1.1.2 弧度制 (1)
- 格式:doc
- 大小:194.50 KB
- 文档页数:2
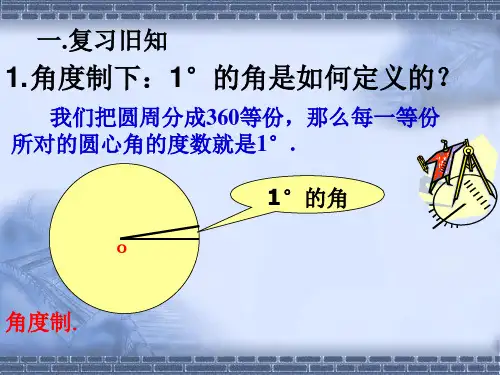




【学习目标】⒈理解1弧度的角及弧度的定义;掌握角度与弧度的换算公式;2.熟练进行角度与弧度的换算;理解角的集合与实数集R 之间的一一对应关系;【自主探究1】1、 角度制:用_____作为度量角的单位,1度的角等于周角的_______;弧度制:用弧度作为度量角的单位.1弧度的规定:长度等于_________长的弧所对的__________叫做1弧度.用符号______表示。
2、阅读P6“探究”,将表格填写完整:思考:如果一个半径为r 的圆的圆心角α所对的弧长是l ,那么α的弧度数是多少?角α的弧度数的绝对值是:=||α______________应确立这样的概念:角的概念推广之后,无论用角度制还是弧度制都能在角的集合与实数的集合之间建立一 种一一对应的关系 任意角的集合 实数集R3、常用换算关系(1)︒360=______rad (2)︒180=______rad (3)︒1=________rad(4)1rad= ( ) º≈________ º=___________【自主探究2】1、把'3067 化成弧度,把rad π53化成度2、一些常用角度和弧度之间的关系:【自主训练】1、弧度和角度的互化:o 360=_________rad ;o 1=_______rad ;1rad=__________o .2、下列命题中,正确的序号是__________.(1)1弧度是长度为半径的弧(2)大圆中1弧度角比小圆中1弧度的角大(3)1弧度的角是长度等于半径长的弧所对的圆心角(4)圆心角为1弧度的扇形的弧长都相等(5)长度等于半径的弦所对的圆心角是1弧度的角3、把下列弧度化成角度: (1) 12π (4) 76π- (2) 43π-(5) 1.4 (3) 310π (6) 234、把下列角度化成弧度:(1) '2230 (4) 36(2) 1200 (5) 150-5、(1)第一象限角的集合 用度表示:______________________________________;用弧度表示:_______________________________________;(2)终边在x 轴上的角的集合 用度表示:______________________________________;用弧度表示:___________________________________________;6、把角16π3化为α+2k π(k ∈Z,0<α<2π)的形式。
1.1.2 弧度制(1)一、课题:弧度制(1)二、三维目标:1、 知识与技能目标:理解弧度制的意义2、 过程与方法目标:能正确的应用弧度与角度之间的换算;3、 记住公式||l rα= 4、 情感态度价值目标:使学生更全面地看问题,从多角度考虑问题。
三、教学重、难点:弧度与角度之间的换算。
教学方法:讲述法、启发法四、教学过程:(一)复习:初中时所学的角度制,是怎么规定1 角的? (初中时把一个周角的1360记为1 ) (二)新课讲解:1.弧度角的定义:规定:我们把长度等于半径的弧所对的圆心角叫做1弧度的角,记此角为1rad .练习:圆的半径为r ,圆弧长为2r 、3r 、2r 的弧所对的圆心角分别为多少?说明:一个角的弧度由该角的大小来确定,与求比值时所取的圆的半径大小无关。
思考:什么π弧度角?一个周角的弧度是多少?一个平角、直角的弧度分别又是多少?2.弧度的推广及角的弧度数的计算:规定:正角的弧度数为正数,负角的弧度数为负数,零角的弧度数为零;角α的弧度数的绝对值是rl =||α,(其中l 是以角α作为圆心角时所对弧的长,r 是圆的半径)。
说明:我们用弧度制表示角的时候,“弧度”或rad 经常省略,即只写一实数表示角的度量。
例如:当弧长4l r π=且所对的圆心角表示负角时,这个圆心角的弧度数是:4||4l r r rπαπ-=-=-=- 3.角度与弧度的换算3602π= rad 180π= rad 1801π=︒rad 0.01745≈rad 1rad =︒)180(π5718'≈4.例题分析:例1 把'3067︒化成弧度.解:因为6730' 67.5= ,所以 3671567.51808rad ππ'=⨯= rad . 例2 把35πrad 化成度。
1.1.2 弧度制(1)
一、课题:弧度制(1)
二、教学目标:1.理解弧度制的意义;
2.能正确的应用弧度与角度之间的换算;
3.记住公式||l r
α=(l 为以角α作为圆心角时所对圆弧的长,r 为圆半径)。
三、教学重、难点:弧度与角度之间的换算。
四、教学过程:
(一)复习:
初中时所学的角度制,是怎么规定1角的? (初中时把一个周角的1360
记为1) (二)新课讲解:
1.弧度角的定义:
规定:我们把长度等于半径的弧所对的圆心角叫做1弧度的角,记此角为1rad . 练习:圆的半径为r ,圆弧长为2r 、3r 、2
r 的弧所对的圆心角分别为多少? 说明:一个角的弧度由该角的大小来确定,与求比值时所取的圆的半径大小无关。
思考:什么π弧度角?一个周角的弧度是多少?一个平角、直角的弧度分别又是多少?
2.弧度的推广及角的弧度数的计算:
规定:正角的弧度数为正数,负角的弧度数为负数,零角的弧度数为零;角α的弧度数的绝对值是r l =||α,(其中l 是以角α作为圆心角时所对弧的长,r 是圆的半径)。
说明:我们用弧度制表示角的时候,“弧度”或rad 经常省略,即只写一实数表示角的度量。
例如:当弧长4l r π=且所对的圆心角表示负角时,这个圆心角的弧度数是
4||4l r r r
παπ-=-
=-=-. 3.角度与弧度的换算
3602π=rad 180π=rad 1801π
=︒rad 0.01745≈rad 1rad =︒)180
(π5718'≈
4.例题分析:
例1 把'3067︒化成弧度.
解:因为6730'67.5=,所以 3671567.51808rad ππ'=⨯= rad . 例2 把3
5
πrad 化成度。
解:35
π rad 31801085=⨯=. 例3 用弧度制分别表示轴线角、象限角的集合。
(1)终边落在x 轴的非正、非负半轴,y 轴的非正、非负半轴的角的集合。
(2)第一、二、三、四象限角的弧度表示。
解:(1)终边落在x 轴的非正半轴的角的集合为{}|2,k k Z ββππ=+∈;
非负半轴的角的集合为{}|2,k k Z ββπ=∈;
终边落在y 轴的非正半轴的角的集合为3|2,2k k Z πββπ⎧⎫=+∈⎨⎬⎩⎭
; 非负半轴的角的集合为|2,2k k Z πββπ⎧⎫=+∈⎨⎬⎩⎭
;
所以,终边落在x 轴上的角的集合为{}|,k k Z ββπ=∈;落在y 轴上的为
|,2k k Z πββπ⎧⎫=+∈⎨⎬⎩⎭
. (2)第一象限角为22,2k k k Z ππβπ⎧⎫<<+∈⎨⎬⎩⎭;第二象限角为22,2k k k Z ππβππ⎧⎫+
<<+∈⎨⎬⎩⎭; 第三象限角为322,2k k k Z πππβπ⎧⎫+<<+∈⎨⎬⎩⎭;第四象限角为3222,2k k k Z ππβππ⎧⎫+<<+∈⎨⎬⎩⎭
. 例4 将下列各角化为2(02,)k k Z πααπ+≤<∈的形式,并判断其所在象限。
(1)193π; (2)315-; (3)1485-. 解:(1)19632333
πππππ=+=⨯+,所以,此角为第一象限角; (2)73152(1)2444
πππππ-=-=-+=-⨯+,所以此角为第一象限角; (3)33714851044
πππ-=-=-+,所以此角为第四象限角. 5
六、小结:1.弧度制的定义;
2.弧度制与角度制的转换与区别。
3.。
七、作业:
补充:1.在ABC ∆中,若::3:5:7A B C ∠∠∠=,求A ,B ,C 弧度数。
2.直径为20cm 的滑轮,每秒钟旋转45,则滑轮上一点经过5秒钟转过的弧长是多少?。