目录
设计任务书 (2)
原动机的选择 (5)
传动机构的选择与比较 (7)
执行机构的选择与比较 (9)
机构系统运动方案的拟定与比较 (10)
机构系统的运动循环图 (16)
机构功能分解图与动作分解图 (20)
机构的设计 (22)
机构的运动简图 (26)
必要的计算公式与有关调用子程序 (27)
程序图 (33)
参考文献··································一、设计任务书
(1)、功能要求及工艺动动作分解
○1总功能要求
在产品上打印记号
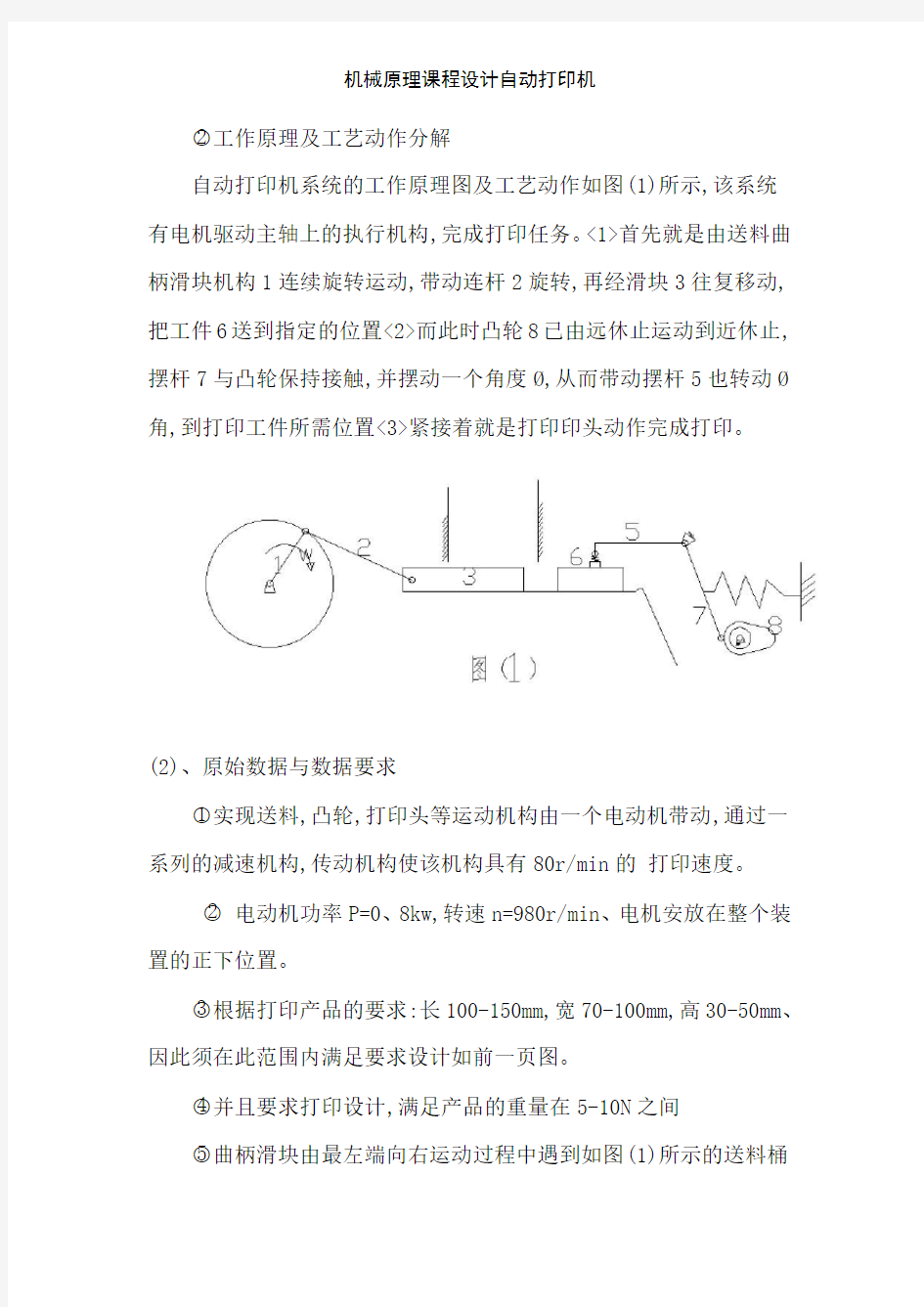
○2工作原理及工艺动作分解
自动打印机系统的工作原理图及工艺动作如图(1)所示,该系统
有电机驱动主轴上的执行机构,完成打印任务。<1>首先就是由送料曲柄滑块机构1连续旋转运动,带动连杆2旋转,再经滑块3往复移动,把工件6送到指定的位置<2>而此时凸轮8已由远休止运动到近休止,摆杆7与凸轮保持接触,并摆动一个角度?,从而带动摆杆5也转动?角,到打印工件所需位置<3>紧接着就是打印印头动作完成打印。
(2)、原始数据与数据要求
○1实现送料,凸轮,打印头等运动机构由一个电动机带动,通过一系列的减速机构,传动机构使该机构具有80r/min的打印速度。
○2电动机功率P=0、8kw,转速n=980r/min、电机安放在整个装置的正下位置。
○3根据打印产品的要求:长100-150mm,宽70-100mm,高30-50mm、因此须在此范围内满足要求设计如前一页图。
○4并且要求打印设计,满足产品的重量在5-10N之间
○5曲柄滑块由最左端向右运动过程中遇到如图(1)所示的送料桶
中落下的工件并把它推到指定的打印位置,其中滑块的两极限位置间距为89mm。
○6印头摆角为4°,印头工作行程与返回行程分别由凸轮的回程角φ1=120o与升程角φ0=70o决定。
(3)、运动方案构思提示
○1实现送料机构-夹紧功能的机构可以采用凸轮机构或有一定停歇时间的连杆机构。当送料,夹紧机构的执行件将产品送到指定位置,执行机构停止不动,维持推紧力,待打印机构执行件打印完之后被推走。最终我们经过一系列方案的构思与分析,决定由一对心曲柄滑块来完成送料与出料。滑块的两极限位置如下图(2),极限间距为L、
○2实现打印功能的机构可以采用平面连杆机构或直动(摆动)凸轮机构。初步设计思路如下图(3)、凸轮1转动带动杆2从而带动杆3摆动,印头4在摆下就是动作完成打印。
○3实现出料动作的机构由送料机构来完成,当打印完第一个工件时,曲柄旋转一周,又送来另一个工件,当第二个工件送到时把第一个工件推出打印位置沿着出料带送出。
○4动力控制:自动打印机系统的三个执行机构都就是有一台电动机控制,因此实现三个分功能运动的机构必须联动,且其主要动作要协调。所以首先要构思各个执行机构执行顺序,然后勾画出描述各机构动作协调配合的运动循环图,最后按执行路线连成整机,力求结构简单,紧凑。初步设计的传动如下图。