《射线的吸收》报告
- 格式:docx
- 大小:93.85 KB
- 文档页数:5

实验3:伽马射线的吸收实验目的1. 了解γ射线在物质中的吸收规律。
2. 测量γ射线在不同物质中的吸收系数。
3. 学习正确安排实验条件的方法。
内容1. 选择良好的实验条件,测量60Co (或137Cs )的γ射线在一组吸收片(铅、铜、或铝)中的吸收曲线,并由半吸收厚度定出线性吸收系数。
2. 用最小二乘直线拟合的方法求线性吸收系数。
原理1. 窄束γ射线在物质中的衰减规律γ射线与物质发生相互作用时,主要有三种效应:光电效应、康普顿效应和电子对效应(当γ射线能量大于1.02MeV 时,才有可能产生电子对效应)。
准直成平行束的γ射线,通常称为窄束γ射线。
单能的窄束γ射线在穿过物质时,其强度就会减弱,这种现象称为γ射线的吸收。
γ射线强度的衰减服从指数规律,即xNxeI eI I r μσ--==00 ( 1 )其中I I ,0分别是穿过物质前、后的γ射线强度,x 是γ射线穿过的物质的厚度(单位为cm ),r σ是三种效应截面之和,N 是吸收物质单位体积中的原子数,μ是物质的线性吸收系数(N r σμ=,单位为1=cm )。
显然μ的大小反映了物质吸收γ射线能力的大小。
由于在相同的实验条件下,某一时刻的计数率n 总是与该时刻的γ射线强度I 成正比,因此I 与x 的关系也可以用n 与x 的关系来代替。
由式我们可以得到 x e n n μ-=0 ( 2 )㏑n=㏑n 0-x μ ( 3 )可见,如果在半对数坐标纸上绘制吸收曲线,那末这条吸收曲线就是一条直线,该直线的斜率的绝对值就是线性吸收系数μ。
由于γ射线与物质相互作用的三种效应的截面都是随入射γ射线的能量γE 和吸收物质的原子序数Z 而变化,因此单能γ射线的线性吸收系数μ是物质的原子序数Z 和能量γE 的函数。
p c ph μμμμ++= ( 4 )式中ph μ、c μ、p μ分别为光电、康普顿、电子对效应的线性吸收系数。
其中5Zph ∝μZ c ∝μ ( 5 )2Zp ∝μ图2给出了铅、锡、铜、铝对γ射线的线性吸收系数与γ射线能量的关系曲线。

γ射线的吸收实验报告实验报告:γ射线的吸收实验一、实验目的通过实验探究γ射线的吸收规律,分析各种不同物质对γ射线吸收的影响。
二、实验原理γ射线是一种能量很高的电磁辐射,对物质有很强的透射能力。
当γ射线通过不同物质时,会发生吸收现象,即射线的强度会发生变化。
主要影响γ射线吸收的因素包括物质的厚度、密度、原子序数等。
实验中通过改变不同材料的厚度和密度,来研究γ射线吸收规律。
三、实验器材和试剂1.γ射线源:用于发射γ射线的辐射源。
2.安全屏蔽装置:用于屏蔽γ射线的辐射。
3.各种材料:如不同厚度和密度的铅片、铝片等。
四、实验步骤1.取一块铝片作为基准样品,记录γ射线源发出的射线强度。
2.依次将铅片放在铝片上,每次增加一块铅片并记录射线强度,直到达到一定厚度。
3.记录各个厚度下的射线强度,计算吸收率。
4.将铝片和不同厚度的铅片放在γ射线源和探测器之间,记录射线强度和各种材料的厚度、密度。
5.分析各个实验结果,总结出γ射线的吸收规律。
五、实验数据和结果实验结果如下表所示:材料,厚度(cm),密度(g/cm³),射线强度(cps):-----,:--------:,:----------:,:------------:铝片,0,2.7,600铝片+铅片,0+0.5,11.3,500铝片+铅片,0+1.0,11.3,300铝片+铅片,0+1.5,11.3,100铝片+铅片,0+2.0,11.3,50铝片+铅片,0+2.5,11.3,20根据实验数据,可以绘制γ射线强度与不同厚度材料的关系图。
根据实验数据和图表分析可得到结论:随着铅片厚度的增加,γ射线的吸收率逐渐增大,射线强度逐渐减小。
当铅片厚度超过2.5cm时,射线强度已经变得非常弱。
六、讨论和分析1.实验结果符合γ射线的吸收规律。
厚度越大,吸收率越高。
2.实验中使用了铝片作为基准样品,因为铝对γ射线的吸收相对较低,便于观察强度的变化。
铅作为一种重金属,对γ射线有较高的吸收能力,可以用于改变吸收率。
实验1.3 射线的吸收实验时间:2010年10月21日【摘要】实验中我们分别探究了γ射线在铜,铝,铅中的吸收规律。
通过这次实验我们希望了解γ射线在物质中的吸收规律,同时掌握测量γ吸收系数的基本方法。
【引言】γ射线在穿透物质时,会被物质吸收,吸收作用的大小用吸收系数来表示。
物质的吸收系数的值与γ射线的能量有关,也与物质本身的性质有关。
正确测定物质的吸收系数,在核技术的应用与辐射防护设计中具有十分重要的意义。
例如工业上广泛应用的料位计、密度计、厚度计,医学上的γ照相技术等都是根据这一原理研究设计的。
【关键词】铜 铝 铅γ射线 吸收【正文】一、 实验原理1.窄束 射线在物质中的吸收规律。
γ射线在穿过物质时,会与物质发生多种作用,主要有光电效应,康普顿效应和电子对效应,作用的结果使γ射线的强度减弱。
准直成平行束的γ射线称为窄束γ射线,单能窄束γ射线在穿过物质时,其强度的减弱服从指数衰减规律,即:其中I 0为入射γ射线强度,I x 为透射γ射线强度,x 为γ射线穿透的样品厚度,μ为线性吸收系数。
用实验的方法测得透射率T=I x /I 0与厚度x 的关系曲线,便可根据(1)式求得线性吸收系数μ值。
为了减小测量误差,提高测量结果精度。
实验上常先测得多组 I x 与x 的值,再用曲线拟合来求解。
则:ln I x =ln I 0−μx (2)由于γ射线与物质主要发生三种相互作用,三种相互作用对线性吸收系数μ都有贡献,可得:μ=μph +μc +μp (3)式中μph 为光电效应的贡献, μc 为康普顿效应的贡献,μp 为电子对效应的贡献。
它们的值不但与γ光子的能量E r 有关,而且还与材料的原子序数、原子密度或分子密度有关。
对于能量相同的γ射线不同的材料、μ也有不同的值。
医疗上正是根据这一原理,来实现对人体内部组织病变的诊断和治疗,如x 光透视,x 光CT 技术,对肿瘤的放射性治疗等。
图1表示铅、锡、铜、铝材料对γ射线的线性吸收系数μ随能量E变化关系。

伽马射线的吸收实验分析报告伽马射线是一种高能电磁辐射,它具有较强的穿透能力和高能量。
为了研究伽马射线在物质中的吸收特性,我们进行了一系列的实验,并对实验结果进行了详细的分析。
实验目的:1.研究伽马射线在不同物质中的吸收情况;2.了解伽马射线的穿透能力和吸收特性;3.探究伽马射线吸收实验的应用价值。
实验装置:1. 伽马射线源:选用共振核素Cesium-137 (Cs-137)。
2.探测器:采用闪烁体探测器,记录伽马射线的强度变化。
3.不同材料:如铅、铝、聚乙烯等具有不同密度和原子序数的材料。
实验步骤:1.将伽马射线源定位在一定距离的位置上,探测器放置在伽马射线源的背面,预留一定的触发时间。
2.依次将铅、铝和聚乙烯等材料放置在伽马射线源和探测器之间,记录不同材料下的伽马射线强度。
3.根据伽马射线的强度变化情况,分析不同材料对伽马射线的吸收程度。
实验结果与分析:我们进行了三组实验,分别使用了铅、铝和聚乙烯作为吸收材料。
我们记录了不同材料下伽马射线的强度变化情况。
首先,当伽马射线通过铅材料时,我们观察到伽马射线的强度明显减弱。
这是因为铅具有较高的密度和原子序数,能够对伽马射线产生较强的吸收作用。
所以,铅是一种比较好的屏蔽伽马射线的材料。
其次,当伽马射线通过铝材料时,尽管铝的密度较低,但其原子序数较高,对伽马射线也有一定的吸收作用。
与铅相比,铝的吸收效果较弱。
这可能是因为伽马射线的穿透能力与其能量有关,而铝的原子序数相对较小,无法有效吸收高能伽马射线。
最后,当伽马射线通过聚乙烯材料时,我们观察到伽马射线的强度几乎没有明显的减弱。
这是因为聚乙烯的密度较低,原子序数也很小,无法有效吸收伽马射线。
因此,聚乙烯对伽马射线的屏蔽效果很差。
通过对实验结果的分析,我们可以得出以下结论:1.伽马射线的穿透能力与所穿过材料的密度和原子序数有关。
密度和原子序数较大的材料对伽马射线具有较强的吸收能力。
2.铅是一种较好的屏蔽伽马射线的材料,其吸收能力远远高于铝和聚乙烯。
实验报告学院名称:国防科技学院专业名称:学生姓名:学号:指导教师:席发元讲师二〇一三年十二月γ射线在物质中的吸收1.实验的目的和意义γ射线的测量在核辐射探测工作中占有非常重要的地位。
例如,在核物理研究中,测量原子核激发能级、核衰变纲图、短核的寿命以及进行核反应实验等都离不开γ射线的测量;同时,在放射性矿石分析、测定堆燃料元件的燃耗、实现某些裂变产物的流线分析以及在环境保护工作中分析污染物成分或进行活化分析等也都离不开γ射线的测量。
因此,研究γ射线与物质的相互作用、γ射线在物质中的衰变规律、吸收物质的吸收系数以及学习γ射线探测器的使用等就显得特别重要。
当γ射线穿过物质时,其注量率(单位时间内进入单位截面积小球的粒子数)将逐渐衰减。
对于单能窄束γ射线,在物质中符合负指数衰减规律。
本实验利用放射性核素137Cs衰变产生的γ光子(能量0.662 MeV),经准直器准直后,通过观察γ探测器上(手持式γ中子搜寻仪)的计数率的变化,研究其在不同物质中的衰减规律,计算出不同物质的吸收系数。
本实验的目的是学习γ探测器(手持式γ中子搜寻仪)的工作原理和使用方法;并在此基础上,利用γ中子搜寻仪验证单能窄束γ射线在穿过物质时遵守指数衰减规律,并由此计算出各吸收物质的吸收系数。
通过实验要求学生掌握以下知识:1.学习γ中子搜寻仪的调节和使用方法2.学会手工和电脑绘制物质厚度-计数的关系曲线3.掌握物质吸收系数的测量和计算方法4.比较不同吸收物质间吸收曲线的差异2.实验原理(1)γ射线的吸收当γ射线穿过物质时,γ射线与物质相互作用的主要三种形式:光电效应、康普顿效应和形成电子对效应。
这三种主要作用形式发生的几率(反应截面)与光子能量、吸收物质的原子序数如图8.1所示。
一般来说,低能量的光子与物质作用的主要形式是光电效应;中等能量的光子与物质作用的主要形式是康普顿效应;高能量的光子与物质作用的主要形式是形成电子对效应。
(2)窄束当γ射线穿过一定厚度的物质时,有些与物质发生了相互作用,有些则没有。
物质对β射线的吸收试验报告04级11系 姓名:徐文松 学号:PB04210414 日期:2006.03.17物质对β射线的吸收学习和掌握与物质对射线吸收的有关知识和实验方法,测量吸收曲线并求出β射线的射程和最大能量。
同时进一步加深对计数管、定标器等仪器的了解。
当一定能量的β射线(即高速电子束)通过物质时,与该物质原子或原子核相互作用,由于能量损失,强度会逐渐减弱,即在物质中被吸收。
电子与物质相互作用的机制主要有三种:第一,电子与物质原子的核外电子发生非弹性碰撞,使原子激发或电离,电子以此种方式损失能量称为电离损失。
电离损失的能量损失可由下式给出:⎥⎦⎤⎢⎣⎡--=⎪⎭⎫⎝⎛-2329.12ln 4224I mv NZ mv e dx dE ion π (1)此式适用于非相对论情况,式中v 为电子速度,N 、Z 、I 分别为靶物质单位体积内的原子数、原子序数、平均激发能。
由此看出,电离损失的能量与入射电子的速度、物质的原子序数、原子的平均激发能等因素有关。
第二,电子受物质原子核库仑场的作用而被加速,根据电磁理论作加速运动的带电粒子会发射电磁辐射,称为轫致辐射,使电子的部分能量以X 射线的形式放出,称为辐射损失。
这主要在能量较高的电子与物质相互作用时发生。
辐射损失NE mZ dx dE rad 22∝⎪⎭⎫⎝⎛- (2)式中m 、E 分别为入射电子的质量、能量,Z 、N 分别为靶物质的原子序数和单位体积中的原子数。
由式(2)可以看出,β射线在物质中的辐射损失与物质的Z 2成正比,与入射电子的能量成正比。
比较(1)、(2)两式,可粗略看出入射电子的能量较低时,电离损失占优势,当电子能量较高时辐射损失占优势。
除以上两种能量损失外,β射线在物质中与原子核的库仑场发生弹性散射,使β粒子改变运动方向,因电子质量小,可能发生比较大角度的散射,还可能发生多次散射,因而偏离原射束方向,使入射方向上的射线强度减弱,这种机制成为多次散射。
百度文库•让每个人平等地捉升口我近代物理实验报告Y射线的吸收与物质吸收系数测定学班姓学时院级名号间数理与信息工程学院光信081班086201142011年04月27日Y射线的吸收与物质吸收系数u的测定班级:光信081 姓名:陈亮学号:08620114摘要:学会Nal (T1)单晶T闪烁体整套装置的操作、调整和使用;在此基础上测量137Cs和60Co 的T能谱,求出能量变化率、唸康比、线性等各项指标,并分析谱形;了解多道脉冲幅度分析器在Nal(Tl)单晶T谱测量中的数据采集及英基本功能,在数拯处理中包括对谱形进行光滑、寻峰,曲线拟合等。
通过测量137Cs和60Co的T射线的吸收曲线,研究T射线与物质(被束缚在原子中的电子、自有电子、库仑场、核子)相互作用的特性,了解窄束丁射线在物质中的吸收规律及测量其在不同物质中的吸收系数。
关键字:T射线能谱物质吸收系数U光电效应康普顿效应电子对效应引言:原子核由髙能级向低能级跃迁时会辐射射线,它是一种波长极短的电磁波,其能量由原子核跃迁前后的能级差来表示即:射线与物质发生相互作用则产生次级电子或能量较低的射线,将射线的次级电子按不同能量分别进行强度测量,从而得到辐射强度按能量的分布, 即为“能谱”。
测量能谱的装置称为“能谱仪”。
闪烁探测器是利用带电粒子或非带电粒子与某些物质的相互作用下转化成为带电粒子对物质原子的激发,从而会产生发光效应的特性来测量射线的仪器。
它的主要优点是即能测量各种类型的带电粒子,又能探测中性粒子:即能测量粒子强度,又能测量粒子能量:并且探测效率高。
Y,又称Y粒子流,是能级跃迁蜕变时释放出的射线,是波长短于0.2埃的电磁波。
首先由科学家P.V.维拉徳发现,是继(I、后发现的第三种射线。
原子和核反应均可产生丫射线。
Y射线的波长比X射线要短,所以丫射线具有比还要强的穿透能力。
当Y射线通过物质并与相互作用时会产生光电效应、和正负电子对三种效应。
原子核释放出的Y与核外电子相碰时,会把全部能量交给电子,使电子成为光电子,此即光电效应。

γ射线的吸收实验报告γ射线的吸收一、实验目的:1.了解γ射线在物质中的吸收规律。
2.掌握测量γ吸收系数的基本方法。
二、实验原理:1.窄束射线在物质中的吸收规律。
射线在穿过物质时,会与物质发生多种作用,主要有光电效应,康普顿效应和电子对效应,作用的结果使射线的强度减弱。
准直成平行束的射线称为窄束射线,单能窄束射线在穿过物质时,其强度的减弱服从指数衰减规律,即:(1)其中为入射射线强度,为透射射线强度,x为射线穿透的样品厚度,为线性吸收系数。
用实验的方法测得透射率与厚度的关系曲线,便可根据(1)式求得线性吸收系数值。
为了减小测量误差,提高测量结果精度。
实验上常先测得多组与的值,再用曲线拟合来求解。
则:(2)由于射线与物质主要发生三种相互作用,三种相互作用对线性吸收系数都有贡献,可得:(3)式中为光电效应的贡献,为康普顿效应的贡献,为电子对效应的贡献。
它们的值不但与光子的能量Er有关,而且还与材料的原子序数、原子密度或分子密度有关。
对于能量相同的射线不同的材料、也有不同的值。
医疗上正是根据这一原理,来实现对人体内部组织病变的诊断和治疗,如光透视,光CT技术,对肿瘤的放射性治疗等。
图1表示铅、锡、铜、铝材料对射线的线性吸收系数μ随能量E变化关系。
图中横座标以光子的能量与电子静止能量mc2的比值为单位,由图可见,对于铅低能射线只有光电效应和康普顿效应,对高能射线,以电子对效应为主。
为了使用上的方便,定义μm=μ/ρ为质量吸收系数,ρ为材料的质量密度。
则(1)式可改写成如下的形式:(4)式中xm=x·ρ,称为质量厚度,单位是g/cm2。
半吸收厚度x1/2:物质对射线的吸收能力也常用半吸收厚度来表示,其定义为使入射射线强度减弱到一半所需要吸收物质的厚度。
由(1)式可得:(5)显然也与材料的性质和射线的能量有关。
图2表示铝、铅的半吸收厚度与E的关系。
若用实验方法测得半吸收厚度,则可根据(4)求得材料的线性吸收系数μ值。

实验二 γ射线的吸收一、实验目的:1、了解γ射线在物质中的吸收规律;2、测量γ射线在不同介质中的吸收系数。
二、实验器材:1、KZG03C 辐射检测仪一台;2、Cs137点放射源一个;3、铅准直器一个;4、40×40×dcm3的水泥、铝、铁、铜、铅吸收屏若干块(附屏支架);5、手套、长钳夹子、尺子、绳子各一套。
三、实验原理:天然γ射线与物质相互作用的三种主要形式:光电效应、康普顿散射和形成电子对效应。
由于三种效应的结果,γ射线通过物质时发生衰减(吸收),其总衰减系数应为三者之和:实验证明,γ射线在介质中的衰减服从指数规律:de I I μ-=0,mm d e I I μ-=0μ=(- Ln(I/I O ))/d , μm =(- Ln(I/I O ))/d m式中:I 为射线经过某一介质厚度的仪器净读数(减去本底);I 0为起始射线未经过介质的仪器净读数(减去本底); d 为介质厚度,单位为cm; d m 为介质面密度,单位为g/cm 2 ;μ 为γ射线经过介质的线吸收系数,单位为cm -1;κστμ++=μm 为γ射线经过介质的质量吸收系数,单位为g/cm 2 ; 半吸收厚度:为使射线强度减少一半时物质的厚度,即021I I =时,μ2ln 21=d 或 212ln d =μ四、实验内容:1. 选择良好的测量条件(窄束),测量 Cs 137源的γ射线在同一组吸收屏(水泥、铝、铁、铜、铅)中的吸收曲线,并由半厚度定出吸收系数;2. 用最小二乘拟合的方法计算出吸收系数与1中的结果进行比较;3. 测量不同散射介质时(同一角度,同一厚度)γ射线的强度。
五、实验步骤: 1. 吸收实验1) 调整装置,使放射源、准直孔、探测器的中心在一条直线上; 2) 测量本底I 0’;3) 将源放入准直器中,测量无吸收屏时γ射线强度I 0”;4) 逐渐增加吸收屏,并按相对误差在N ±δ的要求测出对应厚度计数I d ’,每个点测三次取平均植;5) 更换一种吸收屏,重复步骤4,测量时注意测量条件不变。
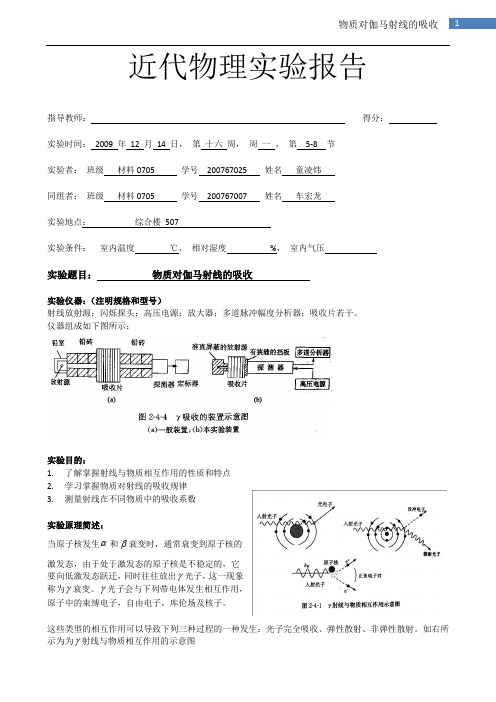
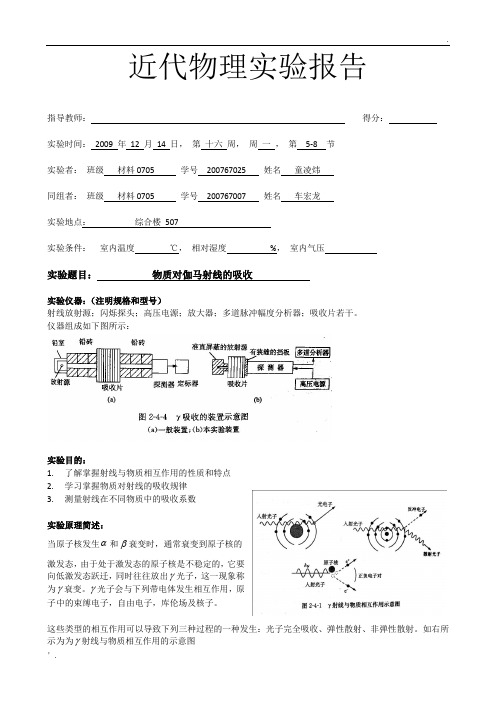
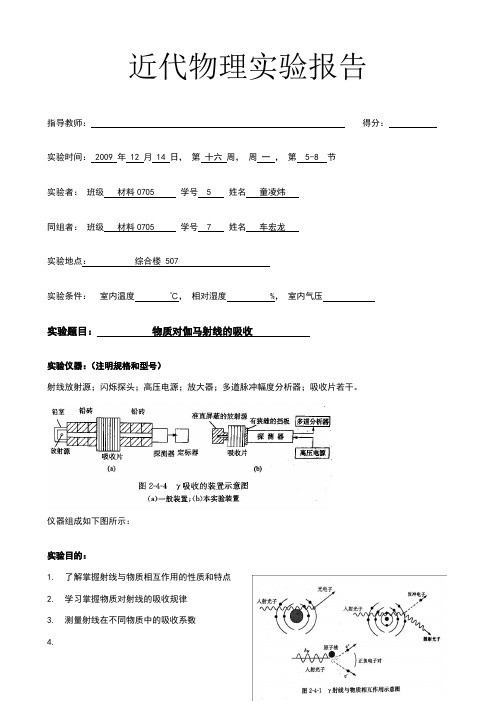
近代物理实验报告指导教师:得分:实验时间:2009 年12 月14 日,第十六周,周一,第5-8 节实验者:班级材料0705 学号200767025 姓名童凌炜同组者:班级材料0705 学号200767007 姓名车宏龙实验地点:综合楼507实验条件:室内温度℃,相对湿度%,室内气压实验题目:物质对伽马射线的吸收实验仪器:(注明规格和型号)射线放射源;闪烁探头;高压电源;放大器;多道脉冲幅度分析器;吸收片若干。
仪器组成如下图所示:实验目的:1.了解掌握射线与物质相互作用的性质和特点2.学习掌握物质对射线的吸收规律3.测量射线在不同物质中的吸收系数实验原理简述:当原子核发生α和β衰变时,通常衰变到原子核的激发态,由于处于激发态的原子核是不稳定的,它要向低激发态跃迁,同时往往放出γ光子,这一现象称为γ衰变。
γ光子会与下列带电体发生相互作用,原子中的束缚电子,自由电子,库伦场及核子。
这些类型的相互作用可以导致下列三种过程的一种发生:光子完全吸收、弹性散射、非弹性散射。
如右所示为为γ射线与物质相互作用的示意图图中的三种状况分别为: 1. 低能时以光电效应为主。
2. 光子可以被原子或单个电子散射到另一方向,其能量可损失也可不损失。
3. 若入射光子的能量超过1.02MeV ,则电子对的生成成为可能从上面的讨论可以清楚地看到,当γ光子穿过吸收物质时,通过与物质原子发生光电效应、康普顿效应和电子对效应能量损失,γ射线一旦与吸收物质原子发生这三种相互作用,原来能量为的光子就消失,或散射后能量改变、偏离原来的入射方向;总之,一旦发生相互作用,就从原来的入射束中移去。
γ射线穿过物质是,强度逐渐减弱,按指数规律衰减,不与物质发生相互作用的光子穿过吸收层,其能量保持不变,因而没有射程概念可言,但可用“半吸收厚度”来表示γ射线对物质的穿透情况。
本实验研究的主要是窄束γ射线在物质中的吸收规律。
所谓窄束γ射线是指不包括散射成分的射线束通过吸收后的光子,仅由未经相互作用或未经碰撞的光子组成。

物质对伽马射线的吸收实验报告近代物理实验报告指导教师:得分:实验时间:2009 年12 ⽉14 ⽇,第⼗六周,周⼀,第5-8 节实验者:班级材料0705 学号200767025 姓名童凌炜同组者:班级材料0705 学号200767007 姓名车宏龙实验地点:综合楼507实验条件:室内温度℃,相对湿度%,室内⽓压实验题⽬:物质对伽马射线的吸收实验仪器:(注明规格和型号)射线放射源;闪烁探头;⾼压电源;放⼤器;多道脉冲幅度分析器;吸收⽚若⼲。
仪器组成如下图所⽰:实验⽬的:1.了解掌握射线与物质相互作⽤的性质和特点2.学习掌握物质对射线的吸收规律3.测量射线在不同物质中的吸收系数实验原理简述:当原⼦核发⽣α和β衰变时,通常衰变到原⼦核的激发态,由于处于激发态的原⼦核是不稳定的,它要向低激发态跃迁,同时往往放出γ光⼦,这⼀现象称为γ衰变。
γ光⼦会与下列带电体发⽣相互作⽤,原⼦中的束缚电⼦,⾃由电⼦,库伦场及核⼦。
这些类型的相互作⽤可以导致下列三种过程的⼀种发⽣:光⼦完全吸收、弹性散射、⾮弹性散射。
如右所⽰为为γ射线与物质相互作⽤的⽰意图图中的三种状况分别为: 1. 低能时以光电效应为主。
2. 光⼦可以被原⼦或单个电⼦散射到另⼀⽅向,其能量可损失也可不损失。
3. 若⼊射光⼦的能量超过1.02MeV ,则电⼦对的⽣成成为可能从上⾯的讨论可以清楚地看到,当γ光⼦穿过吸收物质时,通过与物质原⼦发⽣光电效应、康普顿效应和电⼦对效应能量损失,γ射线⼀旦与吸收物质原⼦发⽣这三种相互作⽤,原来能量为的光⼦就消失,或散射后能量改变、偏离原来的⼊射⽅向;总之,⼀旦发⽣相互作⽤,就从原来的⼊射束中移去。
γ射线穿过物质是,强度逐渐减弱,按指数规律衰减,不与物质发⽣相互作⽤的光⼦穿过吸收层,其能量保持不变,因⽽没有射程概念可⾔,但可⽤“半吸收厚度”来表⽰γ射线对物质的穿透情况。
本实验研究的主要是窄束γ射线在物质中的吸收规律。
所谓窄束γ射线是指不包括散射成分的射线束通过吸收后的光⼦,仅由未经相互作⽤或未经碰撞的光⼦组成。
近代物理实验报告指导教师:得分:实验时间:2009 年12 月14 日,第十六周,周一,第5-8 节实验者:班级材料0705 学号200767025 姓名童凌炜同组者:班级材料0705 学号200767007 姓名车宏龙实验地点:综合楼507实验条件:室内温度℃,相对湿度%,室内气压实验题目:物质对伽马射线的吸收实验仪器:(注明规格和型号)射线放射源;闪烁探头;高压电源;放大器;多道脉冲幅度分析器;吸收片若干。
仪器组成如下图所示:实验目的:1.了解掌握射线与物质相互作用的性质和特点2.学习掌握物质对射线的吸收规律3.测量射线在不同物质中的吸收系数实验原理简述:当原子核发生α和β衰变时,通常衰变到原子核的激发态,由于处于激发态的原子核是不稳定的,它要向低激发态跃迁,同时往往放出γ光子,这一现象称为γ衰变。
γ光子会与下列带电体发生相互作用,原子中的束缚电子,自由电子,库伦场及核子。
这些类型的相互作用可以导致下列三种过程的一种发生:光子完全吸收、弹性散射、非弹性散射。
如右所示为为γ射线与物质相互作用的示意图图中的三种状况分别为: 1. 低能时以光电效应为主。
2. 光子可以被原子或单个电子散射到另一方向,其能量可损失也可不损失。
3. 若入射光子的能量超过1.02MeV ,则电子对的生成成为可能从上面的讨论可以清楚地看到,当γ光子穿过吸收物质时,通过与物质原子发生光电效应、康普顿效应和电子对效应能量损失,γ射线一旦与吸收物质原子发生这三种相互作用,原来能量为的光子就消失,或散射后能量改变、偏离原来的入射方向;总之,一旦发生相互作用,就从原来的入射束中移去。
γ射线穿过物质是,强度逐渐减弱,按指数规律衰减,不与物质发生相互作用的光子穿过吸收层,其能量保持不变,因而没有射程概念可言,但可用“半吸收厚度”来表示γ射线对物质的穿透情况。
本实验研究的主要是窄束γ射线在物质中的吸收规律。
所谓窄束γ射线是指不包括散射成分的射线束通过吸收后的光子,仅由未经相互作用或未经碰撞的光子组成。
1 实验课题r 能 谱 及 r 射 线 的 吸 收2 实验目的1、学习用闪烁谱仪测量γ射线能谱的方法,要求掌握闪烁谱仪的工作原理和实验方法2、学会谱仪的能量标定方法,识别γ能谱,了解物质对γ射线的吸收规律3、并测量吸收片对γ射线的吸收系数和半吸收厚度。
3 实验原理1、γ能谱仪根据原子核结构理论,原子核的能量状态是不连续的,存在着分立能级。
处在能量较高的激发态能级2E 上的核,当它跃迁到低能级1E 上时,就发射γ射线(即波长约在1nm ~ 0.1nm 间的电磁波)。
放出的γ射线的光量子能量12E E hv -=,此处h 为普朗克常数,ν为γ光子的频率。
由此看出原子核放出的γ射线的能量反映了核激发态间的能级差。
因此测量γ射线的能量就可以了解原子核的能级结构。
测量γ射线能谱就是测量核素发射的γ射线强度按能量的分布。
1.1、 闪烁谱仪测量γ射线能谱的原理闪烁能谱仪是利用某些荧光物质,在带电粒子作用下被激发或电离后,能发射荧光(称为闪烁)的现象来测量能谱的。
这种荧光物质常称为闪烁体。
(1) 闪烁体的发光机制闪烁体的种类很多,按其化学性质不同可分为无机晶体闪烁体和有机晶体闪烁体。
有机闪烁体包括有机晶体闪烁体、有机液体闪烁体和有机塑料闪烁体等。
此处仅对常用的无机晶体闪烁体的发光机制作简单介绍。
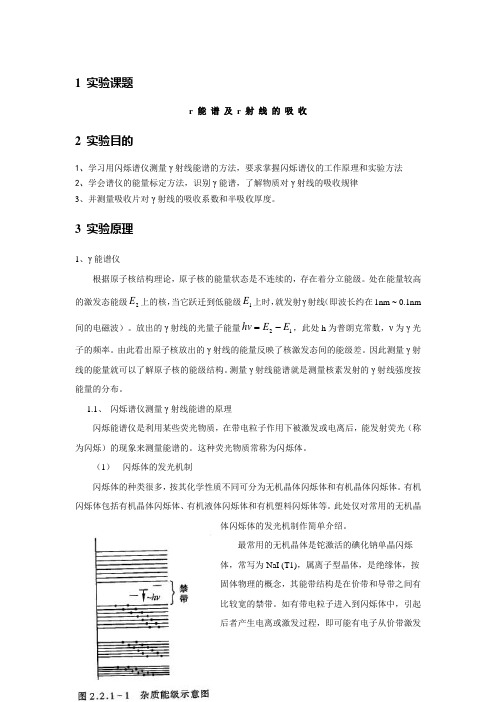
最常用的无机晶体是铊激活的碘化钠单晶闪烁体,常写为NaI (T1),属离子型晶体,是绝缘体,按固体物理的概念,其能带结构是在价带和导带之间有比较宽的禁带。
如有带电粒子进入到闪烁体中,引起后者产生电离或激发过程,即可能有电子从价带激发到导带或激发到激带,然后这些电子再退激到价带的可能过程之一是发射光子。
这种光子的能量还会使晶体中其他原子产生激发或电离过程,也就是光子可能被晶体吸收而不能被探测到。
为此在晶体中掺入少量的杂质原子称为激活原子,如在碘化钠晶体中掺入铊原子,其关键作用是可以在低于导带和激带的禁带中形成一些杂质能级,见图2.2.1-1示意图。
近代物理实验报告指导教师:得分:实验时间: 2009 年 12 月 14 日,第十六周,周一,第 5-8 节实验者:班级材料0705 学号 5 姓名童凌炜同组者:班级材料0705 学号 7 姓名车宏龙实验地点:综合楼 507实验条件:室内温度℃,相对湿度 %,室内气压实验题目:物质对伽马射线的吸收实验仪器:(注明规格和型号)射线放射源;闪烁探头;高压电源;放大器;多道脉冲幅度分析器;吸收片若干。
仪器组成如下图所示:实验目的:1.了解掌握射线与物质相互作用的性质和特点2.学习掌握物质对射线的吸收规律3.测量射线在不同物质中的吸收系数4.实验原理简述:当原子核发生α和β衰变时,通常衰变到原子核的激发态,由于处于激发态的原子核是不稳定的,它要向低激发态跃迁,同时往往放出γ光子,这一现象称为γ衰变。
γ光子会与下列带电体发生相互作用,原子中的束缚电子,自由电子,库伦场及核子。
这些类型的相互作用可以导致下列三种过程的一种发生:光子完全吸收、弹性散射、非弹性散射。
如右所示为为γ射线与物质相互作用的示意图图中的三种状况分别为: 1. 低能时以光电效应为主。
2. 光子可以被原子或单个电子散射到另一方向,其能量可损失也可不损失。
3. 若入射光子的能量超过,则电子对的生成成为可能从上面的讨论可以清楚地看到,当γ光子穿过吸收物质时,通过与物质原子发生光电效应、康普顿效应和电子对效应能量损失,γ射线一旦与吸收物质原子发生这三种相互作用,原来能量为的光子就消失,或散射后能量改变、偏离原来的入射方向;总之,一旦发生相互作用,就从原来的入射束中移去。
γ射线穿过物质是,强度逐渐减弱,按指数规律衰减,不与物质发生相互作用的光子穿过吸收层,其能量保持不变,因而没有射程概念可言,但可用“半吸收厚度”来表示γ射线对物质的穿透情况。
本实验研究的主要是窄束γ射线在物质中的吸收规律。
所谓窄束γ射线是指不包括散射成分的射线束通过吸收后的光子,仅由未经相互作用或未经碰撞的光子组成。
中国石油大学 近代物理实验 实验报告 成 绩:班级:应用物理学09-2班 姓名:王国强 同组者:庄显丽 教师:β射线的吸收【实验目的】1、了解β射线与物质相互作用的机理。
2、学习测量β射线最大能量的方法。
3、测量吸收物质对β射线的阻止本领。
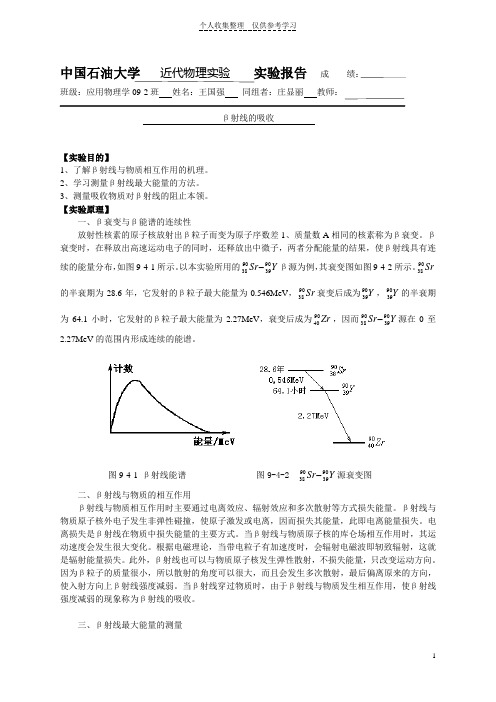
【实验原理】一、β衰变与β能谱的连续性放射性核素的原子核放射出β粒子而变为原子序数差1、质量数A 相同的核素称为β衰变。
β衰变时,在释放出高速运动电子的同时,还释放出中微子,两者分配能量的结果,使β射线具有连续的能量分布,如图9-4-1所示。
以本实验所用的Y Sr 90399038-β源为例,其衰变图如图9-4-2所示。
Sr 9038的半衰期为28.6年,它发射的β粒子最大能量为0.546MeV ,Sr 9038衰变后成为Y 9039,Y 9039的半衰期为64.1小时,它发射的β粒子最大能量为2.27MeV ,衰变后成为Zr 9040,因而Y Sr 90399038-源在0至2.27MeV 的范围内形成连续的能谱。
图9-4-1 β射线能谱 图9-4-2 Y Sr 90399038-源衰变图二、β射线与物质的相互作用β射线与物质相互作用时主要通过电离效应、辐射效应和多次散射等方式损失能量。
β射线与物质原子核外电子发生非弹性碰撞,使原子激发或电离,因而损失其能量,此即电离能量损失。
电离损失是β射线在物质中损失能量的主要方式。
当β射线与物质原子核的库仑场相互作用时,其运动速度会发生很大变化。
根据电磁理论,当带电粒子有加速度时,会辐射电磁波即轫致辐射,这就是辐射能量损失。
此外,β射线也可以与物质原子核发生弹性散射,不损失能量,只改变运动方向。
因为β粒子的质量很小,所以散射的角度可以很大,而且会发生多次散射,最后偏离原来的方向,使入射方向上β射线强度减弱。
当β射线穿过物质时,由于β射线与物质发生相互作用,使β射线强度减弱的现象称为β射线的吸收。
三、β射线最大能量的测量β射线的能量是连续分布的,对于确定的放射源,有确定的最大能量E 0,因此,如果能够测量出β射线的最大能量E 0,则可以判别放射性核素的种类,其为放射性测量的一项重要内容。
