设计了系统的保护电路。
设计要求:
1.设计串级调速主电路;
2.选择和设计串级调速触发电路;

运动控制系统课程设计任务书
河南城建学院
班级专业课程名称指导教师
电气与信息工程学院
编写:陈国振审核:葛广军课程编码课程名称《运动控制系统》适用
专业自动化学时考核方式考查学分1先修课程《电机拖动》《过程控设计
时间制》、《计算机控制》《自动控制原理》、《运动控制系统》一、设
计时间及地点
1、设计时间:
2、地点:2号系馆楼、图书馆、机房、实验室二、设计目的和要求1、设计目的
2、设计要求
完成所选题目的分析与设计,进行系统总体方案的设计、论证和选择;系统单元主电路和控制电路的设计、元器件的选择和参数计算;课程设计
报告的整理工作。三、设计题目和内容
1、单闭环不可逆直流调速系统设计自拟控制系统性能指标的要求
(调速范围、静差率、超调量、动态速降、调节时间等),设计系统原理图,完成元器件的选择,选择调节器并计算调节器参数,并进行仿真或实
验验证系统合理性。
2、单闭环可逆直流调速系统设计自拟控制系统性能指标的要求(调
速范围、静差率、超调量、动态速降、调节时间等),设计系统原理图,
完成元器件的选择,选择调节器并计算调节器参数,并进行仿真或实验验证系统合理性。
3、V-M双闭环不可逆直流调速系统设计
自拟控制系统性能指标的要求(调速范围、超调量、动态速降、调节时间、抗扰性能等),设计系统原理图,电流环的设计,转速环设计,完成元器件的选择,计算选择合理调节器参数,并进行仿真或实验验证系统合理性。
4、PWM直流调速系统设计
自拟控制要求,完成系统设计方案的论证和选择,画出系统原理图,完成元器件的选择和相关参数的计算,系统动态结构图及其仿真分析或实验验证系统合理性。
运动控制系统课程设计大纲
一、课程设计内容安排:
第一部分:
完成一个典型逻辑无环流直流调速系统工程设计实例;
第二部分:
完成一个逻辑无环流可逆直流调速系统的综合实验
二、设计系统对象原始数据:
电动机:功率P NOM=180W,U NOM=220V,I NOM=1.2134A,n nom=1500r/min,电枢内阻Ra=1.25,整流装置内阻Rrec=1.3,平波电抗器内阻R L=0.3,GD2=3.53,整流回路总电感L=200mh,系统允许最大过载倍数λ=1.5
三、系统工程设计要求:
1、系统性能指标要求:电流超调量σi%≤5%,空载启动到额定转速时的超调量σn%≤10%,空载启动到额定转速时过度过程时间ts≤0.5s。
2、主电路结构(结构图)采用三相全控桥电路,各单元部件/元件的电压、电流和功率的选择应满足系统对象的要求。
3、双闭环控制调节器的参数设计采用工程设计方法(书中例题设计过程)。
4、系统按逻辑无环流可逆控制设计
三、系统综合实验
1、单元电路测试
2、系统连接
3、系统实验调试
4、系统综合性能指标测试
四、课程设计报告要求
1.编写设计说明书一分,系统电路原理总图一张
2、附综合实验报告
2、写出课程设计过程中自己的运行结果分析、体验与收获。

《运动控制系统课程设计》
《运动控制系统》课程设计
一、性质和目的
自动化专业、电气工程及其自动化专业的专业课,在学完本课程理论部分之后,通过
课程设计使学生巩固本课程所学的理论知识,提高学生的综合运用所学知识,获取工程设
计技能的能力;综合计算及编写报告的能力。
二、设计内容
1.根据指导教师所下达的《课程设计任务书》课程设计。
2.主要设计内容包括:
(1)根据任务书要求确定总体设计方案
(2)主电路设计:主电路结构设计(结构选择、器件选型、考虑器件的保护)、变
压器的选型设计;
(3)控制电路设计:控制方案的选择、控制器设计(4)保护电路的选择和设计
(5)调速系统的设计原理图,调速性能分析、调速特点 3.编写详细的课程设计说
明书一份,并画出调速系统的原理图。。三、设计目的
1.熟练掌握主电路结构选择方法、主电路元器件的选型计算方法。
2.熟练掌握保护
方式的配置及其整定计算。 3.掌握触发控制电路的设计选型方法。。
4.掌握速度调节器、电流调节器的典型设计方法。
5.掌握绘制系统电路图绘制方法。
6.掌握说明书的书写方法。四、对设计成品的要求
1.图纸的要求:
1)图纸要符合国家电气工程制图标准; 2)图纸大小规范化; 3)布局合理、美观。
2.对设计说明书的要求 1)说明书中应包括如下内容
①目录
②课题设计任务书;
③调速方案的论证分析(从经济性能和技术性能方面进行分析论证)和选择;④所
要完成的设计内容
⑤变压器的接线方式确定和选型;
⑥ 主电路元器件的选型计算过程及结果;⑦控制电路、保护电路的选型和设计;
⑧调速系统的总结线图系统电路设计及结果。 2)说明书的书写要求
《控制系统综合》课设计指导老师:
年级专业
姓名学号 5
4
9
6
2013 年12 月27 日
题目及要求
设计题目:直流调速系统计算机仿真
设计内容(指标及参数):
(1)静态精度(转差率S), 在电网电压波动±10%,负载变化±20%,频率变化±1HZ时,S<5%,电流和转速超调量σ〈1000,振荡次数N<(2~3),D>10~15;
(2) 电动机数据:额定电流136A,额定电压230V,功率30KW,额
定转速1460转/分,电势转速比
C=0.132,电枢电阻RΩ=0.5Ω,过载系数λ=1.5,
e
可控硅整流装置K S=40.
T=0.03s,m T=0.18s;
L
(3) 测速发电机,永磁式,额定数据为∶电压110V,电流0.045A,转速1900r/min,
P=23.1W,I=0.21A,n=1900r/min。
g g g
目录
1前言 0
2系统的组成及工作原理 0
3转速调节器和电流调节器的参数设计 (1)
3.1静态计算 (1)
3.2动态计算 (1)
3.2.1电流调节器(内环)动态参数计算 (1)
3.2.2转速调节器(外环)动态参数计算 (4)
4系统仿真和分析 (6)
4.1系统仿真模型的搭建及仿真 (6)
4.2仿真调试分析 (7)
5结论 (7)
参考文献 (8)
1前言
直流调速系统是传统的调速系统,自19世纪80年代起至19世纪末以前,工业上传动所用电动机一直以直流电动机为唯一方式。它具有稳速精度高、调速比大、响应时间短等特点,宜于在广泛范围内平滑调速,故广泛应用于轧钢、机床、轻工、计算机、飞机传动机构等领域。

天津城建大学
课程设计任务书
控制与机械工程 学院 电气工程及其自动化
课程设计名称: 运动控制系统课程设计
设计题目: 直流电动机开环调速系统仿真
完成期限
设计依据、要求及主要内容:
一、已知条件及控制对象的基本参数:
已知直流电动机额定参数为nom =220V U ,nom I =136A ,nom n =1460r/min ,4极,a R =0.21
Ω,22=GD 22.5m N 。励磁电压f =220V U ,励磁电流f =1.5I A 。采用三相桥式整流电路,整流器内阻
rec =1.3R Ω。平波电抗器p =200L mH 。n =5V U
二、 设计要求
(1)分析系统结构、原理
(2)利用matlab/simulink 绘制系统的仿真模型并对模块参数进行设置。
(3)对该晶闸管-整流电动机开环调速系统进行仿真,并观察电动机在全压启动和启动后加额定负载时电动机的转速、转矩和电流的变化情况。
三、 参考文献
1.王兆安,等.电.力电子技术[M 〕.北京:机械工业出版社,2000.
2.张广溢,等.电机学[M]。重庆:重庆大学出版社,2002.
3.王军.自动控制原理[M]。重庆:重庆大学出版社,2008.
4.周渊深.交直流调速系统与Flat 1 ab 仿真[M].俨比京:中国电力出版社,2004.
5.陈伯时,电力拖动自动控制系统(第2版)[M].北京:机械工业出版社.2005
6.陈伯时.电力拖动自动控制系统一一运动控制系统(第3版)机械工业出版社
指导教师(签字):
系(教研室)主任(签字):
批准日期: 2015年 1 月19 日

目录
摘要 (3)
1设计任务及要求 (4)
1.1设计任务 (4)
1.2设计要求 (5)
2系统结构设计 (6)
2.1 方案论证 (6)
2.2系统设计 (6)
3调节器的设计 (7)
3.1电流调节器的设计 (7)
3.1.1确定电流调节器的时间常数 (7)
3.1.2设计电流调节器结构 (7)
3.1.3校验近似条件 (9)
3.1.4计算调节器电阻和电容 (9)
3.2速度调节器的设计 (9)
3.2.1电流环的等效闭环传递函数 (9)
3.2.2确定转速调节器的时间常数 (10)
3.2.3转速调节器结构设计 (10)
3.2.4校验近似条件 (11)
3.2.5计算调节器的电阻和电容值 (12)
4系统主电路设计 (13)
4.1主电路原理及说明 (13)
4.2主电路参数设计 (13)
4.3保护电路设计 (14)
5控制及驱动电路设计 (16)
5.1调节器结构组成及说明 (16)
5.2逻辑控制器的设计 (17)
5.3触发电路设计 (19)
6 电气原理总图 (21)
7心得体会 (22)
参考文献 (23)
摘要
两组晶闸管装置反并联的电枢可逆线路是可逆调速系统的典型线路之一,这种线路有能实现可逆运行、回馈制动等优点,但也会产生环流。为保证系统安全,必须消除其中的环流。所谓逻辑无环流系统就是在一组晶闸管工作时,用逻辑电路封锁另一组晶闸管的触发脉冲,使该组晶闸管完全处于阻断状态,从根本上切断环流通路。这种系统不仅能实现逻辑无环流可逆调速,还能实现回馈制动。本文对逻辑无环流直流可逆调速系统进行了设计,并且计算了电流和转速调节器的参数。
苏州市职业大学
实训报告
名称运动控制系统实训
项目转速、电流双闭环直流调速系统的MATLAB仿真设计2012年12月31日至2013年1月4日共一周
院系电子信息工程系
班级
姓名
学号
系主任张红兵
教研室主任邓建平
指导教师叶国平
苏州市职业大学
实训任务书
课程名称:运动控制系统实训
起讫时间:2012.12.31-2013.1.4
院系:电子信息工程系
班级:
指导教师:叶国平
系主任:张红兵
目录
实训任务书 (1)
第一章绪论 (5)
1.1仿真控制技术 (5)
1.2 MATLAB与控制系统仿真 (6)
第二章转速、电流双闭环直流调速系统 (7)
2.1双闭环直流调速系统的介绍 (7)
2.2 双闭环直流调速系统的组成 (7)
2.3 双闭环直流调速系统的工作原理 (8)
2.4双闭环直流调速系统的稳态结构图 (8)
第三章 Simulink环境下的仿真 (10)
3.1 双闭环直流调速系统的仿真模型图 (10)
3.2 仿真参数设置 (10)
3.3 仿真结果及分析 (11)
第四章实训总结 (14)
参考文献 (15)
第一章绪论
1.1仿真控制技术
系统仿真作为一种特殊的试验技术,在20世纪30年代到90年代的半个多世纪中经历了飞速的发展,到今天已经发展成为一种真正的、系统的试验科学。伴随着第一台电子管电子计算机的诞生和以相似理论为基础的模拟技术的应用,仿真作为一种研究和发展新产品、新技术的科学手段,在航空、航天、造船、兵器等与国防科研相关的行业中首先发展起来,并显示了巨大的社会效益和经济效益。
随着计算机技术的发展,仿真技术逐步发展,现已形成完整的学科,渗透到各个领域,为应用系统的研究提供了强大的工具。
《运动控制系统》课程设计
1龙门刨的结构特点
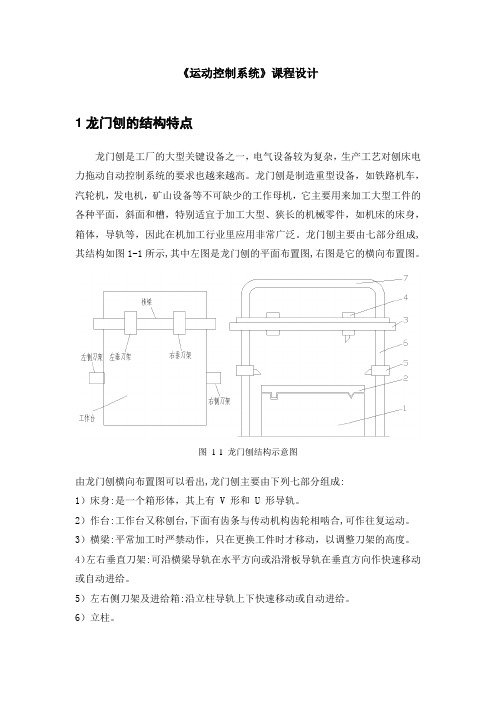
龙门刨是工厂的大型关键设备之一,电气设备较为复杂,生产工艺对刨床电力拖动自动控制系统的要求也越来越高。龙门刨是制造重型设备,如铁路机车,汽轮机,发电机,矿山设备等不可缺少的工作母机,它主要用来加工大型工件的各种平面,斜面和槽,特别适宜于加工大型、狭长的机械零件,如机床的床身,箱体,导轨等,因此在机加工行业里应用非常广泛。龙门刨主要由七部分组成,其结构如图1-1所示,其中左图是龙门刨的平面布置图,右图是它的横向布置图。
图1-1 龙门刨结构示意图
由龙门刨横向布置图可以看出,龙门刨主要由下列七部分组成:
1)床身:是一个箱形体,其上有 V 形和 U 形导轨。
2)作台:工作台又称刨台,下面有齿条与传动机构齿轮相啮合,可作往复运动。3)横梁:平常加工时严禁动作,只在更换工件时才移动,以调整刀架的高度。4)左右垂直刀架:可沿横梁导轨在水平方向或沿滑板导轨在垂直方向作快速移动或自动进给。
5)左右侧刀架及进给箱:沿立柱导轨上下快速移动或自动进给。
6)立柱。
7)龙门顶。
2 龙门刨的工艺特点
龙门刨的运动可分为主运动、进给运动及辅助运动。主运动是指工作台作连续的往返运动,进给运动是指刀架的进给,辅助运动是为了调整刀具而设的,如横梁的夹紧放松、上下移动、刀架的快速移动和抬刀等。
龙门刨的生产工艺特点是工作台与工件频繁地做往复运动。在工作行程期间抬刀电磁铁不动作,刀具是落下的为切削做准备,并且在工作台由返回行程转到工作行程的一小段时间内刀架电机使进刀机构进刀;在工作台返回行程中,抬刀电磁铁动作将刀具抬起,并且在工作台由工作行程转到返回行程的一小段时间内刀架电机使进刀机构复位。工件在加工过程中,横梁是不准移动的,只有在加工完一个工件,准备加工另一个工件时,根据工件的高矮调整刀架的高度时,才需要移动横梁。横梁运动属“点动”性质。为了保证横梁能按要求停在一定的位置上,还设有夹紧机构。