机载激光雷达(LiDAR)测量技术在公路勘测设计中的应用
- 格式:pdf
- 大小:216.08 KB
- 文档页数:2
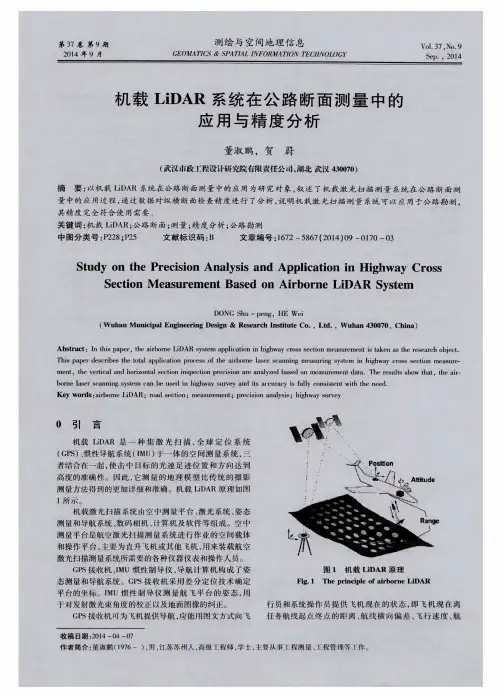
机载LIDAR系统在公路断面测量中的应用与精度分析摘要:机载LIDAR技术的发展为获取高时空分辨率的地球空间信息提供了全新的技术手段,使人们从传统的单点数据摄取变为连续自动数据获取,提高了观测的精度和速度,能够快速地摄取精确的高分辨率的数字地面模型以及地面物体的三维坐标,进而获取地表物体的垂直结构形态,同时配合地物的影像或红外成像结果,增强对地物的认识和识别能力,在公路测量测绘等领域具有广阔的发展前景和应用需求。
关键词:机载LIDAR系统;公路断面测量;精度Abstract: Airborne LIDAR technology to obtain high spatial and temporal resolution of geo-spatial information provides a new technical means, so that people from the traditional single-point data ingest becomes continuous automatic data acquisition, improve accuracy and speed of observation, can intake of fast accurate and high-resolution digital terrain model of the three-dimensional coordinates of objects on the ground, and then ground to obtain a vertical structure of the object shape, in conjunction with the feature of the image or infrared imaging result, enhance the awareness and the ability to identify the feature in the Highway Surveying mapping and other areas has broad prospects for development and application requirements.Keywords: airborne LIDAR system; road cross-section measurement; accuracy一引言机载激光扫描测量技术是激光测距技术、计算机技术、高精度动态载体姿态测量技术(INS)和高精度动态GPS差分定位技术迅速发展的集中体现。
阐述Lidar系统在二广高速某路段勘测中的应用摘要:激光雷达测量(Lidar)作为航测法的一种发展既继承了传统航测法的优点,又使测图精度得到了提高。
本文对激光雷达测图技术进行了简单阐述并对利用激光雷达在二广高速某路段所测1:2000地形图进行了精度分析。
关键词:Lidar系统、滤波、内插、精度。
1引言Lidar系统(Light detection and ranging)是一种集全球定位系统(GPS)、惯性导航系统(INS)、激光扫描仪、数码相机等光谱成像设备与一身的系统。
LIDAR 系统应用多光束返回采集高程,数据密度可达到常规摄影测量的三倍,其高程数据精度不受航高限制,比常规摄影测量更具优越性。
可提供理想的数字高程模型DEM。
激光雷达的应用使测图工作既节省了人力物力,也提高了效率。
2方法实施激光高程点处理过程可以将其归结为三个步骤:1、原始数据的获取;2、地面点三维数据的计算和转换;3、数据处理。
2.1原始数据获取在扫描过程中激光扫描仪发射激光脉冲,并接受到由探测目标反射回来的脉冲信号,从而得到探测目标的距离、坡度、粗糙度和反射率等信号。
数码相机对地面进行拍摄得到地面影像。
其扫描方式按照光束在地面上的形状和轨迹间隔可分为平行扫描方式、“之”字形扫描方式和近椭圆扫描方式,如图1。
平行扫描方式之字形扫描方式近椭圆扫描方式图1在激光扫描获取原始数据过程中,激光的扫描方式直接影响到激光数据的点云密度。
当方式合适其点云密度旁向可达0.3m以下,航向间距可达0.8m以下。
在实际操作中应根据情况选择适合的扫描方式和各项参数,这样在经过后期的滤波和内插计算之后,就可以得到足够密的点云数据。
与此同时,全球定位系统(GPS)、惯性导航系统(INS)就负责实时的获取扫描仪和数码相机的位置(X、Y、H)和方位(滚动角、俯仰角、航偏角)。
最终得到两类数据:一类就是有所得到的目标物的距离、坡度、粗糙度和反射率等信号以及拍摄的地面影像。
无人机机载LiDAR航测技术道路测绘应用效果分析摘要:随着无人机空中航测设备的不断完善,无人机航测技术也将广泛应用于各行各业。
目前的无人机航测主要包括使用配备高清镜头的无人机从多个角度生成高清图像,使用高清点云投影算法生成实景3D模型,用实景3D模型标记地形,设计布局计划,并进行实景模型测量。
这种传统的无人机航测技术通过高清镜头进行数据采集,对于测绘精度的要求,测绘面积相对较小,植被率较低,在技术应用领域相对较好,但对于相对较高的植被覆盖率,测绘精度满足线性工程师的要求,传统航测很难达到项目的精度要求。
因此,研究激光雷达技术如何以更高的航测精度,以完成测绘任务成为研究的重点。
关键词:无人机;机载雷达;道路测绘LIDAR技术是近二十年来摄影测量与遥感领域具有革命性的成就,随着空间数据的使用越来越多,对准确可靠的空间数据的需求也在增加。
由于生产周期长,成本高,数据采集密度低,传统的摄影测量无法满足现代信息社会的要求,LIDAR是一种快速准确的地面3D数据技术。
一、LIDAR系统概述激光雷达(LIDAR)是LIGHR DETECTION AND RANGING的缩写,即激光探测与测量系统。
它使用单个激光脉冲来测量从激光源到目标和返回激光接收器的时间,同时结合飞机传感器的定位和方位数据来精确测量(目标)的三维坐标。
1.系统工作原理。
机载LIDAR是一个激光测距,测量传感器到位置的距离,而高精度星座观测系统(IMU)测量主扫描轴的正空间参数。
全球定位系统(GPS)是一种高分辨率的数码相机,它捕获与地面相对应的彩色数字图像,以确定扫描中心的空间位置,从而产生正射影像。
2.测量原理。
包括单束窄带激光器和接收系统,它产生光脉冲,向物体发送,最终反射接收器接收的物体。
光接收器精确测量光脉冲和反射之间的时间。
由于光脉冲以光速传播,因此接收器始终接收先前反射的脉冲,直到下一次脉冲调整发生。
由于光速是已知的,因此运动时间可以转换为距离测量。
机载激光雷达(LiDAR)测量在公路三维测设中的应用探究机载激光雷达(LiDAR)测量技术融合了多种先进技术,在公路三维测设中发挥着更大的作用。
基于此,本文分析了机载激光雷达(LiDAR)测量的技术的使用优势,阐述了辅助地面控制测量、采集参数的选择、横断面的采集、DOM、DEM、DLG的制作这些机载激光雷达(LiDAR)测量技术在公路三维测设中的应用。
标签:机载激光雷达(LiDAR)测量;公路;三维测设作为一种新型的空间测量技术,机载激光雷达(LiDAR)测量技术融合了全球定位系统(GNSS)、激光扫描、摄影测量、惯性导航系统(IMU)等技术,能够更加准确的、快速的完成地表三维空间信息的收集。
可以说,机载激光雷达(LiDAR)测量技术是继GPS技术后的又一次三维测绘技术进步。
经过实践能够发现,机载激光雷达(LiDAR)测量技术能够更加高效的获取地面精密数字地面模型,在公路三维测设中发挥着重要的作用。
一、机载激光雷达(LiDAR)测量的技术分析(一)机载激光雷达(LiDAR)测量技术的使用优势分析对于机载激光雷达(LiDAR)测量技术来说,其融合的多种先进技术,在公路三维测设中有着更好的使用有优势。
机载激光雷达(LiDAR)测量技术主要有以下几种使用优势:第一,数据密度相对较高。
机载激光点云的采集间距相对较小,一般在0.8-1.2米之间。
结合实际的需求该间距可以更小。
在这样的采集条件下,数据密度显著提升,在真实地面高程模型的建立中有着极大的优势。
而在传统的DTM测量中,平均点的间距在25米左右。
可知,机载激光雷达(LiDAR)测量技术有着更高的数据密度。
第二,精确度相对较高。
对于机载激光点云数据来说,其获取都是激光测量直接完成的。
理论上,机载激光雷达(LiDAR)测量技术的高程精度可以达到0.1米;平面精度可以达到0.15米。
而在传统的航测中,理论上的高程精度为0.3-0.5米。
第三,空三定位更为先进。
关于LiDAR技术在山区道路勘察测量中的应用摘要:山区公路勘察过程中常规测量方法困难,利用lidar技术有效控制工期及测绘成果质量关键词:山区公路勘察常规测量方法困难 lidar技术1、前言在山区公路勘察过程中,线路所经范围大多由于地形复杂,测绘人员无法到达,给常规勘测方法和手段带来极大困难。
以重庆巫溪县至陕西镇平县高速公路为例,路线经过区域地貌以山地为主,山地占95%以上,个别路段山势陡峭;地形为南低北高,绝对高差达2000米,属典型的中深切割中山地形,按传统勘测方法,很难按时保质的要求完成前期基础资料测绘工作,尤其是设计用1:2000或更大比例尺地形成果图及路线和结构物纵横断面测绘。
为了解决上述问题,拟采用目前技术最先进国内较成熟的能实时获取地形表面三维空间信息和影像的航空遥感新技术即机载三维激光雷达扫描(简称lidar)勘测新技术。
与传统遥感技术相比较具有自动化程度高、受天气影响小、数据生产周期短、精度高等技术特点。
2 、lidar 技术原理lidar系统通常由以下部分组成:pos系统,传感器系统,采集管理系统,存储与控制系统。
其中pos系统由gps定位系统和imu 惯性导航系统组成。
gps定位系统通过差分精确测定传感器的空间位置,imu惯性导航系统精确记录飞行姿态,激光传感器通过计算激光回波时间,精确记录传感器与地物回波点之间的距离,由此可直接测量地面及地物各个点的三维坐标。
使用激光进行距离量测可大大提高了数据采集的可靠性和抗干扰能力。
当来自激光器的激光射到一个物体的表面时,其中一部分光会反射回去,被激光雷达所配备的接收器所接收。
当仪器计算出光由激光器射出到返回到接收器的时间为2t后,那么激光器到反射物体的距离d=光速(c)×时间(t),结合gps得到的激光器位置坐标信息, imu得到的激光方向信息,就可以准确地计算出每一个激光点的大地坐标 (x,y,z),大量的激光点聚集成激光点云,组成点云图像,这就是机载激光雷达的测高原理。
研究公路勘察设计中的机载激光雷达测量技术现代公路的范围越来越广泛,经常需要在复杂的地质环境中建设公路,这增加了公路勘查设计难度。
基于此,在公路勘查设计过程中,要加强对机载激光雷达技术的应用,从而提高公路勘查设计质量,从而提高公路的整体质量,为人们提供更加稳定、良好的交通环境。
标签:公路;勘察设计;机载激光雷达机载激光雷达(LIDAR)兴起于二十世纪九十年代,是一门新兴的遥感技术,其发展至今,已经约有30年历史。
近几年,我国相关学者对LIDAR技术进行了研究,并且加强了对相关设备的投入使用,从实际应用情况来看取得了不错的成绩,但是仍然存在一定问题,因此要加强对相应内容的研究与分析。
1、LIDAR技术特点LIDAR系统与机载GPS、惯性导航系统INS剂CCD合理结合,可以实现对空间的精准定位。
在具体测距过程中,采用激光方式,其与常规航空摄影测量相比,优点主要体现在以下几个方面:(1)在测量过程中,不会因为太阳角度和阴影温度对高程的精度造成不良影响,并且不会受航高限制。
(2)产品更加多样化,在具体作业中具有更多的选择性。
(3)通过测量可以获取更多的地面信息。
(4)外界作业量少,提高了工作效率。
机载LIDAR系统为综合航摄影响和空中数据定位而设计,因此在作业过程中,可以为工程应用和数字制图提供快速精准的地面模型数据和高分辨率数字的正摄影[1]。
一般来说,在作业过程中,应用LIDAR系统,获取数据的平均精准度可以能够达到0.5m,在高程方面的精准度能够达到0.3m,地面间采集点的间隔不超过1.5m。
2、LIDAR测量技术中的重点问题分析2.1 飞行设计飞行设计是激光雷达航测过程中的一项关键环节,做好该项设计是确保LIDAR技术在共公勘察设计中能够发挥出良好作用的基础,在整个作业过程中,要确保采集到的各项数据的准确性,保证数据成果精度能够达到要求标准。
飞行设计前应当本着经济、安全、高效等原则,将项目成果数据作为追求的主要目标,对地貌、地形等内容进行详细分析,结合LIDAR设备本身的特点,确定合理的飞行参数,从而确保能够获取高质量的数据。
08机载激光雷达技术在公路勘察设计中的应用研究机载激光雷达技术是一种基于光电子技术和激光技术的先进勘察测量技术,通过激光束的发射和接收来获取地面或目标物体的三维信息。
在公路勘察设计中,机载激光雷达技术主要应用在以下几个方面。
首先,机载激光雷达技术可以用于获取公路的地形和地貌信息。
激光雷达通过发射激光束,通过测量激光束的回波时间和强度,可以精确地获取地面的高程信息以及地面的形态信息。
这对公路的线路规划和设计非常重要,可以帮助工程师更好地选择适宜的线路,减少地形起伏的影响,并通过精确的高程信息来进行公路的纵向设计。
其次,机载激光雷达技术还可以用于获取公路附近的建筑物和其他目标物体的三维信息。
机载激光雷达通过扫描周围环境,可以获取建筑物的高程、轮廓和立体图像,并能够识别出其他杂物、树木等物体的分布情况。
这对公路在设计和施工过程中的避让规划非常重要,可以帮助工程师在设计时避免与建筑物和其他目标物体的冲突,确保公路的畅通和安全。
再次,机载激光雷达技术可以用于公路的表面质量检测。
激光雷达可以快速扫描公路表面,获取路面的平整度、坡度和横向坡度等信息,并能够检测出公路表面的损坏和裂缝情况。
这对公路的维护和修复非常重要,可以帮助工程师及时发现公路表面的问题,进行维护和修复工作,保证公路的安全和舒适性。
另外,机载激光雷达技术还可以应用于公路的交通流量监测和智能交通管理。
激光雷达可以通过识别车辆和行人等目标物体,获取其位置、速度和数量等信息,从而实现对公路交通流量的实时监测和分析。
这对于交通管理部门来说非常重要,可以帮助他们了解交通状况,优化交通流量,提升公路的通行效率。
综上所述,机载激光雷达技术在公路勘察设计中具有广泛的应用。
通过获取地形和地貌信息、建筑物和其他目标物体的三维信息、公路表面质量检测以及交通流量监测和智能交通管理等方面的应用,可以为工程师和交通管理部门提供准确、全面和及时的数据支持,帮助他们做出科学决策,提高公路勘察设计和交通管理的效率和质量。
测绘与空间地理信息GEOM477CS & SE47Z4厶 INFOR 胚477ON TECHNO 厶OGY第44卷第6期2021年6月Vol.44, No.6Jun. , 2021无人机载激光雷达在公路勘测设计中的应用顾鹏飞,刘文文,李啥(河南省交通规划设计研究院股份有限公司,河南郑州450000)摘要:针对山区地形复杂、植被茂密,采用传统的测量手段进行高速公路勘测设计较为困难,且工期长的实际,本文提出了一种基于无人机载激光雷达技术的山区高速公路勘测设计的应用技术流程。
该技术流程在河南济源沿太行高速公路勘测设计中得到应用,验证了其可行性及精度,表明无人机载激光雷达在山区高速公路勘测设计中能够提高生产效率及精度,节约成本。
关键词:无人机;机载激光雷达;高速公路;勘测设计 中图分类号:P25 :TB22文献标识码:A 文章编号:1672-5867(2021)06-0177-04Application of UAV Laser Radar in Survey and Design of ExpresswayGU Pengfei , LIU Wenwen , LI Han(He'nan Provincial Communications Planning & Design Institute Co., Ltd., Zhengzhou 450000, China )Abstract :In view of the complex terrain and dense vegetation in mountainous areas , it is difficult to use traditional survey methods tosurvey and design highways, and the construction period is long. This paper proposes an application technology process of survey and design of mountainous highways based on UAV laser radar technology. The technical process has been applied in the survey and designof Taihang expressway in Jiyuan , He'nan Province , and its feasibility and accuracy have been verified. It shows that the UAV lidar can improve the production efficiency and accuracy and save costs in the survey and design of mountainous expressway.Key words : UAV ; LiDAR ; expressway ; survey and design0 引 言我国高速公路建设发展迅速,尤其在山区不断规划 新的路线,高速公路的设计复杂程度也不断提高,因而将 新的技术手段引入高速公路勘测设计中一直都是相关工 作人员研究的方向。
航空LiDAR技术在道路勘测设计中的应用航空LiDAR技术在道路勘测设计中的应用引言航空LiDAR技术是一种基于激光雷达原理的遥感技术,可以高效、精确地获取地面地物的三维信息。
在道路勘测设计中,航空LiDAR技术得到了广泛的应用,可以大大提高道路勘测设计的效率和准确性。
本文将介绍航空LiDAR技术在道路勘测设计中的应用,并探讨其优势和挑战。
一、航空LiDAR技术的原理和特点航空LiDAR技术是利用激光器向地面发射激光束,通过接收器接收激光反射回来的信号来获取地面地物信息的一种遥感技术。
它具有以下几个特点:1. 高精度:航空LiDAR技术可以实现亚米级的测量精度,对地面地物进行高分辨率的获取。
2. 高效率:航空LiDAR技术可以在较短的时间内获取大面积的地物信息,大大提高了勘测设计的效率。
3. 非接触性:航空LiDAR技术可以在无需接触地面的情况下获取地物信息,减少了勘测中对地面的干扰。
二、航空LiDAR技术在道路勘测设计中的应用1. 地形测量:航空LiDAR技术可以快速、准确地获取地形信息,包括地面高程、地物高度等,为道路的规划和设计提供了重要数据。
2. 道路检测与测量:航空LiDAR技术可以快速检测和测量道路的宽度、纵坡、横坡等参数,提供精确的道路宽度和曲线数据。
3. 障碍物检测:航空LiDAR技术可以实现对道路两边的建筑物、树木等障碍物进行三维建模和检测,提供道路设计中障碍物的位置和高度信息。
4. 可视性分析:航空LiDAR技术可以进行可视性分析,评估道路在不同地形和环境条件下的可视性,为道路设计提供参考。
5. 环境影响评估:航空LiDAR技术可以获取道路周围的环境信息,包括植被覆盖、水体分布等,用于进行道路建设对环境的影响评估。
三、航空LiDAR技术的优势和挑战航空LiDAR技术在道路勘测设计中具有明显的优势,但也面临一些挑战。
1. 优势:(1)高效、高精度:航空LiDAR技术可以快速获取大面积的高精度数据,大大提高了勘测设计的效率和准确性。
R o a d e n g in e e r in g道路工程鬱机载激光雷达技术在山区公路 中的应用王涛(广西交通设计集团有限公司,广西南宁530029)摘要:机载激光雷达技术是集激光扫描、全球定位系统(GPS)、惯性导航系统(INS)、)多种技术于一体的空间 技术,具 高、精度高、成 、安全 点。
文章结合 马高速公路工程 ,机载 达技术的主要特点和工作流程,技术在 马高速公路勘察设 的具体应用方法与 。
关键词,公路#几载激光雷达技术;勘察设计;应用中图分类号,U412 文献标识码:A DOI: 10. 13282/ki.wccst.2018. 04.010文章编号:1673- 4874(2018)04-0038- 05Application of Airborne Laser Radar Technology in M ountain Highway Survey and DesignWANG Tao(Guangxi Communications Design Group Co.,Ltd.,Nanning,Guangxi,530029)Airborne laser radar technology is a space measurement technology integrating laser scanning,global positioning system (G P S), inertial navigation system (IN S), photogrammetry and manyother technologies.lt has manyfeatures such as high efficiency,high precision,rich results,and measurement bining the example of Hezhou-Bama Expressway project, this article introducedthe main characteristics and working flow of airborne laser radar technology, and described the speci--ic application methods and effects of this technology in the survey and design of Hezhou-Bama Expressway.Highway;Airborne laser radar technology;Survey and design;Application〇引言目前,公路建设 面临工 、建设环境复杂等问题。
Lidar在公路勘测中的制图应用及精度分析摘要:首先介绍了机载激光雷达技术(LiDAR)的技术特点,并与传统的航空摄影测量技术进行了比较,在此基础上介绍了适合公路工程勘察设计的机载激光雷达测绘产品制作的工艺流程,并通过项目实例对LiDAR测绘产品进行了制图精度分析,提出相应提高精度的措施。
关键词:机载激光雷达;公路;勘测设计;制图精度1、引言机载激光雷达测量(LiDAR)技术作为一种国际领先的数据获取技术,完全不同于传统的航空摄影测量作业模式,它通过激光测距直接获取地面的三维坐标,从而为快速建立精准的数字地面模型创造了条件,能够缩短地形图成图周期,断面和工点测量更加快捷方便,在植被茂密、沙漠戈壁、高山峡谷等地区具有明显的优势。
本文通过近年来我单位利用机载LiDAR技术在公路工程勘察设计中的应用实例,从与常规航空摄影技术优劣性比较,生产的主要产品类型精度进行分析,并提出了相关提高制图精度的各项措施。
2机载LiDAR技术特点2.1与传统航空摄影测量比较机载LiDAR测量技术与传统的航空摄影测量技术是相辅相成的,主要的技术不同处见表1:2.2机载LiDAR技术优点机载LiDAR直接获取的具有三维坐标信息的点,包含回波和强度信息,具有很高的高程信息,有利于地形细节的表达,经过滤波处理后的数据可以构建高质量的数字高程模型,为勘察设计工点图绘制、断面提取、三维设计提供高精度数据源。
2.3机载LiDAR技术缺点较传统数码影像飞行效率较低,摄影成本较高,制图工序较传统摄影测量多,机载激光雷达系统的误差源较多,误差传播模型更为复杂,点云滤波分类算法不是特别成熟,有些地形特征关键点容易缺失。
3机载激光雷达测量技术测制测绘产品工艺流程通过对多个工程项目的试验研究,总结出适合工程勘察设计的机载LiDAR技术内外业全流程的航测制图方法,工作流程主要包括接受任务—>技术设计书及策划书的编写—>航摄资料准备—>航带设计—>机场,航摄飞机选择,机载LiDAR设备安装调试—>航空摄影—>POS数据解算—>刺点片调绘片制作—>基础控制测量—>检校场测量—>像控点测量、地物调绘—>相机、激光检校—>空三加密—>激光点云分类—>地形图数据采集与编辑—>工点图绘制—>横纵断面图—>三维虚拟现实数据—>成果检查与验收等工序,具体见图1.1机载LiDAR技术航测制图流程图。
LiDAR论文:机载激光雷达技术在铁路勘察设计中的应用及效益分析摘要:机载激光雷达技术(LiDAR)是一种全新的遥感技术,因其高精度和高效率,在地形测绘方面得到快速发展,目前国内已有近20套LiDAR 系统。
本文主要研究LiDAR技术在铁路勘察设计工程中的应用内容、产品与效果,在此基础上与传统的航空摄影测量方法进行了比较,证明LiDAR技术在铁路勘察设计的可行性与优越性。
关键词:LiDAR;铁路勘察设计,DEM;DLG Airborne LIDAR Technology in Railway Survey and Design Application and Benefit Analysis Han Zujie (Railway Third Survey and Design Institute Group Co.,Ltd.,Tianjin300142,China) Abstract:Airborne laser radar technology (LiDAR) is a new remote sensing technology,because of its high precision and efficiency,in terms of rapid development of topographic mapping,currently nearly 20 sets of LiDAR systems.This paper studies LiDAR technology in railway engineering survey and design the content,products,and effects,on the basis of aerial photogrammetry and traditional methods are compared to prove LiDAR technology in the railway survey and design of the feasibility and superiority. Keywords:LiDAR;Railway survey and design;DEM;DLG 一、引言机载激光雷达技术(LiDAR)是一种全新的遥感技术,自上世纪90年代在德国首次出现商用样机系统以来,因其高精度和高效率,在地形测绘方面得到快速发展。