单闭环直流调速系统simulink仿真课程设计
- 格式:doc
- 大小:737.00 KB
- 文档页数:17
课程设计单闭环不可逆直流调速系统仿真实验设计指导教师:学院:专业:班级:姓名:学号:目录任务书 (3)概述 (4)原理 (5)建模与参数设置 (12)仿真结果及分析 (16)参考文献 (17)附图 (18)任务书单闭环不可逆直流调速系统仿真实验设计1.画出系统的仿真模型2.主电路的建模和模型的参数设置(1)三相对称交流电压源的建模和参数设置(2)晶闸管整流的建模和参数设置(3)平波电抗器的建模和参数设置(4)直流电动机的建模和参数设置(5)同步脉冲触发器的建模和参数设置3.控制电路的建模和参数设置4.系统的仿真参数设置5.系统的仿真,仿真结果的输出及结果分析6.打印说明书(B5),并交软盘(一组)一张。
注意事项:1.系统建模时,将其分成主电路和控制电路两部分分别进行2.在进行参数设置时,晶闸管整流桥、平波电抗器、直流电动机等的参数设计原则如下:如果针对某个具体参数设置,则对话框的有关参数应取装置的实际值;如果不针对某歌剧厅的装置的一般情况,可先去这些装置的参数默认值进行仿真。
若仿真结果不理想,则通过仿真实验,不断进行参数优化,最后确定其参数。
3.给定信号的变化范围、调节器的参数的反馈检测环节的反馈系数等可调参数的设置,其一般方法是通过仿真试验,不断进行参数优化.4.仿真时间根据实际需要而定,以能够仿真出完整的波形为前提.5.仿真算法的选择:通过仿真实践,从仿真能否进行、仿真的速度、仿真的精度等方面进行选择。
为了提高直流调速系统的动静态性能指标,通常采用闭环系统。
对调速指标要求不高的场合,采用单闭环系统,按反馈的方式不同分为转速反馈、电流反馈、电压反馈、本次设计中采用的为单闭环不可逆直流调速系统。
转速单闭环系统原理如图1所示,图中将反映转速变化的电压信号作为反馈信号,经速度变换后接到电流调节器的输入端,与给定的电压相比较经放大后,得到移相控制电压Uct,用作控制整流桥的触发电路,触发脉冲经功放后加到晶闸管的门极和阴极之间,以改变三象全控整流电路的输出电压,这就构成了速度反馈闭环系统。
综合课程设计说明书题目:单闭环直流调速系统的设计与Matlab仿真(一)学院:机电与汽车工程学院专业班级:电气工程与自动化专业(1)班姓名:学号: 07240113指导教师:目录第一章概述 (2)第二章调速控制系统的性能指标 (3)2.1 直流电动机工作原理 (4)2.2 电动机调速指标 (4)2.3 直流电动机的调速 (5)2.4 直流电机的机械特性 (5)第三章单闭环直流电动机系统 (6)3.1 V-M系统简介 (6)3.2 闭环调速系统的组成及静特性 (7)3.3反馈控制规律 (8)3.4 主要部件 (9)3.5 稳定条件 (11)3.6 稳态抗扰误差分析 (12)第四章单闭环直流调速系统的设计及仿真 (14)4.1 参数设计 (14)4.2 参数计算及MATLAB仿真 (15)第五章总结 (24)参考文献第一章概述电动机是用来拖动某种生产机械的动力设备,所以需要根据工艺要求调节其转速,而用于完成这项功能的自动控制系统就被陈为调速系统。
目前调速系统分为交流调速和直流调速系统,由于直流调速系统的调速范围广、静差率小、稳定性好以及具有良好的动态性能,因此在相当长的时间内,高性能的调速系统几乎都采用直流调速系统,但近年来,随着电子工业与技术的发展,高性能的交流调速系统也日趋广泛。
单闭环直流电机调速系统在现代生活中的应用越来越广泛,其良好的调速性能及低廉的价格越来越被大众接受。
单闭环直流电机调速系统由整流变压器、晶闸管整流调速装置、电动机-发动机、闭环控制系统等组成,我们可以通过改变晶闸管的控制角来调节转速,本文就单闭环直流调速系统的设计及仿真做以下介绍。
第二章调速控制系统的性能指标2.1 直流电动机工作原理一、直流电机的构成(1)定子:主磁极、换向磁极、机座、端盖、电刷装置;(2)转子:电枢铁芯、电枢绕组、换向装置、风扇、转轴;(3)气隙二、直流电机的励磁方式按励磁方式的不同,直流电机可分为他励、并励、串励和复励电动机四种。
直流电机单闭环调速仿真
1252836杨云霄
2015/5/27
1.仿真所得图像
(1)电动机转速n(rpm)曲线:
由电动机信号输出端的输出的ω进行换算而得,可以看出相应速度较快,初始超调量较大,3s时转速稳定在1000rpm,由于仿真要求,在7s时加入转矩为400的负载,使转速略有波动,但很快就回复正常。
可以看到闭环调节的稳定性优势。
(2)电枢电流i a(A)曲线
由电枢电流曲线易得,起始电流较大,处于额定电流的10-20倍之间,经过振荡后恒定保持在0A左右,在7s时加入负载,电流经振荡后恢复0A。
(3)励磁电流i f(A)曲线
根据所给参数励磁电压为240V励磁电阻为120Ω,故励磁电流恒定为2A。
(4)控制电压U c(V)
控制电压是经过ASR比例积分调节后所输出的电压,在本次仿真中,主要是为得到PWM发生器的占空比。

单闭环直流调速系统的设计与仿真实验报告摘要:本文基于基本原理和方法,设计和仿真了一个单闭环直流调速系统。
首先介绍了直流电机调速的基本原理,然后根据系统要求,设计了控制系统的结构和参数,包括PID控制器的参数调整方法。
接下来使用Matlab/Simulink软件进行系统仿真实验,对系统的性能进行评估。
最后根据仿真结果对系统进行分析和总结,并提出了可能的改进方法。
关键词:直流电机调速、单闭环控制系统、PID控制器、仿真实验一、引言直流电机广泛应用于机械传动系统中,通过调节电机的电压和电流实现电机的调速。
在实际应用中,需要确保电机能够稳定运行,并满足给定的转速要求。
因此,设计一个高性能的直流调速系统至关重要。
本文基于单闭环控制系统的原理和方法,设计和仿真了一个直流调速系统。
首先介绍了直流电机调速的基本原理,然后根据系统要求,设计了控制系统的结构和参数,并采用PID控制器进行调节。
接着使用Matlab/Simulink软件进行系统仿真实验,并对系统的性能进行评估。
最后根据仿真结果对系统进行分析和总结,并提出了可能的改进方法。
二、直流电机调速的基本原理直流电机调速是通过调节电机的电压和电流实现的。
电压变化可以改变电机的转速,而电流变化可以改变电机的转矩。
因此,通过改变电机的电压和电流可以实现电机的调速。
三、控制系统设计和参数调整根据系统的要求,设计一个单闭环控制系统,包括传感器、控制器和执行器。
传感器用于测量电机的转速,并将信息传递给控制器。
控制器根据测量的转速和给定的转速进行比较,并调节电机的电压和电流。
执行器根据控制器的输出信号来控制电机的电压和电流。
在本实验中,采用PID控制器进行调节。
PID控制器的输出信号由比例项、积分项和微分项组成,可以根据需要对各项参数进行调整。
调整PID控制器的参数可以使用试错法、频率响应法等方法。
四、系统仿真实验使用Matlab/Simulink软件进行系统仿真实验,建立直流调速系统的模型,并对系统进行性能评估。
【关键字】设计东北大学秦皇岛分校控制工程学院《自动控制系统》课程设计设计题目:转速单闭环直流电机调速系统设计与仿真学生:张海松专业:自动化班级学号:指导教师:王立夫设计时间:2012年6月27日东北大学秦皇岛分校控制工程学院《自动控制系统》课程设计任务书专业:自动化班级:509 学生姓名:设计题目:转速单闭环直流电机调速系统设计与仿真一、设计实验条件实验设备:PC机二、设计任务直流电机额定电压,额定电枢电流,额定转速,电枢回路总电阻,电感,励磁电阻,励磁电感,互感,,允许过载倍数。
晶闸管装置放大系数:,时间常数:,设计要求:对转速环进行设计,并用Matlab仿真分析其设计结果。
目录绪论--------------------------------------------------------------------------------11.转速单闭环调速系统设计意义-----------------------------12.原系统的动态结构图及稳定性的分析-----------------------22.1 转速负反应单闭环控制系统组成-----------------------22.2 转速负反应单闭环控制系统的工作原理-----------------33.调节器的选择及设计-------------------------------------33.1调节器的选择- --------------------------------------33.2 PI调节器的设计--- ---------------------------------44.Mat lab仿真及结果分析----------------------------------74.1 simulink实现上述直流电机模型-----------------------74.2 参数设置并进行仿真---------------------------------74.3结果分析--------------------------------- ---------155.课设中遇到的问题--------------------------------------166.结束语- ---------------------------------------------17参考文献- ---------------------------------------------17转速单闭环直流电机调速系统设计与仿真绪论直流电动机由于调速性能好,启动、制动和过载转矩大,便于控制等特点,是许多高性能要求的生产机械的理想电动机。
单闭环直流调速系统课程设计1. 引言单闭环直流调速系统是电力工程中常见的一种控制系统,用于控制直流电机的转速。
本文将对单闭环直流调速系统进行课程设计,包括系统建模、控制器设计、仿真分析等内容。
2. 系统建模2.1 直流电机模型首先,我们需要对直流电机进行建模。
直流电机可以简化为一个电动势源、一个电阻和一个反电动势。
根据基尔霍夫定律和欧姆定律,可以得到直流电机的数学模型如下:V a=I a R a+k eωm其中,V a为输入电压,I a为输入电流,R a为线圈电阻,k e为反电动势系数,ωm为转速。
2.2 转速传感器模型在实际应用中,我们通常使用转速传感器来测量转速。
假设转速传感器测得的转速为ωr,则有:ωr=k tωm其中,k t为传感器系数。
2.3 控制器模型为了实现对直流电机转速的调节,我们需要设计一个控制器。
这里我们选择PID控制器作为控制器的模型。
PID控制器的输出为控制电压V c,根据PID控制器的定义,有:V c=K p(ωr∗−ωr)+K i∫(ωr∗−ωr)t0dt+K dddt(ωr∗−ωr)其中,K p、K i、K d分别为比例、积分和微分系数,ωr∗为期望转速。
3. 控制器设计3.1 参数整定方法在实际应用中,我们需要根据系统的要求来确定PID控制器的参数。
常用的参数整定方法有经验法、试误法和自整定法等。
这里我们选择试误法进行参数整定。
首先,将PID控制器中的积分项和微分项置零,只保留比例项。
通过调节比例系数K p,观察系统响应特性。
如果系统过冲较大,则减小比例系数;如果系统响应较慢,则增大比例系数。
接下来,在合适的比例系数下,将积分项和微分项逐渐引入,并调节相应的系数。
最终得到满足要求的PID控制器参数。
3.2 仿真分析为了验证所设计的控制器的性能,我们进行仿真分析。
选择合适的仿真软件,建立单闭环直流调速系统的数学模型,并将所设计的控制器加入系统中。
通过对不同输入信号(如阶跃信号、正弦信号等)的响应分析,可以评估控制系统的性能。
《自动控制》课程论文姓名:王耀明学号:14082101440(35)2011年12月15日目录1 绪论 (3)1.1 选题依据 (3)1.2 题目要求介绍 (3)1.3 论文主要完成的工作 (3)2 系统原理 (3)2.1 系统简介 (3)2.2 系统的整体设计 (4)2.2.1 转速闭环调速环节简介 (4)2.2.2 无静差调速环节简介 (4)2.2.3 电流截止负反馈简介 (5)2.3 参数计算 (5)2.4 系统的静态结构框图 (6)3 系统仿真 (6)3.1 仿真软件MATLAB简介 (6)3.2 仿真模型 (6)3.3 系统仿真图 (7)4 总结 (8)参考文献 (8)单闭环无静差直流调速系统仿真研究1 绪论1.1 选题依据在生产中,很多设备都需要用直流电机进行拖动。
为了保证产品质量,提高生产效率,要求这些设备在不同的场合能以不同的速度工作,或者要求在变化的负载下能保持设定的速度。
在调整生产设备的速度时,不仅要求能保证达到最高与最低速度,还要求有一定的调速精度,而单闭环无静差直流调速系统便可实现这一动态与稳态性能要求。
1.2 题目要求介绍第1组电动机参数:功率kw P N 18=,额定电压v U N 220=,额定电流A I N 94=,额定转速min /0001r n N =,电枢电阻Ω=0.15a R ,主电路总电阻Ω=0.45R ,40=s k 。
最大给定电压v U nm 15*=,整定电流反馈电压v U im 10=。
要求系统调速范围D=20,静差率≤10%,N dbl I I 5.1=,N dcr I I 1.1=。
1.3 论文主要完成的工作✧ 单闭环调速系统的组成和各环节的介绍;✧ 参数计算,依据以上参数和指标要求完成单闭环调速系统相关参数计算✧ 画出调速系统电路原理图和静态结构图✧ 根据参数计算结果,在MATLAB 上仿真实现,检验调速系统的动,静态性能指标。
论文中要附有调速系统在启动过程中电流和转速变化的仿真图,如有需要,应加入电流截止负反馈。

单闭环直流调速系统的设计与仿真实验报告标准化管理部编码-[99968T-6889628-J68568-1689N]比例积分控制的单闭环直流调速系统仿真一、实验目的1.熟练使用MATLAB 下的SIMULINK 仿真软件。
2.通过改变比例系数K K 以及积分时间常数τ的值来研究K K 和τ对比例积分控制的直流调速系统的影响。
二、实验内容1.调节器的工程设计 2.仿真模型建立 3.系统仿真分析三、实验要求建立仿真模型,对参数进行调整,从示波器观察仿真曲线,对比分析参数变化对系统稳定性,快速性等的影响。
四、实验原理图4-1 带转速反馈的闭环直流调速系统原理图调速范围和静差率是一对互相制约的性能指标,如果既要提高调速范围,又要降低静差率,唯一的方法采用反馈控制技术,构成转速闭环的控制系统。
转速闭环控制可以减小转速降落,降低静差率,扩大调速范围。
在直流调速系统中,将转速作为反馈量引进系统,与给定量进行比较,用比较后的偏差值进行系统控制,可以有效的抑制甚至消除扰动造成的影响。
当t=0时突加输入K in 时,由于比例部分的作用,输出量立即响应,突跳到K ex (K )=K K K in ,实现了快速响应;随后K ex (K )按积分规律增长,K ex (K )=K K K in +(K /τ)K in 。
在K =K 1时,输入突降为0,K in =0,K ex (K )=(K 1/τ)K in ,使电力电子变换器的稳态输出电压足以克服负载电流压降,实现稳态转速无静差。
五、实验各环节的参数及K K和1/τ的参数的确定各环节的参数:直流电动机:额定电压K N=220V,额定电流K dN=55A,额定转速K N=1000r/min,电动机电动势系数K e= min/r。
假定晶闸管整流装置输出电流可逆,装置的放大系数K s=44,滞后时间常数K s=。
电枢回路总电阻R=Ω,电枢回路电磁时间常数K l=电力拖动系统机电时间常数K m=。
利用Simulink 仿真直流伺服电机的闭环位置控制系统 一直流伺服电机传递函数及参数选择直流电机的工作转矩等于负载转矩与负载惯性系统加、减速转矩之和,表达式为: 1()()()()L a d t M t M t J J dtω=++。
其中,()M t 为电动机输出转矩,N m ⋅;()L M t 为负载转矩,N m ⋅;()t ω为电动机角速度,1rad s -⋅;a J 为电动机电枢转动惯量,322.210a J kg m -=⨯⋅;1J 为负载的转动惯量,需将移动工作台的惯性转换到电机轴上,取2321()510,2z h J m kg m π-=⋅≈⨯⋅h 为丝杠螺距,z m 为工作台质量。
电机电路处于动态过程时,对线圈施加的电源电压()a u t 和电枢线圈内通过的电流()a i t 的关系为:()()()()()a a a a ab di t u t R i t L e t d t =++。
其中,a R 为电机电枢线圈内阻,a R =20Ω;a L 为电机电枢线圈的电感,a L =2H ;()b e t 为电机电枢线圈在定子磁场中运动时产生的反电动势。
电机输出转矩()M t 应与通过电枢线圈的电流大小成正比,则()()T a M t K i t =。
其中,T K 为电机输出扭矩常数,T K =15N m A -⋅⋅。
电机电枢线圈产生的反电动势()b e t 与电枢的工作角速度()t ω成正比,故有:()()b b e t K t ω=。
其中,b K 为电机电枢反电动势系数,10.0498b K V rad -=⋅。
我们分别将上述的算式进行拉普拉斯变换,并令初始条件为零,则有:1()()()()L a M s M s J J s s =++Ω;()()()()a a a a b U s R sL I s E s =++;()()T a M s K I s =;()()b b E s K s =Ω。
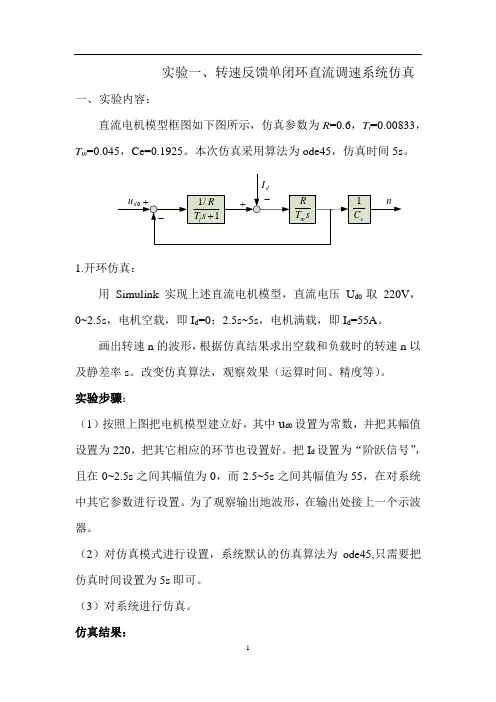
实验一、转速反馈单闭环直流调速系统仿真一、实验内容:直流电机模型框图如下图所示,仿真参数为R=0.6,T l=0.00833,T m=0.045,Ce=0.1925。
本次仿真采用算法为ode45,仿真时间5s。
1.开环仿真:用Simulink实现上述直流电机模型,直流电压U d0取220V,0~2.5s,电机空载,即I d=0;2.5s~5s,电机满载,即I d=55A。
画出转速n的波形,根据仿真结果求出空载和负载时的转速n以及静差率s。
改变仿真算法,观察效果(运算时间、精度等)。
实验步骤:(1)按照上图把电机模型建立好,其中u d0设置为常数,并把其幅值设置为220,把其它相应的环节也设置好。
把I d设置为“阶跃信号”,且在0~2.5s之间其幅值为0,而2.5~5s之间其幅值为55,在对系统中其它参数进行设置。
为了观察输出地波形,在输出处接上一个示波器。
(2)对仿真模式进行设置,系统默认的仿真算法为ode45,只需要把仿真时间设置为5s即可。
(3)对系统进行仿真。
仿真结果:(1)仿真算法为ode45:图1 上图即为电机转速的仿真结果图,同图上我们可以看出来分为了两个阶段,其中第一个阶段(0~2.5s)为空载转速,第二阶段(2.5~5s)为满载转速。
空载转速为1142n/min。
在2.5s时加入了负载,通过仿真结果我们可以看出来,负载转速为972n/min。
这可以看出来在加入负载之后,电机的转速开始下降。
根据电机转差率的公式s=(n0-n)/ n0=(1142-972)/1142=0.149。
转差率还是比较小的,说明该电机效率比较高。
通过观察该仿真的时间,其运算时间为T=9.134*10^-7s。
(2)仿真算法为ode23:仿真结果图如图2所示,由图我们可以看出来,结果基本上和计算方法为ode45的结果一样,但是运算时间却不一样,该算法的运算时间为T=3.636*10^-7s。
运算时间比ode45的时间短。
基于Simulink的直流调速系统的设计与仿真摘要调速系统做为当今电力拖动自动控制系统中应用最广泛的一种系统,随着生产工艺、产品质量要求不断提高和产量的增长,使得越来越多的生产机械要求能实现自动调速。
当前控制系统已进入了计算机时代,在许多领域已实现了智能化控制。
直流调速系统凭借优良的调速特性,调速平滑、范围宽、精度高、过载能力大、动态性能好、易于控制以及良好的起、制动性能等优点,能满足生产过程自动化系统中各种不同的特殊运行要求,所以研究直流调速系统有着十分必要和重要的意义。
本文以直流调速系统为主要研究对象,首先阐明了该课题研究的目的与意义,具体介绍了开环,单闭环和双闭环直流调速系统的设计和建立Matlab/Simulink 仿真模型的过程,得出转速及电流的仿真波形并与理想启动的转速及电流波形做对比。
分析并比较开环,单闭环和双闭环的优缺点。
关键词:直流调速系统;Simulink;开环;单闭环;双闭环DC SPEED CONTROL SYSTEM BASED ON SIMULINK DESIGN AND SIMULINKAbstractAs today's electric drive speed control system automatic control system of the most widely used system, with the production process, and continuously improve product quality requirements and production growth, making more and more production machinery required to achieve automatic speed . Current control system has entered the computer age, has been achieved in many areas of intelligent control. DC drive system with excellent speed characteristics, smooth speed, wide range, high precision, large overload capacity, good dynamic performance, easy to control and good starting and braking performance, etc., can meet the production process automation system each different kinds of specific operational requirements, the study DC speed control system has a very necessary and important.In this paper, DC speed control system as the main research object, first to clarify the purpose and significance of the research, specifically describes the open-loop, single-loop and double-loop DC speed control system design and build Matlab / Simulink simulation model of the process, too the speed and current simulation waveform and the ideal starting speed and current waveforms do comparison. Analyze and compare the open-loop, single loop and double loop advantages and disadvantages. Experimental results show that the simulation speed performance with consistent theoretical derivation.Keywords: DC speed control system;Open-loop system;Single-loop system;Double-loop system目录摘要.......................................................... Abstract .. (I)1绪论 01.1 课题背景 01.2概述 01.3论文内容 (1)1.4本章小结 (1)2直流调速系统的理论基础 (2)2.1 Matlab/Simulink仿真软件 (2)2.2 直流调速的理论基础 (2)2.3 开环系统的电气原理 (5)2.4 单闭环系统的电气原理 (6)2.5 双闭环系统的电气原理 (7)2.6 本章小结 (7)3 调速系统的建模与仿真 (7)3.1 开环调速系统的建模与仿真 (8)3.1.1 开环建模过程 (8)3.1.2 开环系统的仿真 (11)3.2 单闭环调速系统的建模与仿真 (13)3.2.1 单闭环系统的建模 (13)3.2.2 单闭环系统的仿真 (15)3.3 双闭环调速系统的建模与仿真 (17)3.3.1 双闭环系统的建模 (17)3.3.2 双闭环系统的仿真 (19)3.4 本章小结 (21)4 结论与展望 (23)致谢 (24)参考文献 (25)1绪论1.1 课题背景现代化的工业过程中,几乎无处不使用电力传动装置,尤其是在石油,化工,冶金,轻工,机械等工业生产中对电动机的控制更是起着举足轻重的作用[1]。
转速反馈单闭环直流调速系统仿真题目:转速反馈单闭环直流调速系统仿真直流电机模型框图如下图所示,仿真参数为R =0.4,T l =0.00833,T m =0.045,Ce=0.25。
本次仿真采用算法为ode45,仿真时间3s 。
图1 直流电机模型1、开环仿真:用Simulink 实现上述直流电机模型,直流电压U d0取500V ,0~1.5s ,电机空载,即I d =0;1.5s~3s ,电机满载,即I d =100A 。
画出转速n 的波形,根据仿真结果求出空载和负载时的转速n 以及静差率s 。
改变仿真算法,观察效果(运算时间、精度等)。
cde45 cde23空载转速n=2000r/min 负载转速n=1840r/min静差率s=(2000-1840)/2000=0.08使用各种算法对于本例来说差别不大,各算法所用时间如下所示。
ode45 3.011s ode 23 2.493s ode 113 2.406s由此可见,ode45算法运算时间较长,ode23与ode113的时间较短,查阅资料发现ode45仿真精度最高,ode23与ode113cde113 精度较低。
2、闭环仿真:在上述仿真基础上,添加转速闭环控制器,转速指令为2000rpm,0~1.5s,电机空载,即I d=0;1.5s~3s,电机满载,即I d=100A。
(1)控制器为比例环节:试取不同k p值,画出转速波形,求稳态时n和s并进行比较。
Kp=1 Kp=2Kp=4 Kp=8稳态时的转速n由图中表格可以读出,分别是1568r/min、1760 r/min、1874 r/min、1932 r/min。
静差率分别为0.01854、0.1001、0.00435、0.00408。
(2)控制器为比例积分环节,设计恰当的k p和k I值,画出转速波形、电机端电压波形和电枢绕组电流波形,求出静差率、超调量、响应时间和抗扰性。
结合《自动控制原理》相关知识,对结果进行分析。
直流调速系统及其仿真
首先,我先大致讲一下电机调速的基本原理:
01()d d n a U E I R R R =+++(1)
e e E C n K n ==Φ(2)
3) 直流他励电动机供电原理图 (1) (2) (3) V-M
n U n n U U =放大器p n U K U
晶闸管整流器及触发装置U V-M 式中,p K 为放大器的电压放大系数;s K 为晶闸管整流器及触发装置的电压放大系数;
2α为反馈电位器分压比;etg C 为测速发电机额定磁通下的电动势转速比;2etg C αα=为转速反馈系数。
以上就是单电机比较简单的理论,下面我要向大家介绍一下无静差转速负反馈调速系统的构成、建模及仿真。
单闭环无静差转速负反馈调速系统的电气原理图如图所示:
系统的建模包括主电路的建模和控制电路的建模两部分。
该系统由给定、速度调节器、同步脉冲触发器、晶闸管整流桥、平波电抗器、直流电动机、速度给定环节、限流环节等部分组成。
(一)
三相交流电源
A 超前C120度,C 超前B120度。
同步脉冲触发器和封装之后的子系统符号
六脉冲触发器需要用三相线电压同步,所以同步电源的任务是将三相交流电源的相电压转换成线电压。
图中
触发器开关信号block 为0时,开放触发器;为1时,封锁触发器。
晶闸管整流桥及其参数设置
直流电机模块
PID 模块及其参数设置
PI 的控制器可以通过现有的PID 模块进行设置。
限幅器模块及其参数设置
通过对ct U 参数变化范围的探索而知:在单闭环无静差系统中,当ct U 在110~207范围内变化时,同步脉冲
为样。
(二)
(三)。
目 录一、摘要.......................................................... - 3 -二、课程设计任务.................................................................................................................. - 3 -三、课程设计内容.................................................................................................................. - 3 -1、PID控制原理及PID参数整定概述............................................................................. - 3 -2、基于稳定边界法(临界比例法)的PID控制器参数整定算法 ................................ - 5 -3、利用Simulink建立仿真模型...................................................................................... - 8 -4、参数整定过程.............................................................................................................. - 12 -5、调试分析过程及仿真结果描述.................................................................................. - 16 -四、总结.................................................................................................................................. - 17 -五、参考文献......................................................................................................................... - 17 -PI控制单闭环直流调速系统仿真设计班级:自动化 学号: 姓名:一、摘要本文通过利用Matlab仿真平台设计单闭环直流调速系统,,包括单闭环直流调速系统的基本构成和工作原理、对所设计系统的静态性能指标和动态性能指标进行分析、根据动态性能指标设计调节器、根据设计任务书的具体要求设计出系统的Simulink仿真模型,验证所设计系统的性能,通过稳定边界法(临界比例度法)整定PID参数,从而达到较好的控制性能要求,在这种实践的学习和调试中,使学生更系统地掌握所学知识并能够应用运动控制系统设计规范、Matla-simulin建模方法步骤、计算手册和计算机辅助设计软件进行运动控制系统的结构设计和参数计算。
单闭环直流调速系统的设计与仿真实验报告4比例积分控制的单闭环直流调速系统仿真一、实验目的1.熟练使用MATLAB 下的SIMULINK 仿真软件。
2.通过改变比例系数以及积分时间常数τ的值来研究和τ对比例积分控制的直流调速系统的影响。
二、实验内容1.调节器的工程设计2.仿真模型建立3.系统仿真分析三、实验要求建立仿真模型,对参数进行调整,从示波器观察仿真曲线,对比分析参数变化对系统稳定性,快速性等的影响。
四、实验原理图4-1 带转速反馈的闭环直流调速系统原理图调速范围和静差率是一对互相制约的性能指标,如果既要提高调速范围,又要降低静差率,唯一的方法采用反馈控制技术,构成转速闭环的控制系统。
转速闭环控制可以减小转速降落,降低静差率,扩大调速范围。
在直流调速系统中,将转速作为反馈量引进系统,与给定量进行比较,用比较后的偏差值进行系统控制,可以有效的抑制甚至消除扰动造成的影响。
当t=0时突加输入时,由于比例部分的作用,输出量立即响应,突跳到,实现了快速响应;随后按积分规律增长,。
在时,输入突降为0,=0,= ,使电力电子变换器的稳态输出电压足以克服负载电流压降,实现稳态转速无静差。
五、实验各环节的参数及和1/τ的参数的确定5.1各环节的参数:直流电动机:额定电压=220V,额定电流=55A,额定转速=1000r/min,电动机电动势系数=0.192V •min/r。
假定晶闸管整流装置输出电流可逆,装置的放大系数=44,滞后时间常数=0.00167s。
电枢回路总电阻R=1.0Ω,电枢回路电磁时间常数=0.00167s 电力拖动系统机电时间常数=0.075s。
转速反馈系数=0.01V •min/r。
对应额定转速时的给定电压=10V。
稳态性能指标D=20,s 5% 。
5.2 和1/τ的参数的确定:PI调节器的传递函数为其中,。
(1)确定时间常数1)整流装置滞后时间常数;2)转速滤波时间常数;3)转速环小时间常数;(2)计算参数按跟随和抗扰性都较好的原则,取h=5,则调节器超前时间常数,即积分时间常数:,则由此可得开环增益:于是放大器比例放大系数:六、仿真模型的建立如图6-1为比例积分控制的无静差直流调速系统的仿真框图,根据仿真框图,利用MATLAB下的SMULINK软件进行系统仿真,建立的仿真模型如图6-2所示。
目录一、摘要.......................................................... - 3 -二、课程设计任务.................................................................................................................. - 3 -三、课程设计内容.................................................................................................................. - 3 -1、PID控制原理及PID参数整定概述............................................................................. - 3 -2、基于稳定边界法(临界比例法)的PID控制器参数整定算法 ................................ - 5 -3、利用Simulink建立仿真模型...................................................................................... - 8 -4、参数整定过程.............................................................................................................. - 12 -5、调试分析过程及仿真结果描述.................................................................................. - 16 -四、总结.................................................................................................................................. - 17 -五、参考文献......................................................................................................................... - 17 -PI控制单闭环直流调速系统仿真设计班级:自动化学号:姓名:一、摘要本文通过利用Matlab仿真平台设计单闭环直流调速系统,,包括单闭环直流调速系统的基本构成和工作原理、对所设计系统的静态性能指标和动态性能指标进行分析、根据动态性能指标设计调节器、根据设计任务书的具体要求设计出系统的Simulink仿真模型,验证所设计系统的性能,通过稳定边界法(临界比例度法)整定PID参数,从而达到较好的控制性能要求,在这种实践的学习和调试中,使学生更系统地掌握所学知识并能够应用运动控制系统设计规范、Matla-simulin建模方法步骤、计算手册和计算机辅助设计软件进行运动控制系统的结构设计和参数计算。
在对调速性能有较高要求的领域,如果直流电动机开环系统稳态性能不满足要求,可利用速度负反馈提高稳态精度,而采用比例调节器的负反馈调速系统仍是有静差的,为了消除系统的静差,可利用积分调节器代替比例调节器。
通过对单闭环调速系统的组成部分可控电源、由运算放大器组成的调节器、晶闸管触发整流装置、电机模型和测速电机等模块的理论分析,比较原始系统和校正后系统的差别,得出直流电机调速系统的最优模型。
然后用此理论去设计一个实际的调速系统,并用MATLAB 仿真进行正确性的验证。
二、课程设计任务已知单闭环直流调速系统如图所示(1)请采用试凑法或稳定边界法整定两个PI控制器的参数,使系统稳定的前提下快速性好,并对整个系统进行仿真。
(2)请采用试凑法或稳定边界法整定两个PI控制器的参数,使系统稳定的前提下超调量小,并对整个系统进行仿真。
三、课程设计内容1、PID控制原理及PID参数整定概述PID控制原理:在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。
PID控制器问世至今已有近70年历史,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。
当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型时,控制理论的其它技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便。
即当我们不完全了解一个系统和被控对象,或不能通过有效的测量手段来获得系统参数时,最适合用PID控制技术。
PID控制,实际中也有PI和PD控制。
PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的。
比例(P)控制比例控制是一种最简单的控制方式。
其控制器的输出与输入误差信号成比例关系。
偏差一旦产生,控制器立即就发生作用即调节控制输出,使被控量朝着减小偏差的方向变化,偏差减小的速度取决于比例系数Kp,Kp越大偏差减小的越快,但是很容易引起振荡,尤其是在迟滞环节比较大的情况下,Kp减小,发生振荡的可能性减小但是调节速度变慢。
但单纯的比例控制存在稳态误差不能消除的缺点。
这里就需要积分控制。
积分(I)控制在积分控制中,控制器的输出与输入误差信号的积分成正比关系。
对一个自动控制系统,如果在进入稳态后存在稳态误差,则称这个控制系统是有稳态误差的或简称有差系统。
为了消除稳态误差,在控制器中必须引入“积分项”。
积分项对误差取决于时间的积分,随着时间的增加,积分项会增大。
这样,即便误差很小,积分项也会随着时间的增加而加大,它推动控制器的输出增大使稳态误差进一步减小,直到等于零。
因此,比例+积分(PI)控制器,可以使系统在进入稳态后无稳态误差。
实质就是对偏差累积进行控制,直至偏差为零。
积分控制作用始终施加指向给定值的作用力,有利于消除静差,其效果不仅与偏差大小有关,而且还与偏差持续的时间有关。
简单来说就是把偏差积累起来,一起算总帐。
微分(D)控制在微分控制中,控制器的输出与输入误差信号的微分(即误差的变化率)成正比关系。
自动控制系统在克服误差的调节过程中可能会出现振荡甚至失稳。
其原因是由于存在有较大惯性组件(环节)或有滞后组件,具有抑制误差的作用,其变化总是落后于误差的变化。
解决的办法是使抑制误差的作用的变化“超前”,即在误差接近零时,抑制误差的作用就应该是零。
PID参数整定概述:PID控制器的参数整定是控制系统设计的核心内容。
它是根据被控过程的特性确定PID控制器的比例系数、积分时间和微分时间的大小。
PID 控制器参数整定的方法很多,概括起来有两大类:一是理论计算整定法。
它主要是依据系统的数学模型,经过理论计算确定控制器参数。
这种方法所得到的计算数据未必可以直接用,还必须通过工程实际进行调整和修改。
二是工程整定方法,它主要依赖工程经验,直接在控制系统的试验中进行,且方法简单、易于掌握,在工程实际中被广泛采用。
PID控制器参数的工程整定方法,主要有稳定边界法(临界比例法)、反应曲线法和衰减法。
三种方法各有其特点,其共同点都是通过试验,然后按照工程经验公式对控制器参数进行整定。
但无论采用哪一种方法所得到的控制器参数,都需要在实际运行中进行最后调整与完善。
PID参数整定口诀:参数整定找最佳,从小到大顺序查先是比例后积分,最后再把微分加曲线振荡很频繁,比例度盘要放大曲线漂浮绕大湾,比例度盘往小扳曲线偏离回复慢,积分时间往下降曲线波动周期长,积分时间再加长曲线振荡频率快,先把微分降下来动差大来波动慢。
微分时间应加长理想曲线两个波,前高后低4比1一看二调多分析,调节质量不会低2、基于稳定边界法(临界比例法)的PID控制器参数整定算法使用稳定边界法整定PID参(Z-N Method)分为以下几步:1)将积分系数KI和微分系数KD设为0,KP置较小值,使系统投入稳定运行。
2)逐渐增大比例系数 KP,直到系统出现稳定等幅振荡,即临界振荡过程。
记录此时的KP和临界振荡的振荡周期T。
3)按照下表的经验公式以及对应的调节器类型整定相应的PID参数,然后再进行仿真校验和微调。
具体步骤:1)在Simulink下搭建系统框图如下2)设置PID参数名称其仿真环境参数分别双击三个Gain元件,并在弹出的对话框中填入相应的变量名,比如Kp,Ki。
在仿真环境设置中将“Stop Time”设为1.0,“Relative tolerance”设为1e-5。
3)初始化参数并逐步整定PID参数在MATLAB的Command Window输入:Kp=1;Ki=0;然后回到Simulink界面,就可以开始仿真了。
初始参数的意义即相当于没有PID调节器的校正前系统。
点击Start开始仿真。
3、利用Simulink建立仿真模型Simulink 中的“Simu”一词表示可用于计算机仿真,而“Link”一词表示它能进行系统连接,即把一系列模块连接起来,构成复杂的系统模型。
作为MATLAB 的一个重要组成部分,Simulink由于它所具有的上述的两大功能和特色,以及所提供的可视化仿真环境、快捷简便的操作方法,而使其成为目前最受欢迎的仿真软件。
Simulink建模步骤1)启动Simulink。
单击MATLAB Command窗口工具条上的Simulink图标,或者在MATLAB命令窗口输入simulink,即弹出图示的模块库窗口界面(Simulink Library Browser)。
该界面右边的窗口给出Simulink所有的子模块库。
2) 打开空白模型窗口模型窗口用来建立系统的仿真模型。
只有先创建一个空白的模型窗口,才能将模块库的相应模块复制到该窗口,通过必要的连接,建立起Simulink仿真模型。
也将这种窗口称为Simulink仿真模型窗口。
以下方法可用于打开一个空白模型窗口:➢在MATLAB主界面中选择【File:New→Model】菜单项;➢单击模块库浏览器的新建图标;➢选中模块库浏览器的【File : New → Model】菜单项。
所打开的空白模型窗口如图所示。
3)建立Simulink仿真模型打开Simulink模型窗口(Untitled)选取模块或模块组,在Simulink模型或模块库窗口内,用鼠标左键单击所需模块图标,图标四角出现黑色小方点,表明该模块已经选中。
添加模块:右键ADD添加到模型窗口。