机载激光雷达数据后处理软件(LiDAR_Suite)简介
- 格式:pdf
- 大小:945.94 KB
- 文档页数:4
激光雷达数据处理与地形图制作工具软件比较激光雷达(Lidar)是一种能够高效获取地球表面三维信息的技术。
它结合了激光技术和雷达原理,通过向地面发送激光束并测量反射返回时间来获取地形表面的点云数据。
这种数据可以用来生成高精度的地形图,用于各种应用领域,如地质勘探、城市规划、环境监测等。
为了对激光雷达数据进行处理和地形图的制作,科研工作者和工程师们开发了许多不同的软件工具。
本文将对几种常用的激光雷达数据处理与地形图制作工具软件进行比较。
首先,我们来介绍一种常用的激光雷达数据处理工具,即LASTools。
LASTools是一个开源的软件套件,提供了一系列用于激光雷达数据处理的工具。
它支持常见的激光雷达数据格式,如LAS和LAZ,并提供了各种功能,包括数据过滤、分类、点云修复、DEM生成等。
LASTools具有用户友好的界面和丰富的文档,使得用户可以轻松地进行数据处理和图形化展示。
另一个值得一提的激光雷达数据处理工具是FUSION。
FUSION是一个功能强大且广泛使用的软件包,特别适用于森林资源管理和生态学研究领域。
FUSION与LASTools类似,支持多种激光雷达数据格式,并提供了许多数据处理和分析功能。
它的主要特点之一是可以进行全球定位系统(GPS)和惯性测量单元(IMU)数据的处理和点云配准,这对于精确地获取地形数据非常重要。
除了以上两种工具之外,还有一种受欢迎的激光雷达数据处理和地形图制作工具是CloudCompare。
与LASTools和FUSION不同,CloudCompare是一个开源的三维点云处理软件,支持多种点云数据格式。
它具有强大的点云处理和分析功能,包括数据滤波、配准、重建等。
CloudCompare还支持多种数据可视化和导出方式,使用户能够更方便地进行数据展示和分析。
除了上述的激光雷达数据处理工具之外,还有一些专门用于地形图制作的软件。
其中一种是Global Mapper,这是一款功能强大的地理信息系统(GIS)软件,广泛用于地理数据的处理和分析。
机载激光雷达系统的应用与数据后
处理技术
机载激光雷达系统(LIDAR)是一种可以通过激光束发射到地面或悬崖表面的距离测量装置,用于采集三维立体地形数据,并能够在精确的垂直和水平方向上测量距离。
它具有快速、准确的优势,常被用于航空遥感,如飞行路线规划、地形精细化、地形分析、细粒度地理信息系统(GIS)数据建模等。
机载激光雷达系统的数据后处理技术是一种特定的技术,它可以将采集的原始数据进行组织和处理,以便在地图中显示出有用的信息。
一般来说,机载激光雷达系统的数据后处理技术包括去噪、点云拟合、投影、点云滤波等步骤。
其中,去噪是将激光雷达扫描时产生的噪声滤除,以确保数据的准确性;而点云拟合则是根据不同的地形状态,使用拟合算法对点云进行处理,以得到正确的数据;投影则是将采集到的数据投影到坐标系上,以便绘制出地图;最后,点云滤波是去除数据中的异常点,以获得更加准确的数据。
机载激光雷达系统的应用主要是用于航空遥感,如飞行路线规划、地形精细化、地形分析、细粒度地理信息系
统(GIS)数据建模等。
在飞行路线规划中,激光雷达系统可以帮助确定安全的飞行路线;在地形精细化方面,它可以提供准确的地形数据,以便精细化地图;在地形分析方面,它可以帮助研究人员分析地形结构,以更好地了解地表情况;在GIS数据建模方面,它可以帮助研究人员建立准确的地理信息模型,以便进行更好的地理信息分析。
LIDAR数据概述技术背景LiDAR是Light Detection And Ranging的英文缩写,称为激光雷达,是激光扫描与探测系统的简称。
LiDAR技术最早是欧美一些发达国家为了满足海图制图、港口和港湾测量的特殊需要于上世纪60年代中期提出并于80年代开发出来的,一直到上世纪90年代初该技术才趋向成熟。
现今,LiDAR系统主要分为两大类:机载LiDAR系统和地面LiDAR系统。
同时,按照使用用途和功能差异来划分,机载LiDAR系统又可分为用于获得地面三维信息数据的地形LiDAR系统和用于获得水下地形的海道测量LiDAR系统。
机载LiDAR系统(主要指地形LiDAR系统)机载LiDAR系统组成从功能上讲,机载LiDAR是一种集激光、全球定位系统(GPS)和惯性测量单元(IMU)三种技术于一身的系统,这三种技术的结合,可以高度准确地定位地面目标的三维坐标。
现今的机载LiDAR系统中还配备有千万级像素的航空数码相机,同时获取地面的高清晰数码影像。
机载LiDAR系统机载LiDAR系统工作原理地球的表面以及覆盖其上的目标,譬如植被、建筑物等都可以对电磁波产生反射。
LiDAR系统包括一个单束窄带激光器和一个接收系统。
激光器产生并发射离散的激光脉冲,打在物体上并反射,最终被接收器所接受。
接收器准确地测量激光脉冲从发射到被反射回的传播时间。
因为激光脉冲以光速传播,所以接收器总会在下一个脉冲发出之前收到前一个被反射回的脉冲。
这种直接距离测量方法是基于短波电子信号在一个均匀的介质层内(即空气),以恒定的速度直线传播,并且在不同的介质分界面(地球表面)被反射回来。
其一般原理可以简单描述为:C=C。
/n (1)其中,C。
为真空光速,n为介质,即空气折射率从激光发射器发出的激光光束到达地面并被反射后,被激光器上的接收单元接收和记录。
一般把从发射到接收这段时间称为运行时间t,这个时间参数t与光束的出发点和地面之间的双倍距离R成正比,由此可以计算出此距离:R =t?c/2(2)结合激光器的高度、激光扫描角度、时间参数以及GPS记录的位置参数和IMU记录的角度参数,就可以准确地计算出每一个激光点的三维坐标X、Y、Z。

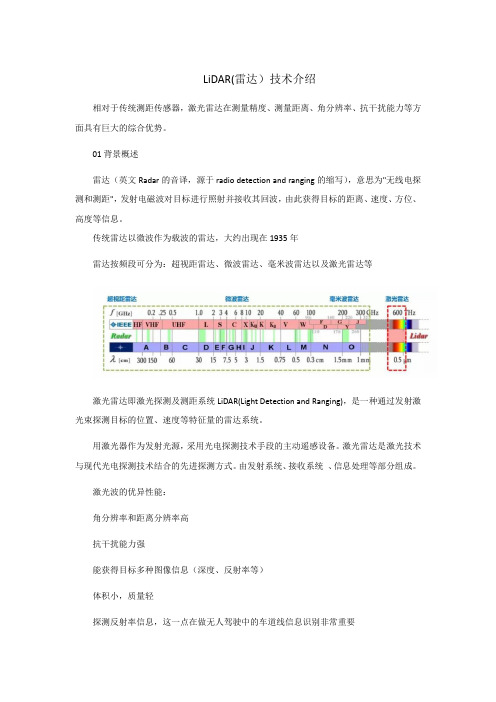
机载激光雷达(LIDAR)激光雷达概念:用激光器作为辐射源的雷达。
激光雷达是激光技术与雷达技术相结合的产物。
由发射机、天线、接收机、跟踪架及信息处理等部分组成。
激光雷达采用脉冲或连续波2种工作方式,探测方法分直接探测与外差探测。
激光雷达的发展进程LIDAR测绘技术空载激光扫瞄技术的发展,源自1970年,美国航天局(NASA)的研发。
因全球定位系统(Global PositioningSystem、GPS)及惯性导航系统(InertialInertiNavigation System、INS)的发展,使精确的即时定位及姿态付诸实现。
德国Stuttgart大学于1988到1993年间将激光扫描技术与即时定位定姿系统结合,形成空载激光扫描仪(Ackermann-19)。
之后,空载激光扫瞄仪随即发展相当快速,约从1995年开始商业化,目前已有10多家厂商生产空载激光扫瞄仪,可选择的型号超过30种(Baltsavias-1999)。
研发空载激光扫瞄仪的原始目的是观测多重反射(multiple echoes)的观测值,测出地表及树顶的高度模型。
由于其高度自动化及精确的观测成果用空载激光扫瞄仪为主要的DTM生产工具。
激光扫描方法不仅是军内获取三维地理信息的主要途径,而且通过该途径获取的数据成果也被广泛应用于资源勘探、城市规划、农业开发、水利工程、土地利用、环境监测、交通通讯、防震减灾及国家重点建设项目等方面,为国民经济、社会发展和科学研究提供了极为重要的原始资料,并取得了显著的经济效益,展示出良好的应用前景。
低机载LIDAR地面三维数据获取方法与传统的测量方法相比,具有生产数据外业成本低及后处理成本的优点。
目前,广大用户急需低成本、高密集、快速度、高精度的数字高程数据或数字表面数据,机载LIDAR技术正好满足这个需求,因而它成为各种测量应用中深受欢迎的一个高新技术。
快速获取高精度的数字高程数据或数字表面数据是机载LIDAR技术在许多领域的广泛应用的前提,因此,开展机载LIDAR数据精度的研究具有非常重要的理论价值和现实意义。

机载激光雷达数据处理方法综述摘要:机载激光雷达(Airborne LiDAR)技术在遥感领域起到了至关重要的作用,可以获取高精度的地理空间数据。
然而,机载激光雷达数据的处理是一个复杂且关键的任务,直接影响到数据的准确性和可靠性。
本文综述了当前机载激光雷达数据处理的常用方法,包括预处理、数据配准、分类和特征提取等方面,旨在为相关研究者提供参考。
1. 引言机载激光雷达是一种通过发射激光束并测量其返回信号的遥感技术。
它可以实时获取地物的高分辨率、三维几何信息,成为地理空间数据获取的重要手段。
机载激光雷达数据的处理涉及到预处理、数据配准、分类和特征提取等步骤,需要考虑大量的技术和算法。
2. 机载激光雷达数据处理方法2.1 预处理预处理是机载激光雷达数据处理的第一步,旨在去除噪声和杂散信息,提高数据质量。
常用的预处理方法包括:(1)去除离群点:通过设定阈值,排除距离激光波束过远或过近的数据点。
(2)去除地面点:利用地面模型,将地面上的点云数据挑选出来,去除非地面点。
(3)去除植被覆盖:通过对植被的检测和分析,去除植被对地面点云的遮挡。
2.2 数据配准数据配准是将不同位置、不同扫描线的激光雷达数据进行对齐,从而达到全区域的无缝拼接。
常用的数据配准方法包括:(1)球面配准:将球面上不同点云数据投影到一个球面上,通过优化球面上的变换参数实现数据的配准。
(2)特征匹配:通过提取数据点云的特征,如表面几何特征和颜色特征,利用特征匹配算法估计不同点云之间的变换关系。
2.3 分类分类是机载激光雷达数据处理中的重要步骤,旨在将点云数据分为不同的地物类别。
常用的分类方法包括:(1)基于形状特征的分类:通过分析点云数据的形状特征,如表面曲率和点云密度,将其分为建筑物、树木、道路等类别。
(2)基于反射率的分类:通过分析点云数据的反射率,将其分为不同的地物类别。
不同地物对激光束的反射率有所不同,可以通过反射率的阈值进行分类。
2.4 特征提取特征提取是机载激光雷达数据处理中的关键步骤,旨在提取有效的地物信息。
LiDAR数据处理软件的使用技巧与操作方法LiDAR(光探测与测距)技术在近年来得到了广泛的应用和发展,尤其在地图绘制、三维建模、环境监测等领域发挥了重要作用。
作为一种高精度的测距技术,LiDAR通过发射激光束并测量其从目标物体反弹回来所需的时间来获取距离信息。
为了正确地利用LiDAR数据,我们需要掌握一些关键的技巧和操作方法。
本文将介绍LiDAR数据处理软件的使用技巧,以帮助读者更好地处理和分析LiDAR数据。
首先,在使用LiDAR数据处理软件之前,我们需要准备好所需的数据。
LiDAR数据通常由激光扫描系统获取,并以点云(point cloud)的形式存储。
点云数据是由大量的三维坐标点组成的集合,每个点都包含了地面、建筑物、树木等目标物体的位置信息。
在选择数据时,我们可以根据不同的需求选择不同分辨率和密度的点云数据。
高分辨率的数据可以提供更详细的地形和物体信息,但同时也会增加数据量和处理复杂度。
一旦准备好LiDAR数据,我们可以开始使用LiDAR数据处理软件进行处理。
这些软件通常提供了丰富的功能和工具,可以帮助我们进行数据滤波、分类、分割、拟合等操作。
在处理数据之前,我们需要对LiDAR数据进行预处理,以去除噪声和无效数据。
其中,最常用的预处理方法包括点云滤波和地面提取。
点云滤波是将点云数据中的噪声和无效数据滤除,以保留有效的目标物体信息。
常用的点云滤波方法包括统计滤波、半径滤波和采样滤波等。
统计滤波通过计算每个点周围邻域点的统计参数来判断其是否为噪声点,从而实现滤波。
半径滤波是根据点到周围邻域点的距离是否小于给定的半径来判断其是否为噪声点。
采样滤波是通过间隔采样的方式对点云数据进行稀疏化,从而减少数据量和噪声。
除了点云滤波外,地面提取也是LiDAR数据处理中一个重要的步骤。
地面提取的目的是将点云数据中的地面点进行提取,以便后续的地形分析和建模。
常用的地面提取方法包括基于高度阈值、曲率阈值和地面平面拟合等。
激光雷达点云数据处理软件对比及其应用研究曹炳霞;黄剑飞【摘要】文中介绍了TerraSolid、LiDAR Suite和LiDAR-DP三款软件功能,分析了软件各自优缺点,通过试验比较了软件在不同地形特征区域的激光雷达点云滤波效果.最后,提出了一种结合TerraSolid、LiDAR Suite和LiDAR-DP软件处理激光点云数据,制作数字高程模型(DEM)的技术方法,为高精度DEM生产提供参考.【期刊名称】《矿山测量》【年(卷),期】2019(047)001【总页数】4页(P109-112)【关键词】激光雷达;TerraSolid;LiDAR Suite;LiDAR-DP;数字高程模型【作者】曹炳霞;黄剑飞【作者单位】广东省国土资源技术中心,广东广州 510075;广东省测绘产品质量监督检验中心,广东广州 510075【正文语种】中文【中图分类】TD172;P225机载激光雷达(LiDAR)作为一种能够大规模获得地面三维数字信息的新技术手段,具有对像控测量依赖小、精度高、全天候、工作效率高、成果周期短等特点[1],其数据后处理成果已经在地形测绘、DEM、DOM制作、城市三维建模、公路选线、水利建设、森林评估、海岸线提取、电力巡线与选线、应急救灾等领域得到广泛应用[2]。
目前,LiDAR点云数据后处理软件国外主要有TerraSolid、LP360、ENVI LiDAR、INPHO SCOP++、TopPIT、REALM等,国内主要有中国测绘科学研究院LiDAR Station、武汉天擎空间信息技术有限公司LiDAR Suite、北京数字绿土科技有限公司LiDAR360、西安煤航LiDAR-DP等[3]。
点云滤波作为DEM生产和进一步精化分类的基础,是通过一定的规则和数学模型将地面点和非地面点区分的过程[4]。
在LiDAR的数据后处理过程中,点云数据的分类工作占60%~80%的工作量[5],目前还没有能够完全自动化点云分类获得满足成果精度的软件,点云滤波效果和人机交互友好性将直接影响DEM生产的效率,有必要从软件的功能、人机交互的友好性、点云滤波效果、滤波适用地形特征进行比较分析,从而选择适合测区地形特征的大规模生产高精度DEM的方法。
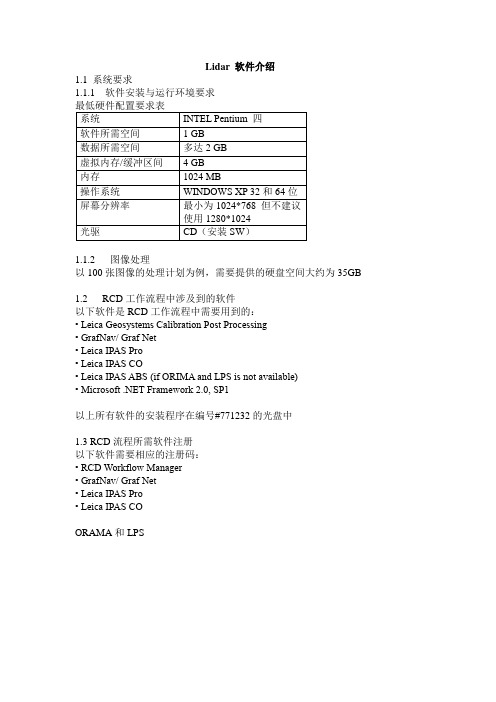
Lidar 软件介绍1.1 系统要求1.1.1 软件安装与运行环境要求最低硬件配置要求表系统INTEL Pentium 四软件所需空间 1 GB数据所需空间多达2 GB虚拟内存/缓冲区间 4 GB内存1024 MB操作系统WINDOWS XP 32和64位屏幕分辨率最小为1024*768 但不建议使用1280*1024光驱CD(安装SW)1.1.2 图像处理以100张图像的处理计划为例,需要提供的硬盘空间大约为35GB 1.2 RCD工作流程中涉及到的软件以下软件是RCD工作流程中需要用到的:• Leica Geosystems Calibration Post Processing• GrafNav/ Graf Net• Leica IPAS Pro• Leica IPAS CO• Leica IPAS ABS (if ORIMA and LPS is not available)• Microsoft .NET Framework 2.0, SP1以上所有软件的安装程序在编号#771232的光盘中1.3 RCD流程所需软件注册以下软件需要相应的注册码:• RCD Workflow Manager• GrafNav/ Graf Net• Leica IPAS Pro• Leica IPAS COORAMA和LPS1.4 处理过程中不同大小和格式的相片在下载和处理过程中,会产生以下三种格式和大小的相片:类型文件扩展名相片大小备注RAW影像文件.raw 7348*5490 CC10记录的影像转换成的tif影像.tif 7212*5408 在使用CPP软件处理之后校准后释放出的tif影像.tif 7012*5208 在校准之后。
大小取决于RCD工作流程管理规定的影像裁剪尺寸。
默认值是100像素。

机载激光雷达简介机载激光雷达(Airborne LiDAR)是一种在飞行器上搭载的激光雷达系统,用于高精度地测量地表地形、建筑物、植被和其他地貌特征的三维信息。
它通过发射激光束并测量激光束从发射到接收的时间来计算距离,并通过大量的测量点生成精确的地形模型。
工作原理机载激光雷达的工作原理基于激光雷达的时间测量法。
在飞行器上安装有激光发射器和接收器,激光束从飞行器发出并照射到地面。
激光束照射到地面上的物体后会反射回来,接收器会记录下激光束从发射到接收的时间差。
根据光速固定的特性,可以通过时间差和光速计算出激光束在空间中的传播距离。
机载激光雷达一般会搭配惯性测量单元(IMU)和全球定位系统(GPS)来获取飞行器的位置和姿态信息。
这些信息可以用于计算飞行器相对于测量点的水平和垂直位置,从而得到准确的地形数据。
应用领域机载激光雷达在地理测绘、环境监测和灾害管理等领域得到了广泛应用。
在地理测绘中,机载激光雷达可以快速、准确地获取地形和地貌信息,用于制图和建模。
它可以用于制作数字高程模型(DEM)和数字地表模型(DSM)。
这些模型可以用于城市规划、土地利用规划和自然资源管理。
在环境监测方面,机载激光雷达可用于监测森林、湿地和河流等生态系统。
通过获取植被和地表高度信息,可以评估生态系统的健康状况和植被生长情况。
它还可以检测土地表面的变化,例如岩石滑坡和河岸侵蚀等。
在灾害管理中,机载激光雷达可以用于识别潜在的自然灾害风险区域。
通过获取地表形状和地貌信息,可以评估山体滑坡、泥石流和洪水等灾害的潜在影响范围。
这有助于制定应急救援计划和减轻灾害损失。
优势和挑战机载激光雷达相比于传统的测量方法有许多优势。
首先,它可以快速获取大量的三维测量点,使得地形模型更加准确和详细。
其次,它可以在复杂的地形和植被条件下工作,无论是平地还是山区,都可以获取高质量的数据。
此外,机载激光雷达还可以实现高密度测量,使得更多的细节能够被捕捉到。

LiDAR点云数据处理软件对比研究易俐娜;许筱;易琳;彭向阳【摘要】文中利用目前国内具有代表性的两款激光点云数据处理软件LiDAR Suite和LiDAR 360进行了地势平坦城区的典型地物信息提取和地形复杂山区的数字高程模型生产实验,通过比较它们在点云去噪、滤波、建筑物分类和电力线提取四个方面的数据处理流程及效果,总结了国产LiDAR点云数据处理软件存在的优势和劣势,分析了还有待完善的软件功能,为机载LiDAR点云处理技术的进一步发展提供建议.【期刊名称】《矿山测量》【年(卷),期】2017(045)006【总页数】6页(P1-6)【关键词】LiDAR Suite;LiDAR 360;点云分类;对比【作者】易俐娜;许筱;易琳;彭向阳【作者单位】中国矿业大学(北京),北京100083;中国矿业大学(北京),北京100083;广东电网有限责任公司电力科学研究院,广东广州 510062;广东电网有限责任公司电力科学研究院,广东广州 510062【正文语种】中文【中图分类】P237;TD178机载激光雷达(Airborne Light Detection And Ranging,LiDAR)是一种新型遥感探测手段,由于具备快速、主动、实时、直接获得大范围地表及地物密集采样点三维坐标、强度、回波信息等能力,机载LiDAR在数字高程模型生产,城市目标识别、三维建模、电力线提取等各个测绘领域都得到了广泛应用[1-3],研究成果丰富。
为提高点云数据的应用效益,激光雷达数据处理软件的功能越来越完善,研究人员和用户可选择性也越来越多。
例如,国外比较成熟的LiDAR点云数据处理软件有TerraSolid系列、lastools、OPALS等[4],具有自动匹配航带、点云分类、正射纠正、创建等高线图等功能;而国内LiDAR点云处理软件较具有代表性的有LiDAR Suite和LiDAR 360两款软件,针对LiDAR点云数据信息提取方面的应用需求,具备航带拼接,地物分类,DEM生产,等高线生成等功能。
第42卷第11期2019年11月测绘与空间地理信息GEOMATICS&SPATIALINFORMATIONTECHNOLOGYVol.42ꎬNo.11Nov.ꎬ2019收稿日期:2018-09-10基金项目:国家自然科学基金青年基金(41601504)资助作者简介:周佳雯(1994-)ꎬ女ꎬ江西抚州人ꎬ地理信息科学专业硕士研究生ꎬ主要研究方向为机载激光雷达数据处理ꎮ机载LiDAR点云数据处理软件对比及评测周佳雯1ꎬ张㊀良1ꎬ马海池2ꎬ章文天2(1.湖北大学资源环境学院ꎬ湖北武汉430062ꎻ2.武汉大学遥感信息工程学院ꎬ湖北武汉430079)摘要:针对国内外现有的主流商业LiDAR点云数据处理软件ꎬ从软件功能完备性㊁软件操作和数据处理流程便捷性㊁处理结果的精度等多方面对TerraSolid㊁LiDAR-Suite和LiDAR360进行对比ꎬ分析各软件的优势和劣势ꎬ为测绘生产人员选择点云处理软件提供参考ꎬ也对国产激光雷达点云数据处理软件的发展提出一点看法ꎮ关键词:TerraSolidꎻLiDAR-SuiteꎻLiDAR360ꎻ点云数据处理ꎻ软件中图分类号:P231㊀㊀㊀文献标识码:A㊀㊀㊀文章编号:1672-5867(2019)11-0101-04ComparisonandEvaluationofAirborneLiDARPointCloudDataProcessingSoftwareZHOUJiawen1ꎬZHANGLiang1ꎬMAHaichi2ꎬZHANGWentian2(1.FacultyofResourcesandEnvironmentalScienceꎬHubeiUniversityꎬWuhan430062ꎬChinaꎻ2.SchoolofRemoteSensingandInformationEngineeringꎬWuhanUniversityꎬWuhan430079ꎬChina)Abstract:InviewofthedomesticandforeignexistingmainstreambusinessLiDARpointclouddataprocessingsoftwareTerraSolidꎬLi ̄DAR-SuiteandLiDAR360ꎬwecomparethesethreepointclouddataprocessingsoftwareintermsofthesoftwarefunctionintegrityꎬoperationconvenienceandtheprecisionofthedataprocessingresult.Analysisingtheadvantagesanddisadvantagesofeachsoftware.ThispaperputsforwardsomeviewsonthefurtherdevelopmentofdomesticairborneLiDARdataprocessingsoftware.Keywords:TerraSolidꎻLiDAR-SuiteꎻLiDAR360ꎻpointclouddataprocessingꎻsoftware0㊀引㊀言机载激光雷达(AirborneLightDetectionandRangingꎬ简称机载LiDAR)作为一种新型的主动式遥感技术ꎬ能够快速准确地获取地表高密度㊁高精度的三维点云ꎬ广泛应用于基础测绘㊁地矿勘测㊁水利电力㊁林业㊁考古等多个领域ꎮ随着激光雷达硬件系统的迅速发展ꎬ激光雷达点云数据的利用率得到了很大提高ꎬ同时各类激光雷达软件的功能与性能也在不断完善与提高ꎮ目前ꎬ国外机载Li ̄DAR软件可以分三大类:一是知名的商业化GIS/RS软件ꎬ如ArcGIS㊁Envi㊁Erdas等所新提供的点云数据处理模块ꎬ这些软件提供的点云模块功能尚不够完善ꎬ目前还停留在点云数据浏览与简单的点云分析阶段ꎻ二是较为成熟专业的商业化软件ꎬ如芬兰的Terrasolid㊁美国的QuickTerrainModeler等ꎬ其中ꎬTerrasolid作为世界上第一款商业化LiDAR软件最具有代表性ꎻ三是高校或者科研院所提供的开源点云处理工具ꎬ如CloudCompare㊁LasTools㊁Pointools等ꎬ这些工具具备基本的点云数据处理功能ꎬ但不面向生产ꎬ上手比较复杂ꎬ学术研究的性质更大ꎮ近年来ꎬ国内LiDAR数据处理软件研发队伍也在不断壮大ꎬ如武汉大学㊁中国测绘科学研究院㊁同济大学等单位进行了大量的研发并取得了一定成果ꎮ在这样背景下ꎬ国内诞生了一系列具有自主知识产权的商业化LiDAR数据处理软件ꎬ目前具备一定代表性的有武汉天擎空间信息技术有限公司的LiDAR_Suite㊁北京数字绿土科技有限公司的LiDAR360等ꎮ这些软件都具备了商品化的能力ꎬ除了激光雷达点云常见的处理功能外ꎬ还针对我国测绘㊁规划㊁电力㊁林业等领域的应用要求ꎬ为LiDAR点云数据的后处理工作提供了一些本土化的解决方案ꎮ本文基于国内外现有三款主流商业化软件TerraSolid㊁Li ̄DAR-Suite㊁LiDAR360ꎬ从生产实践㊁功能完整性㊁关键技术能力等方面对这三款软件进行对比ꎬ总结国内外现有软件的特点和优劣ꎮ1㊀软件介绍1.1㊀TerraSolid软件介绍芬兰赫尔辛基大学研发的TerraSolid软件是国际首套商业化机载LiDAR数据处理软件ꎬ作为国际上第一套专业的LiDAR数据处理平台ꎬ该软件基于Bently的Mi ̄crostationCAD软件进行开发ꎬ涵盖了点云数据处理的大部分功能ꎬ主要包括TerraMatch㊁TerraScan㊁TerraModeler㊁TerraPhoto等模块ꎮ1.2㊀LiDAR-Suite软件介绍武汉天擎空间信息技术有限公司推出的具有自主知识产权的LiDAR数据处理软件 LiDAR_Suite是国内第一套完整体系的LiDAR数据处理软件平台ꎮ软件平台结构分为数据读写显示与预处理㊁基本共性处理以及专业应用处理3个层次ꎬ具有点云数据基础处理功能和二次开发接口ꎮ1.3㊀LiDAR360软件介绍LiDAR360由北京数字绿土科技有限公司提供ꎬ软件主要功能包括点云可视化及编辑㊁航带匹配㊁点云分类㊁点云统计分析㊁DEM数据生成及编辑㊁等高线/坡度/坡向等地形产品生成㊁林业分析㊁电力线检测等ꎮ2㊀功能完整性对比分析机载激光雷达点云数据处理的流程为点云读取显示㊁点云滤波分类㊁地物分类㊁点云编辑㊁DEM/等高线生成㊁建筑物提取等ꎬ处理流程如图1所示ꎮ图1㊀点云数据处理流程Fig.1㊀Pointclouddataprocessing㊀㊀由于数据类型与点云算法的专业性和多样性ꎬ不同的软件在设计之初即各有侧重ꎬ使得不同软件在数据处理方案与具体的软件操作上也各有差异ꎮ本文从各软件的应用层出发ꎬ对软件在点云数据处理流程中的功能完备性进行分析ꎬ使得不同应用领域用户对软件有更清晰的认知ꎬ从而根据自身需求选择合适的软件产品ꎮ经过对TerraSolid㊁LiDAR-Suite㊁LiDAR360这三款软件进行数据生产得出的初步结论见表1ꎮ表1㊀软件功能完备性对比Tab.1㊀Softwarefeaturecompletenesscomparison㊀㊀㊀㊀㊀软件名称软件功能㊀㊀㊀㊀㊀TerraSolidLiDAR_SuiteLiDAR360数据组织能力支持多种格式点云㊁影像㊁DEM数据㊁矢量数据(dgnꎬdwg(microsta ̄tion)支持多种格式点云㊁影像㊁DEM数据和矢量数据(shp/mif/tab/dxf)支持多种格式点云㊁影像㊁DEM数据㊁矢量数据(shp/dxf)ꎬ支持自定义数据格式(LiData㊁LiModel)数据显示能力中等:支持点云㊁影像显示ꎬ图层渲染不流畅ꎬ三维显示层次不丰富ꎻDEM㊁影像在其他独立的模块中显示强:支持点云㊁影像㊁DEM㊁矢量文件的显示ꎬ支持二维视图㊁三维视图㊁剖面视图的显示ꎬ支持多视图联动较强:支持点云㊁影像㊁DEM㊁矢量文件的显示支持二维视图㊁三维视图㊁剖面视图航线管理能力支持支持支持工程化管理支持点云分幅和批处理支持点云分幅和批处理支持点云分幅和批处理波形数据可视化与分析不支持支持不支持点云自动滤波渐进TIN加密滤波渐进TIN加密滤波/曲面滤波/平面滤波/坡度滤波改进渐进TIN加密滤波/二次曲面滤波/坡度滤波/中位数分地面点人机交互支持剖面交互支持多种交互工具(画刷分类㊁平面探测等)ꎬ二维㊁三维㊁剖面编辑支持剖面人工交互分类编辑测绘产品生产支持等高线生产模块㊁DEM生产模块㊁地形分析模块支持等高线生产模块㊁DEM生产模块㊁地形分析模块支持等高线生产模块㊁DEM生产模块㊁地形分析模块检校与坐标转换支持支持支持专业应用电力线提取㊁林业分析㊁水文分析电力线提取电力线提取㊁林业分析201㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀测绘与空间地理信息㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀2019年㊀㊀由表可知ꎬTerrasolid是目前功能数量最多㊁最齐全的点云处理软件ꎮ其缺点在于它是基于MicroStation二次开发的ꎬ用户在使用Terrasolid之前须先安装MicroStationꎬ因此ꎬ该软件的一些功能与应用扩展受到一定限制ꎬ包括Terrasolid可视化和人机交互操作ꎮLiDAR_Suite软件提供了基于点云到测绘产品的全套方案ꎬ在测绘领域的优化比较强大ꎬ比如它提供的一些半自动的交互算法ꎬ可以有效提高测绘产品的生产效率和精度ꎬ特别是它提供的波形分析模块ꎬ在林地㊁低矮植被区域高精度DEM提取方面有一定优势ꎮ相对于前两款软件ꎬLiDAR360的主要优势在于提供了较专业的林业分析应用功能ꎬ包括统计参数提取㊁回归分析㊁单木分割㊁按树ID提取点云等工具ꎮ3㊀关键技术能力对比分析数据处理过程中ꎬ点云滤波是DEM生成及后续数据处理(如地物分类㊁三维重建)的重要前提ꎻ建筑物分类是地物分类中最重要的部分ꎬ是建设三维数字城市的主体ꎻ高精度的等高线则是点云数据处理最重要的产品之一ꎬ在测绘㊁水文㊁地貌㊁工程建设等人文和自然科学领域有着广泛应用ꎮ因此ꎬ本文将软件点云自动滤波精度㊁建筑物提取精度㊁等高线提取精度作为衡量软件性能的标准ꎮ分别利用这三款软件进行上述数据处理操作ꎬ结合各软件的不同特点对实验结果进行对比分析ꎮ1)滤波处理精度分析针对点云的自动滤波功能ꎬ本文采用4组ISPRS推荐的点云数据作为试验数据ꎬ4组点云包含不同尺度的建筑物和植被ꎬ点云密度为1.5mꎮ样本11点云数为38010ꎬ最大高差109mꎻ样本12点数为52119ꎬ最大高差106mꎻ样本22点云数为32706ꎬ最大高差为37mꎻ样本42点云数为42470ꎬ最大高差为43mꎮ参考数据是经过人工编辑精细分类的点云数据ꎬ将各软件的处理结果与参考数据进行对比ꎬ计算出Ⅰ类误差㊁Ⅱ类误差和总体误差ꎬ对滤波精度进行定量分析[4]ꎬ作为验证不同软件滤波准确性的依据ꎮ实验结果见表2ꎮ表2㊀各软件点云滤波结果Tab.2㊀Softwarepointcloudfilteringresults㊀㊀㊀㊀软件名称误差类型㊀㊀㊀㊀㊀TerrasolidLiDAR-SuiteLiDAR360样本11样本12样本22样本42TypeⅠ(%)15.4914.7517.63TypeⅡ(%)3.193.724.65Total(%)5.786.047.38TypeⅠ(%)9.9910.1811.5TypeⅡ(%)0.390.210.41Total(%)5.915.936.24TypeⅠ(%)18.0619.0220.05TypeⅡ(%)0.60.640.69Total(%)5.635.746.57TypeⅠ(%)5.194.574.56TypeⅡ(%)0.580.510.53Total(%)2.642.232.25㊀㊀从表2得出ꎬ三款软件的点云自动滤波功能整体差距不大ꎮTerrasolid滤波效果在4组数据中具有更高的稳定性和精确性ꎮ对于山区点云数据(样本42)ꎬLiDAR-Suite具备较好的表现ꎮ整体而言ꎬ国产机载LiDAR点云处理软件能很好地完成点云自动滤波的任务ꎮ2)建筑物分类精度分析为比较各软件建筑物自动分类精度ꎬ本文采用上文中人工滤波后的样本12和样本22作为实验数据ꎮ分别用不同软件进行建筑物分类ꎬ通过参数设置ꎬ多次调整ꎬ选取各软件参数设置最合理㊁建筑物分类效果最好的数据作为最终分类结果ꎬ将人工建筑物分类数据作为参考数据ꎬ计算出Ⅰ类误差㊁Ⅱ类误差和总体误差ꎮ其结果见表3ꎮ表3㊀各软件建筑物自动分类结果Tab.3㊀Automaticclassificationresultsforeach㊀㊀㊀㊀softwarebuilding㊀㊀㊀㊀软件名称误差类型㊀㊀㊀㊀㊀TerrasolidLiDAR-SuiteLiDAR360样本12样本22TypeⅠ(%)4.253.373.68TypeⅡ(%)9.385.397.20Total(%)6.824.885.14TypeⅠ(%)1.430.981.15TypeⅡ(%)5.904.694.96Total(%)3.672.832.92由于机载激光雷达点采用从上向下的数据获取方式ꎬ点云数据的建筑物自动分类一般专指提取建筑物屋顶信息ꎬ其噪声主要为高植被㊁电杆及其他高空遮挡物ꎮ各软件建筑物分类结果都存在不同程度的错分或漏分ꎮ实验结果表明ꎬ对于建筑物的自动分类功能ꎬ国产机载Li ̄DAR点云处理软件LiDAR-Suite和LiDAR360都比Terra ̄scan略强ꎬ但整体差距不大ꎬ在同一水平线上ꎮ3)生成等高线本文采用长阳的山区地面点数据(地面点数为1493000ꎬ最大高差为632.2mꎬ点云密度为每平方米点数0.47)和某地城区地面点数据(地面点数为101235ꎬ最大高差为125.4mꎬ点云密度为0.3)ꎬ利用3个软件分别构建1ʒ2000比例尺的等高线ꎬ通过多次操作ꎬ选择各个软件所获得的最好结果进行比较(各软件生成等高线如图2㊁图3所示)ꎮ从美观和保真[7]这两个方面ꎬ对提取结果进行评价ꎮ由图2可知ꎬTerrasolid㊁LiDAR_Suite㊁LiDAR360均可生成较为完整的复杂山区等高线ꎬ等高线走势和位置基本一致ꎮLiDAR_Suite与Terrasolid生成等高线包含注记ꎬLiDAR360生成的等高线则不包含ꎮ从外观角度考虑ꎬLi ̄DAR_Suite软件生成的等高线较为平滑连续㊁美观㊁等高线无重叠显现ꎻTerrasolid生成等高线转折处更为尖锐ꎬ易出现等高线重叠现象ꎻLiDAR360生成的等高线易出现断裂现象ꎮ相比山区等高线的生成效果ꎬ各软件对于城市等高301第11期周佳雯等:机载LiDAR点云数据处理软件对比及评测线的提取效果均不太理想ꎬTerrasolid与LiDAR_Suite生成等高线不够平滑ꎬ转折处较为尖锐ꎻLiDAR360则易出现更多等高线断裂㊁不连续现象ꎮ图2㊀1ʒ2000山区等高线生成图Fig.2㊀1ʒ2000mountaincontourmap图3㊀1ʒ2000城区等高线生成图Fig.3㊀1ʒ2000urbancontourmap4㊀结束语本文通过对LiDAR-suite㊁LiDAR360㊁TerraSolid三款商业化点云数据处理软件进行功能完备性和关键技术对比ꎬ结合目前点云数据处理的研究进展ꎬ分析每款软件在LiDAR点云数据处理方面的特点:1)Terrasolid作为第一款商业化点云数据处理软件ꎬ功能最为齐全ꎮ国产软件也基本实现了点云到测绘产品的全部功能ꎬ完全具备替代进口软件的可能性ꎬ同时ꎬ国产软件在点云数据显示㊁人机交互操作等方面较Terra具有一定优势ꎬ测绘遥感行业人员可以重点考虑国产软件ꎮ2)由于现有的点云滤波算法还无法完全适用于多种不同地形ꎬ在地势平坦地方滤波效果较好ꎬ但在复杂地形区域易因坡度或高程变化较大被误判为非地面点ꎮ所以ꎬ在点云滤波和建筑物分类方面ꎬ各软件都需要在自动分类的基础上以人机交互的方式对点云精细分类ꎬ自动滤波和建筑物分类精度都有较大提升空间ꎮ点云数据的自适应滤波和智能分类算法的研究亟须加强ꎮ3)软件操作参数设置较为复杂ꎬ需要多次测试才能获取合适的参数ꎬ得到较为满意的分类效果ꎻ测绘产品如等高线尤其城市区域等高线提取效果可进一步优化ꎮ同时软件数据处理的总体效率与速度需要进一步提升ꎮ参考文献:[1]㊀张小红.机载激光雷达测量技术理论与方法[M].武汉:武汉大学出版社ꎬ2007.[2]㊀刘正军ꎬ徐胜攀ꎬ左志权ꎬ等.机载激光雷达数据处理软件设计及关键技术研究[J].测绘通报ꎬ2012(12):91-93.[3]㊀隋立春ꎬ张熠斌ꎬ张硕ꎬ等.基于渐进三角网的机载LiDAR点云数据滤波[J].武汉大学学报:信息科学版ꎬ2011ꎬ36(10):1159-1163.[4]㊀李卉ꎬ李德仁ꎬ黄先锋ꎬ等.一种渐进加密三角网LiDAR点云滤波的改进算法[J].测绘科学ꎬ2009ꎬ34(3):39-40.[5]㊀ManianVBꎬVegaAꎬVasquezRE.Comparisonoffeatureselectionalogorithmsfortextureimageclassification[J].ProceedingsofSPIE-TheInternationalSocietyforOpticalEngineeringꎬ2001(4388):56-64.[6]㊀王宗跃ꎬ马洪超ꎬ彭检贵ꎬ等.基于LiDAR数据生成光滑等高线[J].武汉大学学报:信息科学版ꎬ2010ꎬ35(11):1318-1321.[7]㊀易俐娜ꎬ许筱ꎬ易琳ꎬ等.LiDAR点云数据处理软件对比研究[J].矿山测量ꎬ2017(6):1-6.[8]㊀陈松尧ꎬ程新文.机载LIDAR系统原理及应用综述[J].测绘工程ꎬ2007ꎬ16(1):27-31.[9]㊀张娟ꎬ张小叶ꎬ曹海春.基于Terrasolid系列软件的机载LiDAR数据后处理[J].图书情报导刊ꎬ2009ꎬ19(26):90-92.[10]㊀罗胜ꎬ姜挺ꎬ王鑫ꎬ等.原始机载LiDAR点云中建筑物激光点的自动提取[J].测绘科学技术学报ꎬ2013ꎬ30(3):269-273.[11]㊀赵一鸣ꎬ李艳华ꎬ商雅楠ꎬ等.激光雷达的应用及发展趋势[J].遥测遥控ꎬ2014ꎬ35(5):4-22.[12]㊀张振涛ꎬ王伟ꎬ苏贵波.激光雷达的现状与发展趋势[J].科技信息ꎬ2012(10):431-431.[13]㊀李斯琼.机载激光雷达数据滤波与建筑物提取方法研究[D].哈尔滨:哈尔滨工业大学ꎬ2012.[14]㊀冯梅ꎬ钟斌.基于LiDAR点云自动生成等高线的方法研究[J].测绘与空间地理信息ꎬ2012ꎬ35(6):87-90.[编辑:张㊀曦]401㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀测绘与空间地理信息㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀2019年。
机载LiDAR技术概述照相测量有着悠久历史,国际照相测量与遥感协会ISPRS (International Society of Photogrammetry and Remote Sensing) 1988 年给照相测量与遥感定义是:照相测量与遥感是从非接触成像和其她传感器系统,通过记录、量测、分析与表达等解决,获取地球及其环境和其她物体可靠信息工艺、科学与技术。
其中照相测量侧重于提取几何信息,遥感侧重于提取物理信息。
也就是说,照相测量是从非接触成像系统,通过记录、量测、分析与表达等解决,获取地球及其环境和其她物体几何、属性等可靠信息工艺、科学与技术。
因而,从19世纪中叶,照相技术一经问世,便应用于测量。
它从模仿照相测量开始,通过解析照相测量阶段,当前己经进入数字照相测量阶段。
当代数字照相测量是老式照相测量与计算机视觉相结合产物,它研究重点是从数字影像自动提取所摄对象空间信息。
诚然,当前科学技术己相称发达,计算机和高新技术己被广泛应用,数字立体照相测量己经成熟,相应软件和数字立体测量工作站己经在生产部门普及,但是照相测量工作流程基本上没有太大变化,如航空照相——照相解决——地而测量(空中三角测量)——立体测量——制图(DLG、DTM、GIS及其她)模式基木没有大变化。
这种生产模式周期明显是太长了,不适应咱们信息社会需求,不能满足“数字地球”对测绘规定了。
LiDAR (LightLaser Detection and Ranging)技术是近数十年来照相测量与遥感领域具革命性成就之一。
自来,LiDAR作为一项成熟高科技技术手段逐渐得到市场采纳和承认。
它融合了激光扫描仪、IMU惯性测量单元、差分GPS以及航飞控制与管理系统等多项高科技技术。
当前, 在欧美发达国家,像美国和德国以及亚洲日本,激光技术己经得到了普遍应用,它应用领域几乎囊括了经济建设各个方面。
1.1LiDAR技术发展历程用激光雷达来精准拟定地而上目的点高度,始于20世纪70年代后期。
机载激光雷达(Lidar)数据采集及数据处理摘要:Lidar是指安装在飞机上的测距与机载激光探测系统,量测地面物体的三维坐标,从而生产Lidar数据影像。
Lidar数据通过相关软件数据处理之后,就能够生成精度较高的数字地面模型DEM、正射影像图和等高线图。
近年来,网络通讯技术、计算机技术、激光测距技术及GPS技术等技术的不断发展成熟,机载激光雷达技术正蓬勃发展,欧美等一些发达国家逐步研制出很多种机载激光雷达测量系统,主要包括 LeicaALS50,Optech等等,它的应用已超国遥感所覆盖的范围和传统测量,成为一种特有的数据获取方式。
一、机载激光雷达机载激光雷达是导航系统、全球定位系统以及激光惯性3种技术集于一身的空间测量系统(如图1)。
此系统是将惯性导航系统、激光扫描仪、GPS接受机、数码相机以及控制元件等搭载在载体的飞机之上。
它主动朝地面发射激光脉冲,接受反射脉冲并对所使用的时间及时记录,计算出激光扫描仪距离地面的距离,POS系统所测得的姿态信息和位置能够计算出地面点的三维坐标。
图1 机载激光雷达系统比较传统的摄影测量,激光雷达可以进行直接获取目标的三维信息,数据到有用信息的过程得以缩短。
激光雷达的明显特征是激光能够穿透植被的叶面抵达地表,同时获取植被和地面的信息,探测细小目标也可以被探测到,从而获取的数据信息丰富,目前来说是其他技术所不及的。
二、数据的采集1、数据采集前准备工作在数据采集之前需要进行多方面详细周密的准备工作,其中主要包括选择检校场、设计航线、申请空域和布设地面基准站。
2、申请空域在任何一个航摄任务执行前要按照规定向有关部门提出空域取得航飞权的申请。
在航飞权期间挑选最好的天气飞行,这样可以使拍摄影像的质量得到保证。
3、航线设计在对航飞路线设计时,要遵循经济、周密、安全和高效的原则,选则专门的航飞设计软件来对飞行路线进行设计。
通常在航线设计时,要参考小比例尺的二维平面地形图,综合的进行测区的地貌、地形、机载激光雷达设备的参数(扫描角、相机镜头焦距、扫描频率等)天气条件(雾、云、烟尘、降雨等等)航带重叠度、航带宽度和用户要求的点云密度考虑,设计出符合项目精度要求的航线。
机载LiDAR和软件Terrasolid(2011-01-05 16:05:03)TerraSolid介绍TerraSolid 系列软件是第一套商业化LiDAR数据处理软件,基于Microstation开发的,运行于Micorstation系统之上,它包括:TerraMatch、TerraScan、TerraModeler、 TerraPhoto、TerraSurvey、TerraPhoto Viewer、TerraScan Viewer、TerraPipe、TerraSlave、TerraPipeNet等模块。
Terrasolid系列产品的载入和浏览功能TerraSolid系列软件能够快速的载入lidar点云数据,在足够内存支持下(2G),载入39000000个点只需要40多秒。
Terrasoild软件因受限于Microstation,浏览起来闪烁较为明显,速度不快。
1、 TerraMatch软件模块自动匹配来自不同航线的航带,它是Terrasoild公司用于调整激光点数据里的系统定向差,测激光面间或者激光面和已知点间的差别并改正激光点数据的软件。
这些差别被转化成系统方向,东向,北向,高程,俯仰角(heading), 横滚角(roll)和倾角(pitch)的改正值。
TerraMatch 能当作激光扫描仪校正工具来用或者当作一个数据质量改正工具。
当把它作为激光扫描仪校正工具用时,它将解决在激光扫描仪和惯性测量装置间未对准问题。
最终将偏角,滚角和倾角的改正值应用到全部的数据中。
实际的工程数据中可能数据源存在错误,TerraMatch可以解决整个数据的改正或对每条航线单独做改正。
主要特征:〃全自动处理激光扫描表面数据的纠正〃方位纠正的严格轨道模型〃最小二乘的定向误差评估调整〃在高程和亮度上的观测是不同的〃采用区域匹配调整激光扫描的几何结构〃采用"Data-snooping"技术检测严重的错误好处:〃自动调整和配置激光数据〃和TerraScan, TerraModeler和TerraPhoto集成处理激光数据2、 TerraScan软件模块TerraScan是TerraSolid公司用来处理LiDAR点云数据的软件。
机载LIDAR系统的原理及结构机载激光雷达(LiDAR)技术,是一种通过位置、距离、角度等观测数据直接获取对象表面点的三维坐标,实现地表信息提取和三维场景重建的对地观测技术。
机载激光雷达系统集成了GPS、IMU、激光扫描仪、数码相机等光谱成像设备。
其中主动传感系统(激光扫描仪)利用返回的脉冲可获取探测目标高分辨率的距离、坡度、粗糙度和反射率等信息,而被动光电成像技术(数码相机)可获取探测目标的数字成像信息,经过地面的信息处理而生成逐个地面采样点的三维坐标,最后经过综合处理而得到沿一定条带的地面区域三维定位与成像结果,如高密度点云数据、高分辨率数字正射影像DOM、各种数字地形模型DTM、表面模型DSM、大比例尺地形图DLG等,并且利用激光LIDAR的高密度点云所形成的数字地表模型经过一定的加工可以制作真正在国土、规划和城市建设管理、以及数字城市建设中可以应用的3D电子沙盘。
传统的航空摄影测量制作技术主要依靠空中三角立体测量技术,依赖航空摄影、摄影处理、地面测量(空中三角测量)、立体测量、制图过程的生产模式,周期明显太长,已经无法适应当前信息社会的需要。
激光雷达(Light Detection And Ranging, LiDAR)技术是现代对地观测的最新技术之一,通过位置、距离、角度等观测数据直接获取对象表面点三维坐标,对地面的探测能力有着强大的优势,具有空间与时间分辨率高、动态探测范围大、地面基站布设少、能够部分穿越树林遮挡、直接获取真实地表的高精度三维信息等特点,是快速获取高精度地形信息的全新手段。
一、机载LIDAR系统的原理机载 LIDAR 系统是一种集激光扫描、GPS\DGPS 和惯性导航系统三种技术于一体的系统,这三种技术的结合,可以高度精确地定位激光束打在物体上的光斑。
激光本身具有非常精确的测距能力,其测距精度可达毫米级。
机载激光雷达系统包括一个单束窄带激光器和一个接收系统。
激光器产生并发射一束光脉冲,打在物体上并反射回来,最终被接收器所接受。
机载激光雷达数据后处理软件(LiDAR_Suite)简介
LiDAR_Suite是武汉天擎空间信息技术有限公司在国家高新技术发展计划项目基础上,开发的具有完全自主知识产权的机载LiDAR 数据后处理软件(如图1)。
图1:LiDAR_Suite 系统界面
LiDAR_Suite 综合考虑了当前机载激光雷达数据处理与应用的实际,形成了一套从原始点云数据到高质量行业产品、成熟高效的机载LiDAR数据处理工艺流程。
LiDAR_Suite 功能齐全,性能稳定,提供了涵盖机载激光雷达数据预处理、基础共性处理和专业应用处理等三个处理层次的丰富功能。
具体包括:
1)机载LiDAR 点云数据、影像、矢量及DEM 等多源空间数据的存取与可视
化,提供了和主流LiDAR 数据处理软件、遥感影像处理软件以及GIS软件的数据接口;
2)机载LiDAR 数据质量控制;机载LiDAR 系统检校、点云数据精度评价
和点云数据的无缝航带拼接;
3)海量点云数据的工程化组织管理及其自动批处理;集群环境下的点云数据快
速处理;
4)多种点云数据的自动滤波、分类算法,基于多模式和多视图的点云编辑精细
分类,多模式和可视化的分类精度评价;
5)基于机载LiDAR 点云的高质量数字高程模型和等高线生产;
6)面向机载LiDAR 同机航空数码相机的整区域快速正射影像生产;机载
LiDAR点云与非同机遥感影像的配准;
7)电力行业应用:电力线提取与建模、电力设施周边地物要素采集、危险点间
距量测等;
8)数字城市应用:独立的子模块Building Modeler,实现城市建筑物三维模型的
自动、半自动建立。
LiDAR_Suite采用了当前机载LiDAR最新数据处理技术,采用了模块化设计思想以及插件集成技术,在可视化、人机交互、易操作性、处理精度与效率等方面与现有商业化的主流机载激光雷达数据处理软件相比均具有一定的技术优势,并提供了灵活方便的、面向行业的二次开发功能。
LiDAR_Suite兼顾了先进算法自动化处理和人机交互的作用,使系统更具实用性;面向专业应用提供了测绘生产、数字城市建模、电力行业应用等功能。
目前,该软件已应用于实际的高精效测绘生产中,完成从原始点云数据到基础测绘产品生产(含DEM、DOM、等高线、部分DLG)以及产品精度评价的全部流程,效果良好(图2为数据生产工程管理示意图,图3为多模式和多视图的点云精细分类编辑示意图,图4为点云自动分类结果,图5为高精度DEM渲染结果,图6为电力悬链线的提取与建模,图7为建筑物半自动建模)。
目前,LiDAR_Suite的生产处理成果已应用于国土、交通、水利等领域,并可望在更多领域如资源、环境、灾害、电力、农林等得到广泛应用。
图2 机载LiDAR数据生产工程管理
图3 多模式和多视图的点云精细分类编辑
图4为点云自动分类结果
图5 高精度DEM渲染模型
图6 电力悬链线的提取与建模
图7 建筑物半自动建模。