GPS坐标时间序列论文文献综述DOC
- 格式:doc
- 大小:844.51 KB
- 文档页数:18

文献综述:GPS在道路测量中的应用近年来,全球位置系统(GPS)技术在交通运输中的应用越来越广泛。
GPS设备可以用于改善道路和交通安全,提高车辆效率以及测量道路和道路设施。
本文旨在综述当前GPS在道路测量中的应用,包括GPS在道路测量中的优势、GPS测量的基本原理、GPS测量在道路建设与道路维护等方面的应用。
GPS在道路测量中的优势全球定位系统的主要优势在于其准确性和易用性。
GPS能够在很短的时间内准确测量大量数据,同时它非常易于使用。
GPS测量在短时间内可以测量大量数据,节省大量人力物力。
此外,GPS提供的数据强大,并且使用简单,容易理解。
同时,GPS设备不受天气的影响,可以在各种环境下使用,可以在降雨、雾和夜间使用。
GPS的优势还在于,它可以让我们实时获得数据。
在道路测量中,GPS设备可以立即测量道路宽度和长度、道路拐弯情况、坡度、车道数量和轮廓等信息。
这使得我们在准备道路建设和道路维护计划时能够获得实时情况并立即做出正确和准确的决策。
GPS测量的基本原理GPS定位系统基于卫星测量信号的三角测量原理。
GPS设备中包括多个卫星接收机,这些接收机接收由卫星发送的信号,计算位置的三维坐标。
这是通过计算卫星信号需要经过的时间以及每个卫星与接收器之间的距离来实现的。
通过测量通过卫星发送的信号,GPS设备可以确定三个特定的数据点:空间坐标、测距和导航。
空间坐标,即全球位置,是GPS接收器最终计算出的三维坐标。
测距是指两个定位计算之间的距离。
导航是通过GPS设备确定运输行程,如车行、船行和飞行。
GPS测量在道路建设与道路维护中的应用道路测量GPS在道路测量中的应用包括测量道路宽度和长度、道路拐弯情况、坡度、车道数量和轮廓等信息。
通过这些测量数据,交通工程师可以更准确地规划和设计道路。
道路建设进行道路建设时,GPS在土方建设和边坡工作中也有很大的应用价值。
GPS测量可以在土壤/石料调整时,监测各碎料厚度,并确保工程的平整度,保证建成道路的质量。

文献综述摘要:通过对数据一系列处理,运用三阶自回归AR(3)模型拟合gps坐标时间序列,由于gps坐标时间序列数据之间的相关关系,且历史数据对未来的发展有一定影响,并对未来的电力增长进行预测。
理论准备:拿到一个观测值序列之后,首先要判断它的平稳性,通过平稳性检验,序列可分为平稳序列和非平稳序列两大类。
如果序列值彼此之间没有任何向关性,那就意味着该序列是一个没有任何记忆的序列,过去的行为对将来的发展没有丝毫影响,这种序列我们称之为纯随机序列,从统计分析的角度而言,纯随机序列式没有任何分析价值的序列。
如果序列平稳,通过数据计算进行模型拟合,并利用过去行为对将来的发展预测,这是我们所期望得到的结果。
可采用下面的流程操作。
关键字:gps坐标时间序列时间序列分析数据预测一、前言GPS坐标时间序列分析原来是“概率论与数理统计”领域当中的一个重要分支,其中有国际著名的学术杂志“时间序列分析”。
由于在过去的二十几年当中,时间序列分析方法在经济学的定量分析当中获得了空前的成功应用,因此所出现的“时间序列计量经济学”已经成为了“实证宏观经济学”的同意语或者代名词。
由此可见,作为宏观经济研究,甚至已经涉及到微观经济分析,时间序列分析方法是十分重要的。
时间序列分析方法之所以在经济学的实证研究中如此重要,其主要原因是经济数据大多具有时间属性,都可以按照时间顺序构成时间序列,而时间序列分析正是分析这些时间序列数据动态属性和动态相关性的有力工具。
从一些典型的研究案例中可以看出,时间序列分析方法在揭示经济变量及其相关性方法取得了重要进展。
目前关于时间序列分析的教科书和专著很多。
仅就时间序列本身而言的理论性论著也很多,例如本课程主要参考的Hamilton的“时间序列分析”,以及Box 和Jankins的经典性论著“时间序列分析”;近年来出现了两本专门针对经济学和金融学所编写的时间序列专著,这也是本课程主要参考的教材。
另外需要注意的是,随着平稳性时间序列方法的成熟和解决问题所受到的局限性的暴露,目前研究非平稳时间序列的论著也正在出现,其中带有结构性特征的非平稳时间序列分析方法更是受到了广泛重视。
![gps论文[1]2篇](https://img.taocdn.com/s1/m/091e88d3afaad1f34693daef5ef7ba0d4b736d5a.png)
gps论文GPS(全球定位系统)是一种卫星导航系统,用于确定地球上任意点的位置和时间。
它由一组卫星、接收器和控制站组成,可以为用户提供准确的定位、导航和时间服务。
本论文将探讨GPS的原理、应用以及对社会的影响。
第一篇:GPS的原理和技术GPS系统是一种由美国建立和维护的全球性导航卫星系统。
它由约30颗工作卫星组成,这些卫星环绕地球运行,并通过无线电信号与地面上的接收器进行通信。
GPS接收器通过接收来自多颗卫星的信号,并对这些信号进行处理,以确定接收器的位置、速度和时间。
GPS的原理是基于距离测量的三角定位原理。
接收器通过接收卫星发送的无线电信号,并记录信号的到达时间。
由于信号的传播速度已知,接收器可以根据信号的到达时间计算接收器与卫星之间的距离。
通过至少三颗卫星的信号,接收器可以确定自身的位置,并通过更多的卫星信号提高定位精度。
GPS系统的技术主要有信号传输、卫星轨道、接收器系统和数据处理。
信号传输使用无线电波作为信息传输介质,通过射频技术在卫星和接收器之间进行通信。
卫星轨道是GPS系统的关键部分,它决定了卫星的分布和运行轨迹,以确保卫星可以覆盖地球的各个区域。
接收器系统由接收器硬件和软件组成,可以接收、处理和分析卫星信号。
数据处理涉及对接收器记录的信号进行计算和分析,从而确定接收器的位置和时间。
GPS的应用十分广泛。
它可以用于导航系统,为用户提供准确的地理位置信息和路线规划。
许多车辆和移动设备都配备了GPS导航功能,以帮助用户在陌生地区导航。
此外,GPS还被用于航空、航海和军事领域,以帮助飞行器和船只进行导航和定位。
另外,GPS还被用于科学研究、天文学、地质学等领域,以支持地球测量和环境监测。
GPS对社会产生了深远的影响。
它为出行提供了更方便、精确的导航服务,节省了时间和精力。
同时,它也为紧急救援提供了重要的辅助工具,可以在紧急情况下准确定位受困人员的位置。
此外,GPS还在环境监测和资源调查中发挥重要作用,有助于保护和管理地球资源。
基于单片机的GPS定位系统设计文献综述GPS定位系统是一种利用全球卫星定位系统(Global Positioning System,GPS)来确定地理位置的技术。
在现代社会,GPS定位系统在各个领域中广泛应用,包括交通、军事、航空航天、物流等。
基于单片机的GPS定位系统是其中的一种应用方式,通过使用单片机作为主控芯片,实现对GPS模块的控制和数据处理,可以实现车辆、人员等的实时定位和追踪。
本文将对基于单片机的GPS定位系统进行综述,包括定位原理、系统组成、关键技术以及应用场景等方面的内容。
1. 定位原理GPS定位系统是基于卫星信号的定位技术,通过接收来自卫星的定位信息,利用三角测量等方法计算出自身的地理位置。
GPS系统由24颗卫星组成,其中至少有4颗卫星同时可见时,就能够确定一个点的位置。
基于单片机的GPS定位系统通过接收和解析卫星发射的导航信号,计算出自身的经纬度信息,从而实现定位功能。
2. 系统组成基于单片机的GPS定位系统主要由三个部分组成:GPS模块、单片机和显示模块。
2.1 GPS模块:GPS模块是实现定位功能的关键部件,它接收卫星发射的导航信号,并将信号转换为数字信号供单片机使用。
GPS模块通常包括天线、接收机和定位引擎等部分。
2.2 单片机:单片机是系统的核心处理器,负责接收和处理GPS模块传递过来的定位数据,并进行进一步的计算和控制。
单片机通常采用较为低功耗的微控制器,具有较好的计算和控制能力。
2.3 显示模块:显示模块将通过单片机处理的定位数据展示给用户,可以采用LCD液晶显示屏、LED数码管等形式,以直观的方式展示地理位置信息。
3. 关键技术基于单片机的GPS定位系统设计中,涉及到以下几个关键技术:3.1 GPS信号接收与解析:GPS信号由卫星发射,经过天线接收后需要进行解析。
这个过程包括信号放大、频率合成、数字信号处理等环节,需要设计合适的电路和算法来实现。
3.2 数据处理与计算:单片机接收到GPS模块传来的经纬度等数据后,需要进行进一步的计算和处理。
一.概述近年来,随着GPS技术的不断发展与创新,其拥有除军事外更广泛的应用领域。
GPS (Global Position System,全球定位系统),全称为NA VSTAR GPS(NA Vigation Satellite Timing And Ranging Global Position System,导航星测时与测距全球定位系统)。
GPS是一个由美国国防部开发的空基全天侯导航系统,它用以满足军方在地面或近地空间内获取在一个通用参照系中的位置、速度和时间信息的要求。
1.GPS发展历程1957年10月第一颗人造地球卫星SputnikⅠ发射成功,空基导航定位由此开始1958年开始设计NNSS-TRANSIT,即子午卫星系统;1964年该系统正式运行;1967年该系统解密以供民用。
1973年,美国国防部批准研制GPS;1991年海湾战争中,GPS首次大规模用于实战;1994年,GPS全部建成投入使用;2000年,克林顿宣布,GPS取消实施SA(对民用GPS精度的一种人为限制策略)。
2.美国政府的的GPS策略两种GPS服务:SPS--标准定位服务,民用,精度约为100M;PPS--精密定位服务,军用和得到特许的民间用户使用,精度高达10M.两种限制民用定位精度的措施(保障国家利益不受侵害):SA--选择可用性,认为降低普通用户的测量精度,限制水平定位精度100M,垂直157M(已于2005年5月1日取消);AS--反电子欺骗。
3.其他卫星导航系统GLONASS(全球轨道导航卫星系统),前苏联Galileo-ENSS(欧洲导航卫星系统,即伽利略计划),欧盟北斗导航系统,中国。
二.GPS构成GPS系统=空间部分+控制部分+用户部分图1 GPS构成1.空间部分GPS空间部分主要由24颗GPS卫星构成,其中21颗工作卫星,3颗备用卫星。
24颗卫星运行在6个轨道平面上,运行周期为12个小时。
保证在任一时刻、任一地点高度角15度以上都能够观测到4颗以上的卫星。

文献综述摘要 :通过参考文献资料,围绕着3S技术在城市规划中的应用这个问题,阐述了地理信息系统、全球定位系统、遥感技术的优点还有它们在城市规划领域中的作用及3S技术向着集成化智能化发展给城市规划这一古老的学科带来的飞速发展。
并通过案例分析阐明了充分利用3S技术进行城市规划工作,可以降低成本、减少工作量、提高工作效率还可增加规划的准确性。
关键词:全球定位系统地理信息系统遥感技术城市规划1 引言城市规划(urban planning)研究城市的未来发展、城市的合理布局和综合安排城市各项工程建设的综合部署。
是一定时期内城市发展的蓝图,是城市建设和管理的依据。
城市规划需完成以下任务:根据国家城市发展和建设方针、国民经济和社会发展长远计划、区域规划,以及城市所在地区的自然条件、历史情况、现状特点和建设条件,布置城市体系;确定城市性质、规模和布局;统一规划、合理利用城市土地;综合部署城市经济、文化、基础设施等各项建设,保证城市有秩序地、协调地发展,使城市的发展建设获得良好的经济效益、社会效益和环境效益。
3S技术的整体结合是集遥感、地理信息系统和全球定位系统技术的功能于一体,构成高度自动化、实时化、智能化和网络化的地理信息系统,是空间信息适时采集、存储、管理、更新以及动态过程的现势性分析与提供决策辅助信息的有利手段,其中GIS是3S技术的核心,它的出现使测量领域产生了一场深刻革命。
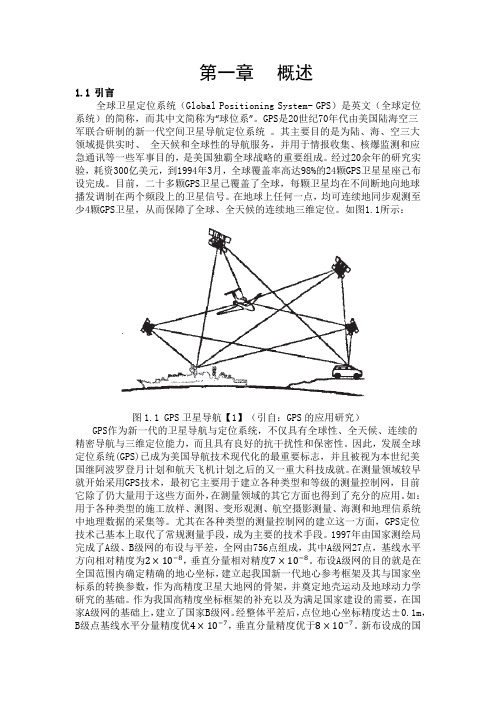
2 3S在城市规划中的应用2.1全球定位系统GPS全球定位系统GPS的工作原理:类似于传统的后方交会,如果在需要的位置某点P架设GPS接收机,在某一时刻同时接收3颗GPS卫星所发射的信号,即测得卫星到测站点的几何距离,就可根据后方交会原理确定出测站点的三维坐标。
全球定位系统GPS的应用:GPS技术在我国的测绘领域得到了应用,例如大地测量中高精度大地控制网的建立,特别足国家的 A、B级网平均边长在 50Km 以上,常规的测角、测距手段,网精度很难保证,并且费时又费力。

GPS全球定位系统的应用摘要GPS(Global Positioning System,全球定位系统),是一个全球性、全天候、全天时、高精度的导航定位和时间传递系统。
智能交通系统(ITS)是未来交通系统的发展方向,它是将先进的信息技术、数据通讯传输技术、电子传感技术、控制技术及计算机技术等有效地集成运用于整个地面交通管理系统而建立的一种在大范围内、全方位发挥作用的,实时、准确、高效的综合交通运输管理系统。
其中,交通信息采集系统是最为基本、最重要的系统之一。
它为交通管理、交通信息公众发布等提供了大量的基础交通信息,是其他交通管理系统应用的基础。
本文以GPS在智能交通系统(ITS)中的典型应用为例,介绍了GPS系统的组成、定位原理、定位误差以及GPRS网络结构、业务特点等,并以台湾皇家数码出品的GPS 模块作为地理信息数据采集载体,BENQ M22 GPRS模块作为数据发送载体,设计了一个简单的交通信息资源采集系统与应用系统。
该系统能够根据需要在确定的地理位置采集定位信息,如经纬度信息,并标记此地理位置,当再次途径此地理位置时,自动用语音报告该地理位置信息,可对已采集的地理信息进行人工编辑,包括删除某一地理坐标,在两地理坐标之间插入一新的地理坐标,修改某地理坐标的标记,通过GPRS模块将设备当前所在的地理位置坐标以短信的方式发送到预先设定的数据处理中心,以作进一步处理。
文中对硬件和软件的具体实现给予了深入探讨,详细分析了GPS输出数据的通信标准及其数据帧的接收和参数提取的方法,最后对系统测试结果进行了处理和分析并给出了系统的总结与展望。
关键词GPS;GPRS;信息资源采集THE APPLICATION OF GLOBALPOSITIONING SYSTEMABSTRACTGPS is a global, all-weather, high-precision navigation and positioning and time delivery system. The intellectual traffic system (ITS) is the direction of the traffic system in the future. It is of advanced information technology, data communications transmission technology, electronic sensor technology, control technology and computer technology etc., which is effectively integrated throughout the whole applications of traffic management systems on the ground, and set up a widely full use, real-time, accurate and efficient integrated traffic management system. The traffic information collection system is the most basic and important system. It provides a large amount of basic traffic information for traffic management, traffic information masses release etc., and also it is the foundation of the application of other traffic management system. This paper introduces the composition of GPS system, positioning principle, positioning error, GPRS network structure and its business characteristics, etc., and use GPS module which is produced by Royal Digital Company of Taiwan as geographic information data collection carrier, BenQ M22 GPRS module as a data transmission carrier, working out a simple traffic information resources collection and applications system. According to the demand, the system can collect positioning information in the specific location, such as longitude and latitude information, and mark the location. When once again come around that location, the system can automatically use voice to report the information of that location. It can manually edit collected geographic information, including deleting a particular geographical coordinate, inserting a new geographic coordinates between two exist geographic coordinates, modifying a geographic coordinate marking. The geographical coordinates of the current equipment will be sent to the predetermined data processing center through GPRS module in SMS, so that it can make further process. This paper discusses the realization of concrete hardware and software in detail, analyzes the communication protocol of GPS’s output data particularly, and works out a solution to receive data frame and retrieve navigation information from GPS, at last this paper processes the experiment results and gives the conclusion andprospects.KEY WORDS GPS; GPRS; collection of information resources目录摘要 (I)ABSTRACT ........................................................... I I 前言.. (1)1 基础理论 (2)1.1全球定位系统——GPS (2)1.1.1 GPS发展概述 (2)1.1.2 GPS系统组成 (2)1.1.3 GPS卫星信号 (5)1.1.4 GPS定位原理 (5)1.1.5 GPS定位误差 (6)1.1.6 GPS应用前景 (7)1.2通用分组无线业务——GPRS (7)1.2.1 GPRS发展概述 (7)1.2.2 GPRS网络结构 (8)1.2.4 GPRS业务特点 (8)2 硬件设计 (9)2.1 硬件总体框架设计 (9)2.2嵌入式处理器的选择 (9)2.3 GPS模块 (11)2.4 GPRS模块 (12)2.5 LCD显示模块 (12)2.5.1 HG1286416图形点阵液晶模块介绍 (12)2.5.2模块主要硬件构成说明 (12)2.5.3模块的外部接口 (14)2.6 键盘模块 (15)2.7串口模块 (15)2.8 GPS数据存储 (16)2.9语音模块 (17)3 软件设计 (20)3.1 软件总体框架设计 (20)3.2.1 GPS数据格式(NMEA-0183) (22)3.2.2 GPS数据接收与处理 (23)3.3 GPRS模块软件 (26)3.4 LCD显示模块 (27)3.6 串口通讯模块 (29)3.7 站点管理模块 (29)3.7.1 新增站点 (29)3.7.2 删除站点 (30)3.7.3 报站 (30)3.8 语音模块 (31)4 软硬件调试与测试结果 (33)4.1 软硬件调试步骤 (33)4.2 软硬件调试中遇到的问题 (33)4.3 测试结果 (34)5 总结与展望 (35)附录 (37)致谢 (39)前言随着国内交通基础设施的建设和完善,许多城市相继建立了各种类型的交通管理应用系统。

1.GPS工程测量及数据处理研究-文献综述本科毕业论文文献综述题目:GPS在工程测量中的应用及数据处理姓名:赵建平学号2009303200901 专业:地理信息系统指导教师:苗洁职称讲师中国·武汉二○一三年一月分类号密级华中农业大学本科毕业论文文献综述GPS在工程测量中的应用及数据处理GPS in Engineering Measurementand Data Processing学生姓名:赵建平学生学号:2009303200901学生专业:地理信息系统指导教师:苗洁讲师华中农业大学资源与环境学院二○一三年一月Ⅰ目录1.GPS和工程测量等相关概念 (2)1.1G PS相关概念 (2)1.1.1 GPS概念 (2)1.1.2 GPS技术 (3)1.1.3 GPS卫星测量原理 (3)1.1.4 GPS 测量的技术特点 (4)1.2 工程测量介绍 (5)2. GPS 在现代工程测量中的具体应用分析 (5)2.1实时动态(RTK)定位技术简介 (5)2.2 静态GPS在工程测量中的应用 (6)2.3 动态GPS在工程测量中的应用 (7)3.工程测量及数据处理 (7)3.1工程控制网数据处理方法 (7)3.2 GPS基线处理与质量控制 (8)3.2.1 GPS基线边的解算 (8)3.2.2 各种检核计算 (9)3.2.3 平差计算和成果分析 (9)4.分析与总结 (10)5.参考文献 (11)6.致谢 (12)GPS工程测量及数据处理研究Ⅱ摘要:GPS测量技术具有测量时间短、技术含量高、精确度高等优点,在工程测量实践中发挥着越来越重要的作用。
本文主要通过介绍GPS的系统组成、工作原理、技术特点等基本情况,系统总结了GPS技术在工程测量中的应用情况,及其在工程测量后的数据处理方法。
Ⅲ关键词:全球定位系统;GPS测量技术;工程测量;应用;静态测量;动态测量;数据处理1.GPS和工程测量等相关概念1.1GPS相关概念1.1.1 GPS概念GPS是英文Navigation Satellite Timing And Ranging/Global Positioning System卫星测时测距导航/全球定位系统)的简称,而其中文简称为“球位系”。
GPS的基本原理和与之相关的综述摘要:本文介绍IGS及GPS全球定位系统的组成及工作原理;介绍GPS数据格式RINEX;同时时阐述TEQC软件对GPS数据的精确度检验。
关键词:IGS GPS RINEX TEQC0 IGS的说明在全球地基GPS连续运行站(约200个)的基础上所组成的IGS(International GPS Service),是GPS连续运行站网和综合服务系统的范例。
它无偿向全球用户提供GPS各种信息,如GPS精密星历、快速星历、预报星历、IGS站坐标及其运动速率、IGS站所接收的GPS信号的相位和伪距数据、地球自转速率等。
这些信息在大地测量和地球动力学方面支持了无数的科学项目,包括电离层、气象、参考框架、精密时间传递、高分辨的推算地球自转速率及其变化、地壳运动等。
目前,IGS组织定期向用户提供以下两类数据:一是IGS全球跟踪站的观测数据;二是IGS的产品,包括:①GPS卫星的密星历、快速星历、预报星历;②GPS卫星钟和站钟的信息;③地球自转参数;④IGS跟踪站坐标及其位移速度等(赖锡安等,2004)。
IGS定期把这些数据存放在网站(ftp://)的FTP服务器上。
IGS现在提供的轨道有三类:一是最终(精密)轨道,要在10—12天以后得到它,常用于精密定位;二是快报轨道,要在1天以后得到,它常用于大气的水汽含量、电离层计算等;还有一类是预报轨道IGS还提供极移和世界时信息。
IGS提供的一个极为有用和重要的信息是IGS的那些连续运行站(跟踪站)的坐标、相应的框架、历元和站移动速度。
前者精度好于1cm,后者精度好于1mm/y。
IGS站坐标所采用的坐标参考框架是和IERS互相协调的。
1993年末开始使用ITRF91,1994年使用ITRF92,1995年到1996年中期使用ITRF93,1996年中期到1998年4月一直使用ITRF94,1998年3月1日转而采用ITRF96,1999年8月1日开始IGS采用ITRF97。

GPS系统文献综述和参考文献GPS系统可以为全球任意地点,任意多个用户有效的提供全天候、高精度、连续实时的三维定位、三维测速及高精度时间基准。
由于这一定位系统在定位、导航、时间基准等应用方面的高效率和高精度,早期为军事服务,现已在各个学科实践中有广泛的应用,地质勘测及大地测绘等领域则较早的引入了GPS技术。
包括地质能源资源勘探、各类工程测量、板块移动、地震监测等关乎国计民生的重要领域在大量使用GPS定位技术[1],其中定位方法有:伪距差分定位法、载波相位差分定位测量及干涉测量等,以及后续发展的三重差算法等。
所以在勘探过程中合理选择定位技术用最小的成本换取最好的结果。
28736我国在工程项目及科研领域使用GPS技术进行定位已有多年历史,中国科学院、地质矿产部等单位及部门相继从美国购入GPS全球卫星定位系统。
早在1986年我国在西北边疆地区完成了卫星定位网。
由于我国处于多震的位置,地处环太平洋和地中海—喜马拉雅这两个地震带交界处,是地球上目前最活跃的地震带之一。
石油天然气总公司物探局自1988年引进GPS技术,已组建了5个卫星定位队,至今已为油气资源勘探提供近3000个卫星定位点,充分保证在复杂困难地区勘探工作的顺利进行,在塔里木油气资源勘探中有着不可磨灭的贡献,在内蒙古的二连盆地的测绘工作同样也大量依托GPS技术。
目前技术水平,我国静态定位精度完全可达到毫米级,动态定位精度达。
如今使用广泛的定位方法有两种:第一是利用普通手持GPS工作,此方式在精度要求较低(误差10m)情况下定位,如地质考察、地质取样、大范围进行重力勘测以及电法和磁法勘探等。
其次就是采用专门的差分GPS定位技术和设备,其精度可达厘米级甚至毫米级,故广泛应用在定位精度要求较高的环境中,如地震炮点及接收点测量、小范围内地球物理勘测和工程勘探。
源自!六%维^;论:文(网.加7位QQ3249'114上述方法在小范围内勘探领域基本上不存在时间及成本问题,但在万道/十万道级大规模3D地震勘探工程中需多次进行数十万个接受点的定位测量,时间成本及经济成本严重制约了当今3D地震勘探的发展。

专业文献综述GPS在道路测量中的应用[前言]随着我国国民经济的快速增长以及西部大开发的实施,我省的高等级公路建设迎来前所末有的发展机遇。
目前公路勘测中虽已采用电子全站仪等先进仪器设备,但常规测量方法受横向通视和作业条件的限制,作业强度大,且效率低,大大延长了设计周期。
勘测技术的进步在于设备引进和技术改造,在目前的技术条件下引入GPS技术应当是首选.段志彪,祝绍朋在《GPS 在道路测量中的应用》一文中说到GPS作为一项高新技术,具有全天候、高精度、速度快等显著特点, 在建筑、交通运输等许多行业中得到了广泛的应用。
简述了GPS测量技术的发展状态, 介绍了GPS测量用于道路测设中的控制测量、路线桩点实时放样测量, 通过利用GPS进行高程测量结果与水准测量结果进行对比分析,最后GPS测量作出了总结。
当前,用GPS静态或快速静态方法建立沿线总体控制测理,为勘测阶段测绘带状地形图,路线平面、纵面测量提供依据;在施工阶段为桥梁,隧道建立施工控制网,这仅仅是GPS在公路测量中应用的初级阶段,其实,公路测量的技术潜力蕴于RTK(实时动态定位)技术的应用之中,RTK技术在公路工程中的应用,有着非常广阔的前景.1关键词:GPS道路应用[主题]:GPS技术应用于公路测量是公路外业勘测的一项重大技术革命,其应用及开发的前景十分广阔.尤其是实时动态(RTK)定位技术在公路测量中蕴含着巨大的技术潜力,GPS 技术在公路测量中的应用及其对公路勘测的巨大推进作用。
一.GPS技术应用在道路测量中的方法段志彪,祝绍朋在《GPS 在道路测量中的应用》提到具体作业方法是设置GPS基准站一台, 并将一些必要的数据, 如坐标系转换参数、预设精度指标、基准站坐标等输入GPS手薄,一台或多台GPS流动站在若干个待测点上设站;基准站与流动站同时接收卫星信号,同时基准站通过电台将其观测值和设站信息一起传送给流动站; 流动站将接收到的来自基准站的数据及GPS观测数据, 组成差分观测值进行实时处理。
![最新浅析gps导航原理论文[五篇范例]](https://img.taocdn.com/s1/m/36ef2979814d2b160b4e767f5acfa1c7aa0082bf.png)
最新浅析gps导航原理论文[五篇范例]第一篇:最新浅析gps导航原理论文摘要本文重点分析了各种不同的地球坐标系以及互相转换,阐述了GPS定位的基本原理,分析了其主要误差来源以及消除方法,并给出了相应的叠代算法,最后,对该方法的实现过程提出了自己的观点。
关键词 GPS;导航;星历;误差全球定位系统(GPS)是英文Global Positioning System的字头缩写词的简称。
它的含义是利用导航卫星进行测时和测距,以构成全球定位系统。
它是由美国国防部主导开发的一套具有在海、陆、空进行全方位实时三维导航与定位能力的新一代卫星导航定位系统。
GPS用户部分的核心是GPS接收机。
其主要由基带信号处理和导航解算两部分组成。
其中基带信号处理部分主要包括对GPS卫星信号的二维搜索、捕获、跟踪、伪距计算、导航数据解码等工作。
导航解算部分主要包括根据导航数据中的星历参数实时进行各可视卫星位置计算;根据导航数据中各误差参数进行星钟误差、相对论效应误差、地球自转影响、信号传输误差(主要包括电离层实时传输误差及对流层实时传输误差)等各种实时误差的计算,并将其从伪距中消除;根据上述结果进行接收机PVT(位置、速度、时间)的解算;对各精度因子(DOP)进行实时计算和监测以确定定位解的精度。
本文中重点讨论GPS接收机的导航解算部分,基带信号处理部分可参看有关资料。
本文讨论的假设前提是GPS接收机已经对GPS卫星信号进行了有效捕获和跟踪,对伪距进行了计算,并对导航数据进行了解码工作。
地球坐标系简述图1背景图片要描述一个物体的位置必须要有相关联的坐标系,地球表面的GPS接收机的位置是相对于地球而言的。
因此,要描述GPS接收机的位置,需要采用固联于地球上随同地球转动的坐标系、即地球坐标系作为参照系。
地球坐标系有两种几何表达形式,即地球直角坐标系和地球大地坐标系。
地球直角坐标系的定义是:原点O与地球质心重合,Z轴指向地球北极,X轴指向地球赤道面与格林威治子午圈的交点(即0经度方向),Y轴在赤道平面里与XOZ构成右手坐标系(即指向东经90度方向)。

GPS定位应用开发综述【文献综述】毕业论文文献综述电子信息工程GPS定位应用开发综述摘要:随着计算机技术,无线通信技术和社会网络概念的深入发展和结合,人们对于位置信息的需求不断扩大,获取移动定位信息的定位技术已成为当前的研究热点。
传统的定位技术比较成熟,但是成本很高,这样就出现了利用软件实现而无需在移动终端或者网络端添加硬件的方法,即基于数据库的定位技术(DCM)。
该方法的定位精度要优于传统的定位技术,可以满足普通用户的定位需求以及相关的位置服务。
关键词:Windows Mobile;GPS定位;Visual Studio 20081.引言国内自2008年奥运会以来,移动商务应用将更加普及,包括手机搜索、手机电视等个性化服务将得到更广泛的应用,企业级移动应用也将更加广泛。
移动通信运营商、设备和终端厂商、服务提供商等产业链各方,都面临着巨大的发展机遇,特别是3G服务的加速到来。
尽管手机定位技术可以和其它不同的行业结合产生不同的应用,但获取衣食住行方面的实用信息以及基于娱乐的位置游戏等需求仍是个人消费市场的主要应用热点[1]。
2. GPS定位的原理与应用2.1 GPS定位的原理GPS全球定位系统主要有三大组成部分,即空间星座部分、地面监控部分和用户设备部分。
GPS 的用户设备主要由接收机硬件和处理软件组成。
用户通过用户设备接收GPS卫星信号,经信号处理而获得用户位置、速度等信息,最终实现用GPS进行导航和定位的目的。
按目前的方案,全球定位系统的空间部分使用24颗卫星组成卫星星座。
24颗卫星均为近圆形轨道,分布在6个轨道面上(每轨道面四颗)。
卫星的分布使得在全球的任何地方,任何时间都可观测到四颗以上的卫星,并能保持良好定位精度[2]。
这就提供了在时间上连续的全球导航能力。
GPS的基本定位原理是:卫星不间断地发送自身的星历参数和时间信息,用户接收到这些信息后,经过计算求出接收机的三维位置、三维方向以及运动速度和时间信息。
GPS技术及运用前言自从1978年2月22日第一颗GPS试验卫星进入轨道以来,34年间GPS已经显示了它巨大的社会、军事作用与经济、社会效益。
GPS卫星发射的导航、定位信号,作为一种时空信息资源,可在全球范围内向无数用户提供位置、速度和时间信息。
GPS是一个全球性、全天候、全天时、高精度的导航定位和时间传递系统,空间部分由24颗卫星组成,主要是用于军用,现在己经渐渐转变为军民两用系统。
随着GPS向民用开放,它所蕴藏的巨大商机也被发掘出来。
GPS不仅用于导弹、飞船的导航定位,更是广泛用于飞机、汽车、船舶的导航定位,公安、银行、医疗、消防等用它建立监控、报警、救援系统,企业用它建立现代物流管理系统,农业、林业、环保、资源调查、物理勘探、电信等都离不开导航定位,特别是随着卫星导航接收机的集成微型化,出现各种融通信、计算机、GPS于一体的个人信息终端,使卫星导航技术从专业应用走向大众应用,成为继通信、互联网之后的IT第二个新的增长点。
GPS主要功能有定位、测量及授时等,而动态(即瞬间)定位是GPS民用的主要功能。
主题1 GPS系统组成[11]整个GPS系统分为三个基本部分: 空间部分:GPS卫星星座;地面控制部分:地面监控系统;用户设备部分:GPS信号接收机[2]。
1.1 空间部分空间部分由21颗工作卫星和3颗在轨道备用卫星组成。
24颗卫星均匀分布在6个轨道平面内,轨道倾角为55度,各个轨道平面之间相距60度。
对于地面观测者来说,位于地平线以上的卫星颗数随着时间和地点的不同而不同,最少可见到4颗,最多可以见到11颗。
1.2 地面控制部分GPS工作卫星的地面监控系统包括一个主控站、三个注入站和五个监测站。
主控站的任务是收集、处理本站和监测站的全部资料,编算出每颗卫星的星历和GPS时间系统。
注入站的任务是将主控站发来的导航电文注入到相应卫星的存储器。
监测站的主要任务是对每颗卫星进行观测,并向主控站提供卫星的观测数据。

文献综述1 前言此节引用了参考文献[1]的内容,全球定位系统(Global Positioning System 简称GPS)是美国第二代卫星导航系统。
它是在子午仪卫星导航系统的基础上发展起来的,GPS能提供全天候、连续、实时高精度导航参数,实现三维定位,并可提供精确的时间信息。
GPS系统由空间部分、地面监控部分和地面接收机部分组成。
GPS定位技术的基本原理是利用测距交会定位的方法。
用户接收机接收到卫星发播的信号并利用本机产生的伪随机噪声码取得距离观测量和导航电文;根据导航电文提供的卫星位置和钟差改正信息计算接收机的位置。
由于GPS具有全球覆盖以及精度高、定位速度快、实时性好、抗干扰能力强等特点。
近年来GPS 在在国内外得到广泛的应用,在经济、军事、科研和社会等各个领域发挥了极大的作用,已成为信息时代不可缺少的一部分。
2 GPS的发展以及应用2.1GPS技术历史背景此节引用了参考文献[2]的内容,1978年2月22日第一颗GPS试验卫星的入轨运行,开创了以导航卫星为动态已知点的无线电导航定位的新时代。
GPS卫星所发送的导航定位信号,是一种可供无数用户共享的空间信息资源。
陆地、海洋和空间的广大用户,只要持有一种能够接收、跟踪、变换和测量GPS信号的接收机,就可以全天时、全天候和全球性地测量运动载体的七维状态参数和三维状态参数。
其用途之广,影响之大,是任何其他无线电接收设备望尘莫及的。
不仅如此,GPS卫星的入轨运行,还为大地测量学、地球动力学、地球物理学、天体力学、载人航天学、全球海洋学和全球气象学提供了一种高精度、全天时、全天候的测量新技术。
2.2 GPS应用此节引用了参考文献[3]的内容,纵观现状,GPS技术有下述用途。
1.GPS技术的陆地应用各种车辆的行驶状态监控;旅游者或旅游车的景点导游;应急车辆(如公安、急救车等)的快速引导行驶;高精度时间比对和频率控制;大气物理观测;地球物理资源勘探;工程建设的施工放样测量;大型建筑和煤气田的沉降检测;板内运动状态和地壳形变测量;陆地以及海洋大地测量基准的测定;工程、区域、国家等各种类型大地测量控制网的测量和建设;请求救援在途实时报告;引导盲人行走;平整路面的实时监控,精细农业。
东海科学技术学院毕业论文(设计)文献综述题目:简易GPS定位仪的设计系:机电系学生姓名:专业:班级:)指导教师:起止日期: 2日“简易GPS定位仪的设计”文献综述前言随着当代科学技术的发展,GPS的应用已涉及到国民经济的各个领域,特别是消费市场的发展以GPS为代表的卫星导航产品在市场中大量的出现,而本设计是比较简单的GPS 显示时间的功能设计.本系统选用的是以A T89C52单片机芯片为系统的控制芯片,GPS处理模块来接收卫星的信号带背光LCD做为时间信息的显示。
本系统只是简单的显示时间信息和市场上带有电子矢量地图的GPS来比较就显的比较简单。
以下介绍本课题相关的参考文献信息,以便使读者更清楚地了解该课题的相关技术要求以及发展动态等内容。
主题GPS时钟主要的设备是GPS处理模块的选择﹑显示器的选择和微处理器的选择,随着信息、交通、安全防卫、农业、渔业、防灾救灾、环境监测等建设方面都需要GPS时间信息的发展,对GPS提出了越来越高的要求[1]。
GPS是一种跨学科集成的技术,本设计用到的是基于单片机来实现对GPS的控制,而市场上GPS的供应商提供的功能更加丰富,根据目前的了解GPS嵌入到手机将会得到实现,全球最大的手机公司NOKIA将会在手机中增加GPS的功能,更加有可能的是GPS的功能决定未来的手机的的等价价位。
因此GPS将会在未来发挥很大的作用[2,3]。
本设计将以A TEML的单片机技术为核心对GPS发送的信号进行处理并送到液晶显示器显示的设计,所以就需要熟悉单片机系统设计的基本方法,熟练掌握单片机系统的整体设计思路。
要熟悉单片机的内部硬件结构、各种软件功能、I/O口、中断、内部存储器、GPS 的原理、显示器的控制等,以及使用Protel99软件、设计并绘制电路的原理图和PCB图,这些知识点的掌握是高效的完成本次设计的关键[4,5]。
以上的一些知识点参考了楼然苗, 李光飞编写的《51系列单片机设计实例》第一部分、孙燕,刘爱民编写的《Protel99设计与实例》,这些文献的参考为自己在设计电路时提供了帮助[6,7]。

全球卫星定位系统(GPS系统)论文1.6万字论文,部分源程序(VC++)摘要本文主要论述了从GPS电脑端接收机获取数据,提取数据,以及经过坐标转换成实用的北京54坐标。
从GPS上获得的数据是属于WGS-84中的地心大地坐标,要使它应用于北京54坐标必须经过一系列的坐标转换,最后进行高斯投影。
首先简要论述了地球形状及常用坐标系,GPS系统的组成及运行情况,时间系统,坐标系统及星历等基础知识。
然后重点阐述了从GPS终端接收机中获取数据,提取出经度,纬度,高度,时间等参数,以及WGS84到北京84坐标的转换,并列出了相应的程序和试验数据。
通过MFC编程实现了WINDOWS窗口界面化的输入和显示方式,使烦琐的手动计算变为通过计算机高效准确的转换出来,快速实现了从WGS84到BJ54之间的一系列转换。
关键词:全球定位系统,微软基础类,坐标转换。
2.1.2 似大地水准面由于地球质量特别是外层质量分布的不均性,使得大地水准面形状非常复杂。
大地水准面的严密测定取决于地球构造方面的学科知识,目前尚不能精确确定它。
为此,苏联学者莫洛金斯基建议研究与大地水准面很接近的似大地水准面。
这个面不需要任何关于地壳结构方面的假设便可严密确定。
似大地水准面在海洋上完全重合,而在陆地上也几乎重合,在山区只有2~4m的差异。
似大地水准面经管不是水准面,但它可以严密地解决关于研究与地球自然地理形状有关的问题。
2.1.3 地球近似体大地体是一个不规则的几何体。
在一般应用上,将地球圆球体作为它的第一近似体。
在大地测量学、地图学和精确的航海计算中,应该将大地体当作两极略扁的地球椭球体,才能够得到有足够精度的计算结果。
这种地球椭球体作为大地球体的第二近似体。
在图2.1中,地球椭球体即旋转椭球体,它由椭圆PnqPsq,绕其短轴PnPs,旋转而成的几何体。
椭圆短轴PnPs即地球的自转轴一地轴;短轴的两个端点Pn和Ps是地极,分别被称为地理北极Pn和地理南极Ps;长轴绕短轴旋转所成的平面是赤道平面;长轴端点q旋转而成的圆周是赤道qq’;过短轴的任一平面是子午圈平面,它与地球椭球体表面相交的截痕是一椭圆,称为子午圈,其中由地理北极到地理南极的半个椭圆,叫做地理子午线、子午线或经线。

GPS/INS/红外成像测距组合导航定位系统摘要:组合导航系统是利用各种导航定位系统或设备通过计算机来加以组合。
因为在不同的载体上,完成的使命是不相同的,所以对导航参数要求也不同。
在选取各类导航系统或设备构成组合导航系统时要考虑在技术性能上能相互取长补短的原则,这是最主要的,并能满足特定用途的要求。
再有就是要考虑构成组合系统的灵活性,通常组合系统由“基本设备”和根据实际功能、精度和可靠性的要求而选取的“辅助设备”两大部分组成。
随着人们对地理空间信息的需求日益剧增,那些传统的获取地理空间信息的手段不能满足庞大数据采集的要求,这就要求我们不断去寻求新的方式和方法来解决这些困难所导致的局限性。
本文设计通过安装在移动载体上的多传感器组合,可连续采集地球空间信息,并由地理定位系统为数据提供时间、位置和姿态信息。
研究基于GPS、INS、红外成像测距的多传感器组合地理定位系统,在对捷联惯性导航、差分载波相位GPS定位、以及GPS/INS/红外成像测距组合算法研究基础上,开发其应用软件,并通过一定的实验数据来讨论GPS/INS/红外成像测距组合地理定位系统在某些环境下的精度特性。
关键字:导航定位,多传感器组合,GPS,INS,红外成像测距GPS/INS/Infrared imaging range combined navigation positioning systemAbstract: Integrated navigation system is the use of various navigation and positioning system or equipment through the computer to be combined. Because in different carriers, complete the mission is not the same, so for navigation parameters requirements are different. In selecting all kinds of navigation system or components should consider when integrated navigation system in technical performance on the principle of mutual complement each other can, this is the main, and can meet the requirements of the specific use. Another is a combination to consider the flexibility of the system, usually combination system by "basic equipment" and according to the actual function, accuracy and reliability requirements and selection of "auxiliary equipment" composed of two.As people to geographic space information demand has increased sharply increasing, the traditional for geographic space information means can't meet the requirements of the massive data collection, which requires us to seek new ways and constantly method to solve these difficulties in the limitations.This paper design through the installation in the mobile carrier of the multi-sensor integrated and a collection earth space information, and by geography positioning system for data provide time, position and posture information. Research based on GPS, INS, infrared imaging ranging multi-sensor integrated geographic positioning system, in the strapdown inertial navigation, difference carrier phase GPS positioning, and GPS/INS/infrared imaging location algorithm based on combination research, its application software development, and through certain experimental data to discuss GPS/INS/infrared imaging ranging geographical location system in some combination in the environment of precision characteristics.Keywords: Navigation and positioning , Sensor combination, GPS, INS, Infrared imaging range1.引言组合导航(integrated navigation)是将两种或两种以上的导航系统组合起来的导航方式。

GPS文献综述作者:卢韩好来源:《大经贸·创业圈》2020年第05期【摘要】本文通过文献学习以差分GPS、网络GPS、地基增强系统,星基增强系统为重点。
主要总结了以上文艺的研究现状和研究进展,以及待解决的难题以及未来的发展方向。
对于我们了解以上重点内容有十分重要的帮助。
差分GPS主要应用在武器导航,车辆导航,飞机导航以及电子地图的定位,自动驾驶。
北斗高精度定位技术已在未来城市、自动驾驶、智能手机、共享单车及无人机应用等各领域广泛使用。
SBAS系统能为民用航空提供花费更低、可用性更高的导航功能,并将为航空领域带来巨大的经济和社会效益。
1 GPS分类GPS包括差分GPS、网络GPS、地基增强系统、星基增强系统。
差分GPS(differential GPS-DGPS,DGPS)是首先利用已知精确三维坐标的差分GPS基准台,求得伪距修正量或位置修正量,再将这个修正量实时或事后发送给用户(GPS导航仪),对用户的测量数据进行修正,以提高GPS定位精度。
网络GPS准确地说就是网络RTK,是利用卫星定位连续运行参考站网支持的网络时实动态定位技术[1]。
这种定位较常规GPS速度快,作用范围大,不需要基站。
北斗地基增强系统是一套可以使北斗定位精度达到厘米级的系统,于2014年9月正式启动研制建设,于2016年5月18日正式投入运行。
2018年5月23日,北斗地基增强系统已完成基本系统研制建设,具备为用户提供广域实时米级、分米级、厘米级和后处理毫米级定位精度的能力。
SBAS(Satellite-Based Augmentation System),即星基增强系统,通过地球静止轨道(GEO)卫星搭载卫星导航增强信号转发器,可以向用户播发星历误差、卫星钟差、电离层延迟等多种修正信息,实现对于原有卫星导航系统定位精度的改进,从而成为各航天大国竞相发展的手段。
目前,全球已经建立起了多个SBAS系统,如美国的WAAS、俄罗斯的SDCM、欧洲的EGNOS、日本的MSA、(以及印度的GAGAN。
文献综述摘要:通过对数据一系列处理,运用三阶自回归AR(3)模型拟合gps坐标时间序列,由于gps坐标时间序列数据之间的相关关系,且历史数据对未来的发展有一定影响,并对未来的电力增长进行预测。
理论准备:拿到一个观测值序列之后,首先要判断它的平稳性,通过平稳性检验,序列可分为平稳序列和非平稳序列两大类。
如果序列值彼此之间没有任何向关性,那就意味着该序列是一个没有任何记忆的序列,过去的行为对将来的发展没有丝毫影响,这种序列我们称之为纯随机序列,从统计分析的角度而言,纯随机序列式没有任何分析价值的序列。
如果序列平稳,通过数据计算进行模型拟合,并利用过去行为对将来的发展预测,这是我们所期望得到的结果。
可采用下面的流程操作。
关键字:gps坐标时间序列时间序列分析数据预测一、前言GPS坐标时间序列分析原来是“概率论与数理统计”领域当中的一个重要分支,其中有国际著名的学术杂志“时间序列分析”。
由于在过去的二十几年当中,时间序列分析方法在经济学的定量分析当中获得了空前的成功应用,因此所出现的“时间序列计量经济学”已经成为了“实证宏观经济学”的同意语或者代名词。
由此可见,作为宏观经济研究,甚至已经涉及到微观经济分析,时间序列分析方法是十分重要的。
时间序列分析方法之所以在经济学的实证研究中如此重要,其主要原因是经济数据大多具有时间属性,都可以按照时间顺序构成时间序列,而时间序列分析正是分析这些时间序列数据动态属性和动态相关性的有力工具。
从一些典型的研究案例中可以看出,时间序列分析方法在揭示经济变量及其相关性方法取得了重要进展。
目前关于时间序列分析的教科书和专著很多。
仅就时间序列本身而言的理论性论著也很多,例如本课程主要参考的Hamilton的“时间序列分析”,以及Box 和Jankins的经典性论著“时间序列分析”;近年来出现了两本专门针对经济学和金融学所编写的时间序列专著,这也是本课程主要参考的教材。
另外需要注意的是,随着平稳性时间序列方法的成熟和解决问题所受到的局限性的暴露,目前研究非平稳时间序列的论著也正在出现,其中带有结构性特征的非平稳时间序列分析方法更是受到了广泛重视。
二、本实验采用2000-01~2004-11月gps坐标时间序列数据做时间序列分析模型,数据如下:2000.1 5.4% 2001.9 8.8% 2003.5 13.4%2000.2 15.3% 2001.10 8.5% 2003.6 13.1%2000.3 7.1% 2001.11 7.4% 2003.7 15.2%2000.4 6.9% 2001.12 9.6% 2003.8 15.5%2000.5 12.8% 2002.1 15.4% 2003.9 15.5%2000.6 12.5% 2002.2 -3.2% 2003.10 14.8%2000.7 13.5% 2002.3 6.2% 2003.11 15.6%2000.8 10.6% 2002.4 10.6% 2003.12 13.4%2000.9 7.0% 2002.5 8.5% 2004.1 5.9%2000.10 9.3% 2002.6 13.4% 2004.2 24.7%2000.11 9.4% 2002.7 11.4% 2004.3 15.4%2000.12 8.5% 2002.8 13.7% 2004.4 16.2%2001.1 0.1% 2002.9 18.6% 2004.5 16.6%2001.2 12.8% 2002.10 16.1% 2004.6 14.3%2001.3 9.8% 2002.11 17.1% 2004.7 11.7%2001.4 7.7% 2002.12 14.6% 2004.8 12.1%2001.5 7.7% 2003.1 10.7% 2004.9 11.8%2001.6 8.4% 2003.2 23.2% 2004.10 15.8%2001.7 10.2% 2003.3 16.2% 2004.11 14.4%2001.8 6.3% 2003.4 14.1%首先对数据进行平稳性与纯随机性的检验与判别(一)平稳性的检验我们先采用图示法,时序图如下:X.25.20.15.10.05.00-.05510152025303540455055由图所示,该序列有很大的波动,周期性不明显。
更重要的是该序列的上升或下降趋势并不明显,基本可以确认该序列是平稳的,但直观感受不能认定它就是平稳的,需进一步做检验。
样本自相关图如下:根据序列自相关图可以看出:该序列具有短期相关性,就是随着延期数的增加,平稳序列的自相关系数很快地接近于零,自相关图大部分都在2倍的标准差范围内。
所以确认该序列就是平稳序列。
下面进行纯随机性检验:由自相关图可以知道,该序列延迟16期的自相关系是0.285 0.318 0.418 0.288 0.346 0.282 0.212 0.276 0.211 0.185 0.102 0.087 0.164 0.137 0.063 0.019延迟期的Q 统计值和对应得P值如图:由于Q统计值都很大,而对应的P值都小a,所以拒绝该序列是白噪声的假设,故该序列是非纯随机序列。
三、对模型的识别,我们做出自相关和偏子相关图。
由于该序列的自相关系数大部分落入2倍标准差范围内,而且自相关系数衰减为零的速度很慢,所以表现出拖尾性,而偏自相关系数的三阶在二倍标准差范围外,其他衰减为零的速度很快,所以表现出三阶截尾性,所以可断定该模型是AR(3)模型,即三阶自回归模型。
一、我们采用最小二乘法进行参数估计:从图中我们可以得出模型为:30.1214900.426156t x x tε-=++二、 对模型进行检验(一)参数的显著性检验,如图由于以上参数的t 值显著大于2,p 值小于0.05,所以拒绝参数不显著的假设,即认为这些参数是显著的。
(二) 模型的显著性检验 主要对残差的白噪声检验,如图:由残差序列的自相关与偏自相关的延迟阶数k 下的Q 统计值的p 值都显著大于0.05,可认为该拟合模型的残差序列属于白噪声序列,即该拟合模型显著有效。
四、模型优化模型优化主要有两个准则——AIC和SBC准则我们主要采用施瓦兹准则,分别对AR(1)、AR(2)、AR(3)进行检验,结果依次如下:图表 1AR(1)图表 2AR(2)图表 3AR(3)通过比较可知:各模型中的Schwarz criterion(施瓦兹准则)值在ar(3)模型中最小,所以ar(3)模型是相对优化模型。
六、预测序列未来走势根据模型对未来五年做以下预测,如图:预测模型12 月20041 月20052 月20053 月20054 月2005V2-模型_1 预测.1344 .0941 .1647 .1285 .1301 UCL .2121 .1734 .2455 .2108 .2138 LCL .0567 .0149 .0840 .0463 .0464对于每个模型,预测都在请求的预测时间段范围内的最后一个非缺失值之后开始,在所有预测值的非缺失值都可用的最后一个时间段或请求预测时间段的结束日期(以较早者为准)结束。
同时做出未来五年预测值的置信区间:故预测未来五年电厂电力增长率分别为:0.1344、0.0941、0.1647、0.1285、0.1301,从数据中我们可以发现增长状况相对来讲波动不算太大,基本趋于稳定。
五、gps 坐标时间序列具体计算一元ARMA 模型是描述时间序列动态性质的基本模型。
通过介绍ARMA 模型,可以了解一些重要的gps 坐标时间序列的基本概念。
1 预期、平稳性和遍历性 1.1 预期和随机过程假设可以观察到一个样本容量为T 的随机变量t Y 的样本:},,,{21T y y y这意味着这些随机变量之间的是相互独立且同分布的。
例3.1 假设T 个随机变量的集合为:},,,{21T εεε ,),0(~2σεN i 且相互独立,我们称其为高斯白噪声过程产生的样本。
对于一个随机变量t Y 而言,它是t 时刻的随机变量,因此即使在t 时刻实验,它也可以具有不同的取值,假设进行多次试验,其方式可能是进行多次整个时间序列的试验,获得I 个时间序列:+∞=-∞=t t t y }{)1(,+∞=-∞=t t t y }{)2(,…,+∞=-∞=t t I t y }{)(将其中仅仅是t 时刻的观测值抽取出来,得到序列:},,,{)()2()1(I t t t y y y ,这个序列便是对随机变量t Y 在t 时刻的I 次观测值,也是一种简单随机子样。
定义3.1 假设随机变量t Y 是定义在相同概率空间},,{P Ω上的随机变量,则称随机变量集合},2,1,0,{ ±±=t Y t 为随机过程。
例3.2 假设随机变量t Y 的概率密度函数为:]21exp[21)(22t t Y y y f t σσπ=此时称此时密度为该过程的无条件密度,此过程也称为高斯过程或者正态过程。
定义3.2 可以利用各阶矩描述随机过程的数值特征: (1) 随机变量t Y 的数学期望定义为(假设积分收敛):⎰==+∞∞-tt Y t t t dy y f y Y E t )()(μ 此时它是随机样本的概率极限:∑==∞→Ii i t I t y I P Y E 1)(1lim )((2) 随机变量t Y 的方差定义为(假设积分收敛): 20)(t t t Y E μγ-=例3.3 (1) 假设},,{21 εε是一个高斯白噪声过程,随机过程t Y 为常数加上高斯白噪声过程:t t Y εμ+=,则它的均值和方差分别为:μεμμ=+==)()(t t t E Y E 2220)()(σεμγ==-=t t t t E Y E(2) 随机过程t Y 为时间的线性趋势加上高斯白噪声过程:t t t Y εβ+=,则它的均值和方差分别为:t E t Y E t t t βεβμ=+==)()(2220)()(σεμγ==-=t t t t E Y E1.2 随机过程的自协方差将j 个时间间隔的随机变量构成一个随机向量),,(1'=--j t t t t Y Y Y X ,通过随机试验可以获得该随机向量的简单随机样本。
假设函数),,,(1),,(1j t t t Y Y Y y y y f j t t t ---- 为随机向量t X 的联合概率分布密度,则可以类似地定义:定义3.3 随机过程t Y 的自协方差定义为:)])([(j t j t t t t j Y Y E ----=μμγ上述协方差可以利用联合概率分布密度求解。
1.3 平稳性定义:假设随机过程t Y 的均值函数t μ和协方差函数t j γ与时间t 无关,则称此过程是协方差平稳过程,也称为弱平稳过程。